1. Introduction
Maritime transportation represents approximately 90% of global trade by volume [
1], and more than 50,000 ships are sailing in the ocean every day [
2]. As the number of ships continues to grow, the safety of maritime traffic is becoming an increasingly important issue. To strengthen maritime traffic supervision, the International Maritime Organization (IMO) has required the Automatic Identification System (AIS) to be fitted to all Class A ships [
3]. AIS is a new type of navigation aid system that is used to achieve identification, positioning, and collision avoidance among ships, and has 27 types of messages (from message1 to message27) covering dynamic information, static information, voyage information, and safety information [
4]. The traditional shore-based AIS covers about 40 nautical miles and the inter-ship communication range is about 20 nautical miles [
5]. To achieve global coverage of AIS data, AIS receivers have been put onto satellites, creating space-based AIS.
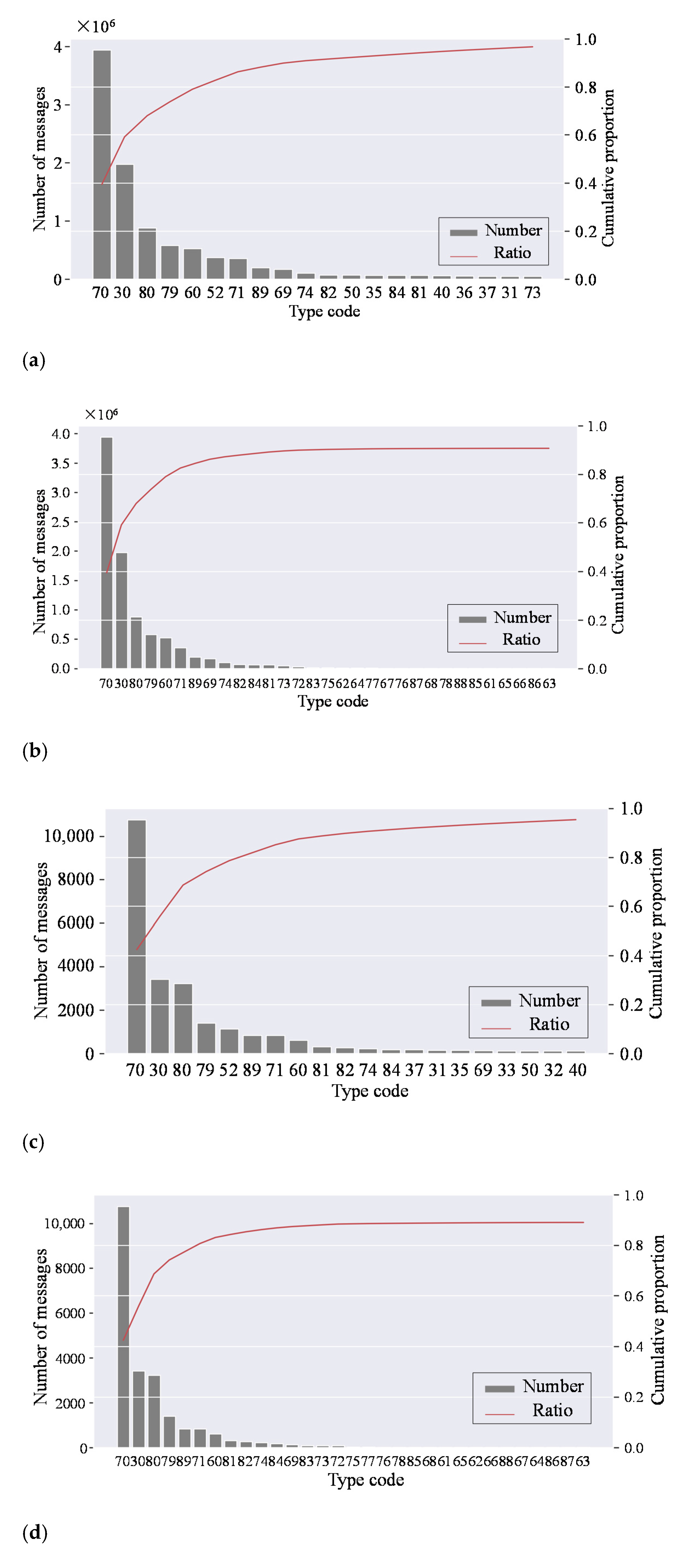
Among all of the messages in AIS data, message5 contains the ship type field, but the type file can be missing, either because it has been set to the default value or filled in incorrectly. There are many ships with unknown types in space-based AIS data. For instance, after matching the type field in the static data (i.e., message5, which contains the static information of ships) received by four satellites (i.e., the ocean satellites HY1C/D and HY2B/C) with the dynamic data received by HY-2B (i.e., message1, which contains the dynamic information of ships) from 1 November 2019 to 21 April 2020, approximately 33% of the ships in message1 have unknown types, the distribution of which are shown in
Figure 1. Furthermore, these ships broadcast few message5, which makes it difficult to identify their types through message5. Except for the problem of the types of ship being unknown, the types of ships may be mislabeled for various reasons [
6,
7], which often relate to violations, such as smuggling and illegal fishing [
8]. These security and law enforcement issues put forward higher requirements for maritime traffic supervision. If ship types can be obtained from historical AIS data, the corresponding prior knowledge of a certain type of ship can be used for maritime traffic management. Thus, accurate identification of ship type is helpful in enhancing the maritime situational awareness of the related departments and is of great value in various areas, such as maritime surveillance, camouflage identification, ship behavioral pattern mining, and anomaly detection.
Existing ship classification methods, based on AIS data, generally consider static and dynamic information.
For static information, Damastuti et al. [
9] use KNN (K-NearestNeighbor) to classify ships based on tonnage, length, and width in Indonesian waters and achieved an accuracy of up to 0.83 on six categories. Zhong et al. [
10] use Random Forest for static information and achieve an accuracy of 0.865 on a three-classification task.
