Stationary Target Identification in a Traffic Monitoring Radar System


Abstract
:1. Introduction
2. Traffic Monitoring Radar System
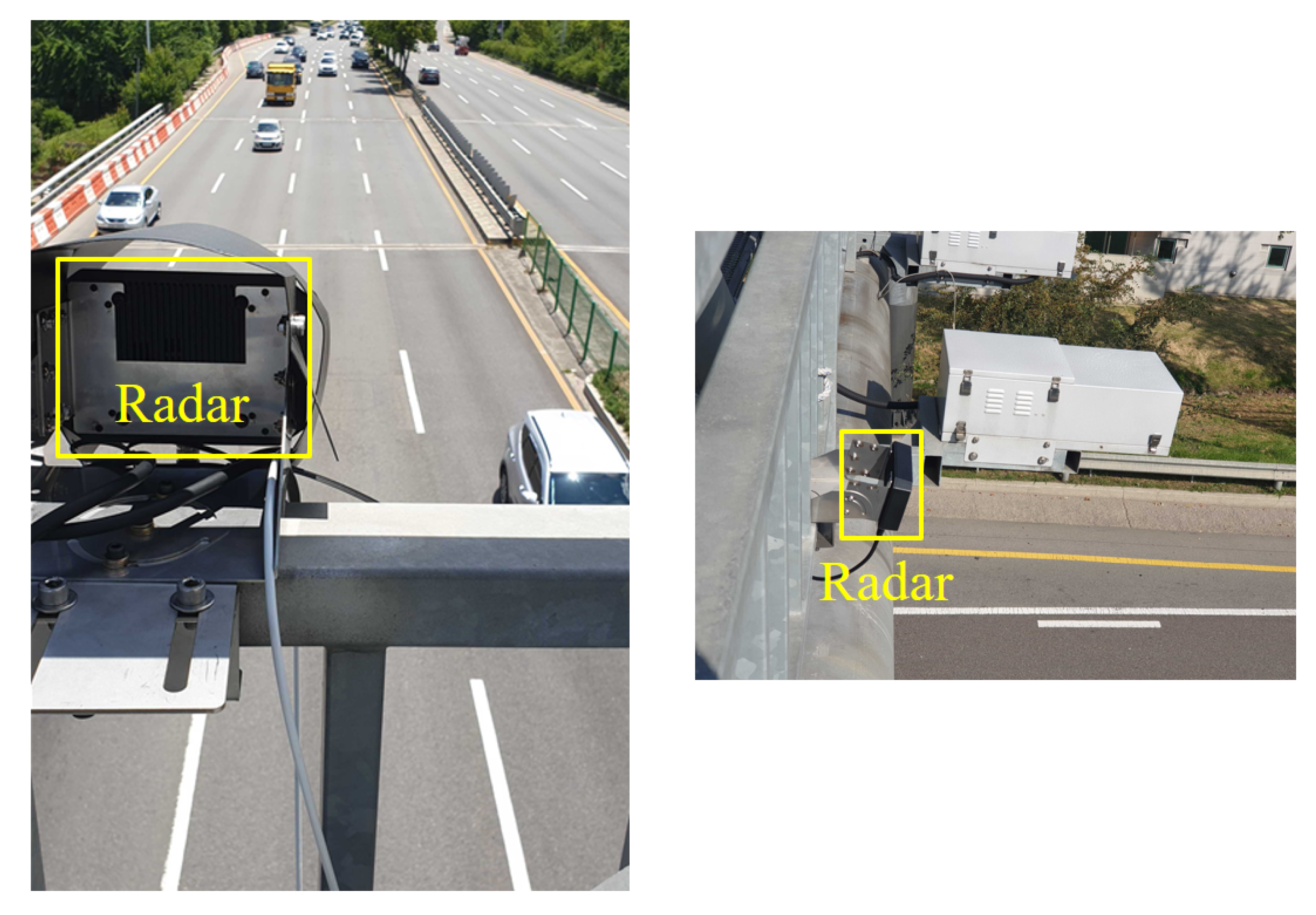
