
A Switched Approach to Image-Based Stabilization for Nonholonomic Mobile Robots with Field-of-View Constraints

Abstract
:1. Introduction
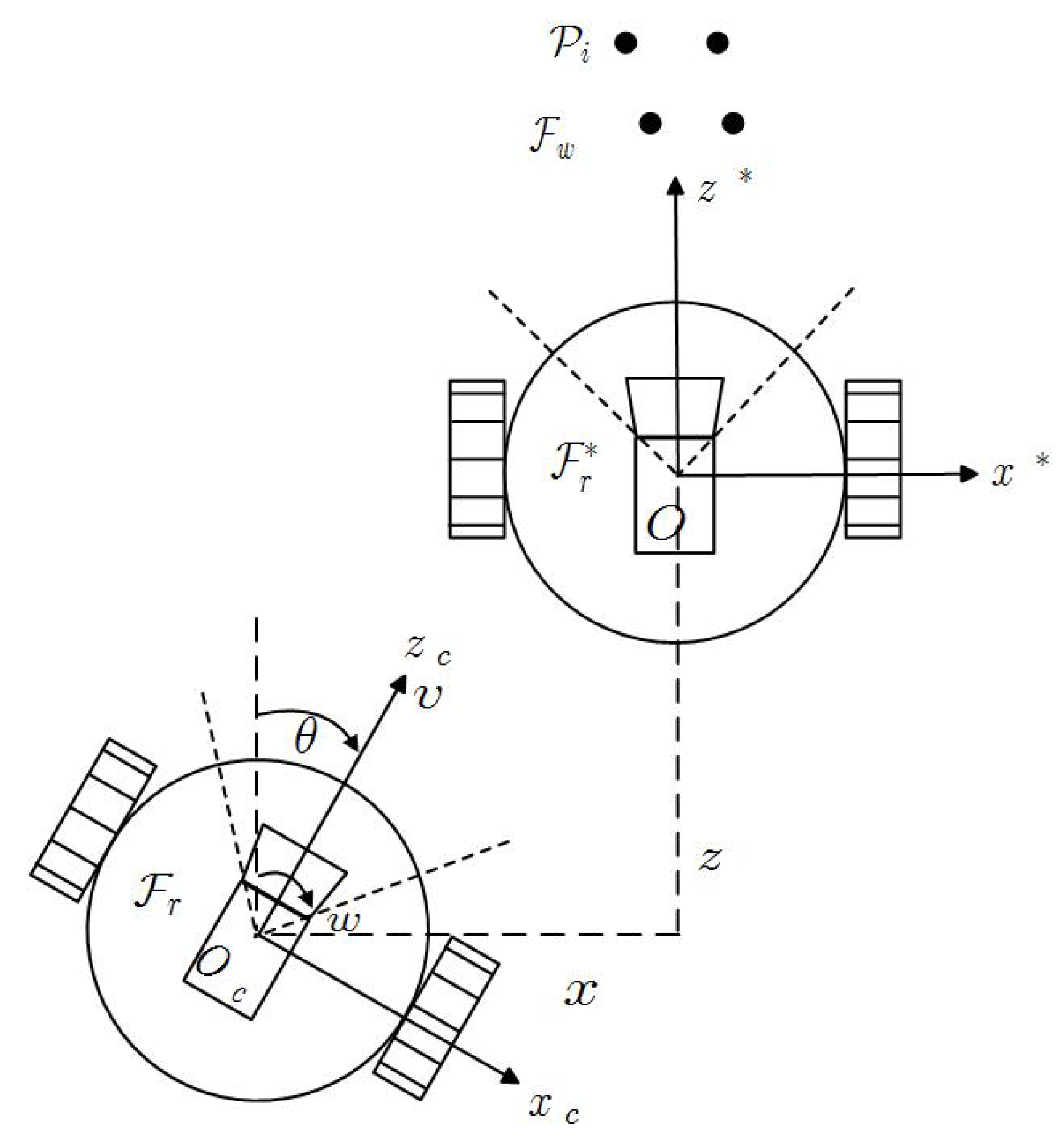
2. Problem Formulation
3. Self-Calibration of Camera Intrinsic Parameters
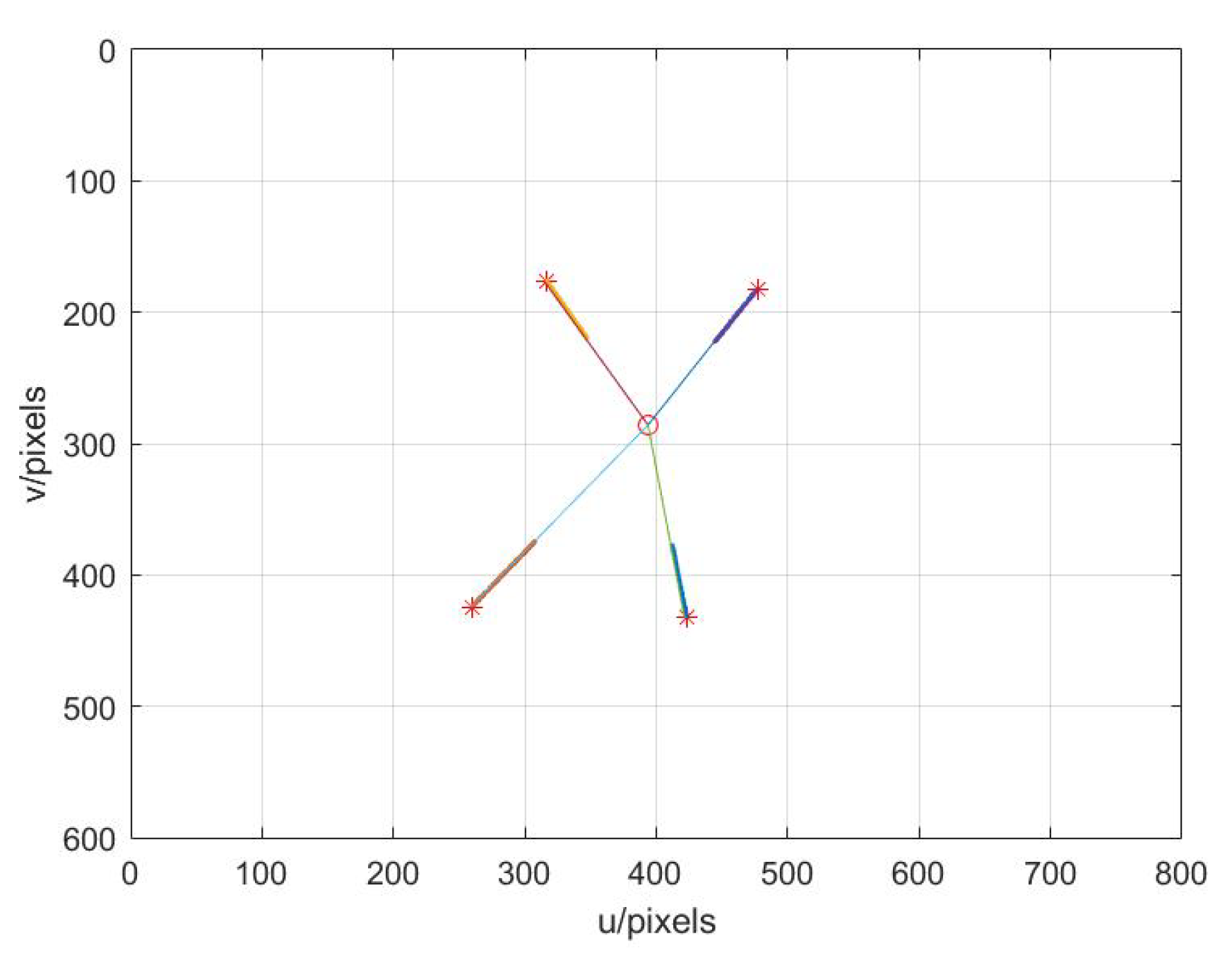
3.1. Self-Calibration of the Principle Point
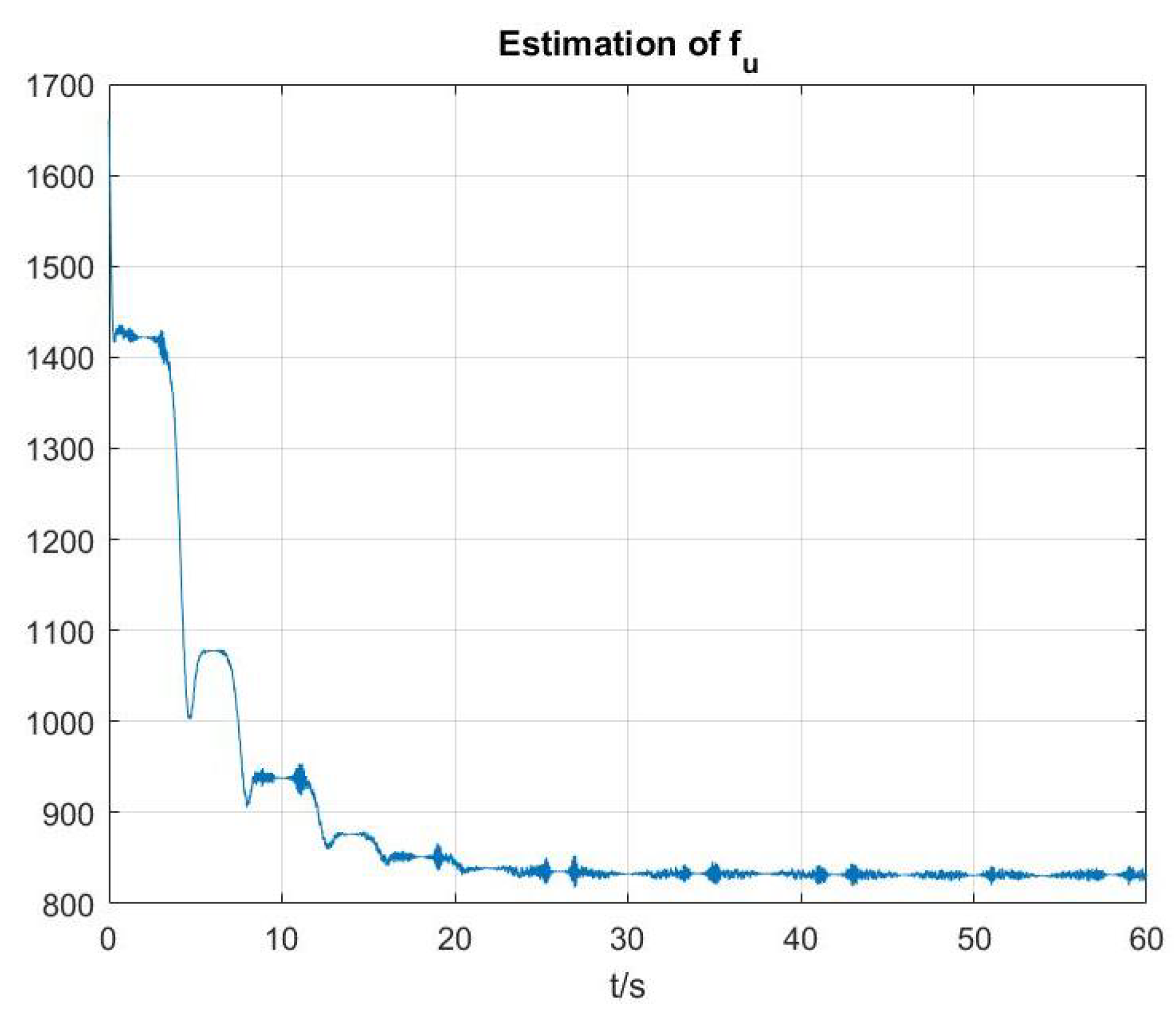
3.2. Self-Calibration of the Scaled Focal Length in x Direction
4. Image-Based Visual Servoing with Limited Field-of-View
4.1. System Model Development
4.2. Control Design without Constraints
4.3. A Switched Approach
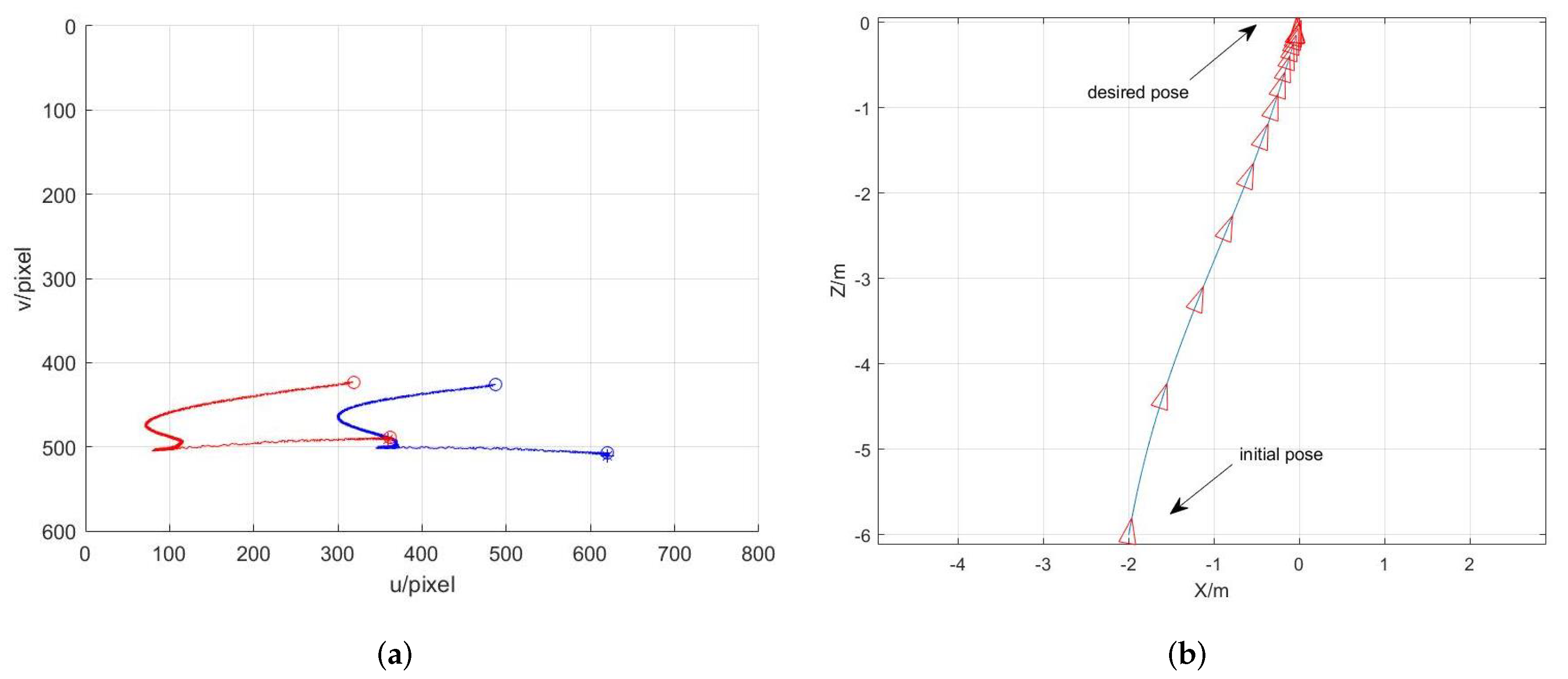
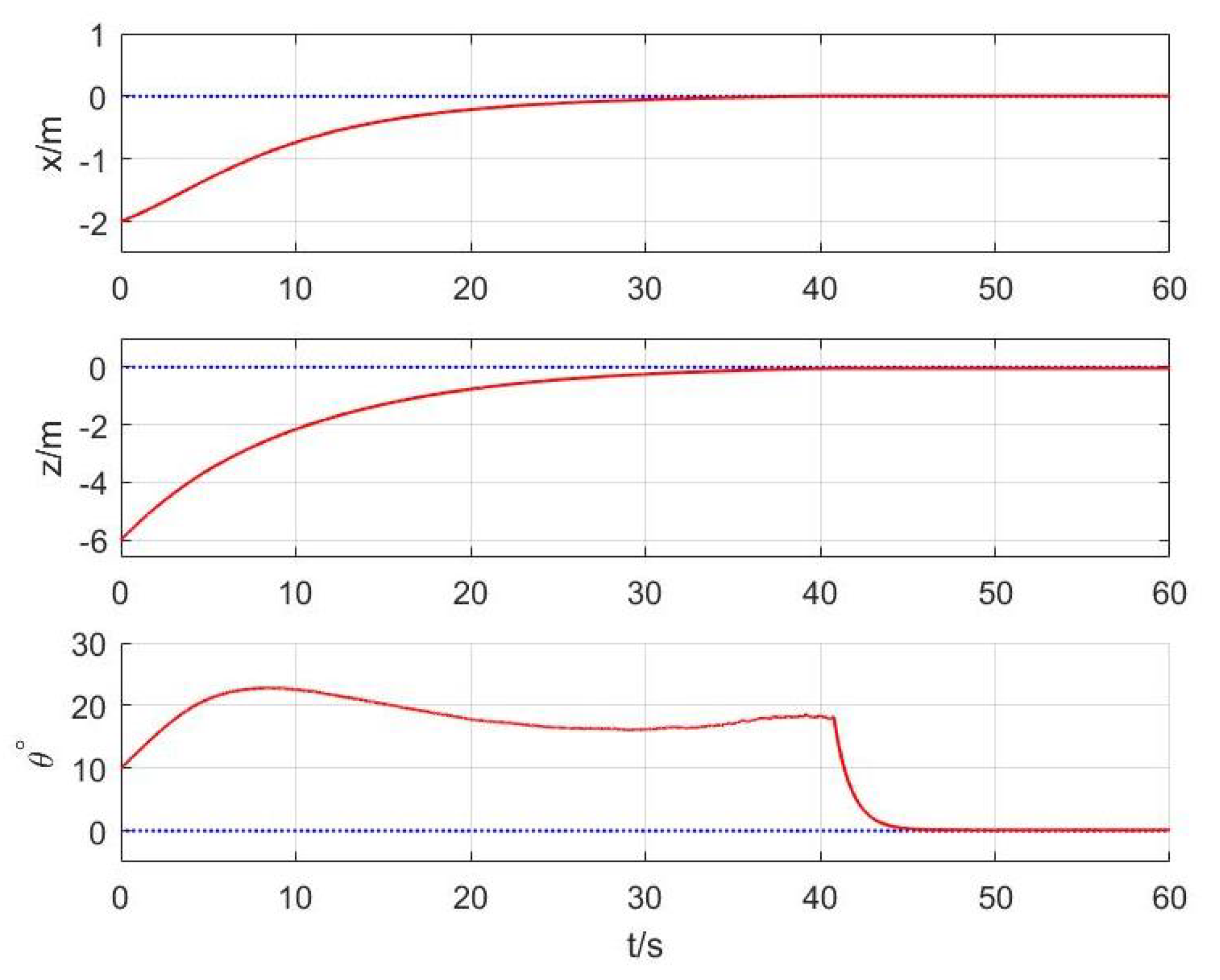
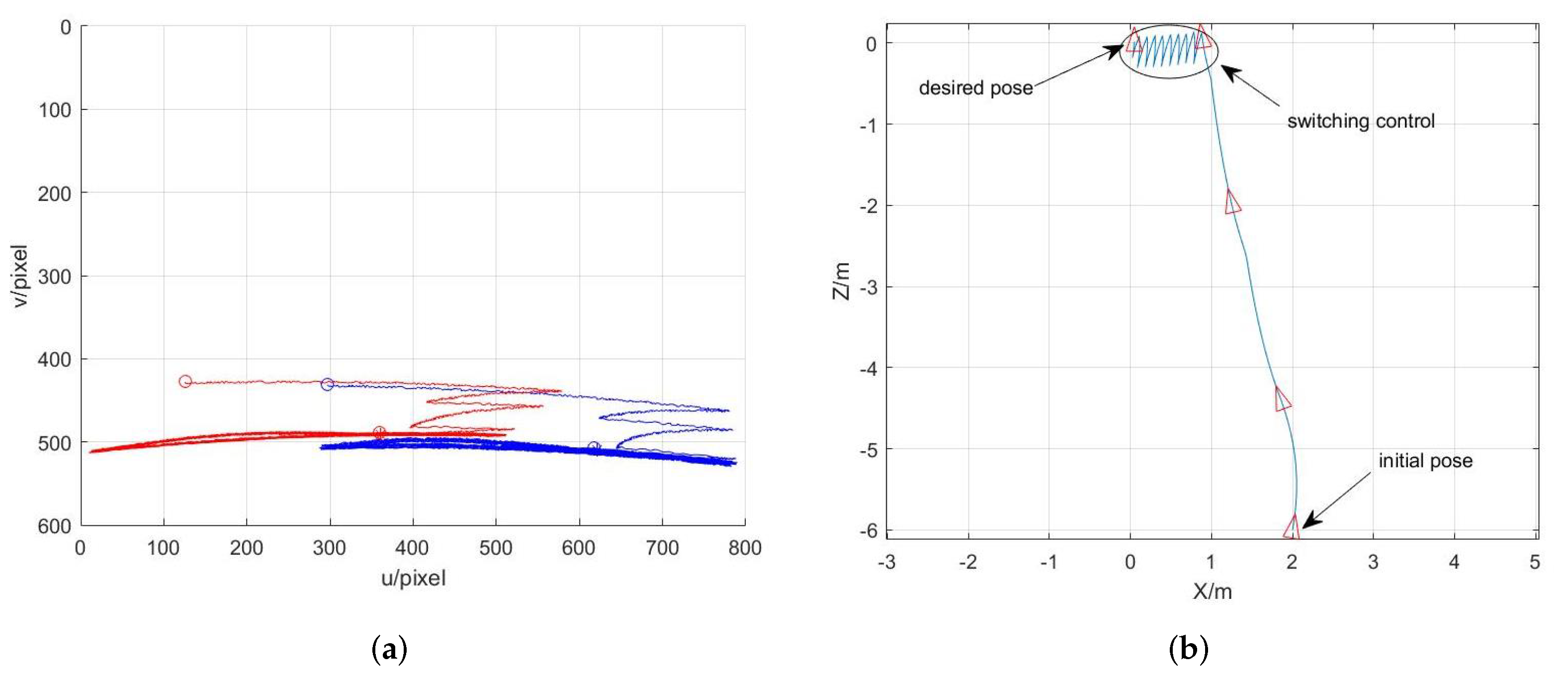
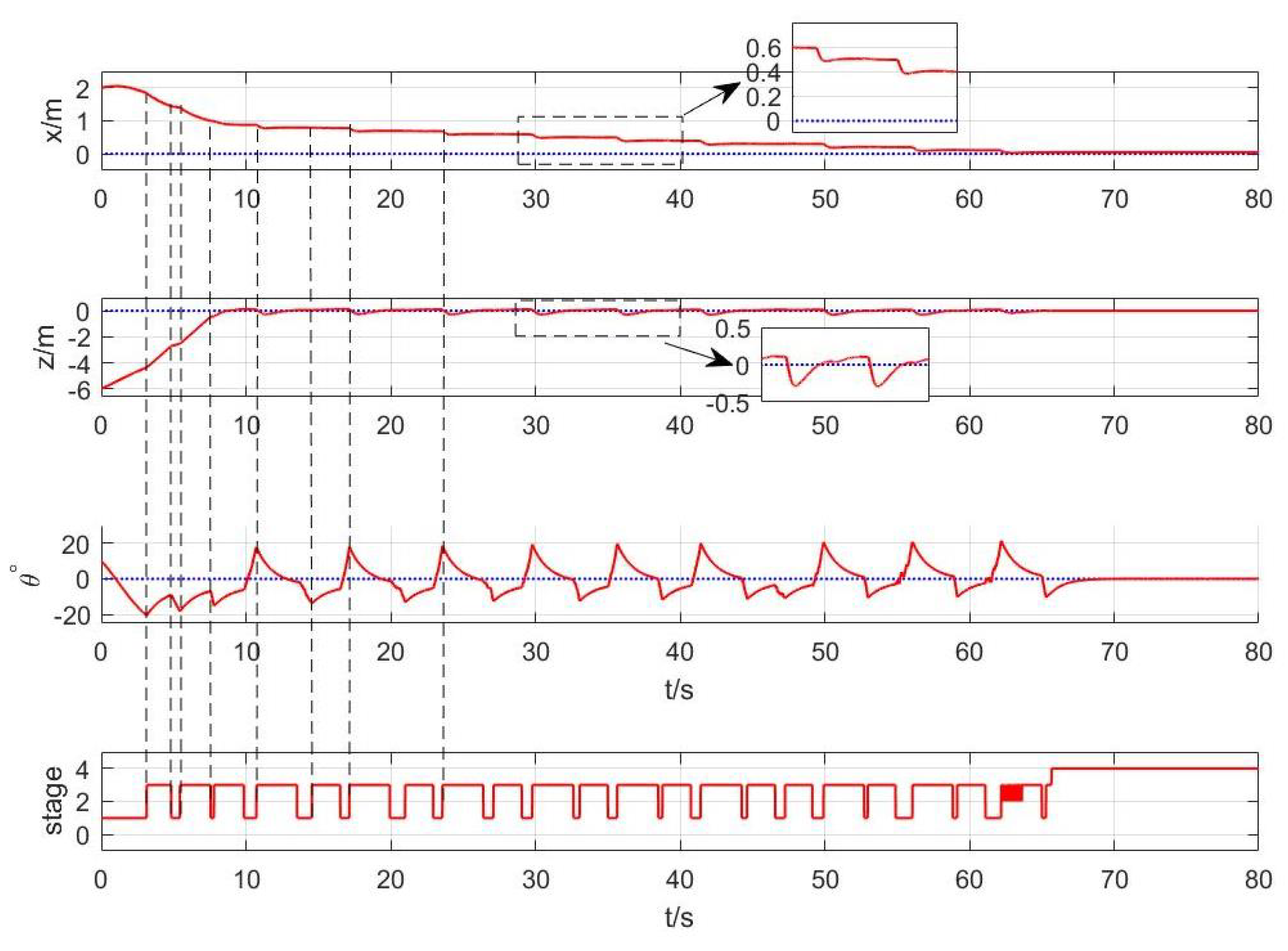
5. Simulations
6. Conclusions
Funding
Conflicts of Interest
References
- Li, B.; Zhang, X.; Fang, Y.; Shi, W. Visual Servoing of Wheeled Mobile Robots without Desired Images. IEEE Trans. Cybern. 2019, 49, 2835–2844. [Google Scholar] [CrossRef] [PubMed]
