Aerodynamic Simulation of Helicopter Based on Polyhedron Nested Grid Technology

Abstract
:1. Introduction
2. CFD Simulation Method
2.1. Governing Equation and Solution Method
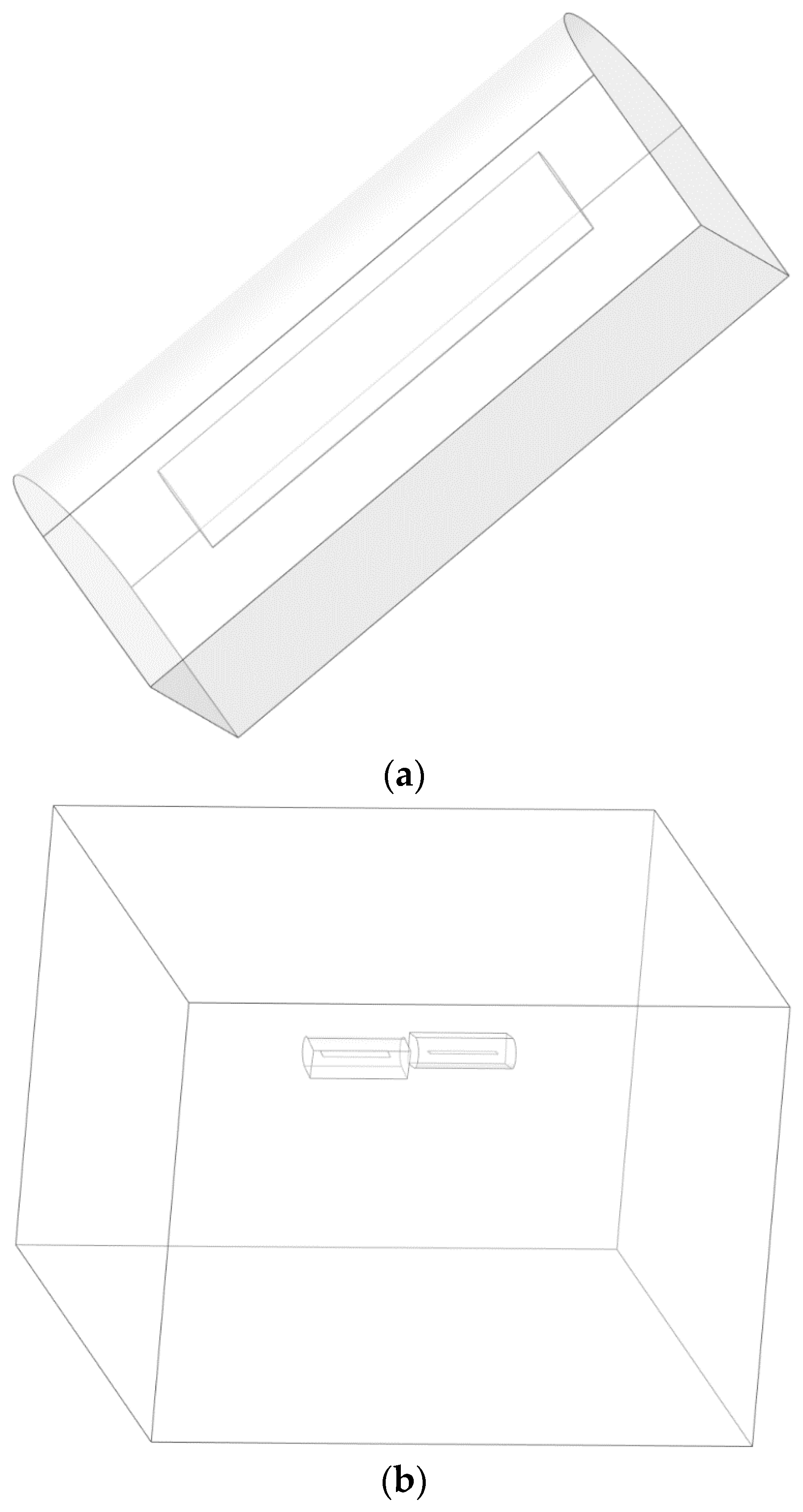
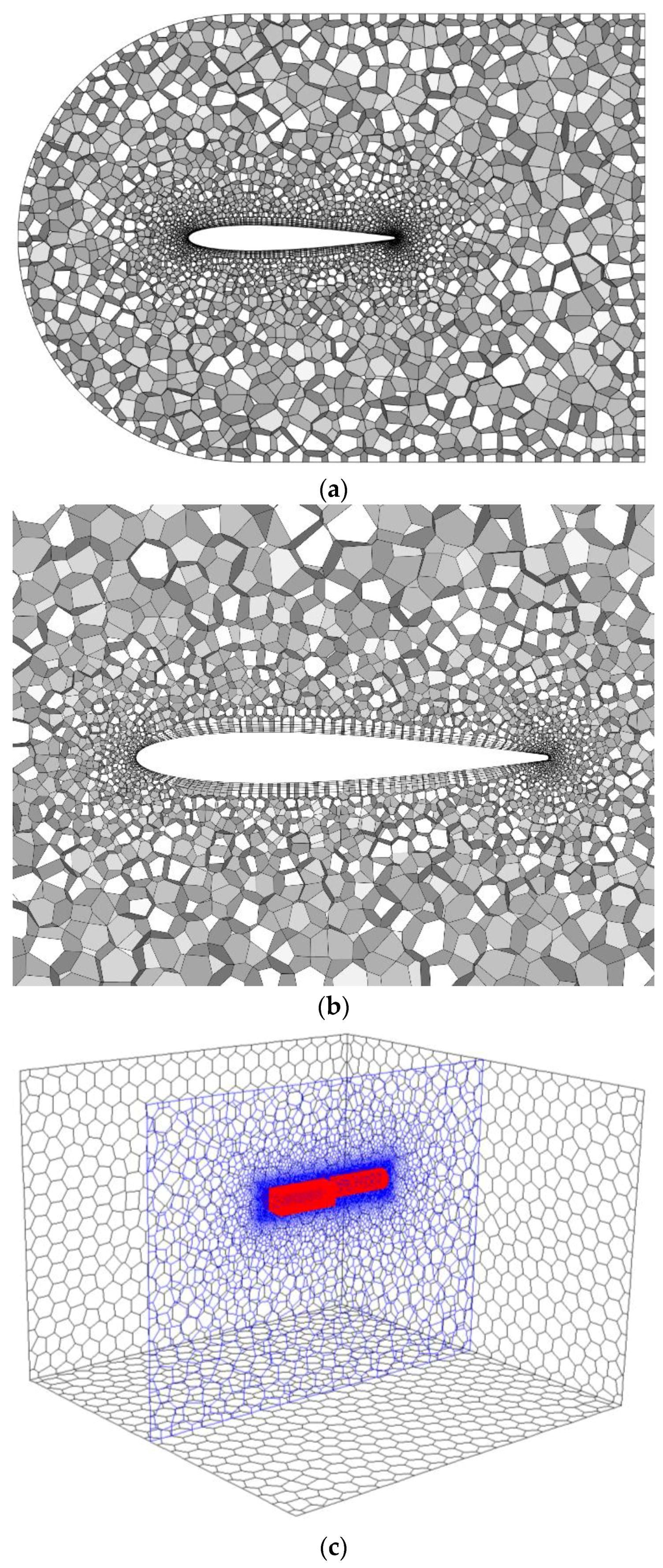
2.2. Grid System
3. Validation of CFD Simulation Method