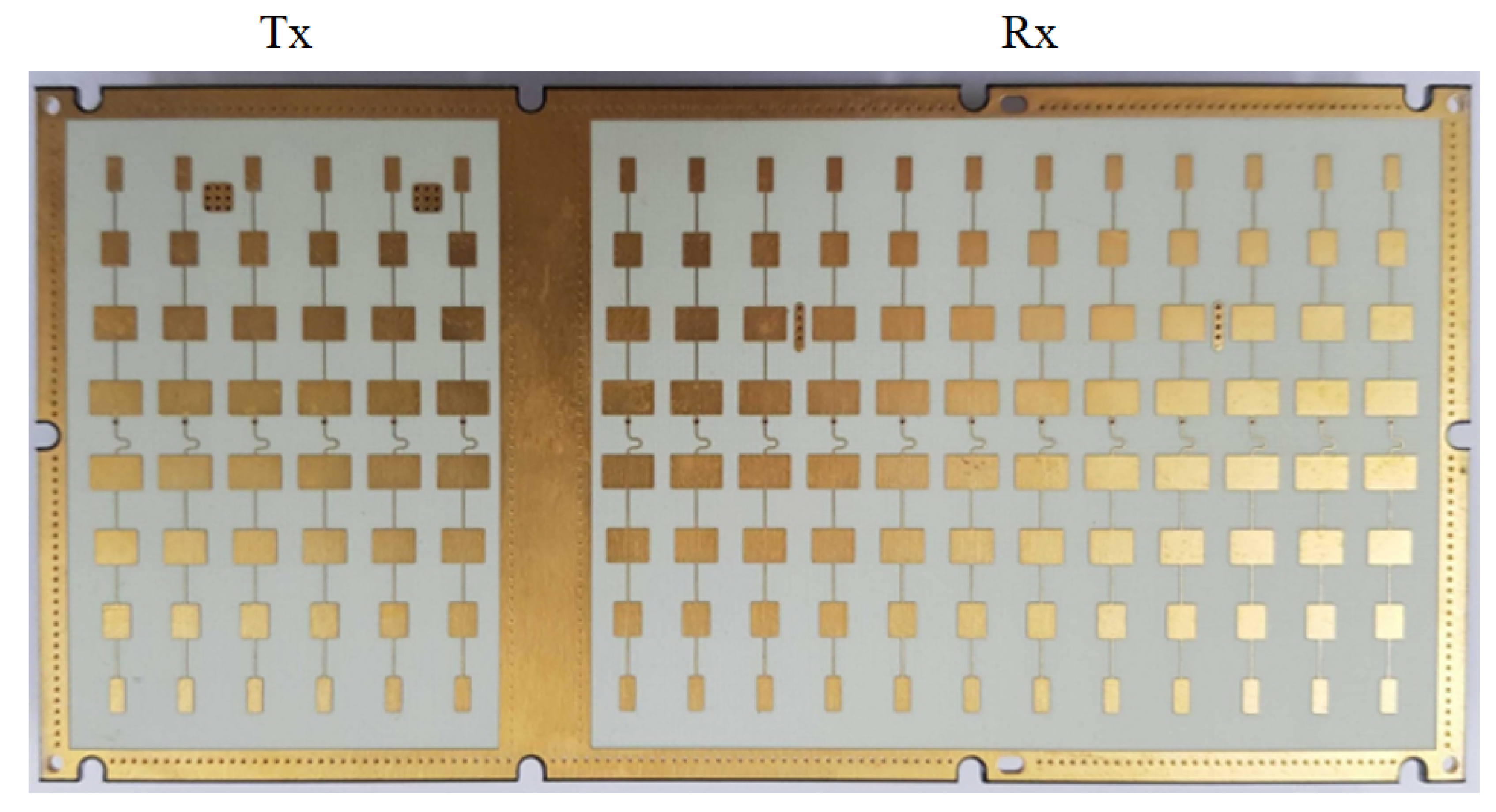
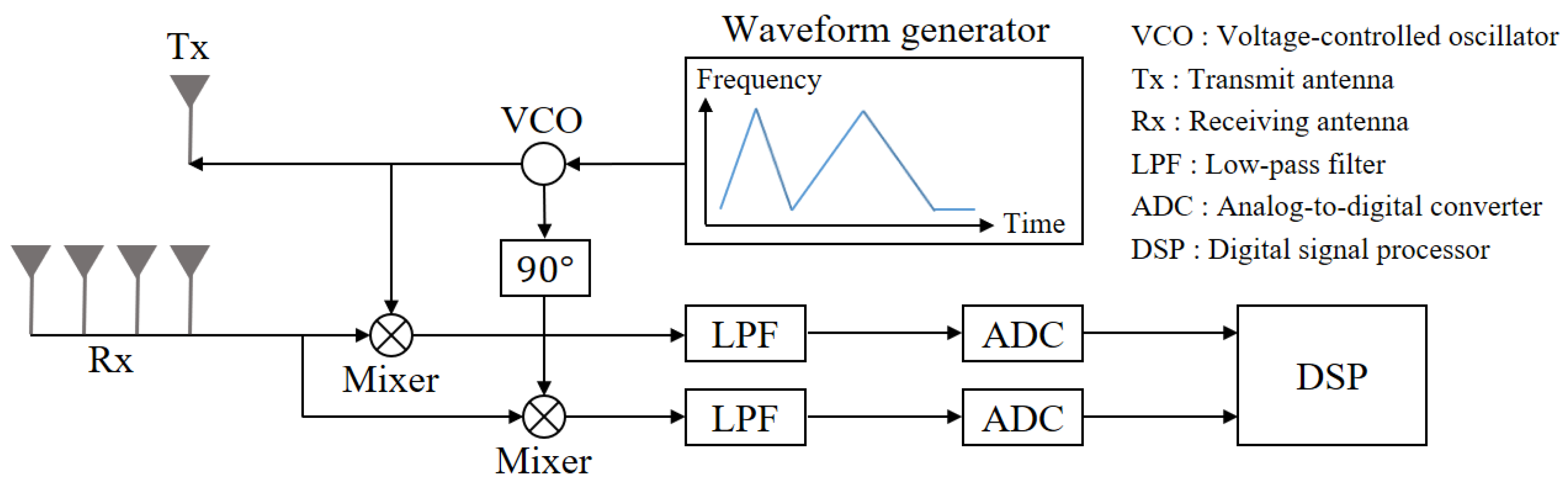
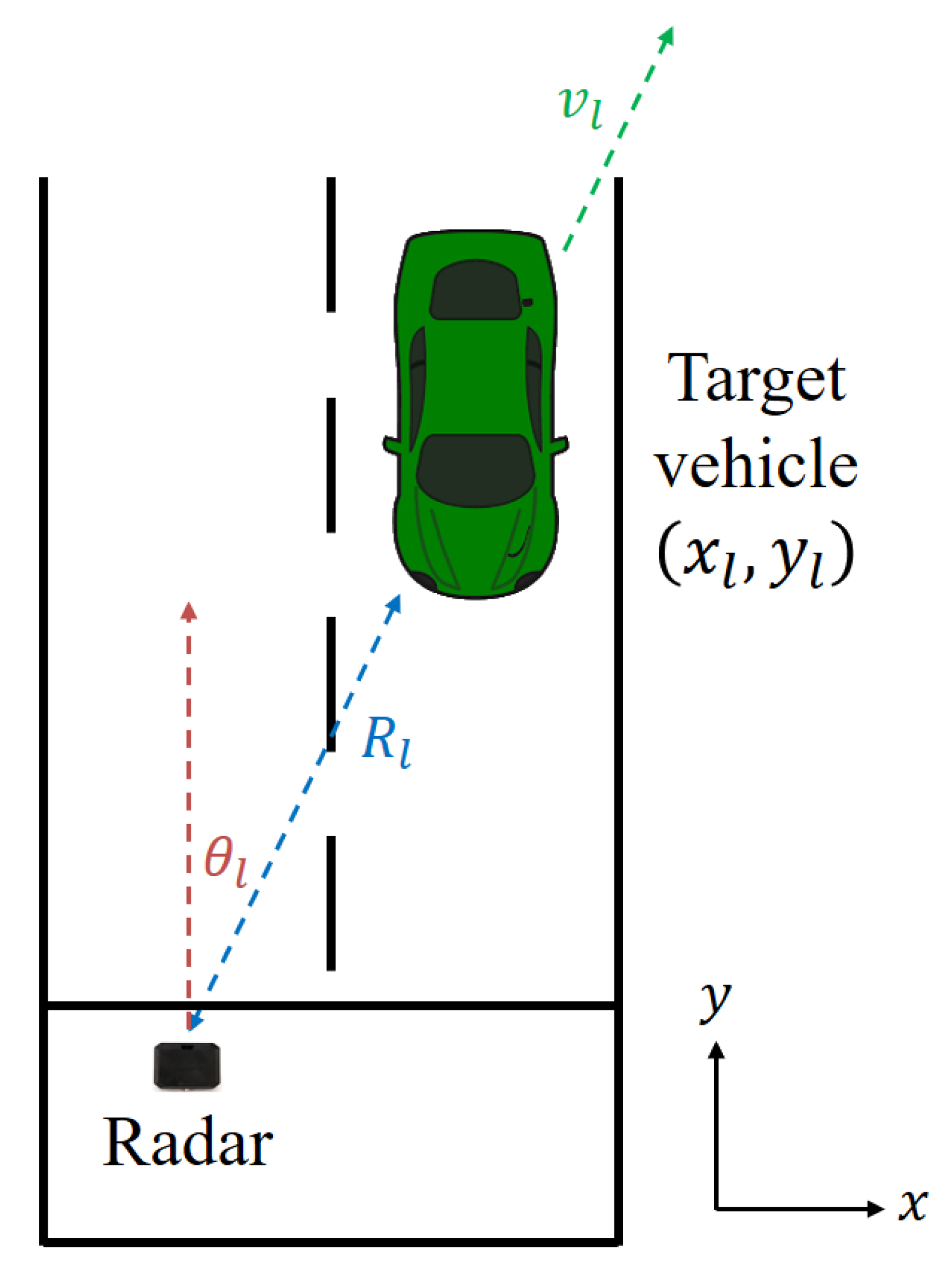