For dynamic information, Hong et al. [
11] study the ships near the Ieodo Marine Research Station, and infer ship types by comparing the flag state of ships and the distribution of their corresponding trajectories with those of type-unknown ships. David et al. [
12] use decision trees to identify fishing boats and achieve an accuracy of 0.8 and an F1 score of 0.7. Moreover, through conducting comparative experiments, they attempt to extract motion features as possible data. Sheng et al. [
13] extract the COG (course over ground), ROT (rate of turn), and global features of vessels in the sea near Shantou, China, and use logistic regression to distinguish fishing and cargo vessels, achieving an accuracy of 0.923. Liang et al. [
14] propose a multi-view feature fusion network that combines the CAE (convolutional auto-encoder) and the Bi-GRU (bidirectional gated recurrent unit) network to classify ships. They realize an accuracy of 95.51% and 94.24% in Luotou Channel and Qiongzhou Strait, respectively. Ginoulhac et al. [
15] extract the statistical features from each temporal variable of AIS data, and the features are then input into a Gradient Boosting classifier; their method has an accuracy of 0.86. Xiang et al. [
16] use p-GRUs (Partition-wise Gated Recurrent Units) to achieve the recognition of trawlers with an accuracy of 0.89. Another similar approach is presented in [
17], which uses RNN (recurrent neural network) to classify five types of ships, with an accuracy of 0.783. In addition, some methods combine dynamic and static features. Kraus et al. [
18] extract geographical distribution features, motion features, time of start/stop, and the static shape features of vessels from AIS data from German Bight and achieve an accuracy of 0.9751 on a five-classification task—however, the method has a data leakage problem. Kim et al. [
19] integrate the vessel’s course change, speed, and environmental information (i.e., tide, light, and water temperature) to identify six types of fishing vessel activities in the waters around Jeju Island, achieving an accuracy of 0.963.
However, there still exists some disadvantages in the methods mentioned above, and they are summarized as follows.
In some studies, only dynamic or static features are used for ship classification. As such, the utilization of multiple characteristics of ships is lacking, and the dynamic features are mainly set manually and empirically.
Most of the existing studies use shore-based data which is usually distributed in a small area, for which the ship trajectories and motion features are restricted. For example, in inland rivers or ports, the ships’ position, speed, and direction are subject to limitations associated with the navigation channels, leading to an insufficient generalization ability of the classifier. Moreover, there is a lack of methods applicable to worldwide ship classification.
The characteristics of space-based AIS data are different from those of shore-based data. Due to the limited number of satellites and the AIS signal conflict, global real-time coverage of AIS cannot currently be achieved. The continuity of space-based AIS data is weak, and there are few long-term ship trajectories with high continuity. The existing ship classification method may not be suitable for space-based AIS data.
The classification number of ships in some researches is few, the differences between ships of different types are obvious, and the binary classification methods have limited application value.
When splitting the sub-trajectories set, some researchers do not specifically distinguish the sources of sub-trajectories, which causes data from the same ship to appear in the training sets, validation sets, and testing sets. This data leakage problem will lead to the performance of the classifiers being overestimated.
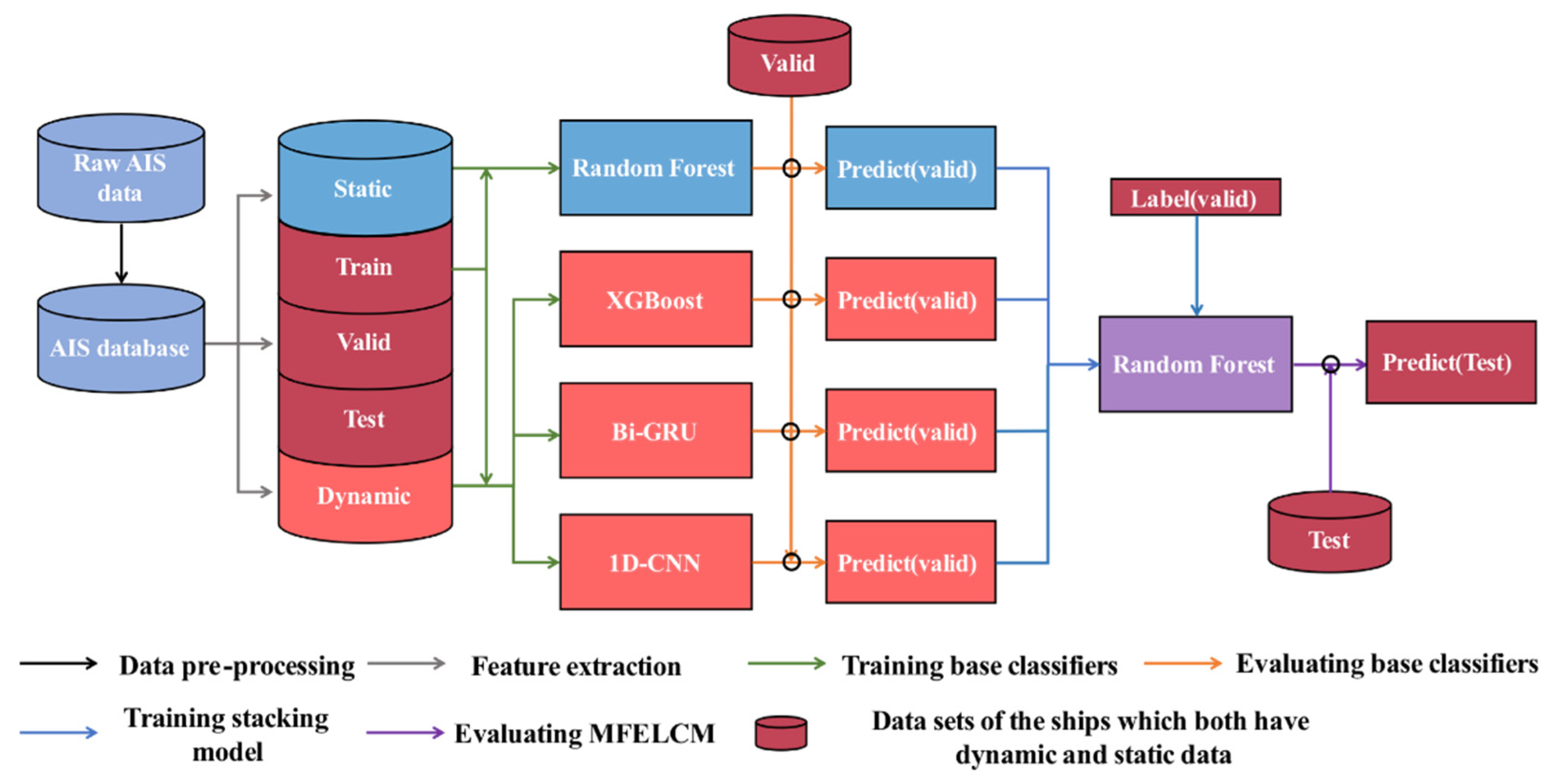
To solve the problems outlined above, this paper proposes a multi-feature ensemble learning classification method (MFELCM) that integrates ships’ static and dynamic information. The method applies to the global range of satellite-based AIS data. The detailed process of MFELCM is shown in
Figure 2, which consists of three steps. In the first step, the original data are preprocessed, and the cleaned static and dynamic data are then converted into static feature samples, dynamic feature distribution samples, time-series samples, and time-series feature samples. In the second step, four base classifiers, namely Random Forest [
20], 1D-CNN (one-dimensional convolutional neural network) [
21], Bi-GRU, and XGBoost (extreme gradient boosting) [
22], are trained by the samples above. In the third step, another Random Forest is applied in order to integrate the base classifiers as MFELCM. The main contributions of this paper are as follows.