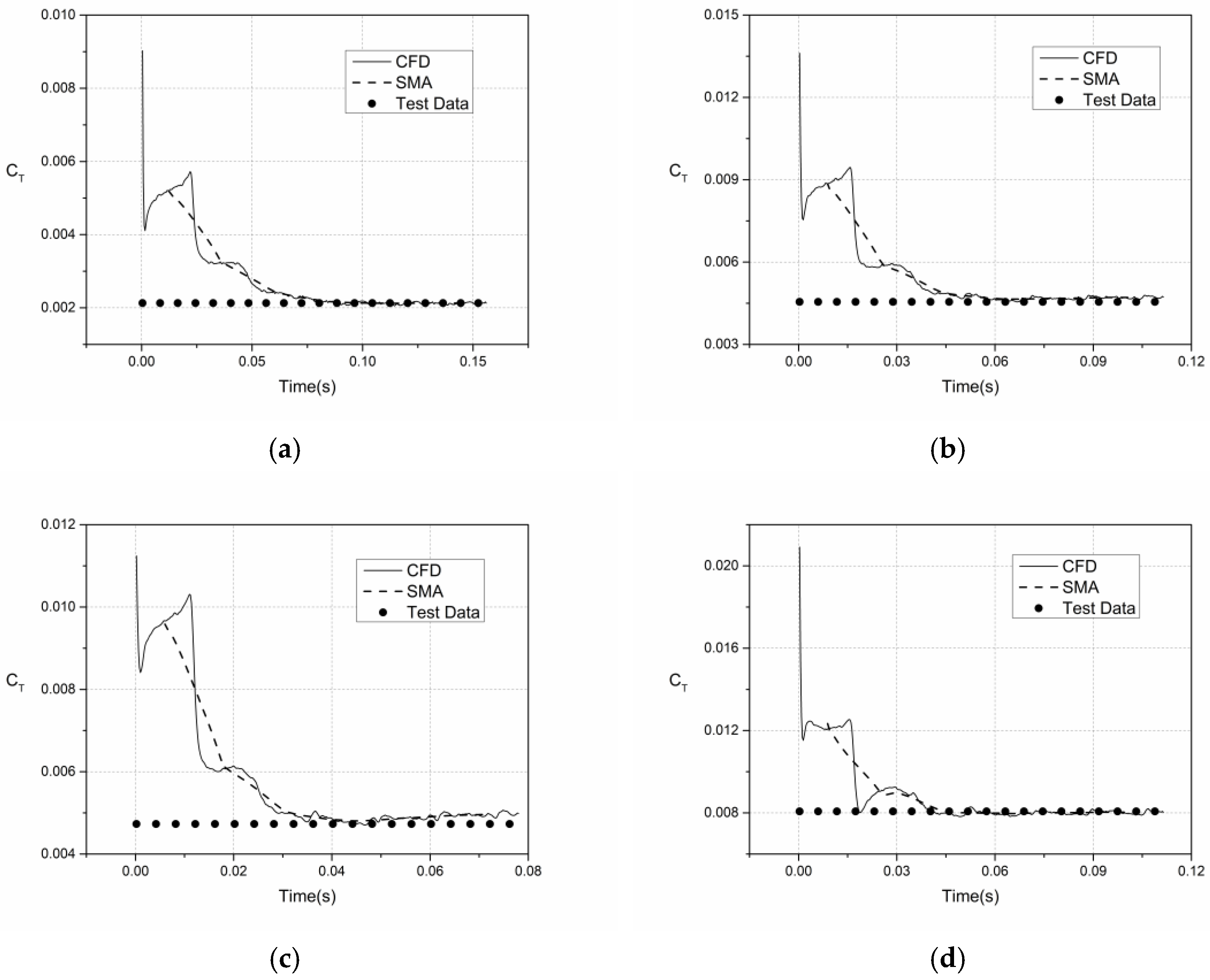
3.1. C-T Rotor in Hover
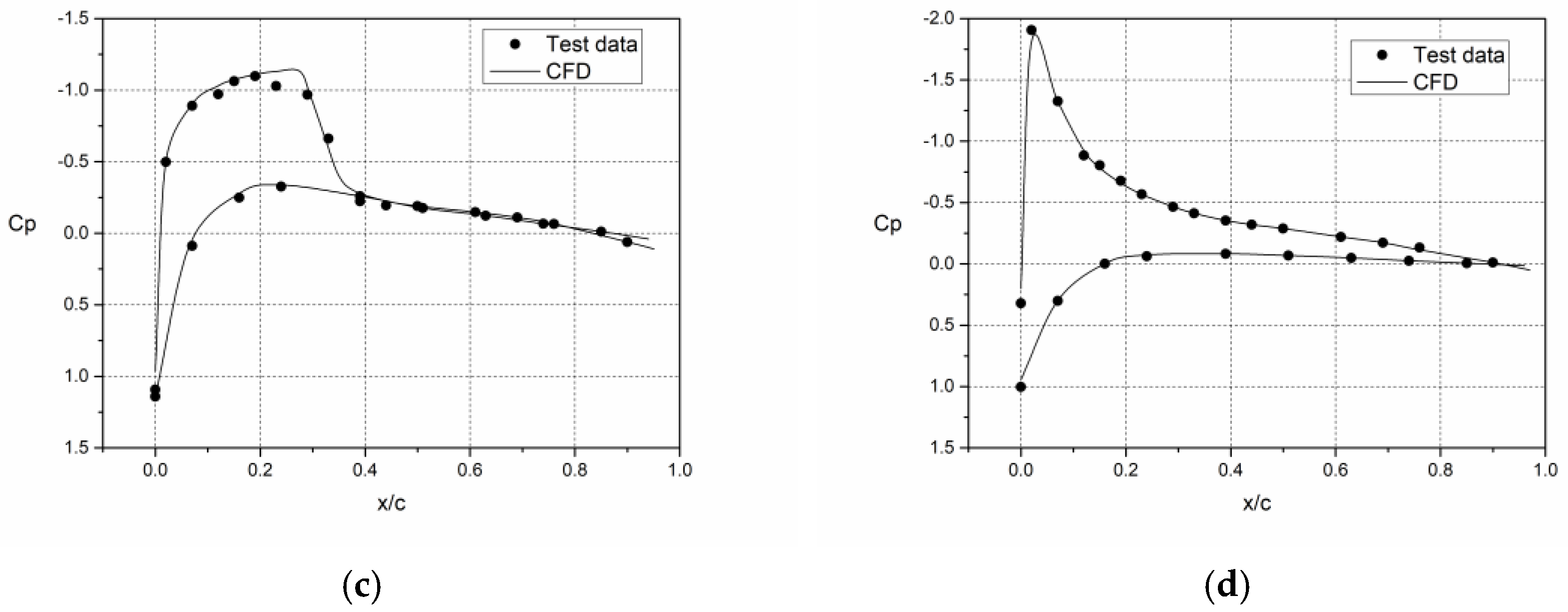
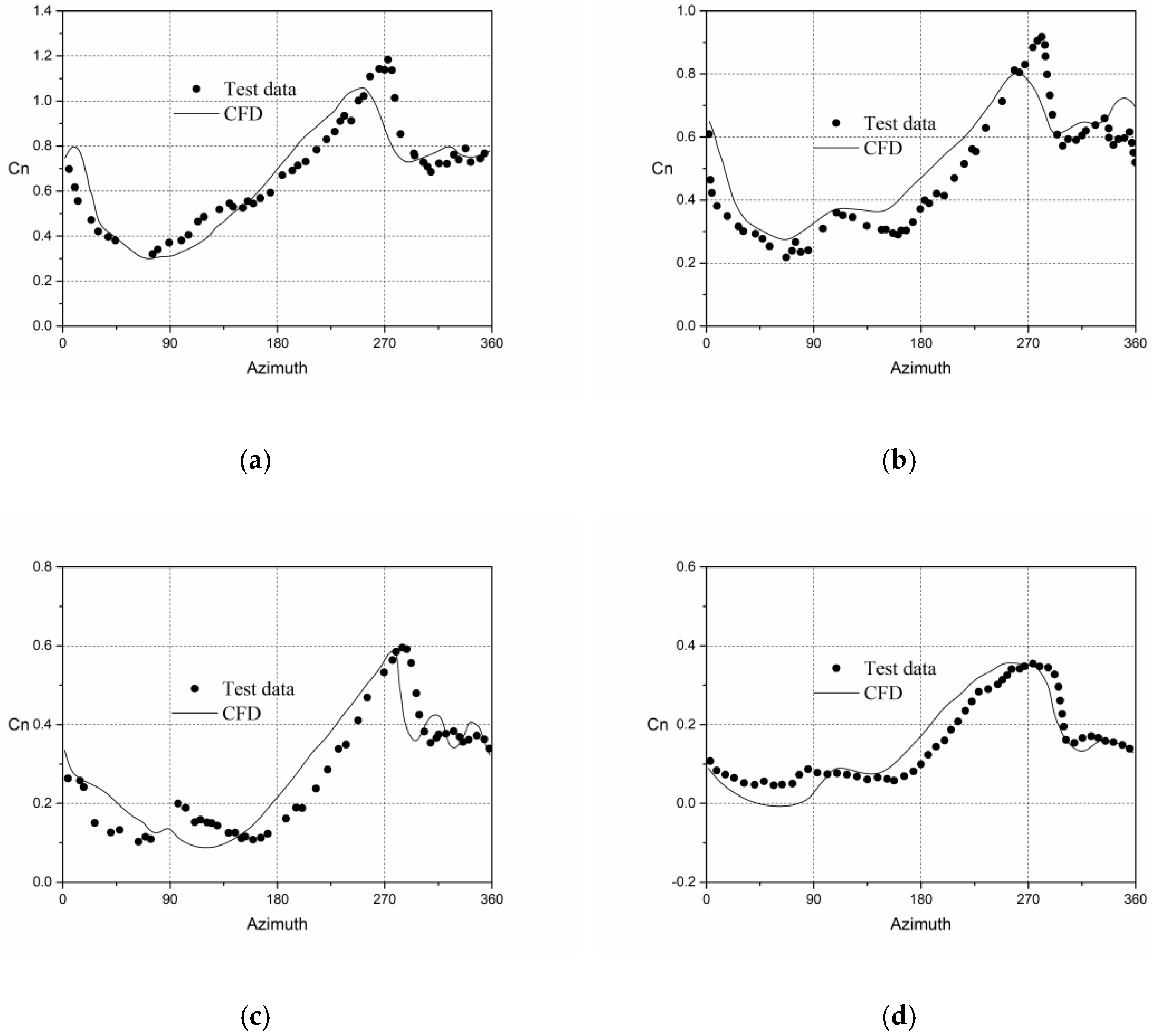
3.2. AH-1G Rotor in Forward Flight
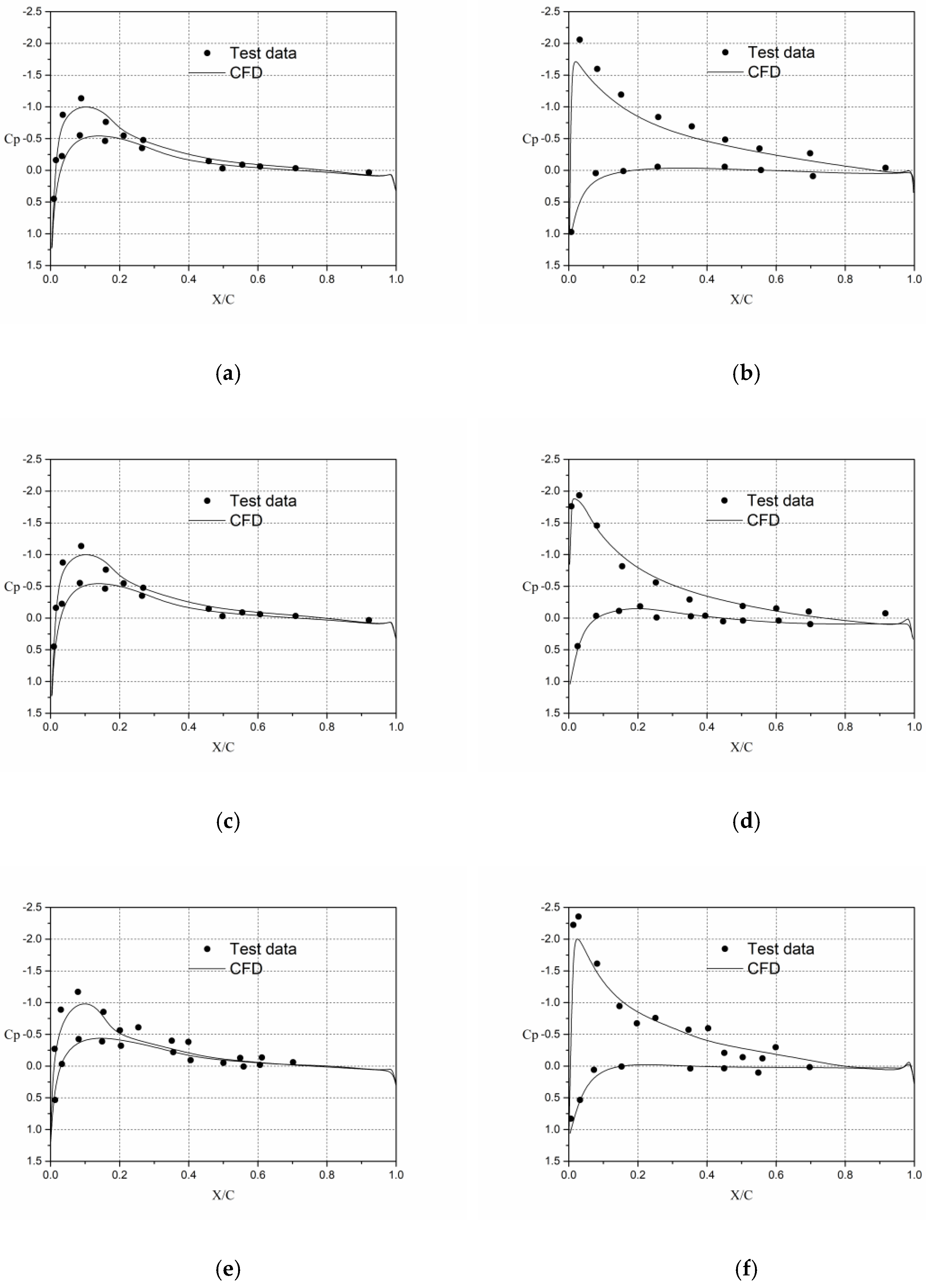
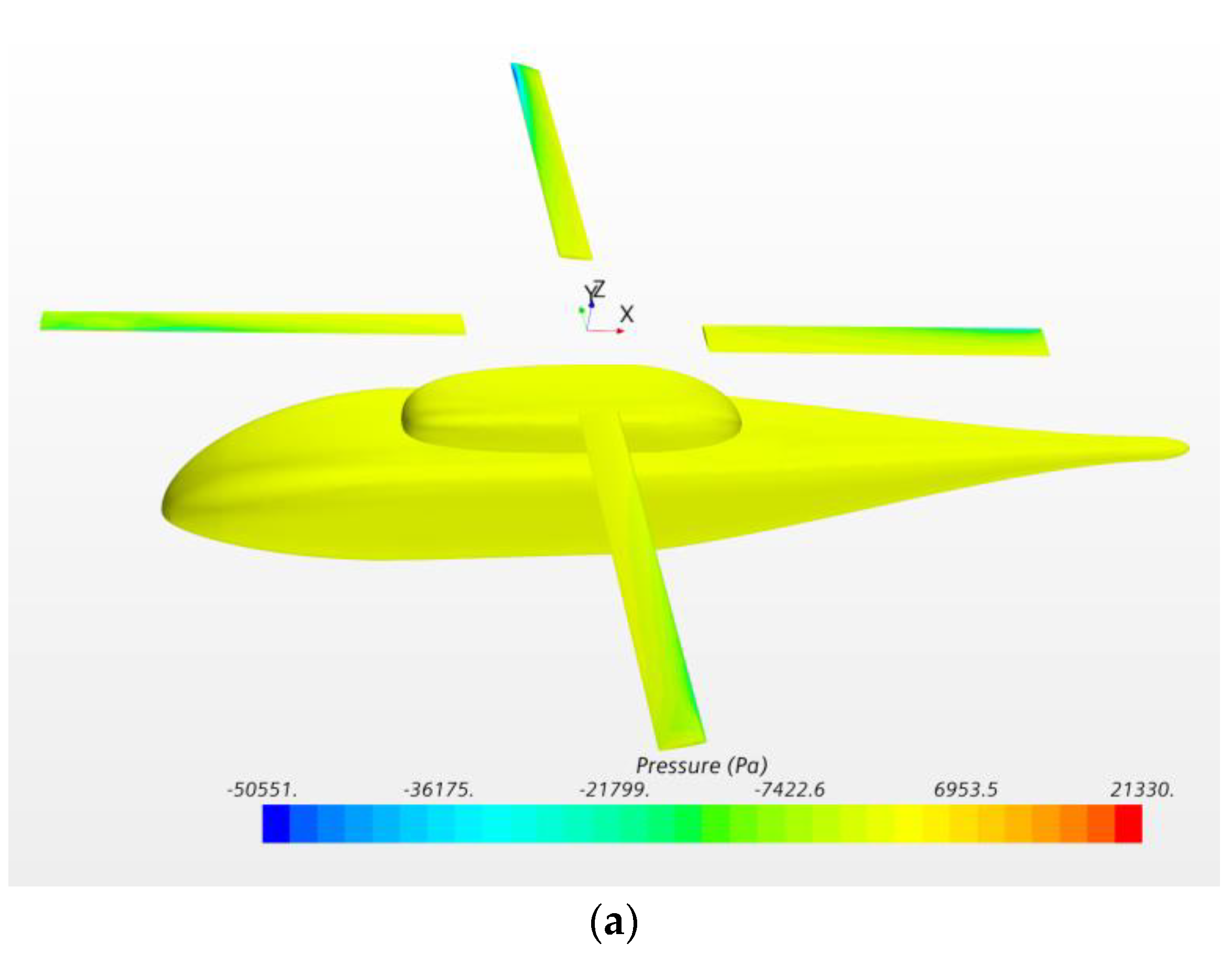