- Li, B.; Zhang, X.; Fang, Y.; Shi, W. Visual Servo Regulation of Wheeled Mobile Robots with Simultaneous Depth Identification. IEEE Trans. Ind. Electron. 2018, 65, 460–469. [Google Scholar] [CrossRef]
- Ke, F.; Li, Z.; Yang, C. Robust Tube-Based Predictive Control for Visual Servoing of Constrained Differential-Drive Mobile Robots. IEEE Trans. Ind. Electron. 2018, 65, 3437–3446. [Google Scholar] [CrossRef]
- Wang, K.; Liu, Y.; Li, L. Visual Servoing Trajectory Tracking of Nonholonomic Mobile Robots Without Direct Position Measurement. IEEE Trans. Robot. 2014, 30, 1026–1035. [Google Scholar] [CrossRef]
- Freda, L.; Oriolo, G. Vision-based interception of a moving target with a nonholonomic mobile robot. Robot. Auton. Syst. 2007, 55, 419–432. [Google Scholar] [CrossRef]
- Tsai, C.Y.; Song, K.T.; Dutoit, X.; Brussel, H.V.; Nuttin, M. Robust visual tracking control system of a mobile robot based on a dual-Jacobian visual interaction model. Robot. Auton. Syst. 2009, 57, 652–664. [Google Scholar] [CrossRef]
