An Integrated Algorithm for Intersection Queue Length Estimation Based on IoT in a Mixed Traffic Scenario


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Featured Application
Abstract
1. Introduction
- (1)
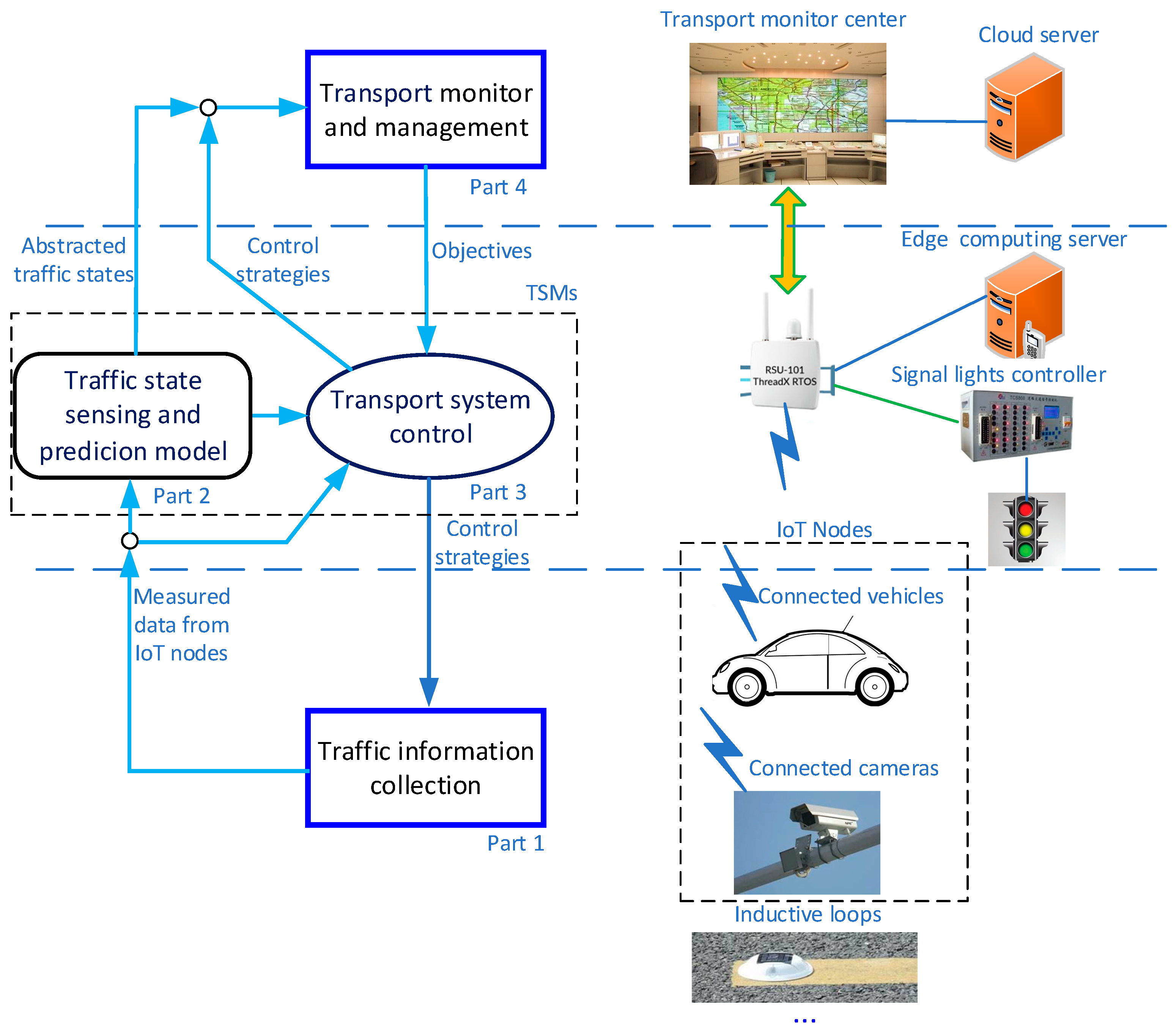
- A paradigm of service computing about traffic application in IoT-based scenario is firstly proposed. A case for queuing length estimation at traffic intersections is studied.