2.1. Traffic Monitoring Radar
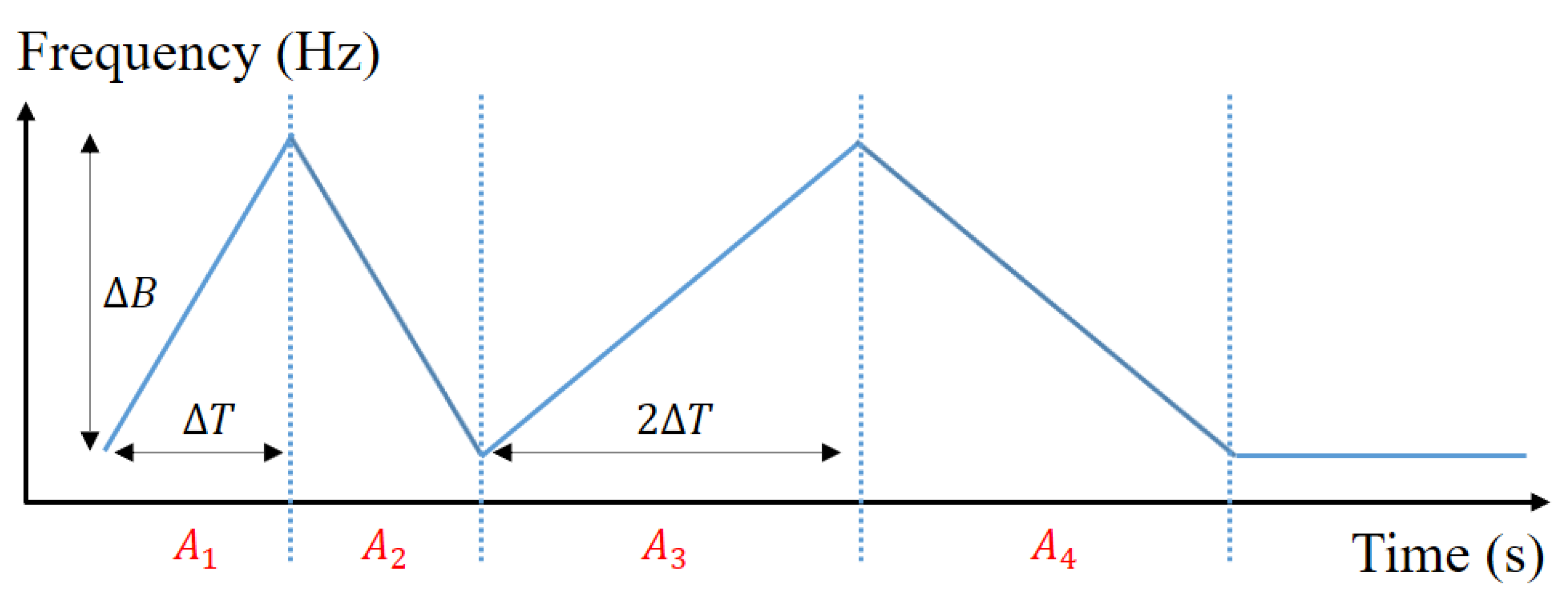