A multiple-perspectives method of ship feature description is proposed in order to extract the dynamic and static features of ships from space-based AIS data.
We propose the method to segment trajectories and split the data set by MMSI (Maritime Mobile Service Identity). The latter avoids the data leakage problem during the classifier training process.
The proposed MFELCM, fusing the static and dynamic information, is suitable for the global wide space-based AIS data, which can update the type prediction with the continuous input of AIS data and achieve near real-time online classification. MFELCM can be applied in detecting the abnormal behaviors of ships and, thus, can enhance the capability of maritime supervision.
The model parameters of MFELCM are determined by experiments, and it is verified that MFELCM outperforms the base classifiers. Moreover, when there are insufficient samples for a certain base classifier (e.g., dynamic feature distribution samples), the degraded MFELCM, integrated with the remaining base classifiers, can also achieve acceptable classification accuracy, which extends the application scope of MFELLCM.
The rest of this paper is organized as follows. In
Section 2, the data from the ocean satellite HY-2B is taken as an example to present a basic introduction of space-based AIS data, including data pre-processing, data volume, and ship type distribution.
Section 3 illustrates the detailed implementation of MFELCM, including static and dynamic features extraction, samples construction for different base classifiers, data set splitting, and the implementation of base classifiers. In
Section 4, MFELCM is applied to the real AIS data, and the performance of the model is evaluated. In addition, we discuss the effectiveness of degraded MFELCM without a certain base classifier.
Section 5 concludes the full paper and presents an expectation for future work.
3. Methodology
MFELCM integrates dynamic and static features of AIS data for ship classification. To realize MFELCM, the static feature dataset and the dynamic feature datasets, i.e., (dynamic feature distribution dataset), (time-series dataset), and (time-series feature dataset) are firstly constructed. The four base classifiers (i.e., Random Forest, 1D-CNN, Bi-GRU, and XGBoost) are then trained by , , , and , respectively. Finally, the MFELCM model is obtained by integrating the output of base classifiers using another Random Forest.
3.1. Static Feature Samples Construction
MFELCM integrates dynamic and static features of AIS data for ship classification. To realize MFELCM, the static feature dataset and the dynamic feature datasets, i.e., (dynamic feature distribution dataset), (time-series dataset), and (time-series feature dataset) are as follows.
For the static data
, five features, i.e., ship length, ship width, aspect ratio (ldivw), area, and ship girth, are added into
according to Equations (1) and (4). The static data
is redefined as Equation (5). In addition, the missing features in
are filled with 0.
As ship static information can be entered artificially, we should remove the unreasonable data before training classifiers. The distribution of static data is variable between the different types of ships, which makes it difficult to identify unreasonable data by a uniform standard for all categories. To filter the outliers, we first calculate the upper quartile (
), the lower quartile (
), and the interquartile (
) of a certain type of ship (e.g., passenger ships). If a feature in
(e.g.,
belongs to a passenger ship) is outside
, then
is recognized as an outlier and should be removed. We use this approach because it has no mandatory requirements on data distribution and is robust to outlier identification. A violin plot is the combination of box plot and KDE (kernel density estimation), and it can show the distribution of the variables. To illustrate the changes in the static features before and after removing outliers, we use a violin plot to visualize the static data, as shown in
Figure 6. It should be noted that the data in
Figure 6 is the static data after being standardized in accordance with the whole data set.
Figure 6a,b are the distribution of original static data and the data having removed outliers of passenger ships, respectively.
Figure 6c,d are the distribution of original static data and the data having removed outliers of four types of ships. Take
Figure 6a as an example: the green part inside the red rectangle reflects part of the probability density function (PDF) of feature A, which takes the maximum value near the value where standardized A takes −2. The black part inside the blue rectangle represents the potential outliers judged by feature ldivw; the more the data is biased to both ends of the feature (i.e., ldivd) value, the more likely it is to be an outlier. By comparing
Figure 6a–d, some obvious outliers are removed effectively.
So far, we have obtained the static feature sample
. Let the set of all static feature samples be the static dataset
SF, which is defined as Equation (6)
3.2. Dynamic Feature Samples Construction
For in , add the features in Equation (7) into , then is redefined as Equation (8). For in , the supplementary features of defined by Equation (7) take the same value as those in except that , , , , and take the value zero.
We add the features above into
for the following reasons. The time interval
is associated with ships’ motion state [
4] in
Table A1. Sang et al. [
26] and Kim et al. [
19] pointed out that AIS equipment installed on different types of ships is of various cost and performance (e.g., fishing boats tend to install AIS equipment with low cost and accuracy), which may lead to the deviation of
COG,
SOG,
ROT and other kinematic information. Considering the situation mentioned above, we calculate
,
,
,
, and
. Although the supplementary dynamic features may be redundant for ship motion state description, they can improve the anti-noise capability of the classifier.
As shown in
Figure 7, we describe the trajectory
from three aspects, which are
,
, and
.
is the distribution of the dynamic feature of
, which can reflect the overall motion characteristics of
.
is the set of sub-trajectories (e.g.,
) obtained from
, which reflects the short-term time series characteristics of
.
in
is a feature vector extracted from
, which reflects the short-term characteristics of
. Each element in
is a different feature calculated from
, e.g.,
can be the average longitude of
.
and
are defined as Equations (9) and (10).
3.2.1. Dynamic Feature Distribution Samples Dataset ()
Let
be the dynamic feature distribution of a ship whose MMSI is
, then
is the set of
, which is defined by Equation (11).