- (2)
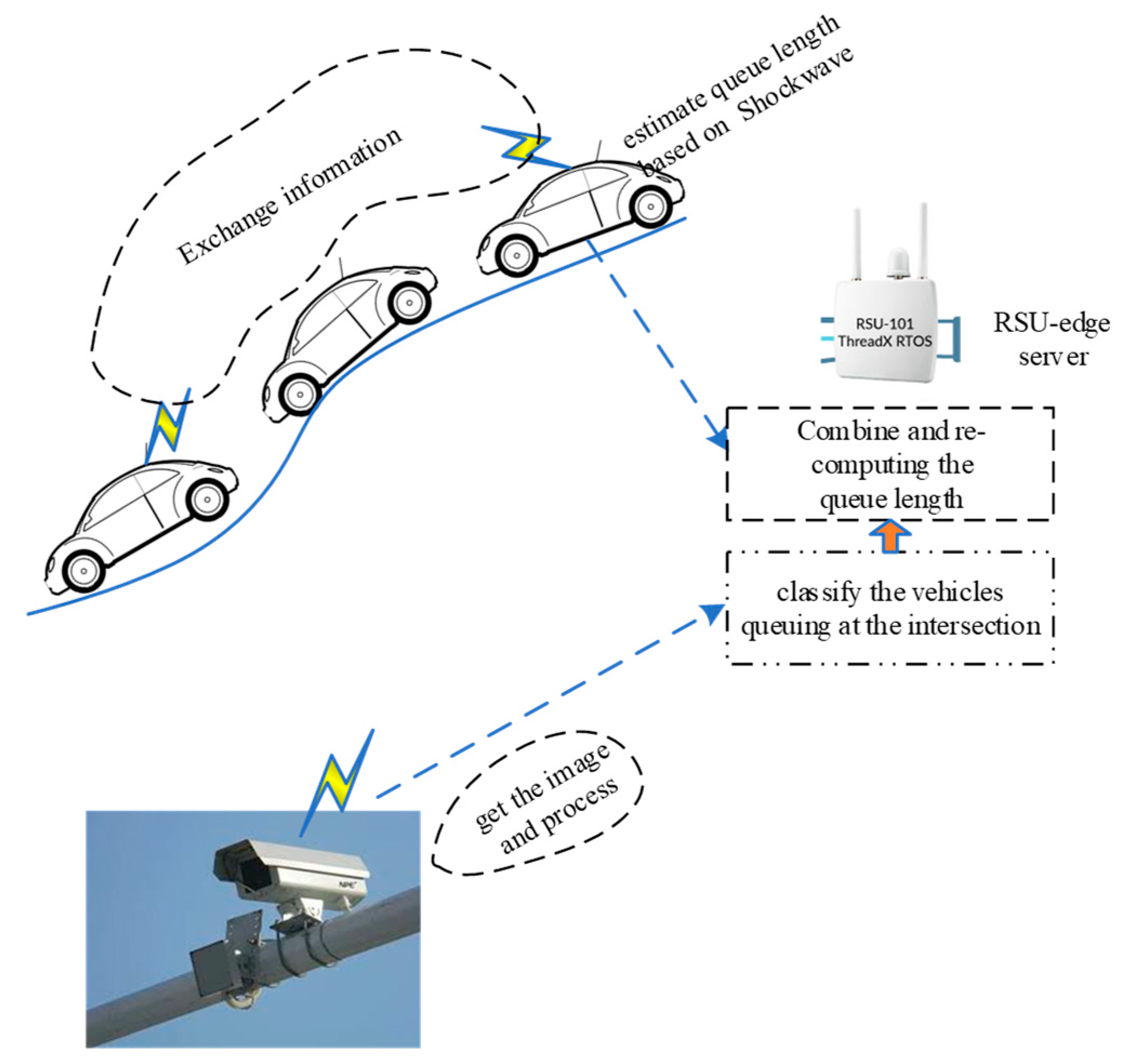
- The connected cars provide computing service based on the shockwave model with considering the upstream intersection flow change in a cooperative manner.
- (3)
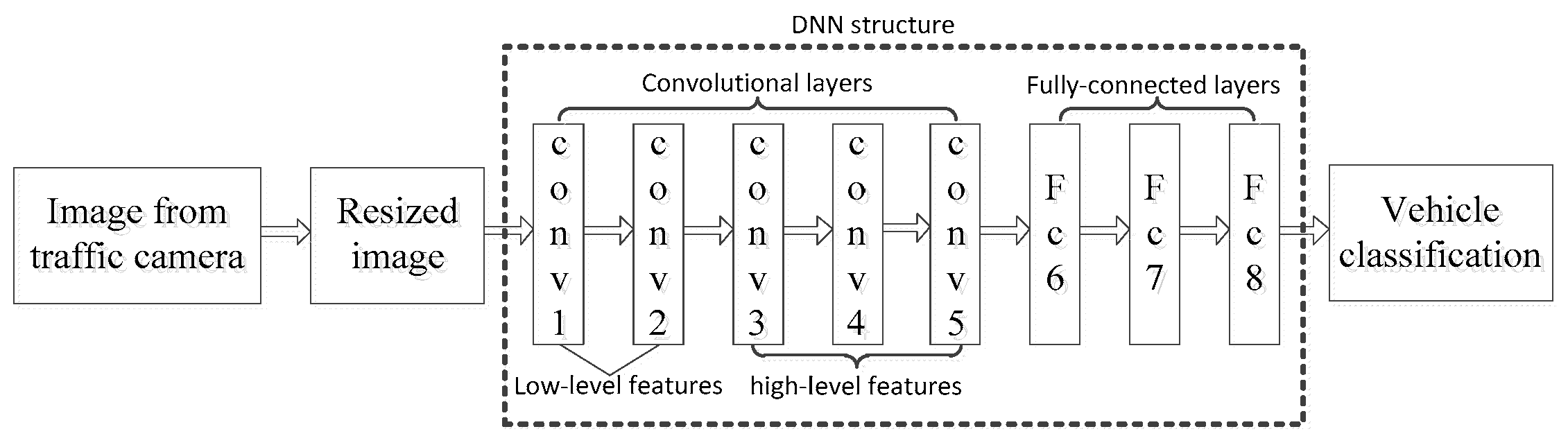
- A queue length estimation is realized with the aid of connected traffic cameras and edge server. A deep neural network is utilized to classify the queuing cars in the intersection.