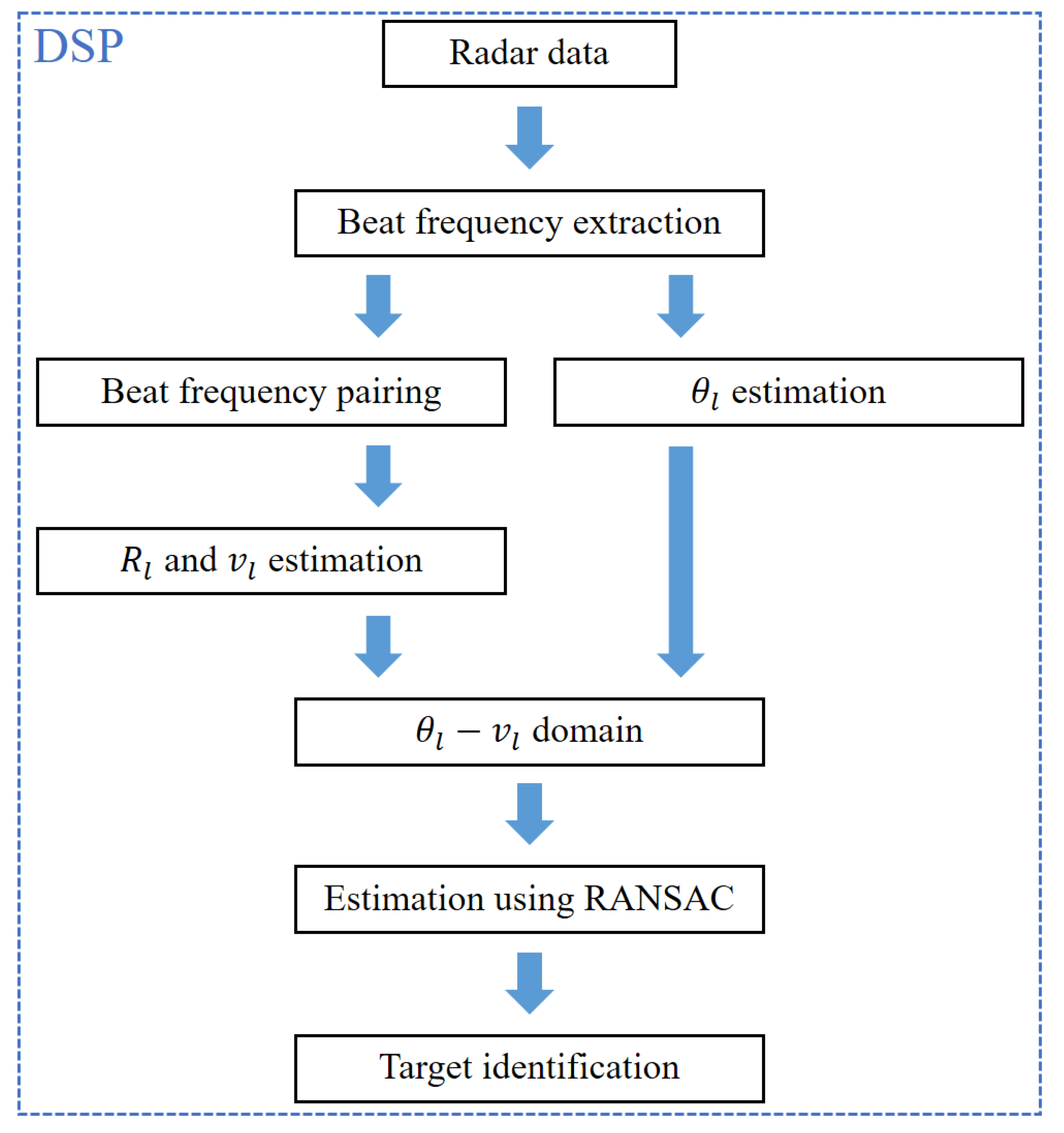
2.2. Radar Signal Processing for Target Information Extraction