- Chuang, H.M.; He, D.; Namiki, A. Autonomous Target Tracking of UAV Using High-Speed Visual Feedback. Appl. Sci. 2019, 9, 4552. [Google Scholar] [CrossRef] [Green Version]
- Zhang, K.; Chen, J.; Li, Y.; Gao, Y. Unified Visual Servoing Tracking and Regulation of Wheeled Mobile Robots with an Uncalibrated Camera. IEEE/ASME Trans. Mechatron. 2018, 23, 1728–1739. [Google Scholar] [CrossRef]
- Chen, J.; Jia, B.; Zhang, K. Trifocal Tensor-Based Adaptive Visual Trajectory Tracking Control of Mobile Robots. IEEE Trans. Cybern. 2016, 47, 3784–3798. [Google Scholar] [CrossRef]
- Wang, R.; Zhang, X.; Fang, Y. Visual tracking of mobile robots with both velocity and acceleration saturation constraints. Mech. Syst. Signal Process. 2021, 150, 107274. [Google Scholar] [CrossRef]
- Mariottini, G.L.; Oriolo, G.; Prattichizzo, D. Image-Based Visual Servoing for Nonholonomic Mobile Robots Using Epipolar Geometry. IEEE Trans. Robot. 2007, 23, 87–100. [Google Scholar] [CrossRef] [Green Version]