2. Materials and Methods
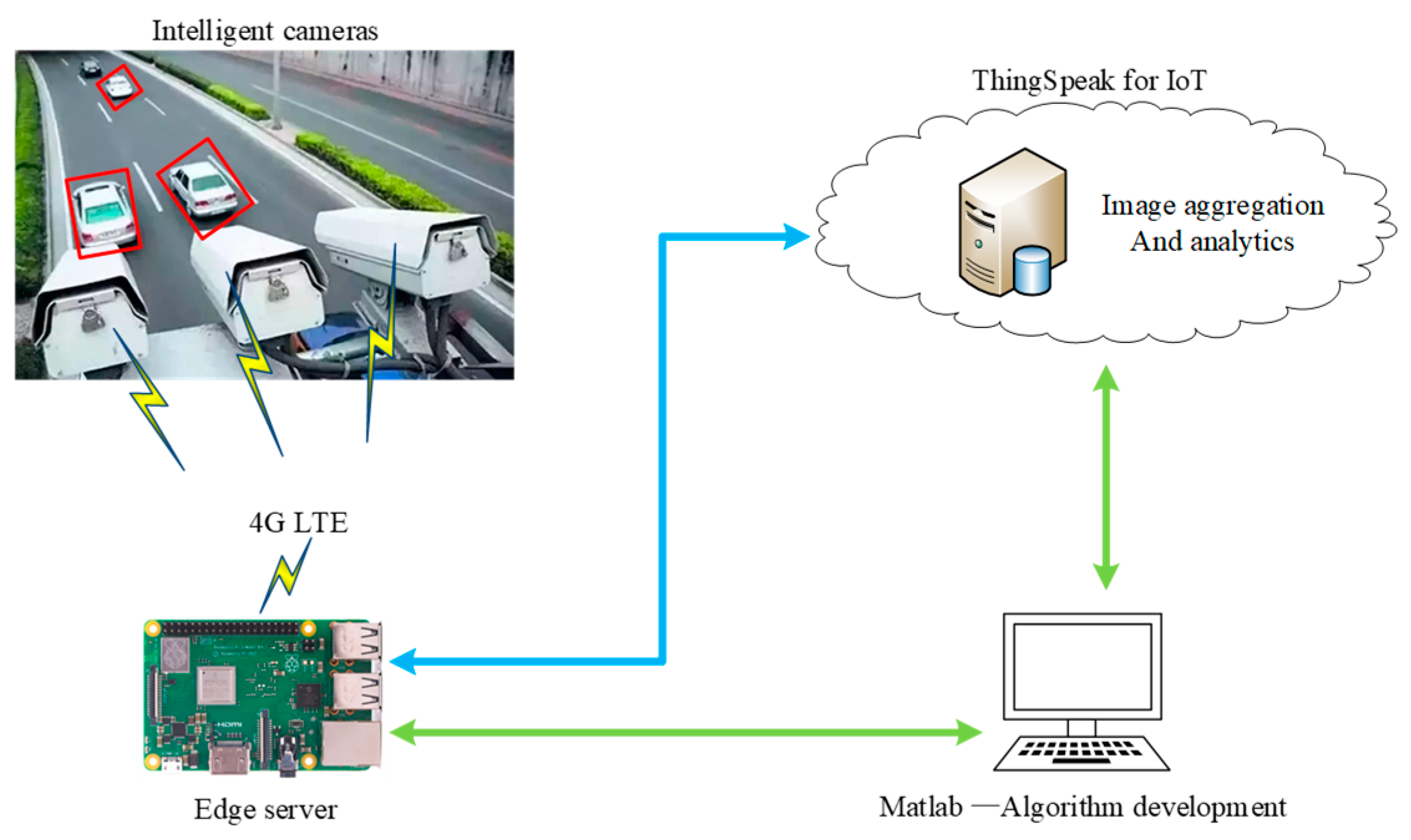
2.1. Architecture of Mobile Service Computing for Traffic Static Estimate in an IoT Scenario
2.2. Queue Length Estimation Algorithm Design
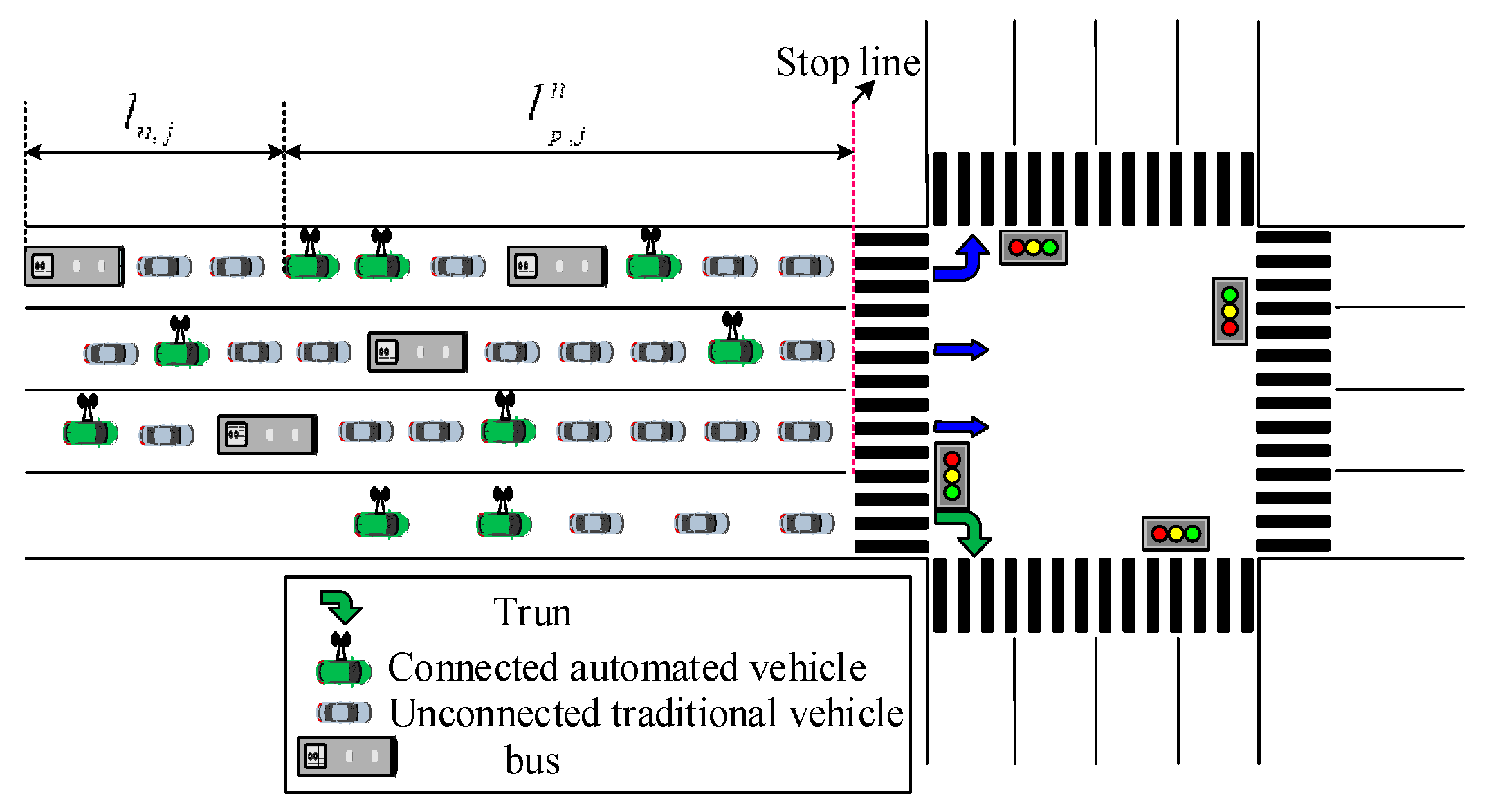
2.2.1. Basic Conditions
- (1)
- GPS and V2X modules are set on the automated vehicles, which can get and deliver the position and speed of vehicles. Nowadays, these modules are usually integrated in the automotive IoT module, such as modules supplied by Quectel corporation in China;
- (2)
- The edge computing server in the roadside units can accurately obtain the connected vehicle’s ID and location;
- (3)
- There is at least one connected vehicle in each entrance lane for a sample cycle;
- (4)
- The length of the vehicles is not assumed to be identical, which is an enormous challenge to V2X- based traffic states sensing in a mixed traffic scenario.