3. Signal Measurement and Target Detection Using Traffic Monitoring Radar
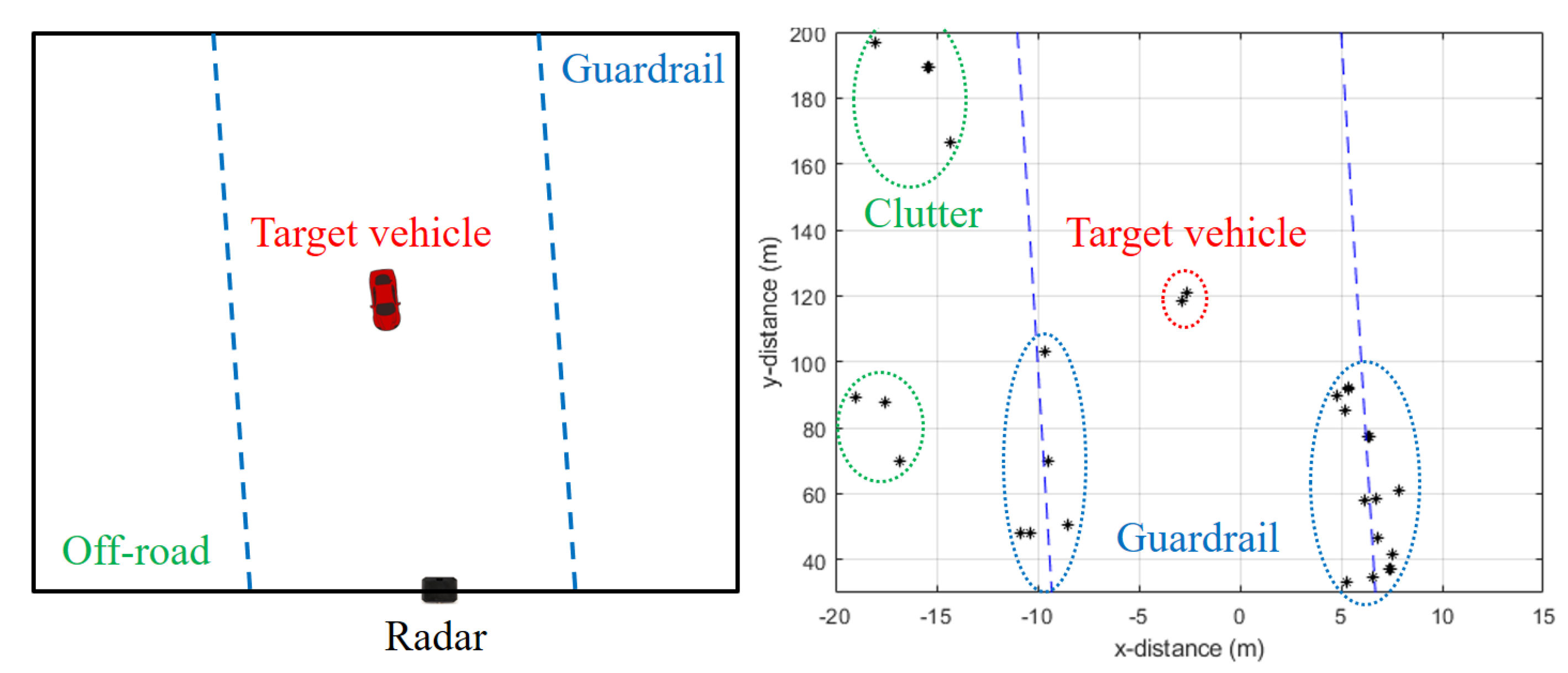
3.1. Measurement Environment
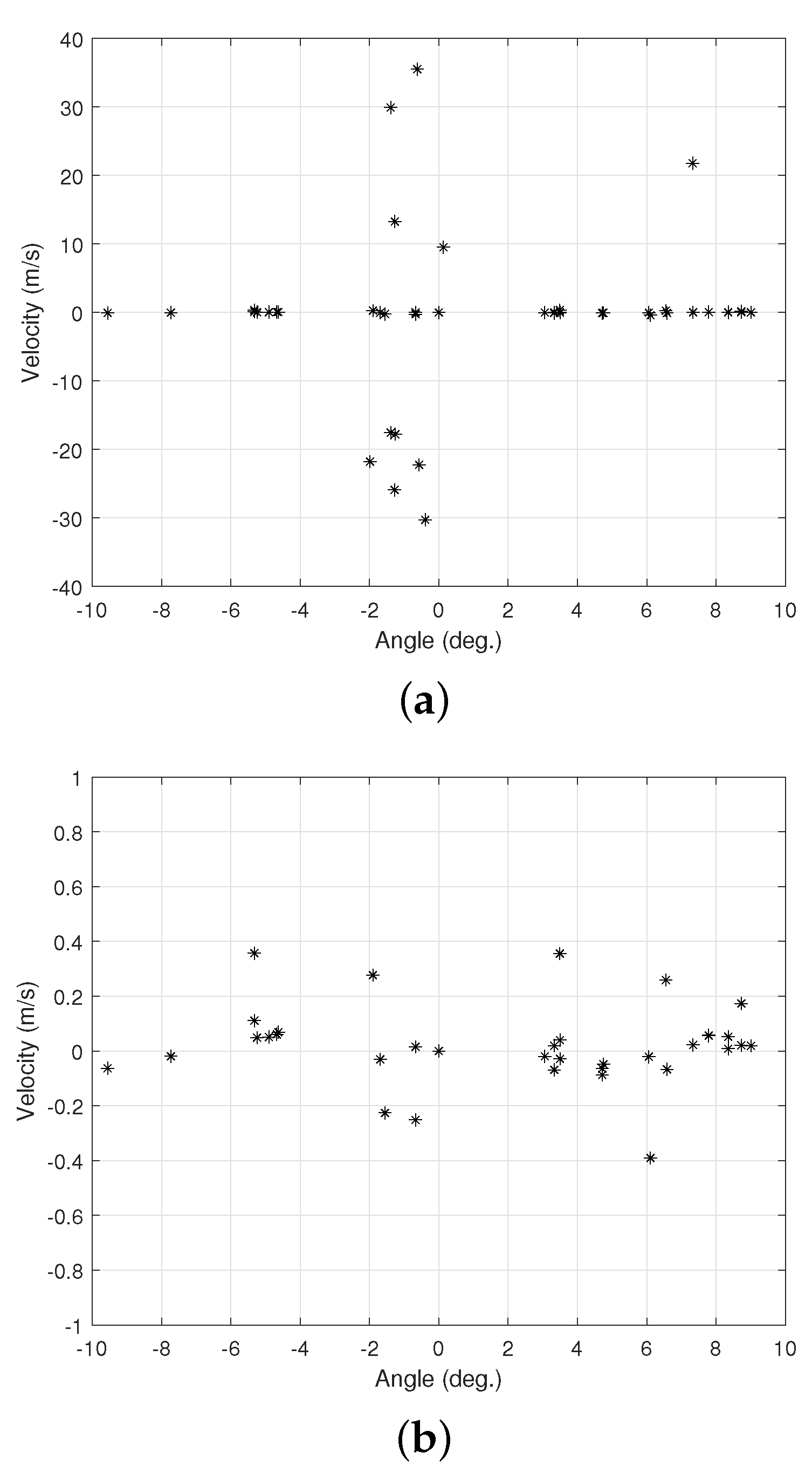