- Fang, Y.; Dixon, W.E.; Dawson, D.M.; Chawda, P. Homography-based visual servo regulation of mobile robots. IEEE Trans. Syst. Man Cybern. Part B Cybern. Publ. IEEE Syst. Man Cybern. Soc. 2005, 35, 1041–1050. [Google Scholar] [CrossRef]
- Zhang, X.; Fang, Y.; Sun, N. Visual servoing of mobile robots for posture stabilization: From theory to experiments. Int. J. Robust Nonlinear Control 2015, 25, 1–15. [Google Scholar] [CrossRef]
- Brockett, R.W. Asymptotic stability and feedback stabilization. Differ. Geom. Control Theory 1983, 27, 181–191. [Google Scholar]
- Huang, Y.; Su, J. Output feedback stabilization of uncertain nonholonomic systems with external disturbances via active disturbance rejection control. ISA Trans. 2020, 104, 245–254. [Google Scholar] [CrossRef]
- Zhang, X.; Fang, Y.; Li, B.; Wang, J. Visual Servoing of Nonholonomic Mobile Robots with Uncalibrated Camera-to-Robot Parameters. IEEE Trans. Ind. Electron. 2017, 64, 390–400. [Google Scholar] [CrossRef]
- López-Nicolás, G.; Gans, N.R.; Bhattacharya, S.; Sagüés, C.; Guerrero, J.J.; Hutchinson, S. Homography-based control scheme for mobile robots with nonholonomic and field-of-view constraints. IEEE Trans. Syst. Man Cybern. Part B Cybern. Publ. IEEE Syst. Man Cybern. Soc. 2010, 40, 1115–1127. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Su, J.B. Simultaneous regulation of position and orientation for nonholonomic mobile robot. In Proceedings of the 2016 International Conference on Machine Learning and Cybernetics (ICMLC), Jeju, Korea, 10–13 July 2016; Volume 2, pp. 477–482. [Google Scholar] [CrossRef]
- Li, B.; Fang, Y.; Zhang, X. Visual Servo Regulation of Wheeled Mobile Robots with an Uncalibrated Onboard Camera. IEEE/ASME Trans. Mechatron. 2016, 21, 2330–2342. [Google Scholar] [CrossRef]
- Fang, Y.; Zhang, X.; Li, B.; Sun, N. A geometric method for calibration of the image center. In Proceedings of the 2011 International Conference on Advanced Mechatronic Systems, Zhengzhou, China, 11–13 August 2011; pp. 6–10. [Google Scholar]