2.2.2. Shockwave Estimation Model Based on V2X
2.2.3. Deep Learning to Compute the Queue Length Based on Traffic Image
2.2.4. Weight Calculation of Combined Model
| Algorithm 1 Queue Length Estimate Algorithm at Intersections |
| Input:l, the predicted queue length based on shockwave; l2, the predicted queue length from DNN based on image, defined by (7); α, the weight of shockwave model, defined by (8); vn,j, velocity of shockwave for the n-th connected vehilce in lane j; n is the number of connected vehicles in the queue; j is the number of lanes at the intersection; , the queue length before the connected vehicle numbered i in the lane j; tf, the closing time of red light cycle; tr, the beginning time of a red light cycle; ti,j, the stop time of the connected vehicle numbered i in the lane j; k, the number of a connected vehicle that crossing the inductive loop at the upstream; kc, the total number of vehicle types; Lic, the length of type ic of vehicle; Qic, the number of type ic vehicle in the image; L0, the space between adjacent vehicles; mv, the sum of all vehicles in the traffic image; m, the number of lanes at the intersection. |
| Output: |
| 1: , queue length estimated by combined computing; |
| 2: Algorithm begin: |
| 3: Computing the queue length to estimate l based on shockwave, |
| 4: where |
| 5: |
| 6: vnj can be calculated as follows, |
| 7: if n == 1 then |
| 8: |
| 9: else |
| 10: |
| 11: end if |
| 12: Deep learning to compute the queue length based on traffic image, |
| 13: Get images from connected camera and resize and classify the vehicles to predefine types by DNN constructed like Figure 4, |
| 14: then compute the queue length by, |
| 15: |
| 16: compute the combined estimate queue length, |
| 17: |
| 18: where |