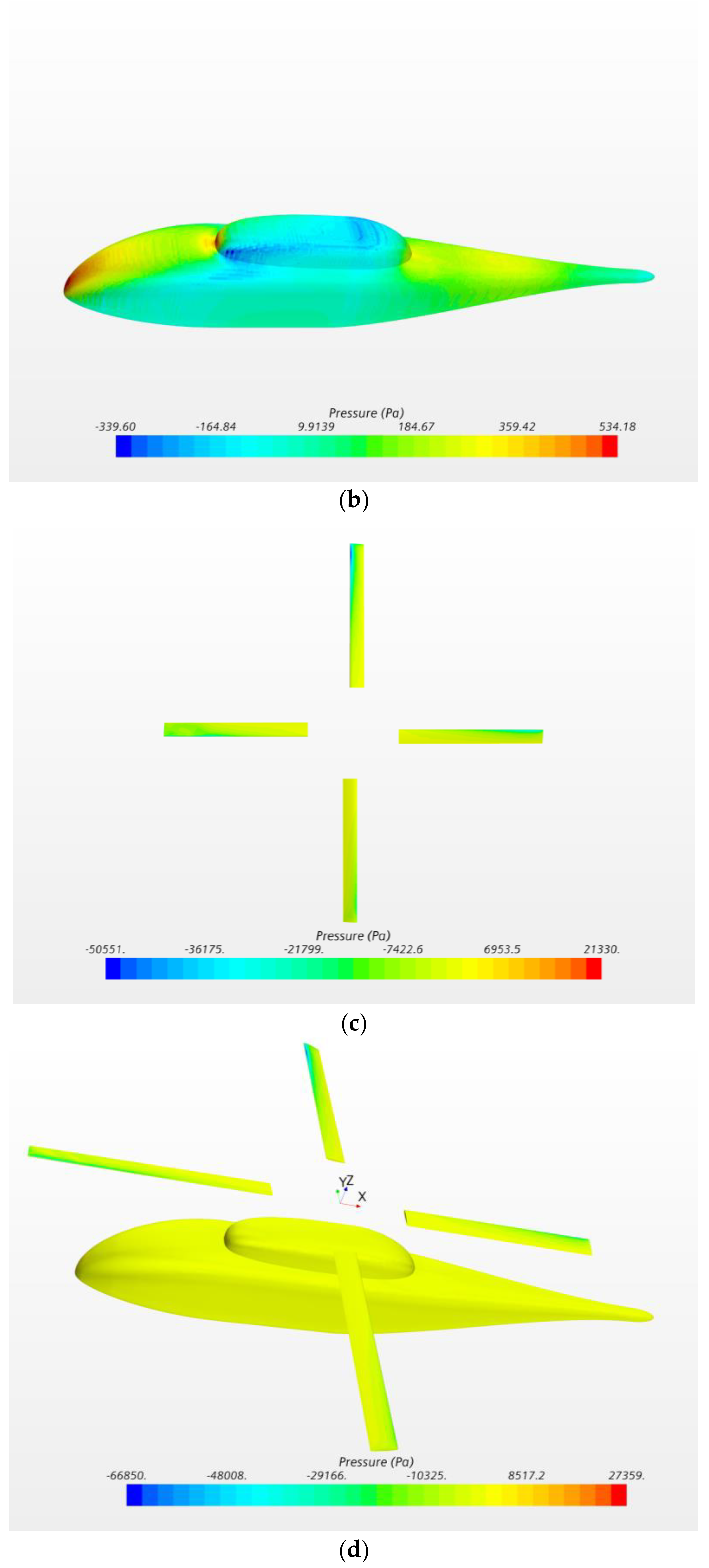
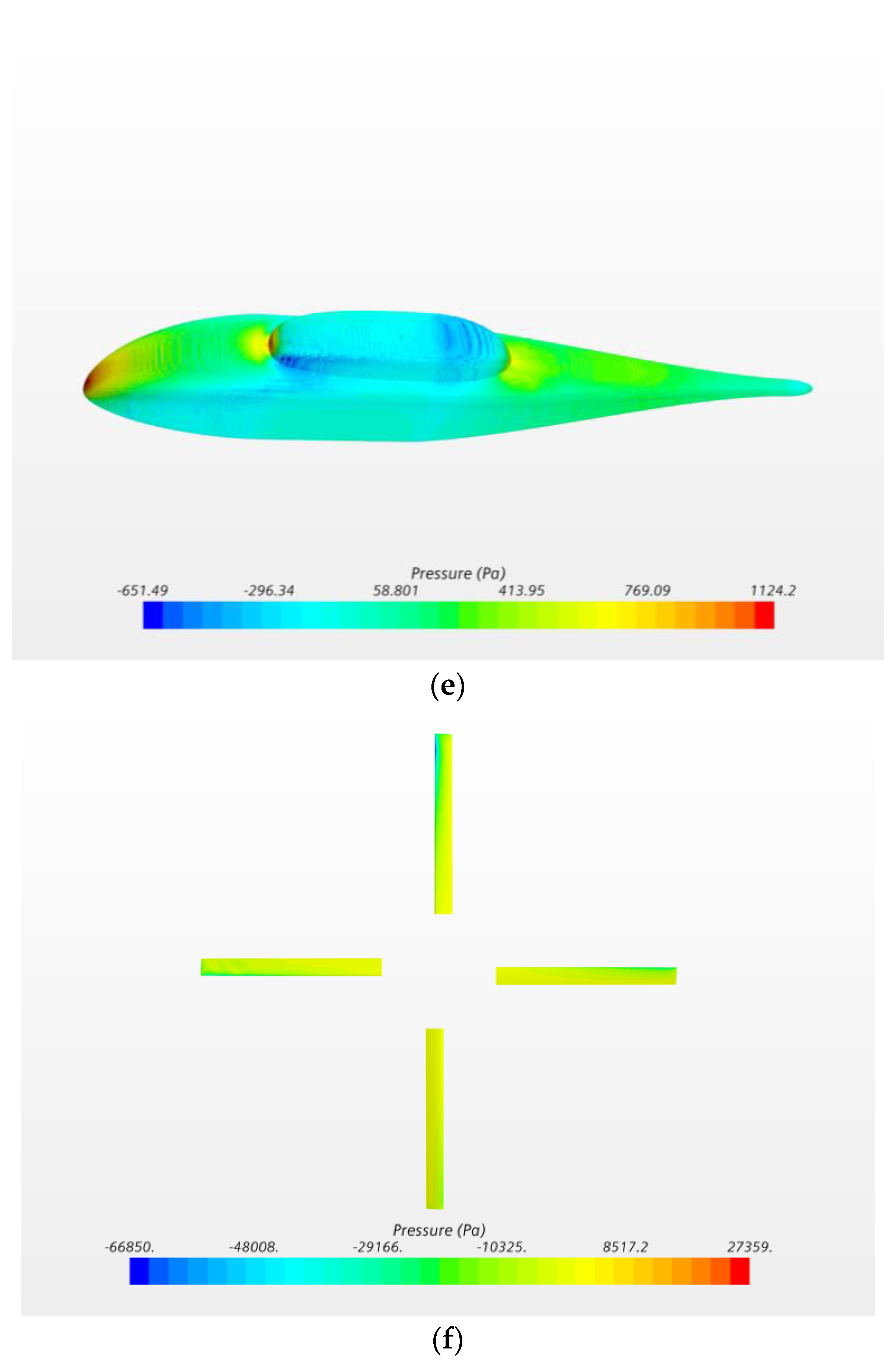
3.3. Robin Rotor/Fuselage Interference Flow Field
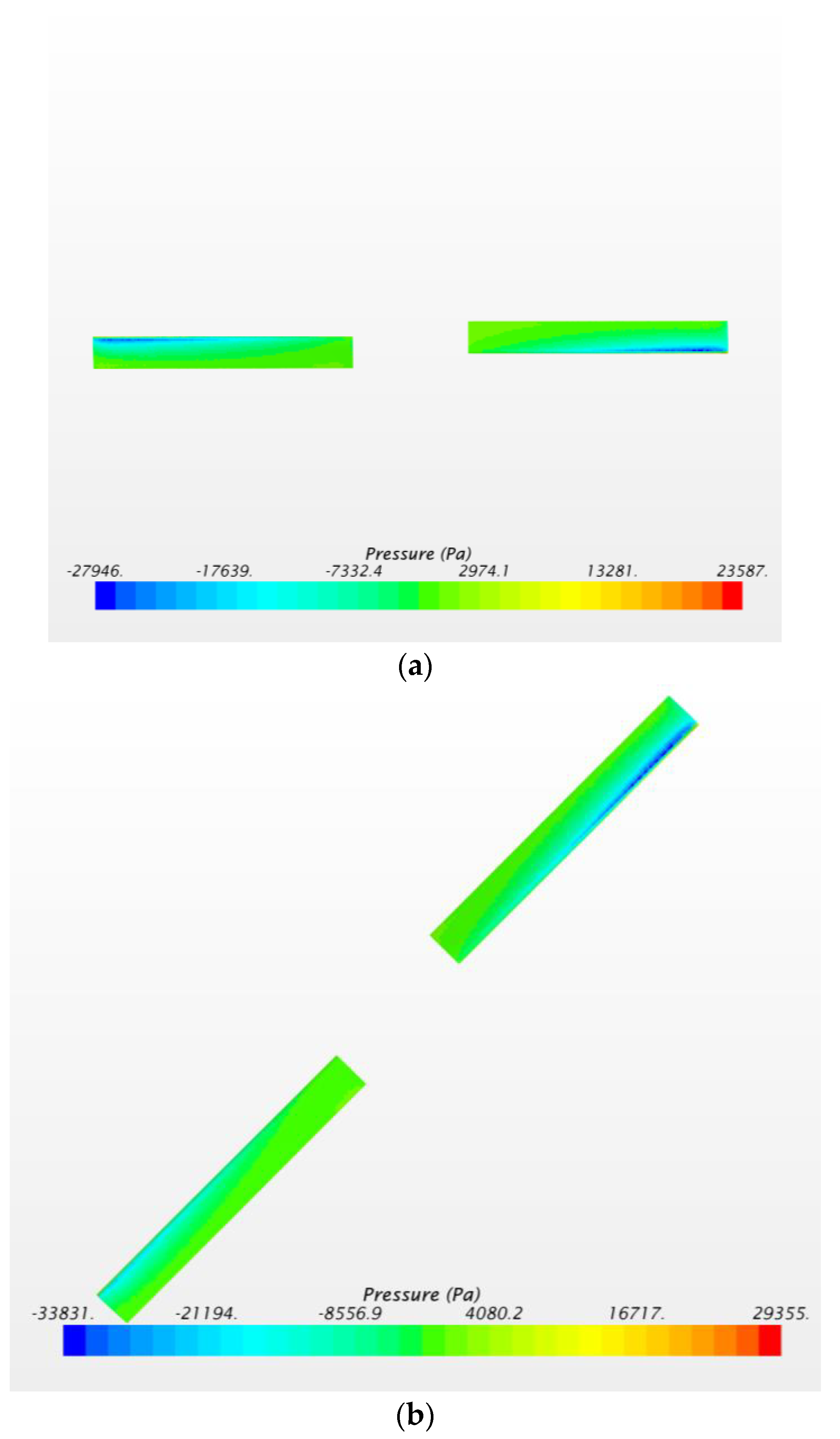
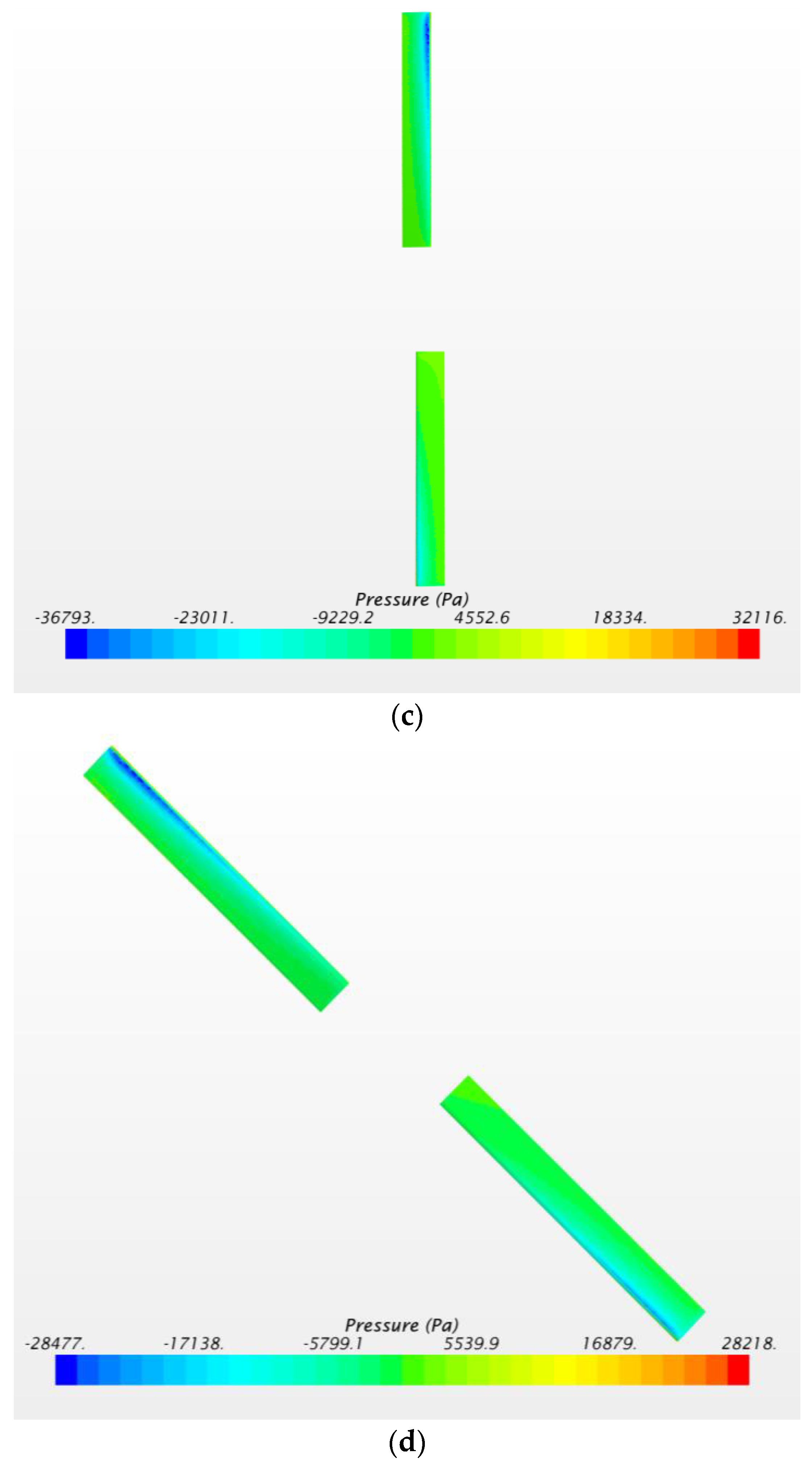
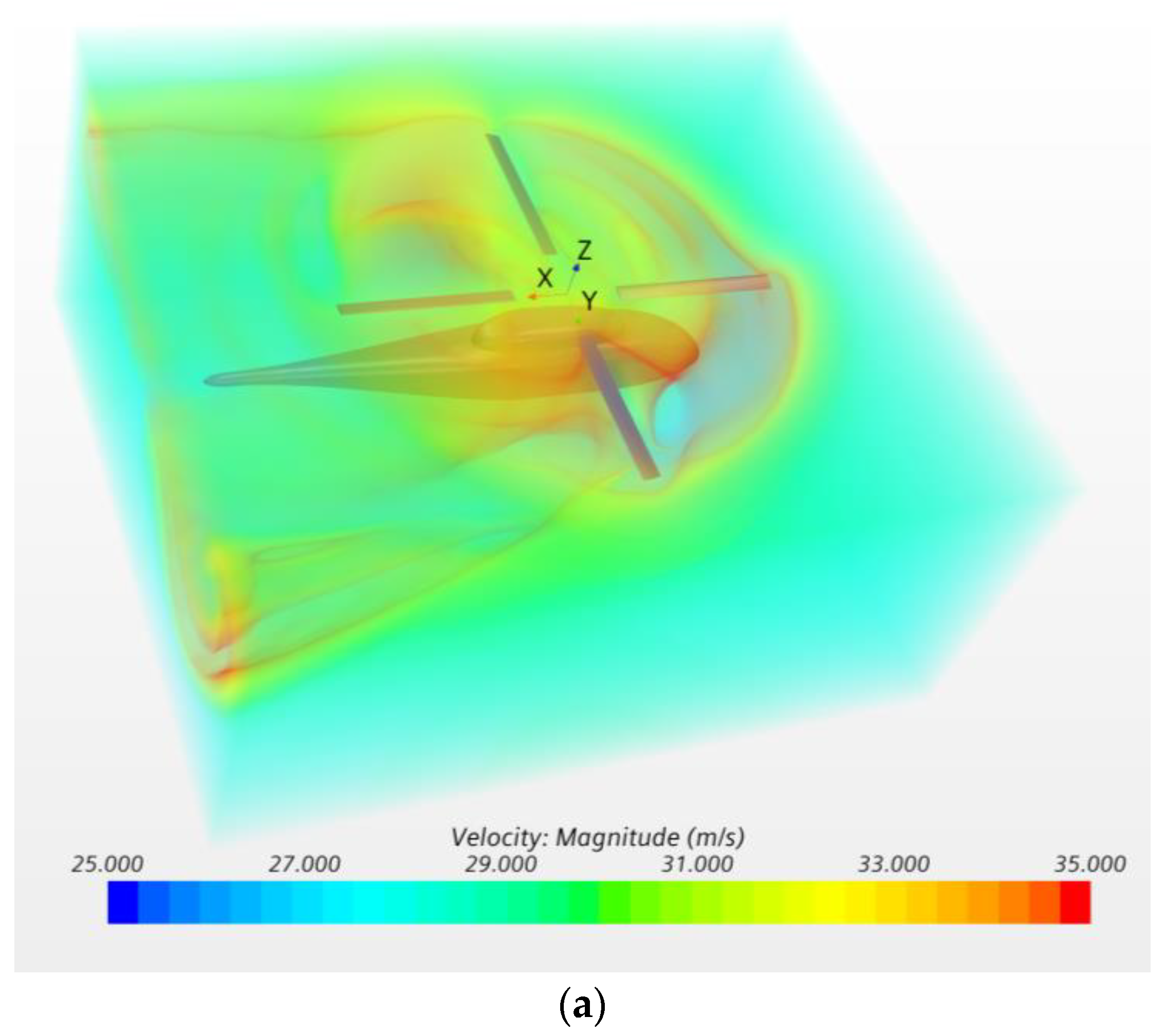
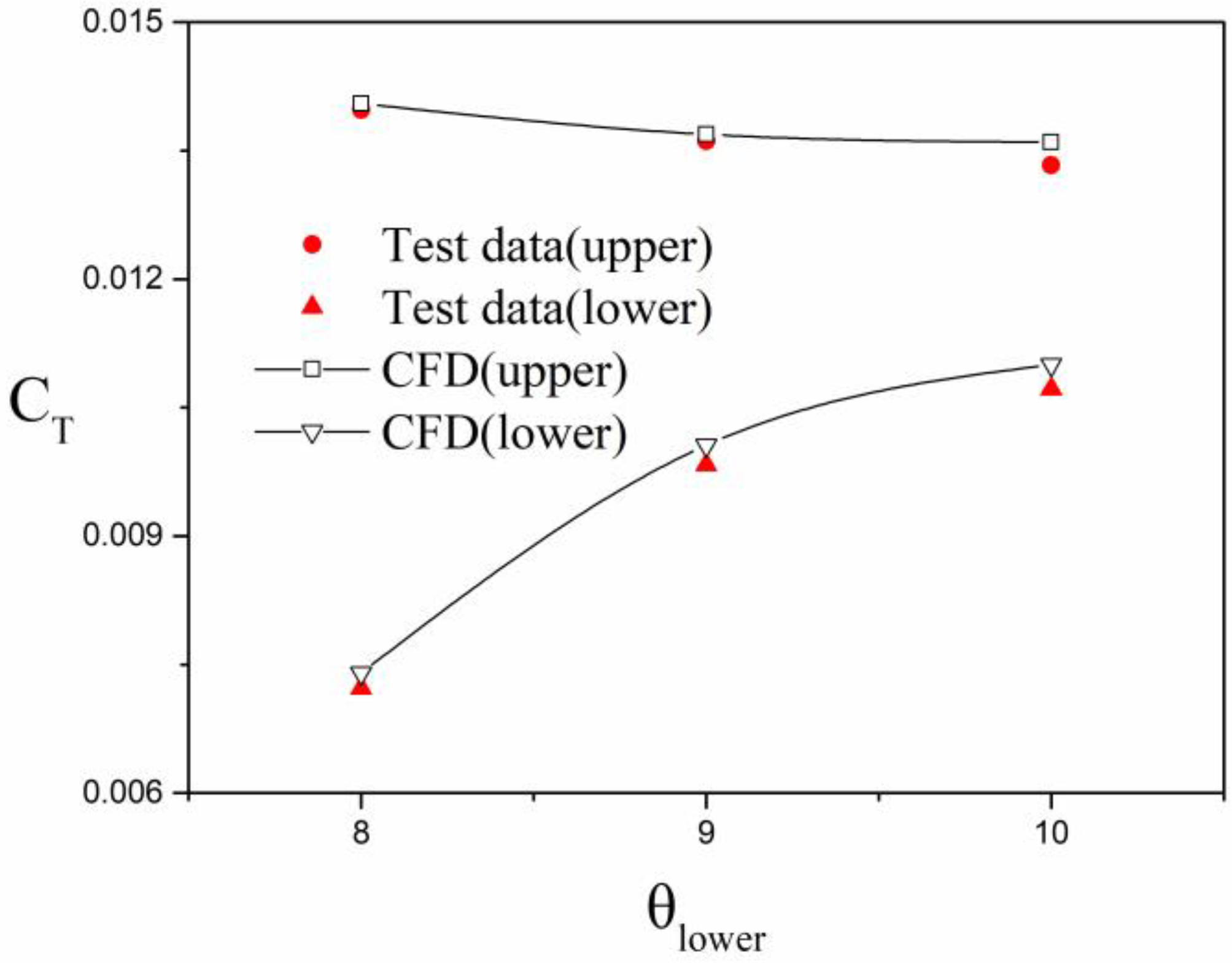
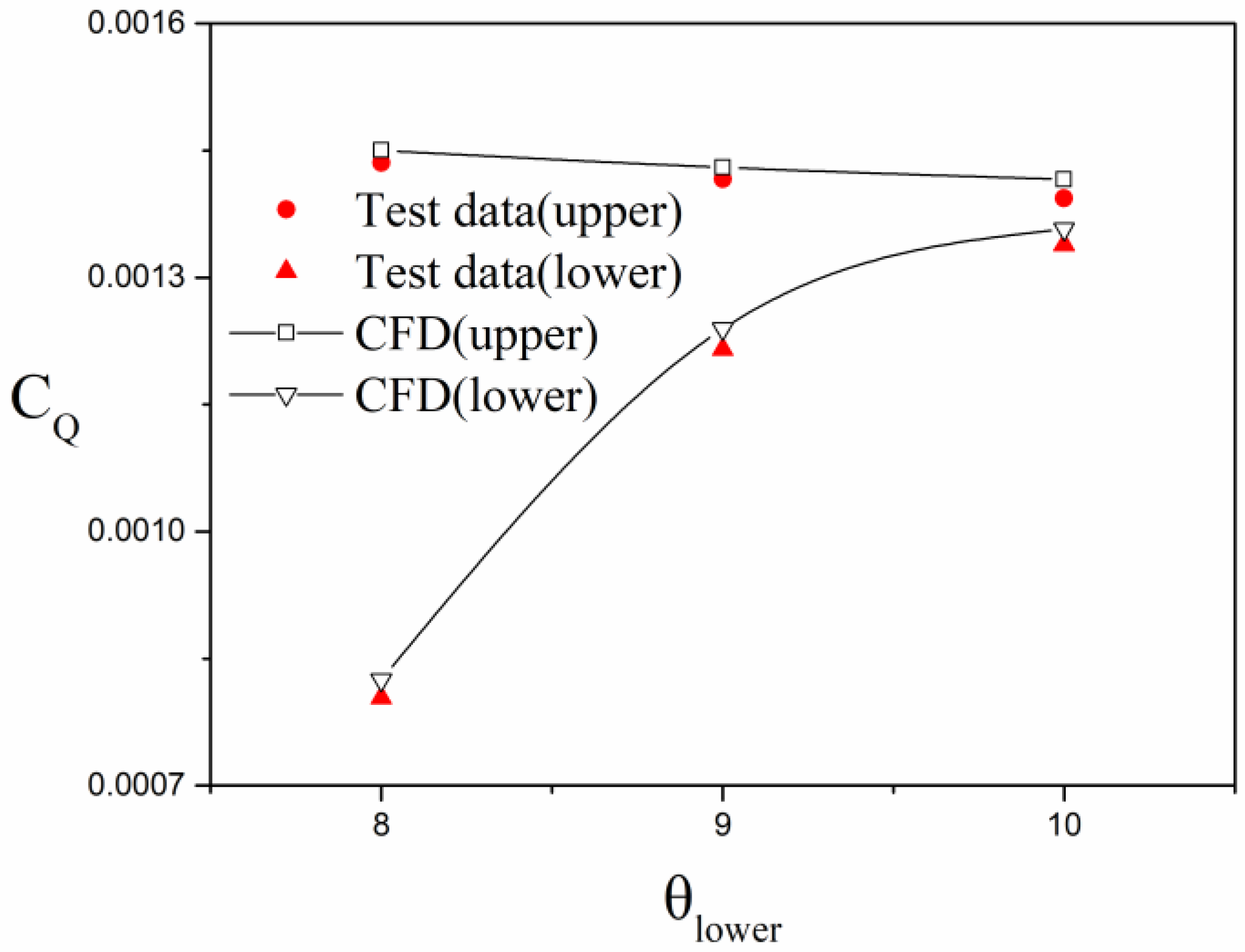