- De Luca, A.; Oriolo, G.; Robuffo Giordano, P. Feature Depth Observation for Image-based Visual Servoing: Theory and Experiments. Int. J. Robot. Res. 2008, 27, 1093–1116. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Murrieta-Cid, R.; Hutchinson, S. Optimal Paths for Landmark-Based Navigation by Differential-Drive Vehicles With Field-of-View Constraints. IEEE Trans. Robot. 2007, 23, 47–59. [Google Scholar] [CrossRef] [Green Version]
- Chesi, G.; Hashimoto, K.; Prattichizzo, D.; Vicino, A. Keeping features in the field of view in eye-in-hand visual servoing: A switching approach. IEEE Trans. Robot. 2004, 20, 908–914. [Google Scholar] [CrossRef]
- Murrieri, P.; Fontanelli, D.; Bicchi, A. A hybrid-control approach to the parking problem of a wheeled vehicle using limited view-angle visual feedback. Int. J. Robot. Res. 2004, 23, 437–448. [Google Scholar] [CrossRef]
- Gans, N.R.; Hutchinson, S.A. A Stable Vision-Based Control Scheme for Nonholonomic Vehicles to Keep a Landmark in the Field of View. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 2196–2201. [Google Scholar] [CrossRef]
- Salaris, P.; Fontanelli, D.; Pallottino, L.; Bicchi, A. Shortest Paths for a Robot With Nonholonomic and Field-of-View Constraints. IEEE Trans. Robot. 2010, 26, 269–281. [Google Scholar] [CrossRef]
- Salaris, P.; Cristofaro, A.; Pallottino, L. Epsilon-Optimal Synthesis for Unicycle-Like Vehicles With Limited Field-of-View Sensors. IEEE Trans. Robot. 2015, 31, 1404–1418. [Google Scholar] [CrossRef]
- Ma, H.; Zou, W.; Sun, S.; Zhu, Z.; Kang, Z. FOV Constraint Region Analysis and Path Planning for Mobile Robot with Observability to Multiple Feature Points. Int. J. Control Autom. Syst. 2021, 19, 3785–3800. [Google Scholar] [CrossRef]
- Karimian, A.; Tron, R. Bearing-Only Navigation With Field of View Constraints. IEEE Control Syst. Lett. 2021, 6, 49–54. [Google Scholar] [CrossRef]
- CVX: Matlab Software for Disciplined Convex Programming; Version 2.0; CVX Research Inc.: Austin, TX, USA, 2012.
- Aicardi, M.; Casalino, G.; Bicchi, A.; Balestrino, A. Closed loop steering of unicycle like vehicles via Lyapunov techniques. IEEE Robot. Autom. Mag. 1995, 2, 27–35. [Google Scholar] [CrossRef]
- Slotine, J.; Li, W.P. Applied Nonlinear Control; Prentice-Hall: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Mariottini, G.L.; Prattichizzo, D. EGT for multiple view geometry and visual servoing. IEEE Robot. Autom. Mag. 2005, 12, 26–39. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.3 | 0.3 | 1 | 5 | 1 | 0.001 | 0.0005 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Y. A Switched Approach to Image-Based Stabilization for Nonholonomic Mobile Robots with Field-of-View Constraints. Appl. Sci. 2021, 11, 10895. https://doi.org/10.3390/app112210895
Huang Y. A Switched Approach to Image-Based Stabilization for Nonholonomic Mobile Robots with Field-of-View Constraints. Applied Sciences. 2021; 11(22):10895. https://doi.org/10.3390/app112210895
Chicago/Turabian StyleHuang, Yao. 2021. "A Switched Approach to Image-Based Stabilization for Nonholonomic Mobile Robots with Field-of-View Constraints" Applied Sciences 11, no. 22: 10895. https://doi.org/10.3390/app112210895