| 19: return |
| 20: Algorithm end |
3. Results
3.1. Shockwave-Based Queue Length Estimation Model Validation
3.2. Model Validation Based on DNN
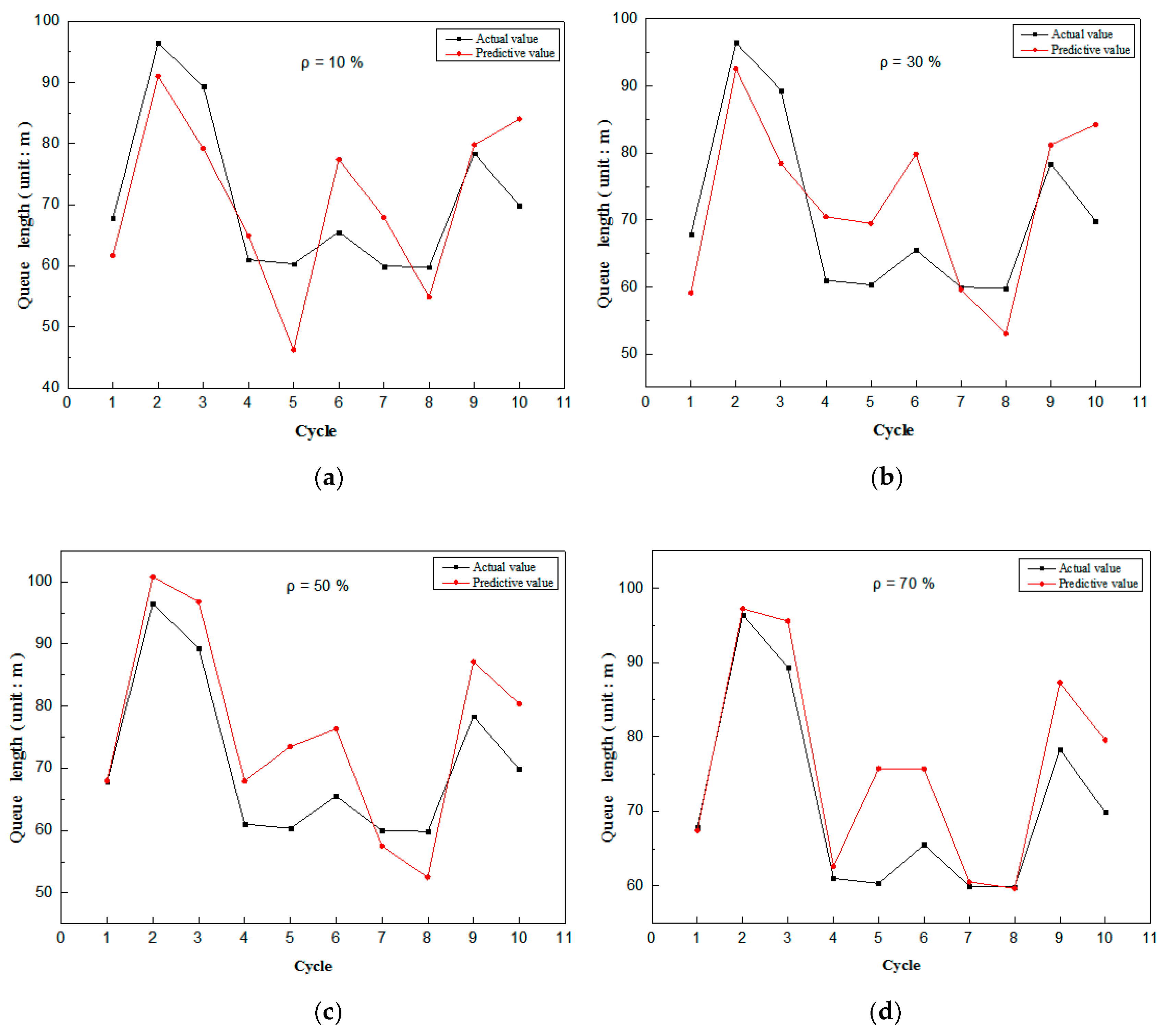
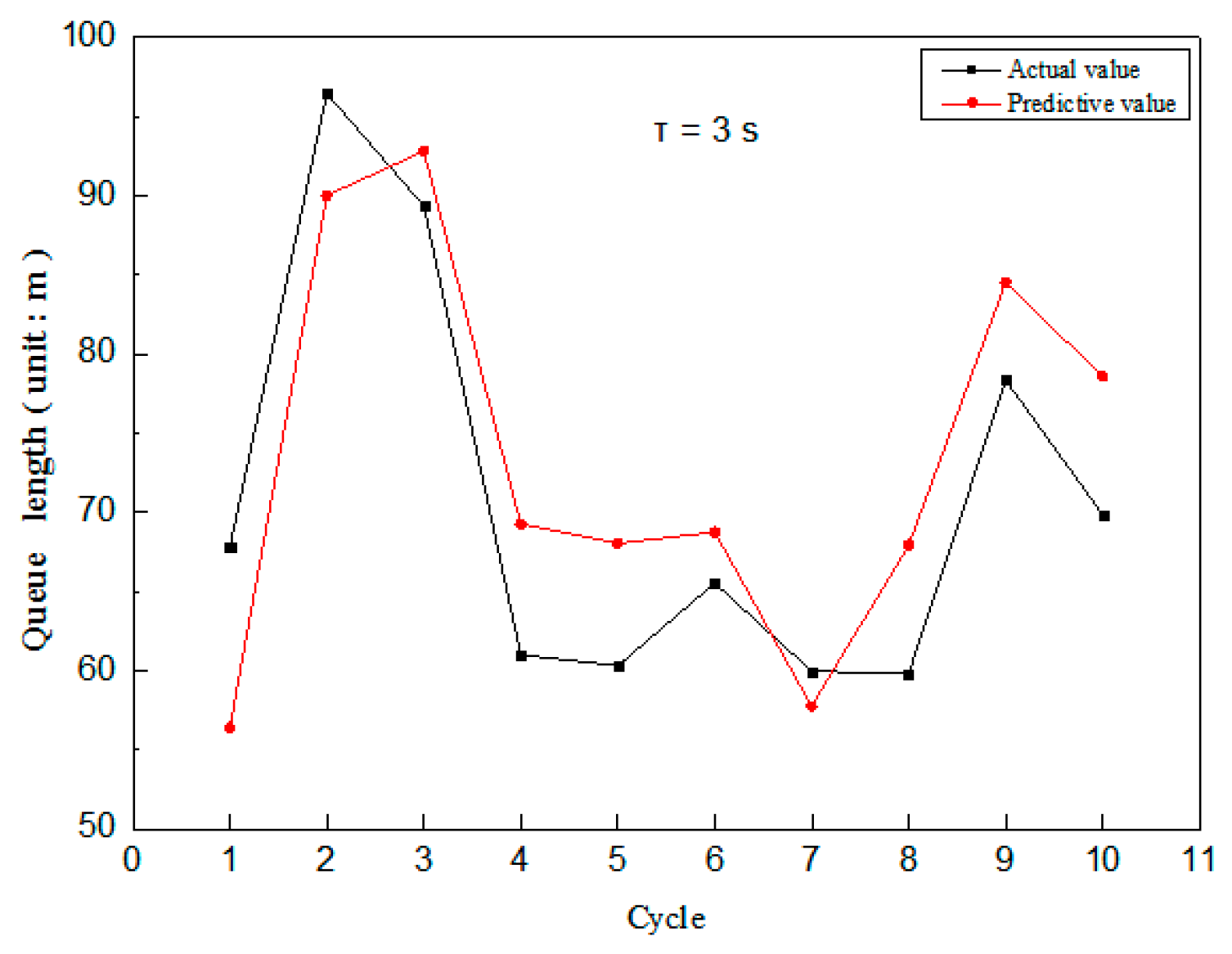
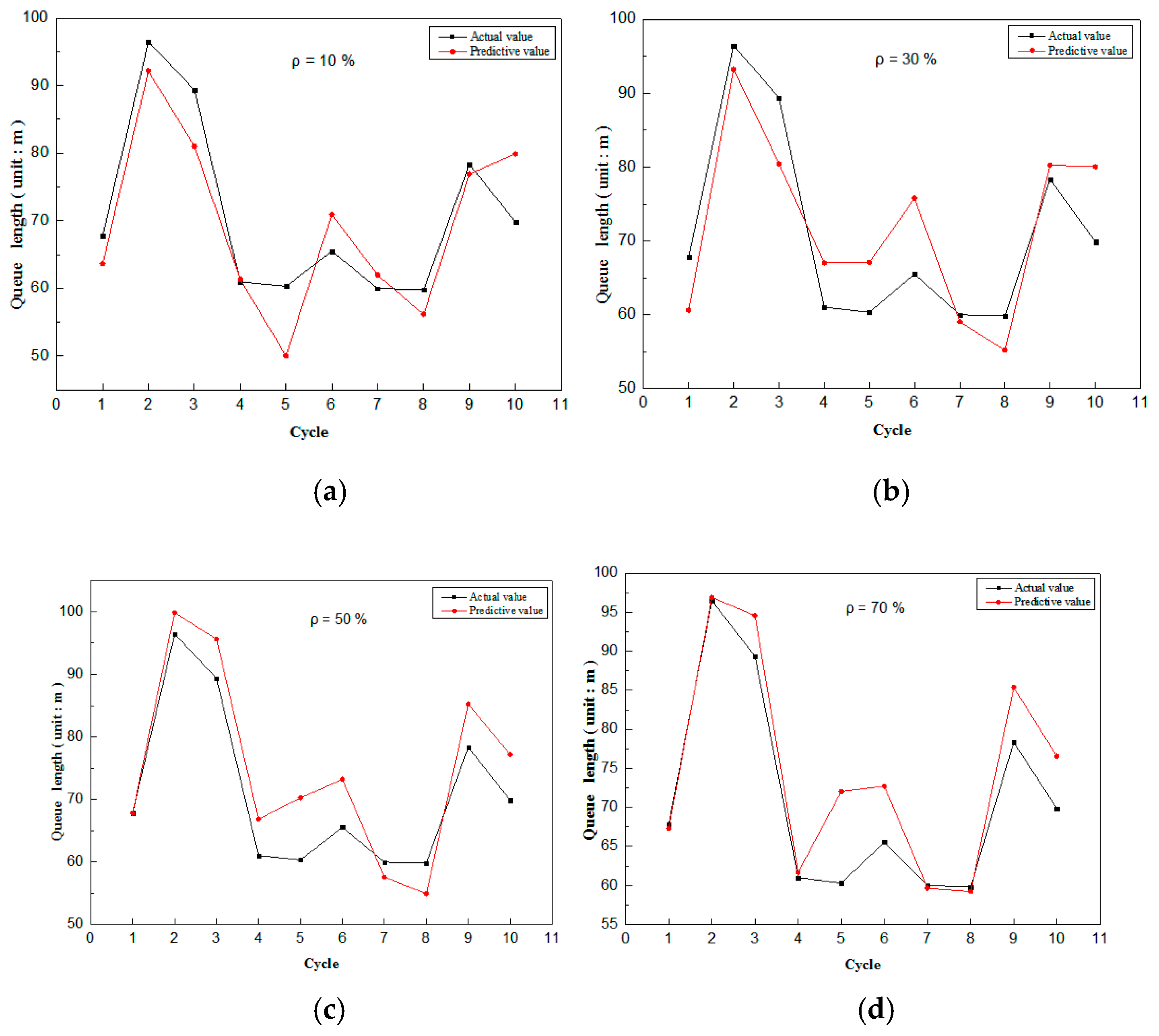
3.3. Test of Combined Prediction Model
4. Conclusions
- (1)
- The delay of information transmission and the loss of data between the on-board unit and the roadside unit are not considered in this paper. When this situation exists, errors in the prediction results are possible, which could do some further research.
- (2)
- Additional research is needed on the effect factors of weight α, connected vehicles penetration rate, and vehicle type difference rate.
- (3)
- The proposed methodology framework will be attempted to apply in computing delay at unsignalized intersections and even roundabouts with necessary modifications.