Limited by the number of satellites, signal conflicts, or AIS receiver performance [
27,
28], the dynamic data
received by satellite is insufficient to describe
completely. But in a longer period, for a trajectory
, the feature distribution function of
can describe the overall motion of the ship (e.g., the distribution of latitude and longitude in
Figure 7 describes the area of the ship’s activity). In addition, this description can reduce the impact of outliers. For the massive amount of space-based AIS data, it is impractical to calculate the feature distribution function for each
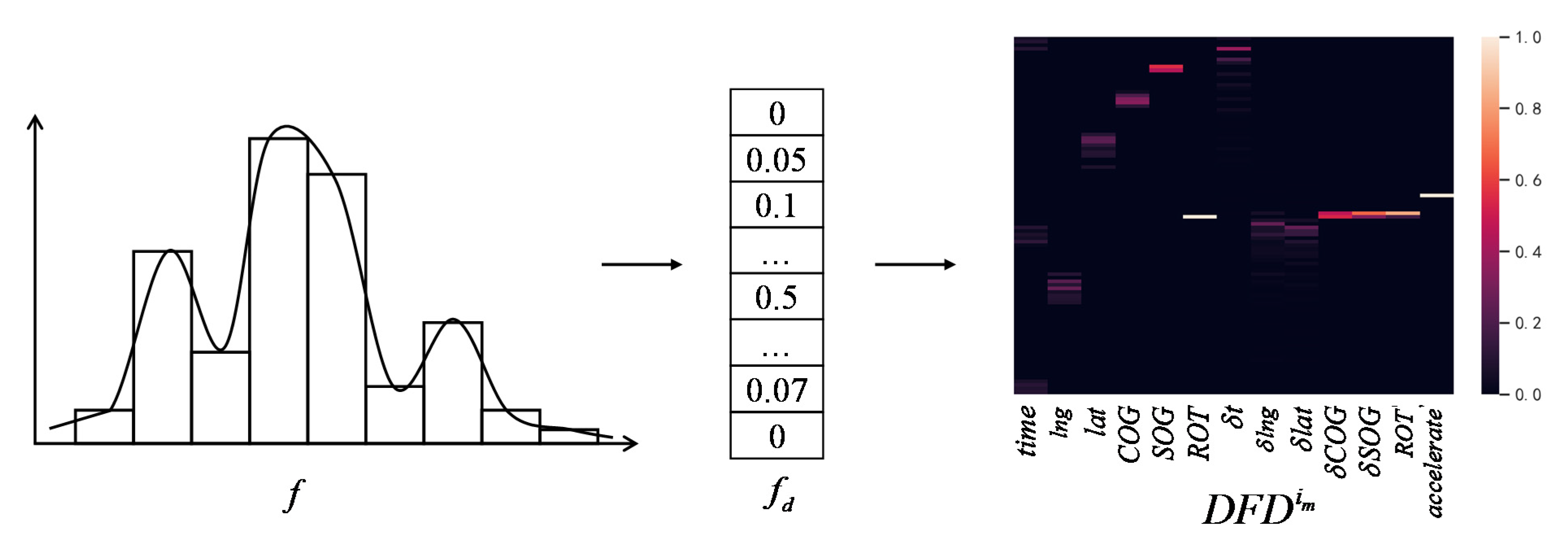
, so we use the frequency histogram to approximate the distribution function, as shown in
Figure 8. For feature f of trajectory
, the range of f on the dataset is sliced uniformly into n intervals, on which the frequency distribution of f (i.e.,
) is calculated. The matrix
in
Figure 8 is the combination of each feature’s frequency distribution. The Time field in
is the number of minutes from the Time field in
to the zero point of the day.
takes 13 features into consideration, excluding the fields of
,
and
.
3.2.2. Time-Series Samples Dataset ()
is defined as Equation (12), where
denotes the set of all sub-trajectories of
, as shown in
Figure 7. Space-based AIS data has weak data continuity, and there are data points between which the time interval is large in
, which cannot reflect the ship movement correctly. As such, we break
into a series of sub-trajectories
. For
, the steps for constructing
are as follows.
Calculate the upper quartile , the lower quartile , and the quartile distance of the field on the whole dynamic dataset.
Traverse the points on in time order. For , if is outside [], break at , then set , , , , and to zero. The sequence from the last interrupted point to constructs the sub-trajectory . All sub-trajectories of construct .
Apply the second step on all trajectories, and then we obtain .
3.2.3. Time-Series Feature Samples Dataset ()
Denote
as all feature vectors of sub-trajectories extracted from
, and then the time-series feature samples dataset
is defined by Equation (13), as shown in
Figure 7. Since it demands professional knowledge to point out the relationship between motion characteristics and the type of ships, we use a python toolkit named tsfresh (Time Series Feature extraction based on scalable hypothesis tests) [
29] to generate
from
automatically.
3.3. Dataset Segmentation
After obtaining the static dataset and the dynamic datasets (i.e., , , and ), the four datasets are split into training, validation, and testing sets. In the dynamic dataset, there is a correlation between the samples generated from the dynamic data of the same ship (e.g., may be similar to ). If we randomly split the dynamic datasets, samples from the same ship can simultaneously appear in training, validation, and testing sets, which will cause data leakage and the overestimation of the classifiers’ performance. In this paper, the datasets are split by the MMSI. Taking as an example, we divide at the level of rather than , i.e., once the is assigned to the training set, the feature vectors belonging to can only appear in the training set.
Ideally, the trajectory
and the static feature sample
are one-to-one correspondence. Due to the processing of removing outliers from static data in
Section 3.1, there may be no
corresponding to
. Furthermore, the dynamic data used in this paper is only a part of the whole dataset, which may result in no
corresponding to
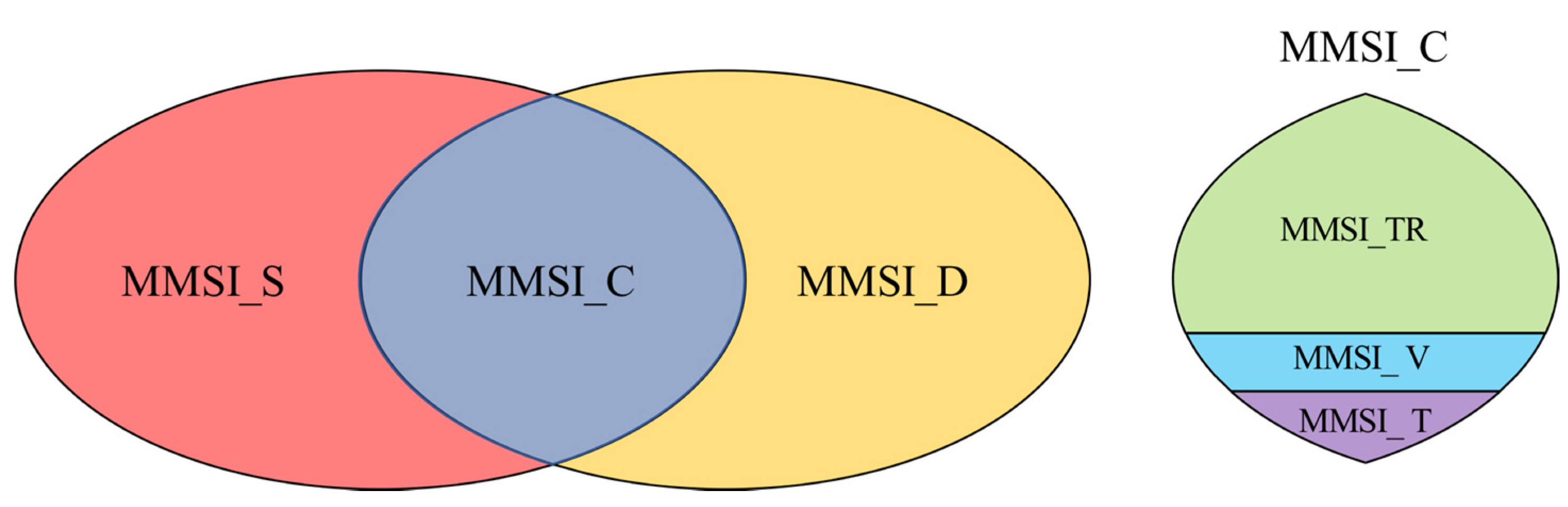
. To solve this problem, the MMSI in AIS data is divided into three parts, which are the MMSI that only appears in dynamic data (MMSI_D), the MMSI that only appears in static data (MMSI_S), and the MMSI which exists in both dynamic data and static data (MMSI_C), as shown in
Figure 9. The MMSI_C is then divided into the MMSI training set (MMSI_TR), MMSI validation set (MMSI_V), and MMSI testing set (MMSI_T) by the stratified sampling of different types of ships. The static data, which is the MMSI in MMSI_S and MMSI_TR, forms the training set of static feature samples. The dynamic data, which is the MMSI in MMSI_D and MMSI_TR, forms the training set of dynamic feature samples. The static data, which is the MMSI in MMSI_V and MMSI_T, forms the validation set and the testing set of static feature samples, respectively. The dynamic data, which is the MMSI in MMSI_V and MMSI_T, forms the validation set and the testing set of dynamic feature samples, respectively.