3.4. Coaxial Rotor in Hover
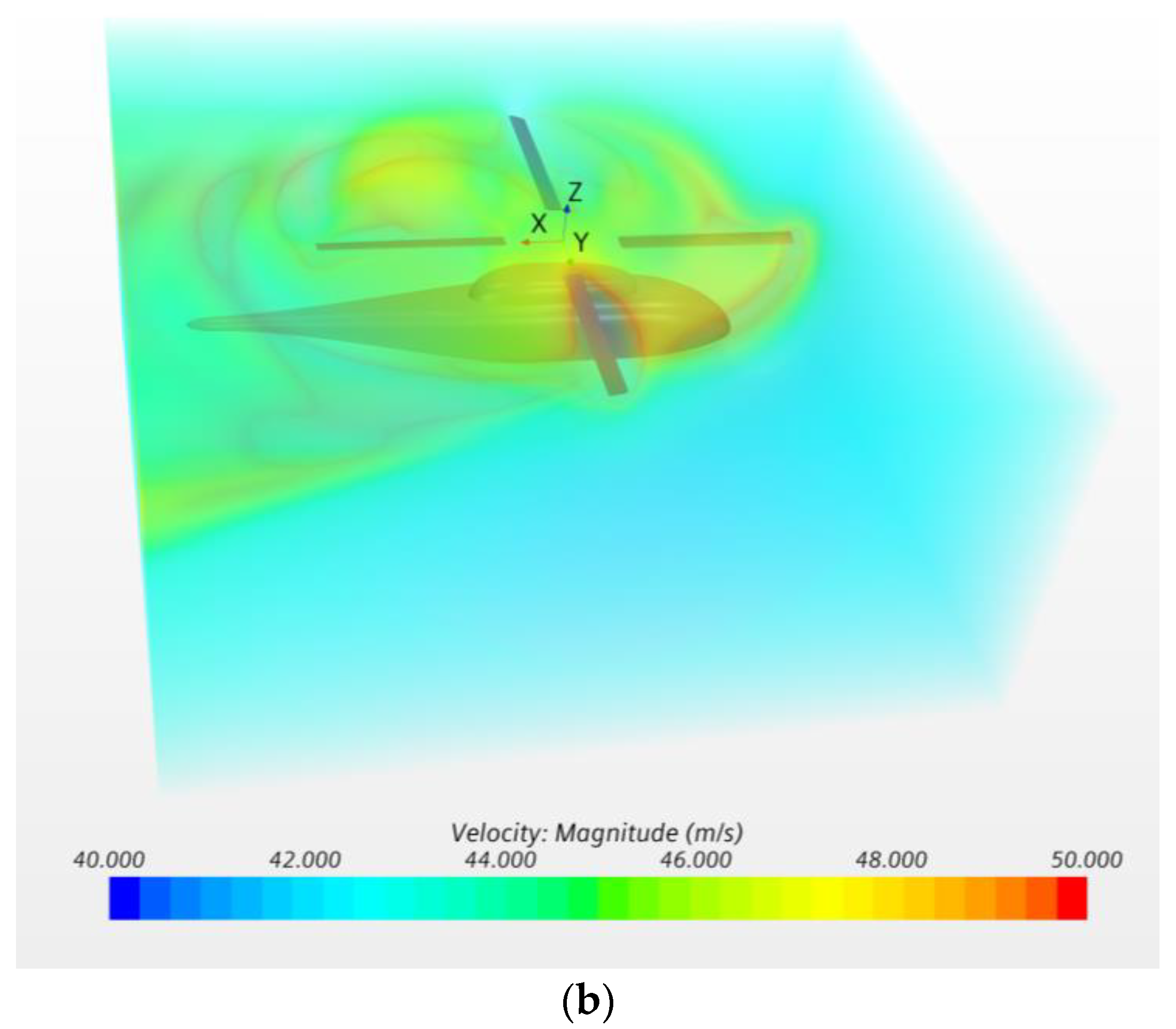
3.5. Coaxial Rotor in Forward Flight
4. Conclusions
- (1)
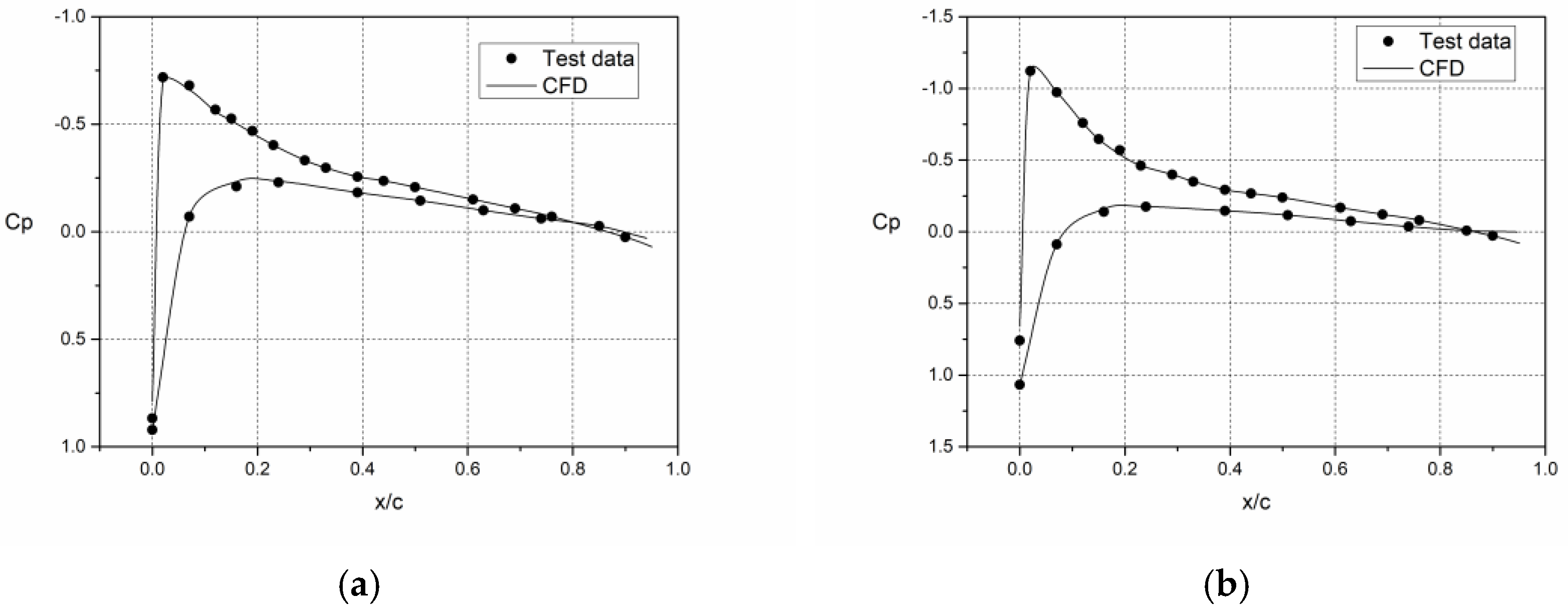
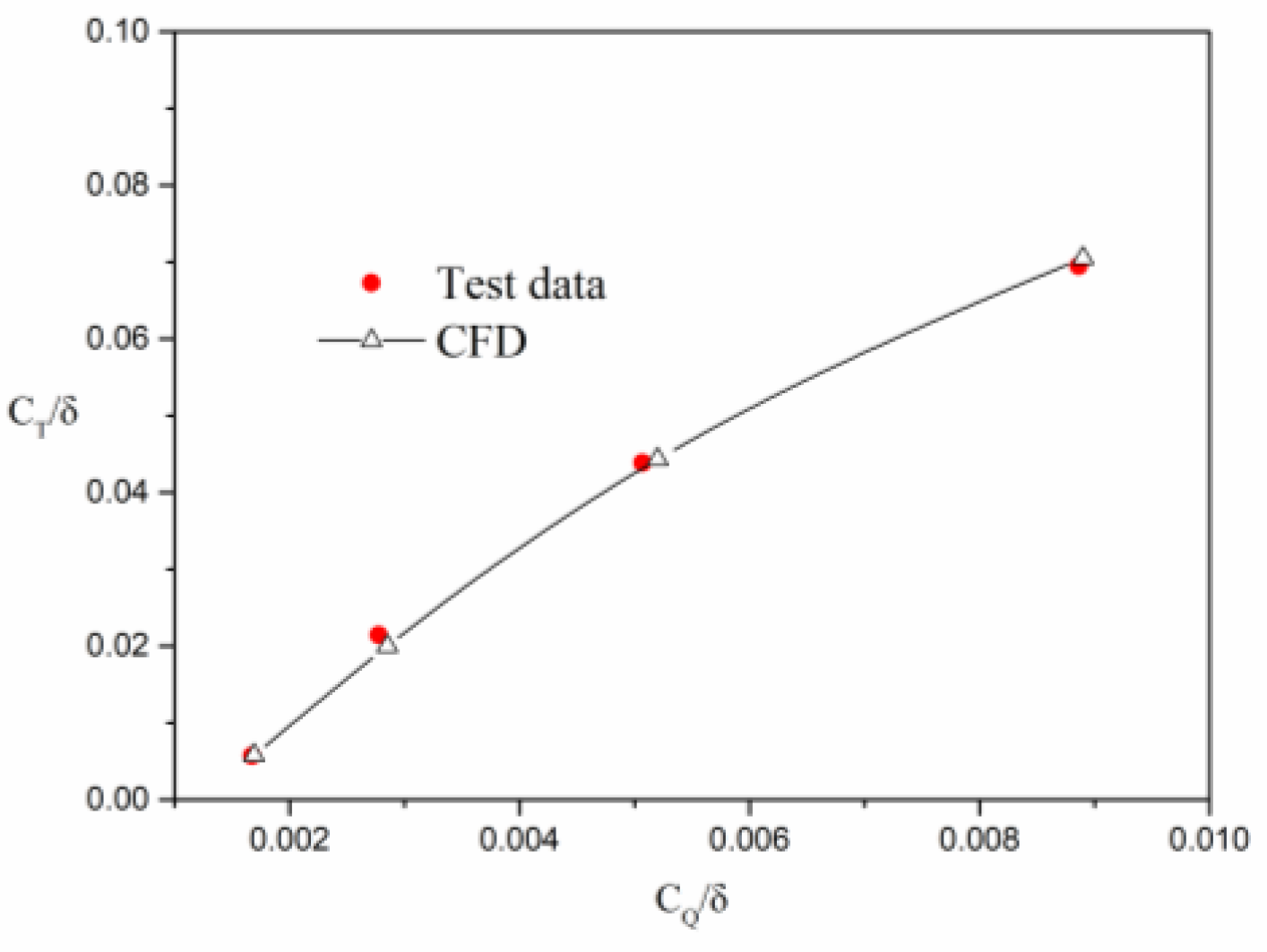
- By comparing the numerical simulation results with the test data, it is found that the numerical simulation results and the test data have a high consistency, which proves that the simulation method and grid method proposed in this paper are suitable for the aerodynamic simulation of the helicopter;
- (2)
- In the process of numerical simulation, polyhedral meshes can significantly reduce the number of meshes and shorten the calculation time of numerical simulation. At the same time, they can meet the requirement of high precision of helicopter flow field simulation, which has high engineering application value;
- (3)
- At present, there are many applications of structural grids in CFD simulation of helicopters. With the increase in the complexity of helicopter model and motion form, the time cost of structural grids becomes very high, and the new unstructured mesh represented by polyhedral mesh will undoubtedly be the research hotspot in the future.