- (4)
- The proposed algorithm may be validated by probe vehicles or float car data.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wu, M.; Xiong, N.N.; Tan, L. An intelligent adaptive algorithm for environment parameter estimation in smart cities. IEEE Access 2018, 6, 23325–23337. [Google Scholar] [CrossRef]
- Xing, Y.; Lv, C.; Wang, H.; Ai, Y.; Cao, D.; Velenis, E.; Wang, F.Y. Driver lane change intention inference for intelligent vehicles: Framework, survey, and challenges. IEEE Trans. Veh. Technol. 2019, 68, 4377–4390. [Google Scholar] [CrossRef] [Green Version]
- Florin, R.; Olariu, S. A survey of vehicular communications for traffic signal optimization. Veh. Commun. 2015, 2, 70–79. [Google Scholar] [CrossRef]
- Li, W.; Xu, H.; Li, H.; Yang, Y.; Sharma, P.K.; Wang, J.; Singh, S. Complexity and algorithms for superposed data uploading problem in networks with smart devices. IEEE Internet Things J. 2019. [Google Scholar] [CrossRef]
- Lee, J.; Park, B. Development and evaluation of a cooperative vehicle intersection control algorithm under the connected vehicles environment. IEEE Trans. Intell. Transp. Syst. 2012, 13, 81–90. [Google Scholar] [CrossRef]
- Tiaprasert, K.; Zhang, Y.; Wang, X.B. Queue length estimation using connected vehicle technology for adaptive signal control. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2129–2140. [Google Scholar] [CrossRef]
- Du, R.; Qiu, G.; Gao, K.; Hu, L.; Liu, L. Abnormal road surface recognition based on smartphone acceleration sensor. Sensors 2020, 20, 451. [Google Scholar] [CrossRef] [Green Version]
- Lu, N.; Cheng, N.; Zhang, N.; Shen, X.; Mark, J.W. Connected vehicles: Solutions and challenges. IEEE Internet Things J. 2014, 1, 289–299. [Google Scholar] [CrossRef]
- Chen, Z.; Luo, Z.; Duan, X.; Zhang, L. Terminal handover in software-defined WLANs. EURASIP J. Wirel. Commun. Netw. 2020. [Google Scholar] [CrossRef] [Green Version]
- Siegel, J.E.; Erb, D.C.; Sarma, S.E. A survey of the connected vehicle landscape—Architectures, enabling technologies, applications, and development areas. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2391–2406. [Google Scholar] [CrossRef] [Green Version]
- Deng, S.; Huang, L.; Wu, H.; Tan, W.; Taheri, J.; Zomaya, A.Y.; Wu, Z. Toward mobile service computing: Opportunities and challenges. IEEE Cloud Comput. 2016, 3, 32–41. [Google Scholar] [CrossRef]
- Hu, L.; Ou, J.; Huang, J.; Chen, Y.; Cao, D. A review of research on traffic conflicts based on intelligent vehicles. IEEE Access 2020, 8, 24471–24483. [Google Scholar] [CrossRef]
- Ma, C.; Hao, W.; He, R.; Jia, X.; Pan, F.; Fan, J.; Xiong, R. Distribution path robust optimization of electric vehicle with multiple distribution centers. PLoS ONE 2018, 13, e0193789. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Comert, G.; Cetin, M. Queue length estimation from probe vehicle location and the impacts of sample size. Eur. J. Oper. Res. 2009, 197, 196–202. [Google Scholar] [CrossRef]
- Cheng, C.; Du, Y.; Sun, L.; Ji, Y. Review on theoretical delay estimation model for signalized intersections. Transp. Rev. 2016, 36, 479–499. [Google Scholar] [CrossRef]
- Dion, F.; Rakha, H.; Kang, Y.S. Comparison of delay estimates at under-saturated and over-saturated pre-timed signalized intersections. Transp. Res. Part B Methodol. 2004, 38, 99–122. [Google Scholar] [CrossRef]
- Hasiloglu, A.; Gokdag, M.; Karsli, N. Comparison an artificial intelligence-based model and other models: Signalized intersection delay estimates. Artif. İntell. 2014, 4, 220–228. [Google Scholar]
- Ahn, S.; Choi, J. Utilization of V2X Communications for Vehicle Queue Length Estimation. In Proceedings of the 2018 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 17–19 October 2018. [Google Scholar] [CrossRef]
- Xu, H.; Ding, J.; Zhang, Y. Queue Length Estimation at Isolated Intersections Based on Intelligent Vehicle Infrastructure Cooperation Systems. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017. [Google Scholar] [CrossRef]
- Zheng, J.; Liu, H.X. Estimating traffic volumes for signalized intersections using connected vehicle data. Transp. Res. Part C 2017, 79, 347–362. [Google Scholar] [CrossRef] [Green Version]
- Tišljaric, L.; Erdelic, T.; Caric, T. Analysis of Intersection Queue Lengths and Level of Service using GPS data. In Proceedings of the International Symposium ELMAR, Zadar, Croatia, 16–19 September 2018. [Google Scholar] [CrossRef]
- Guler, S.I.; Menendez, M.; Meier, L. Using connected vehicle technology to improve the efficiency of intersections. Transp. Res. Part C 2014, 46, 121–131. [Google Scholar] [CrossRef]
- Yang, K.; Menendez, M. Queue estimation in a connected vehicle environment: A convex approach. IEEE Trans. Intell. Transp. Syst. 2018, 4, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Argote-Cabañero, J.; Christofa, E.; Skabardonis, A. Connected vehicle penetration rate for estimation of arterial measures of effectiveness. Transp. Res. Part C 2015, 60, 298–312. [Google Scholar] [CrossRef]
- Shirazi, M.S.; Morris, B. Vision-based vehicle queue analysis at junctions. In Proceedings of the 2015 12th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Karlsruhe, Germany, 25–28 August 2015. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436. [Google Scholar] [CrossRef] [PubMed]
- Shirazi, M.S.; Morris, B.T. Looking at intersections: A survey of intersection monitoring, behavior and safety analysis of recent studies. IEEE Trans. Intell. Transp. Syst. 2017, 18, 4–24. [Google Scholar] [CrossRef]
- Shirazi, M.S.; Morris, B. Traffic flow classification using traffic cameras. In Advances in Visual Computing; Springer: Cham, Switzerland, 2018; pp. 758–767. [Google Scholar]