For a trajectory , if in MMSI_C, we can generate one , n , and n , which corresponds to one . The number of static samples and dynamic samples with the same MMSI is different. To solve this problem, we copy and n times in and , respectively.
4. Experimental Results and Analysis
The experiments of MFELCM are carried out on AIS data of four types of ships, i.e., passenger ships, tankers, fishing boats, and cargo ships, which are received by HY-1C/D and HY-2B/C. The experimental environment is Windows 10, Tensorflow 2.5.0, Keras 2.5.0, CPU is an AMD R7-5800H (3.2GHz), GPU is NVIDIA 3060 Laptop, and the memory is 32 G.
4.1. Overview of Experimental Data
For dynamic data, to reduce category imbalance and obtain effective ship dynamic features distribution, we select 300,000 pieces of messages from every four types of ships. Each ship should have more than 500 pieces of messages. Considering that the dynamic data should reflect ships’ motion features, the messages for which the SOG is lower than 2 knots are removed. The amount of dynamic data used in the experiments is shown in
Table 4, and
Figure 15 shows the data distribution.
Too short sub-trajectories are insufficient to reflect the short-term motion state of the ships. When constructing the dynamic feature datasets (i.e.,
,
, and
), the sub-trajectories with less than 10 messages are ignored. The dynamic data used for experiments are shown in
Table 5, and the data distribution is shown in
Figure 16.
For static data, all static data of the four types of ships are extracted from the database.
Table 6 shows the amount of data processed according to the method in
Section 3.1. The number of static data messages is greater than the number of ships corresponding to the static data because the features in static messages may change sometimes (e.g., draught and position reference point), and there exists fraudulent use of MMSI.
There are 2066 MMSI in MMSI_C (see
Figure 9), and the dynamic and the static datasets are split according to the methods in
Section 3.3. It should be noted that if one MMSI in MMSI_C corresponds to several
, those
should be replaced by their average before the datasets are split.
4.2. Base Classifiers and MFELCM
Table 7 shows the evaluation of the base classifiers and MFELCM on the testing set, in which class 0 to class 3 represent passenger ships, tankers, fishing boats, and cargo ships, respectively.
F1 score is calculated by Equation (17). , and are the number of true positive, false positive, and false-negative samples of type i ships, respectively. and are the accuracy and the recall of the model in classifying class i samples, respectively. The F1 score of a model is the weighted average of F1 scores for each type of ship, and the weight is the proportion of class i samples in the total number of samples. In addition, to reduce the effect of sample imbalance, the loss of samples is weighted during the training process, and the weight of the class i samples is set as .
4.2.1. Random Forest1 Experimental Results
The optimal hyper-parameters of the Random Forest1 are determined by random search, as shown in
Table 8.
Figure 17 is the confusion matrixes of the classifier on the testing set. The model tends to confuse passenger ships with fishing boats, and confuse tankers with cargo ships.
To explain the confusion matrixes, we use t-SNE [
32] to visualize the static features. t-SNE is a method of data visualization which can map data from high-dimensional space to low-dimensional space. If two samples are similar in high-dimensional space, the distance between their maps in low-dimensional space will be close.
Figure 18 shows the visual results of static features. There are partial overlaps between the reduced dimensional distributions of passenger ships and fishing vessels, as well as that of tankers and cargo ships, which implies that the static information of the misclassified ships is similar.
Figure 19 shows the importance of the static information features. It can be seen that the ship’s dimensional characteristics, such as A, length, and length-width ratio, can better describe the ships’ features than draught. In addition, although the features C and D contribute little to the classifier, these two parameters have been reflected in the length-width ratio, girth, area, and width, which proves that the static features constructed in this paper are effective in the ship classification task.