Author Contributions
Funding
Conflicts of Interest
References
- Burley, C.L.; Brooks, T.F.; Rozier, K.Y.; Van Der Wall, B.; Richard, H.; Raffel, M.; Beaumier, P.; Delrieux, Y.; Lim, J.W.; Yu, Y.H.; et al. Rotor Wake Vortex Definition-Evaluation of 3-C PIV Results of the HART-II Study. Int. J. Aeroacoust. 2006, 5, 1–38. [Google Scholar] [CrossRef]
- Komerath, N.M.; Smith, M.J.; Tung, C. A Review of Rotor Wake Physics and Modeling. J. Am. Helicopter Soc. 2011, 56, 22006-1–22006-19. [Google Scholar] [CrossRef]
- Brocklehurst, A.; Barakos, G. A review of helicopter rotor blade tip shapes. Prog. Aerosp. Sci. 2013, 56, 35–74. [Google Scholar] [CrossRef]
- Tejero, F.E.; Doerffer, P.; Szulc, O.; Cross, J.L. Numerical simulation of the tip aerodynamics and acoustics test. J. Therm. Sci. 2016, 25, 153–160. [Google Scholar] [CrossRef]
- Benek, J.; Buning, P.; Steger, J. A 3-D chimera grid embedding technique. In Proceedings of the 7th Computational Physics Conference, Cincinnati, OH, USA, 15–17 July 1985; pp. 322–331. [Google Scholar]
- Steijl, R.; Barakos, G. Sliding mesh algorithm for CFD analysis of helicopter rotor-fuselage aerodynamics. Int. J. Numer. Methods Fluids 2008, 58, 527–549. [Google Scholar] [CrossRef]
- Bottasso, C.L.; Detomi, D.; Serra, R. The ball-vertex method: A new simple spring analogy method for unstructured dynamic meshes. Comput. Methods Appl. Mech. Eng. 2005, 194, 4244–4264. [Google Scholar] [CrossRef]
- Wissink, A.; Potsdam, M.; Sankaran, V.; Sitaraman, J.; Yang, Z.; Mavriplis, D. A coupled unstructured-adaptive Cartesian CFD approach for hover prediction. In Proceedings of the AHS International 66th Annual Forum Proceedings, Phoenix, AZ, USA, 11 May 2010; pp. 1300–1317. [Google Scholar]
- Lim, J.; Wissink, A.; Jayaraman, B.; Dimanlig, A. Application of adaptive mesh refinement technique in Helios to blade-vortex interaction loading and rotor wakes. In Proceedings of the 67th Annual Forum of the American Helicopter Society International, Virginia Beach, VA, USA, 3–5 May 2011; pp. 228–250. [Google Scholar]
- Jameson, A.; Mavriplis, D. Finite volume solution of the two-dimensional Euler equations on a regular triangular mesh. AIAA J. 1986, 24, 611–618. [Google Scholar] [CrossRef]
- Li, Z.; Wang, Z.; Cao, W.; Yao, L. An aspect ratio agglomeration multigrid for unstructured grids. Int. J. Numer. Methods Fluids 2013, 72, 1034–1050. [Google Scholar] [CrossRef]
- Nishikawa, H.; Diskin, B. Development and Application of Parallel Agglomerated Multigrid Method for Complex Geometries. In Proceedings of the 20th AIAA Computational Fluid Dynamics Conference, Honolulu, HI, USA, 27–30 June 2011; pp. 2514–2528. [Google Scholar]
- Shi, Y.; Xu, Y.; Xu, G.; Wei, P. A coupling VWM/CFD/CSD method for rotor airload prediction. Chin. J. Aeronaut. 2017, 30, 204–215. [Google Scholar] [CrossRef]
- Zhao, Q.; Zhao, G.; Wang, B.; Wang, Q.; Shi, Y.; Xu, G. Robust Navier-Stokes method for predicting unsteady flowfield and aerodynamic characteristics of helicopter rotor. Chin. J. Aeronaut. 2018, 31, 214–224. [Google Scholar] [CrossRef]
- Zhou, C.; Chen, M. Computational fluid dynamics trimming of helicopter rotor in forward flight. Adv. Mech. Eng. 2020, 12, 1–13. [Google Scholar] [CrossRef]
- Barakos, G.; FitzGibbon, T.; Kusyumov, A.; Kusyumov, S.; Mikhailov, S. CFD simulation of helicopter rotor flow based on unsteady actuator disk model. Chin. J. Aeronaut. 2020, 33, 2313–2328. [Google Scholar] [CrossRef]
- Tang, Q.; Zhang, R.; Chen, L.; Deng, W.; Xu, M.; Xu, G.; Li, L.; Hewitt, A. Numerical simulation of the downwash flow field and droplet movement from an unmanned helicopter for crop spraying. Comput. Electron. Agric. 2020, 174, 105468. [Google Scholar] [CrossRef]
- Spalart, P.; Allmaras, S. A one-equation turbulence model for aerodynamic flows. Rech. Aerosp. 1994, 1, 5–21. [Google Scholar]
- Roe, P. Approximate Riemann Solvers, Parameter Vectors, and Difference Schemes. J. Comput. Phys. 1997, 135, 250–258. [Google Scholar] [CrossRef] [Green Version]
- Harten, A.; Hyman, J.M. Self adjusting grid methods for one-dimensional hyperbolic conservation laws. J. Comput. Phys. 1983, 50, 235–269. [Google Scholar] [CrossRef]
- Jameson, A. Time dependent calculations using multigrid, with applications to unsteady flows past airfoils and wings. In Proceedings of the 10th Computational Fluid Dynamics Conference, Honolulu, HI, USA, 24–27 June 1991. [Google Scholar]
- Jameson, A.; Schmidt, W.; Turkel, E. Numerical solution of the Euler equations by finite volume methods using Runge Kutta time stepping schemes. In Proceedings of the 14th Fluid and Plasma Dynamics Conference, Palo Alto, CA, USA, 23–25 June 1981; AIAA Journal: Reston, VA, USA. [Google Scholar] [CrossRef] [Green Version]
- Caradonna, F.X.; Tung, C. Experimental and analytical studies of a model helicopter rotor in hover. Vertica 1981, 5, 149–161. [Google Scholar]
- Cross, J.F.; Watts, M.E. Tip Aerodynamics and Acoustics Test: A Report and Data Survey; NASA Langley Technical Report Server: Washington, DC, USA, 1988. Available online: https://ntrs.nasa.gov/citations/19890008208 (accessed on 5 September 2013).
- Ahmad, J.; Duque, E.P.N. Helicopter rotor blade computation in unsteady flows using moving overset grids. J. Aircr. 1996, 33, 54–60. [Google Scholar] [CrossRef]
- Yang, Z.; Sankar, L.N.; Smith, M.J.; Bauchau, O. Recent Improvements to a Hybrid Method for Rotors in Forward Flight. J. Aircr. 2002, 39, 804–812. [Google Scholar] [CrossRef]
- Hernandez, F.; Johnson, W. Correlation of airloads on a Two-Bladed helicopter rotor. In Proceedings of the International Specialist Meeting on Rotorcraft Acoustics and Rotor Fluid Dynamics, Philadelphia, PA, USA, 15–17 October 1991. [Google Scholar]
- Ramachandran, K.; Schlechtriem, S.; Caradonna, F.X.; Steinhoff, J.S. Free-Wake Computation of Helicopter Rotor Flowfield in Forward Flight. In Proceedings of the AIAA 23rd Fluid Dynamics, Plasma Dynamics and Lasers Conference; Orlando, FL, USA, 6–9 July 1993, NASA Langley Technical Report Server: Washington, DC, USA, 1993. Available online: https://ntrs.nasa.gov/citations/19930064256 (accessed on 16 August 2013).
- Raymond, E.M.; Susan, A.G. Steady and Periodic Pressure Measurements on a Generic Helicopter Fuselage Model in the Presence of a Rotor; NASA Langley Technical Report Server: Washington, DC, USA, 2000. Available online: https://ntrs.nasa.gov/citations/20000057579 (accessed on 7 September 2013).
- Phelps, A.E.; Berry, J.D. Description of the US Army Small-Scale 2-Meter Rotor Test System; NASA Langley Technical Report Server: Washington, DC, USA, 1987. Available online: https://ntrs.nasa.gov/citations/19870008231 (accessed on 5 September 2013).
- Coleman, C.P. A Survey of Theoretical and Experimental Coaxial Rotor Aerodynamic Research; NASA Langley Technical Report Server: Washington, DC, USA, 1997. Available online: https://ntrs.nasa.gov/citations/19970015550 (accessed on 6 September 2013).





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Blades | 2 |
|---|---|
| Blade radius R | 1.143 m |
| Plane shape of blade | Rectangle |
| Airfoil | NACA0012 |
| Chord length c | 0.1905 m |
| Undercut | 0.243 R |
| Torsion angle | 0° |
| Number of Blades | 2 |
| Plane shape of blade | Rectangle |
| Airfoil | OLS |
| Chord length c | 0.1039 m |
| Rotor radius R | 0.958 m |
| Undercut | 0.182 R |
| Torsion angle | −10° |
| Number of Blades | 4 |
|---|---|
| Airfoil | NACA0012 |
| Chord length c | 0.0663 m |
| Rotor radius R | 0.8604 m |
| Undercut | 0.24 R |
| Rotation speed | 2000 RPM |
| Torsion angle | −8° |
| μ | ||||
|---|---|---|---|---|
| 0.151 | 10.3 | −2.7 | 2.4 | −3° |
| 0.231 | 10.4 | −0.4 | 3.8 | −3° |
| Number of Blades | 2 + 2 |
|---|---|
| Plane shape of blade | Rectangle |
| Airfoil | NACA0012 |
| Chord length c | 0.06 m |
| Rotor radius R | 0.38 m |
| Undercut | 0.21 R |
| Rotor solidity | 0.2 |
| Torsion angle | 0° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, C.; Chen, M. Aerodynamic Simulation of Helicopter Based on Polyhedron Nested Grid Technology. Appl. Sci. 2020, 10, 8304. https://doi.org/10.3390/app10228304
Zhou C, Chen M. Aerodynamic Simulation of Helicopter Based on Polyhedron Nested Grid Technology. Applied Sciences. 2020; 10(22):8304. https://doi.org/10.3390/app10228304
Chicago/Turabian StyleZhou, Chenglong, and Ming Chen. 2020. "Aerodynamic Simulation of Helicopter Based on Polyhedron Nested Grid Technology" Applied Sciences 10, no. 22: 8304. https://doi.org/10.3390/app10228304