- Jiang, F.; Wang, K.; Dong, L.; Pan, C.; Xu, W.; Yang, K. Deep Learning Based Joint Resource Scheduling Algorithms for Hybrid MEC Networks. IEEE Internet Things J. 2019. [Google Scholar] [CrossRef] [Green Version]
- Guerrero-Ibanez, J.A.; Zeadally, S.; Contreras-Castillo, J. Integration challenges of intelligent transportation systems with connected vehicle, cloud computing, and internet of things technologies. IEEE Wirel. Commun. 2015, 22, 122–128. [Google Scholar] [CrossRef]
- Li, Z.J.; Chen, C.; Wang, K. Cloud computing for agent-based urban transportation systems. IEEE Intell. Syst. 2011, 26, 73–79. [Google Scholar] [CrossRef]
- Abbas, N.; Zhang, Y.; Taherkordi, A.; Skeie, T. Mobile edge computing: A survey. IEEE Internet Things J. 2018, 5, 450–465. [Google Scholar] [CrossRef] [Green Version]
- Ang, L.-M.; Seng, K.P.; Ijemaru, G.K.; Zungeru, A.M. Deployment of IoV for Smart Cities: Applications, Architecture, and Challenges. IEEE Access 2019, 7, 6473–6492. [Google Scholar] [CrossRef]
- Dhall, R.; Solanki, V. An IoT based predictive connected car maintenance. Int. J. Interact. Multimedia Artif. Intell. 2017, 4, 16. [Google Scholar] [CrossRef] [Green Version]
- Lin, T.; Rivano, H.; Le Mouël, F. A survey of smart parking solutions. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3229–3253. [Google Scholar] [CrossRef] [Green Version]
- Ji, Z.; Ganchev, I.; O’Droma, M.; Zhao, L.; Zhang, X. A cloud-based car parking middleware for IoT-based smart cities: Design and implementation. Sensors 2014, 14, 22372–22393. [Google Scholar] [CrossRef] [PubMed]
- Dinh, T.; Kim, Y. A novel location-centric IoT-cloud based on-street car parking violation management system in smart cities. Sensors 2016, 16, 810. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.; Han, J.; Kim, S.-H.; Choi, J.; Yoon, D.; Jeon, M.; Yang, E.; Pham, N.; Woo, S.; Park, J.; et al. IsV2C: An integrated road traffic-network-cloud simulator for V2C connected car services. In Proceedings of the 2017 IEEE International Conference on Services Computing (SCC), Honolulu, HI, USA, 25–30 June 2017. [Google Scholar] [CrossRef]
- Datta, S.K.; Khan, M.I.; Codeca, L.; Denis, B.; Härri, J.; Bonnet, C. Iot and microservices based testbed for connected car services. In Proceedings of the 2018 IEEE 19th International Symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Chania, Greece, 12–15 June 2018. [Google Scholar] [CrossRef]
- Hu, Y.C.; Patel, M.; Sabella, D.; Sprecher, N.; Young, V. Mobile edge computing—A key technology towards 5G. ETSI White Paper 2015, 11, 1–16. [Google Scholar]
- Khan, S.M.; Dey, K.C.; Chowdhury, M. Real-time traffic state estimation with connected vehicles. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1687–1699. [Google Scholar] [CrossRef]
- Darwish, T.; Bakar, K.A. Traffic density estimation in vehicular ad hoc networks: A review. Ad Hoc Netw. 2015, 24, 337–351. [Google Scholar] [CrossRef]
- Gao, K.; Han, F.; Dong, P.; Xiong, N.; Du, R. Connected vehicle as a mobile sensor for real time queue length at signalized intersections. Sensors 2019, 19, 2059. [Google Scholar] [CrossRef] [Green Version]
- Croce, A.I.; Musolino, G.; Rindone, C.; Vitetta, A. Sustainable mobility and energy resources: A quantitative assessment of transport services with electrical vehicles. Renew. Sustain. Energy Rev. 2019, 113, 109236. [Google Scholar] [CrossRef]
- Alonso, B.; Ibeas, Á.; Musolino, G.; Rindone, C.; Vitetta, A. Effects of traffic control regulation on network macroscopic fundamental diagram: A statistical analysis of real data. Transp. Res. Part A Policy Pract. 2019, 126, 136–151. [Google Scholar] [CrossRef]
- Marcianò, F.A.; Musolino, G.; Vitetta, A. Signal setting optimization on urban road transport networks: The case of emergency evacuation. Saf. Sci. 2015, 72, 209–220. [Google Scholar] [CrossRef]
- Birgillito, G.; Rindone, C.; Vitetta, A. Passenger mobility in a discontinuous space: Modelling access/egress to maritime barrier in a case study. J. Adv. Transp. 2018, 2018, 1–13. [Google Scholar] [CrossRef]
- Filocamo, B.; Ruiz, J.A.; Sotelo, M.A. Efficient management of road intersections for automated vehicles—The FRFP system applied to the various types of intersections and roundabouts. Appl. Sci. 2020, 10, 316. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Nejati, H.; Do, T.-T.; Cheung, N.-M.; Cheah, L. Image-based vehicle analysis using deep neural network: A systematic study. In Proceedings of the 2016 IEEE International Conference on Digital Signal Processing (DSP), Beijing, China, 16–18 October 2016. [Google Scholar] [CrossRef] [Green Version]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Wong, W.; Shen, S.; Zhao, Y.; Liu, H.X. On the estimation of connected vehicle penetration rate based on single-source connected vehicle data. Transp. Res. Part B Methodol. 2019, 126, 169–191. [Google Scholar] [CrossRef]
- Handana, S.J.; Hussain, S.J. Smart surveillance system using thing speak and Raspberry Pi. Int. J. Adv. Res. Comput. Commun. Eng. 2015, 4, 214–218. [Google Scholar] [CrossRef]









© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, K.; Huang, S.; Han, F.; Li, S.; Wu, W.; Du, R. An Integrated Algorithm for Intersection Queue Length Estimation Based on IoT in a Mixed Traffic Scenario. Appl. Sci. 2020, 10, 2078. https://doi.org/10.3390/app10062078
Gao K, Huang S, Han F, Li S, Wu W, Du R. An Integrated Algorithm for Intersection Queue Length Estimation Based on IoT in a Mixed Traffic Scenario. Applied Sciences. 2020; 10(6):2078. https://doi.org/10.3390/app10062078
Chicago/Turabian StyleGao, Kai, Shuo Huang, Farong Han, Shuo Li, Wenguang Wu, and Ronghua Du. 2020. "An Integrated Algorithm for Intersection Queue Length Estimation Based on IoT in a Mixed Traffic Scenario" Applied Sciences 10, no. 6: 2078. https://doi.org/10.3390/app10062078