4.2.2. 1D-CNN Experimental Results
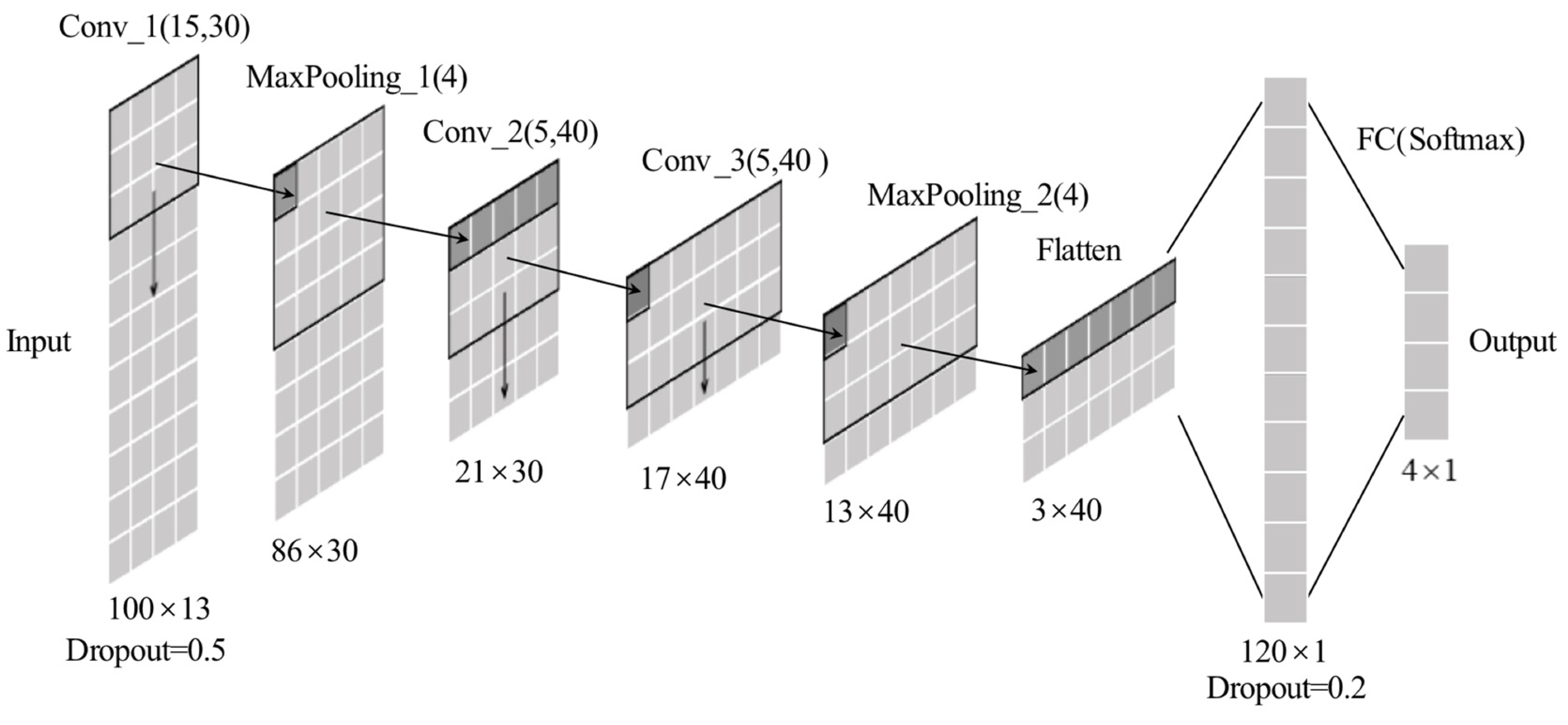
The number and the width of the convolution kernels in the first convolution layer (Conv_1) in 1D-CNN are optimized using grid search, as shown in
Table 9. The model used an Adam optimizer with a learning rate of 1 × 10
−3, a batch size of 2500, and the cross-entropy loss function.
Figure 10 shows the structure of 1D-CNN. 1D-CNN performs best when the parament of Conv_1 is Conv (30,15).
Figure 20 plots the learning curve of 1D-CNN.
Figure 21 shows the confusion matrixes of 1D-CNN on the testing set, where the classifier tends to confuse passenger ships with fishing boats, as well as tankers with cargo ships.
Figure 22a visualizes 30 convolutional kernels of Conv_1, each of which is a 15 × 13 matrix.
Figure 22b shows the matrix Q added to by the 30 convolution kernels in Conv_1.
Figure 22c shows the result of taking the absolute value after summing the matrix Q according to the columns. Convolution realizes the dimension reduction and feature extraction from the original data. In the first convolution layer, the value of the convolution kernel in different columns reflects the response intensity of the network to different characteristics. By summing Q and taking the absolute value, the importance of features for 1D-CNN can be inferred.
In
Figure 22c, the features from 0 to 12 correspond to the features of
in
Figure 8. As we can see from
Figure 22c, the four most important features to 1D-CNN are
,
,
, and
. The combination of
and
can reflect the directional information of ship motion. According to
Table A1,
is associated with ships motion state, and the combination of these four features (i.e.,
,
,
, and
) can reflect the information of ship’s speed, acceleration, and steering rate. In
Figure 4, it is obvious that there are some routes for cargo ships and tankers around the world, and the ship’s direction within the routes is usually fixed. However, the movements of fishing boats and passenger ships are more variable. Based on the above analysis, we speculate that the 1D-CNN network may learn the movement characteristics of different types of ships on the routes. In addition, the time feature contributes little to 1D-CNN, which is probably because most of the ships do not have such features, except for some offshore or inland river ships, which have regular activity periods in a day. The reason why the classifier confuses the samples (see
Figure 21) may be that the features of interest to 1D-CNN have some similarities between oil tankers and cargo ships, and between passenger ships and fishing boats.
4.2.3. Bi-GRU Experimental Results
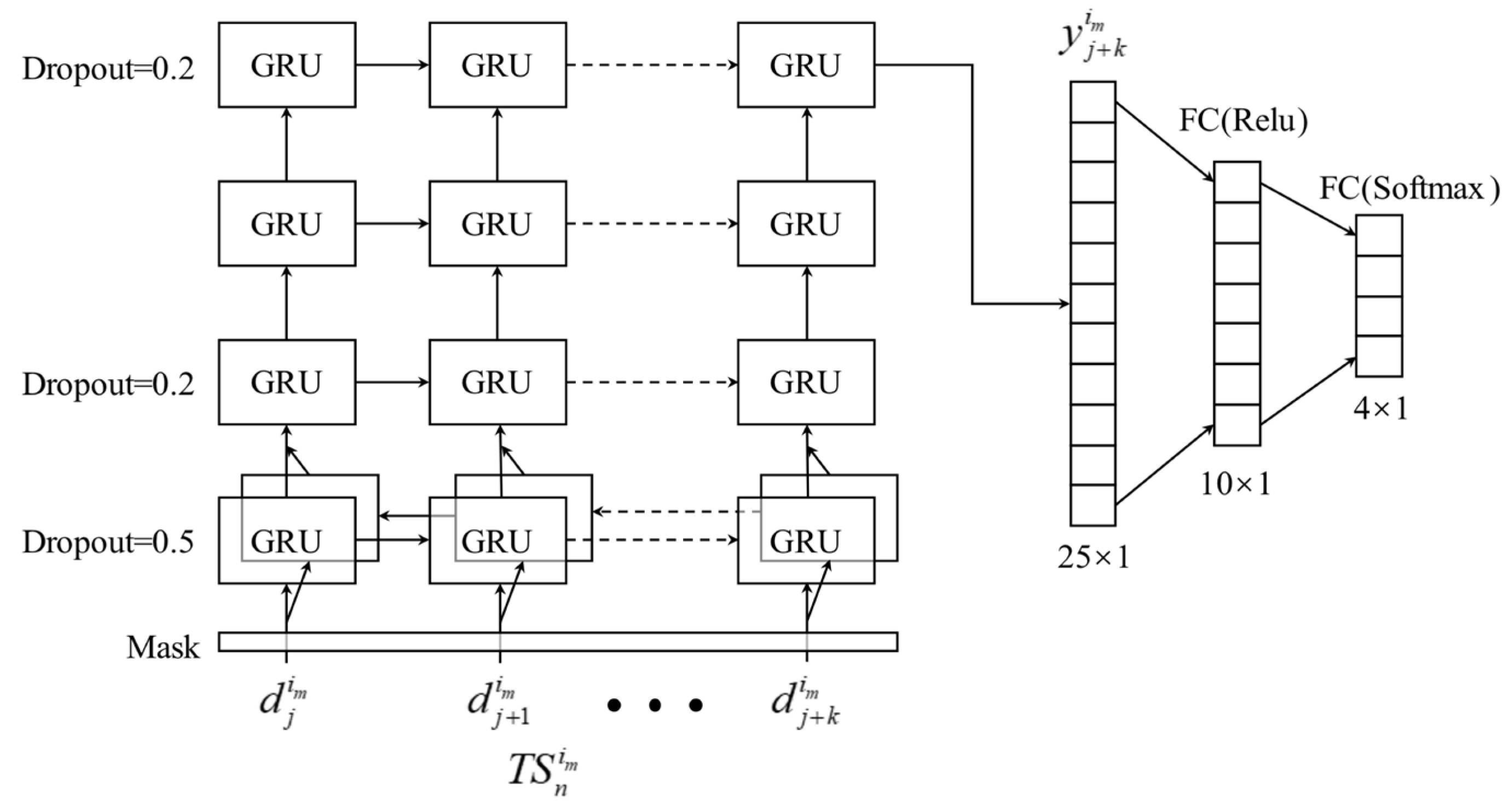
The number of cells in the hidden layer (NoC) of Bi-GRU is optimized using random search, as shown in
Table 10. The model structure is shown in
Figure 12. The model used an Adam optimizer with a learning rate of 1e-3, a batch size of 1500, and the cross-entropy loss function. In
Figure 12, as we prefer to choose the model with better performance on ship classification, the NoC of Bi-GRU is set to 35.
Figure 23 plots the learning curve of Bi-GRU.
Figure 24 shows the confusion matrixes of Bi-GRU on the testing set. In
Figure 24a, part of the sub-trajectories of passenger ships are misclassified into three other categories, and there is confusion between tankers and cargo ships, and some sub-trajectories of fishing boats are misclassified into cargo ships. In
Figure 24b, the classifier confuses passenger ships with fishing boats, as well as tankers with cargo ships, and some fishing boats are mislabeled as cargo ships.
4.2.4. XGBoost Experimental Results
The maximum depth of trees in XGBoost is 20 and the learning rate is 0.03.
The python toolkit named tsfresh can automatically generate a large number of features from time series, but it requires a lot of computing resources. In addition, many features are useless for classification, and thus it is necessary to filter the features outputted by tsfresh, which is done as follows.
Step 1. Extract features without filtering using tsfresh on a small dataset M and create the time-series dataset of M (denoted as ), and then use to train an XGBoost (denoted as XGBoost1).
Step 2. Use XGBoost1 to output the top n important features on dataset M.
Step 3. Use tsfresh to extract the n features obtained in Step 2 on the dynamic dataset (
Table 5), and create the time-series dataset (denoted as
), then use
to train another XGBoost (denoted as XGBoost2).
Step 4. If n is not zero, return to Step 2 and decrease n with a certain interval.
Step 5. When n can no longer decrease, choose the XGBoost2 with the best performance obtained in Step 3. The features used by this model are the most important feature that is generated by tsfresh.
We select 50,000 dynamic messages from the four types of ships, and each ship should have more than 500 pieces of messages. After removing those sub-trajectories which contain less than 10 pieces of messages, there are 106,169 pieces of dynamic messages left, which is the dataset
M.
Table 11 illustrates the amount of
M, whose distribution is shown in
Figure 25. The XGBoost1 is trained on
with 3765 features extracted from M by tsfresh.
Figure 26 shows the importance of the features outputted by XGBoost1.
Table 12 shows the performance of XGBoost2 which trains on
with a different number of features. The XGBoost2 performs best when the top 40 important features are considered. The features’ names and weights are shown in
Table A2, and the detailed definition of these features can be obtained from [
33].
When using 40 features to complete the classification of ships, the learning curve of XGBoost2 and the confusion matrix on the testing set are as shown in
Figure 27. In
Figure 27b, some sub-trajectories of passenger ships are misclassified into the other three categories. The classifier tends to confuse tankers with cargo ships, and tankers are more likely to be mislabeled as cargo ships. In
Figure 27c, the confusion of tankers and cargo ships remains significant.
Figure 28 shows the importance score of these 40 features, whose names and values of importance score are shown in
Table A2. The features are mostly related to the location, speed, heading, and steering rate information of the ships, and we infer that the XGBoost2 tends to learn ships’ spatial distribution.
In addition, we carry out an experiment to illustrate the necessity of splitting the dataset by MMSI. The XGBoost trained on the time-series feature dataset
(
is split by
instead of
) is denoted as XGBoost3. Under the same parameters with XGBoost2, the learning curve and the confusion matrixes of XGBoost3 are shown in
Figure 29. The F1 score and total accuracy of XGBoost3 evaluated on
are 0.8180 and 0.8186, respectively, and those evaluated on ships are 0.7996 and 0.7994. It seems that the XGBoost3 performs better than the XGBoost2, but this is because the samples (
) from the same ship (
) appear in the training set and the testing/validation set at the same time. This data leakage leads to the performance of XGBoost3 being overestimated.
4.2.5. MFELCM Experimental Results
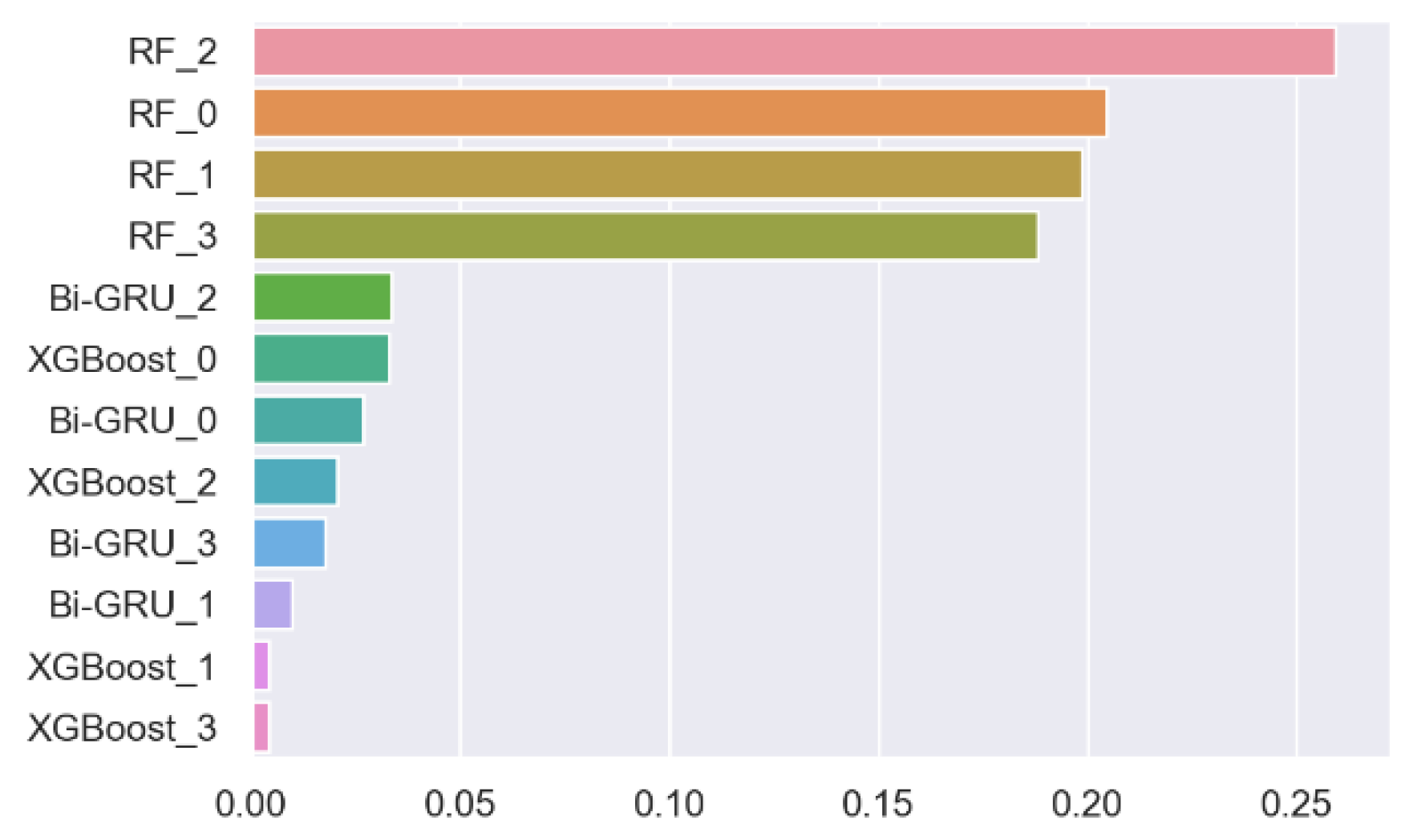
The Random Forest (denoted as Random Forest2) is used to integrate four base classifiers, and MFELCM is the combination of four base classifiers and Random Forest2. The weight of class
i of samples (i.e., samples in
Figure 14) is the ratio of the total number of samples to the number of class
i samples. The best paraments of Random Forest2 are shown in
Table 13, and are obtained by random search. The weights of Random Forest2 to each base classifier are shown in
Figure 30.
Figure 31 shows the confusion matrixes of Random Forest2 on the validation set (which is also the confusion matrixes of MFELCM). Comparing the performance of MFELCM with the base classifiers in
Table 5, MFELCM has higher total accuracy and F1 score than those of the base classifiers. Specifically, MFELCM reduces the confusion between passenger ships and fishing boats, as well as that between tankers and cargo ships. When evaluating the performance of MFELCM by samples, MFELCM improves the total accuracy by 1.57% and the F1 score by 1.63%, which is equivalent to a 24.61% reduction in misclassification over the best base classifiers (Random Forest1). When evaluating the performance of MFELCM by ships, MFELCM improves the total accuracy by 3.14% and F1 score by 3%, which is equivalent to a 24.08% reduction in misclassification over the best base classifiers (Random Forest1). Different classifiers focus on different ship features and they have different classification tendencies. By integrating multiple features, MFELCM reduces the bias effectively. Furthermore, the classification results of ships can be refreshed by updating the dynamic information regularly (e.g., using satellites to transmit and update data regularly), which enables near real-time online classification.
4.3. The Degraded MFELCM
In practice, space-based AIS data may not provide the features required by the four base classifiers at the same time. The classification effect of degraded MFELCM with one base classifier absence is discussed below.
When the static features are missing, the degraded MFELCM (denoted as MFELCM1) integrates 1D-CNN, Bi-GRU, and XGBoost. The paraments of Random Forest2 in MFELCM1 are shown in
Table 14. The weights of Random Forest2 to each base classifier are shown in
Figure 32.
Figure 33 shows the confusion matrixes of MFELCM1 on the testing set.
Table 15 compares the performance of MFELCM1 with the base classifiers, and MFELCM1 is better than the base classifiers in terms of the total accuracy and F1 score. In addition, MFELCM1 can either refresh the classification results by updating the inputs or can switch to MFELCM when receiving static features.
In the case of missing dynamic feature distribution due to insufficient dynamic data, the degraded MFELCM (noted as MFELCM2) integrates Random Forest1, Bi-GRU, and XGBoost. The paraments of Random Forest2 in MFELCM2 are shown in
Table 16. The weights of Random Forest2 to each base classifier are shown in
Figure 34.
Figure 35 shows the confusion matrixes of MFELCM2 on the testing set.
Table 17 compares the performance of MFELCM2 with the base classifiers. MFELCM2 outperforms the base classifiers in terms of the total accuracy and
F1 score. In addition, MFELCM2 can either refresh the classification prediction by updating the inputs or can switch to MFELCM after receiving a sufficient amount of dynamic data.
5. Conclusions and Future Work
In this paper, we propose a ship classification method named MFELCM which is suitable for space-based AIS data worldwide. MFELCM integrates four base classifiers, i.e., Radom Forest, 1D-CNN, Bi-GRU, and XGBoost. The dynamic and static data are firstly preprocessed and four datasets are constructed (i.e., the static feature dataset , the dynamic feature distribution dataset , the time-series dataset , and the time-series feature dataset ), after which the datasets are split by MMSI to avoid the data leakage problem. Finally, the base classifiers are integrated by another Random Forest. Experiments show that MFELCM performs better than the four base classifiers, and MFELCM can effectively integrate the static and dynamic information of ships. Moreover, in the case of one base classifier being missing, the degraded MFELCM—which integrates the remaining base classifiers—still outperforms the base classifiers. As MFELCM integrates multiple features, it can achieve near real-time online classification, which can be applied to ship behavior anomaly detection as well as enhancing the supervision of maritime activities.
The methods used to generate the dynamic features are an important factor for classification performance. In addition, the parameters of the classifiers are obtained by experiments in this paper. In the future, to further improve the performance of MFELCM, we plan to refine the methods of dynamic features generation as well as develop an automatic classifier parameter optimization method.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


