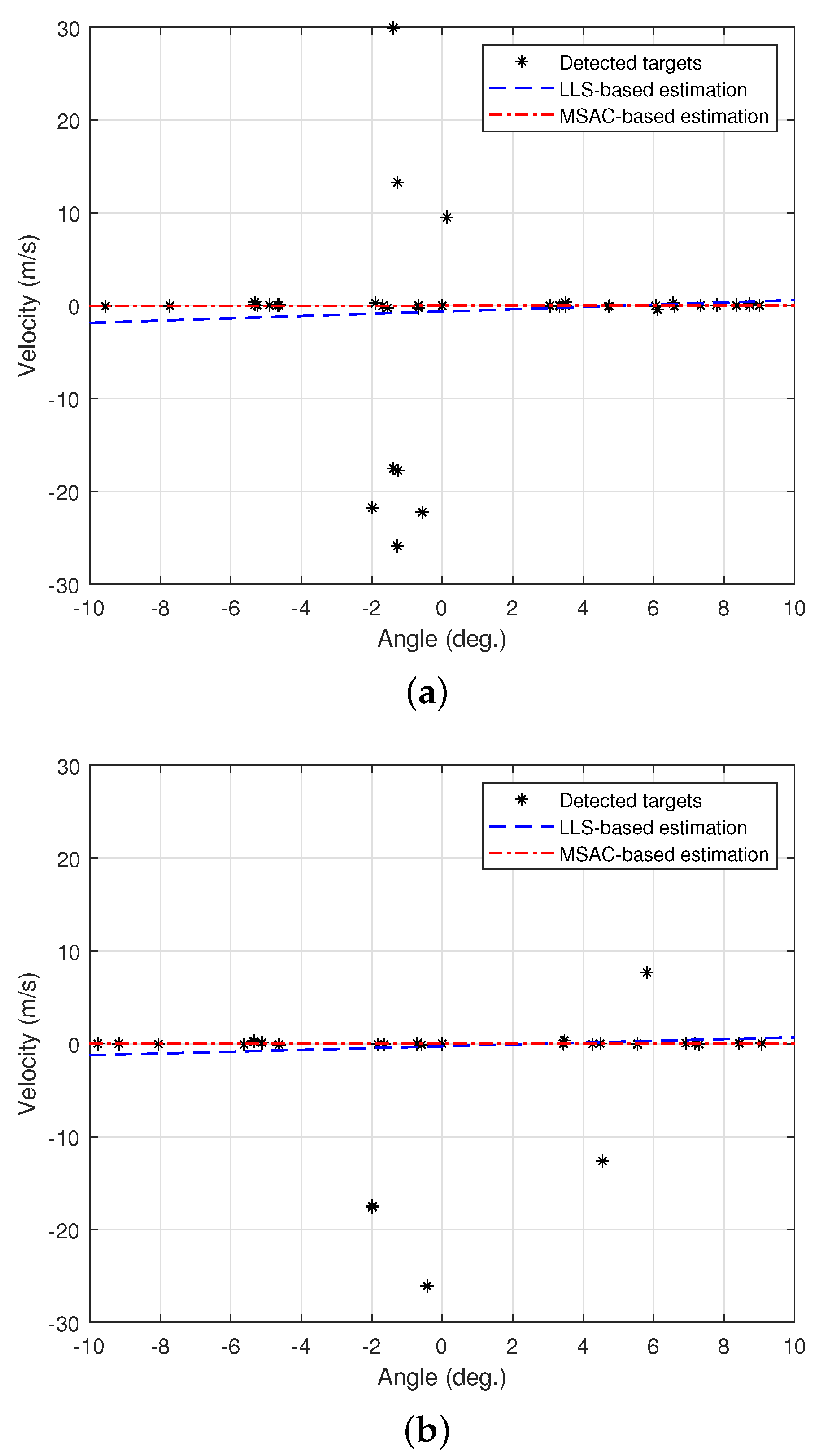
3.2. Detection Results from Radar Signal Processing
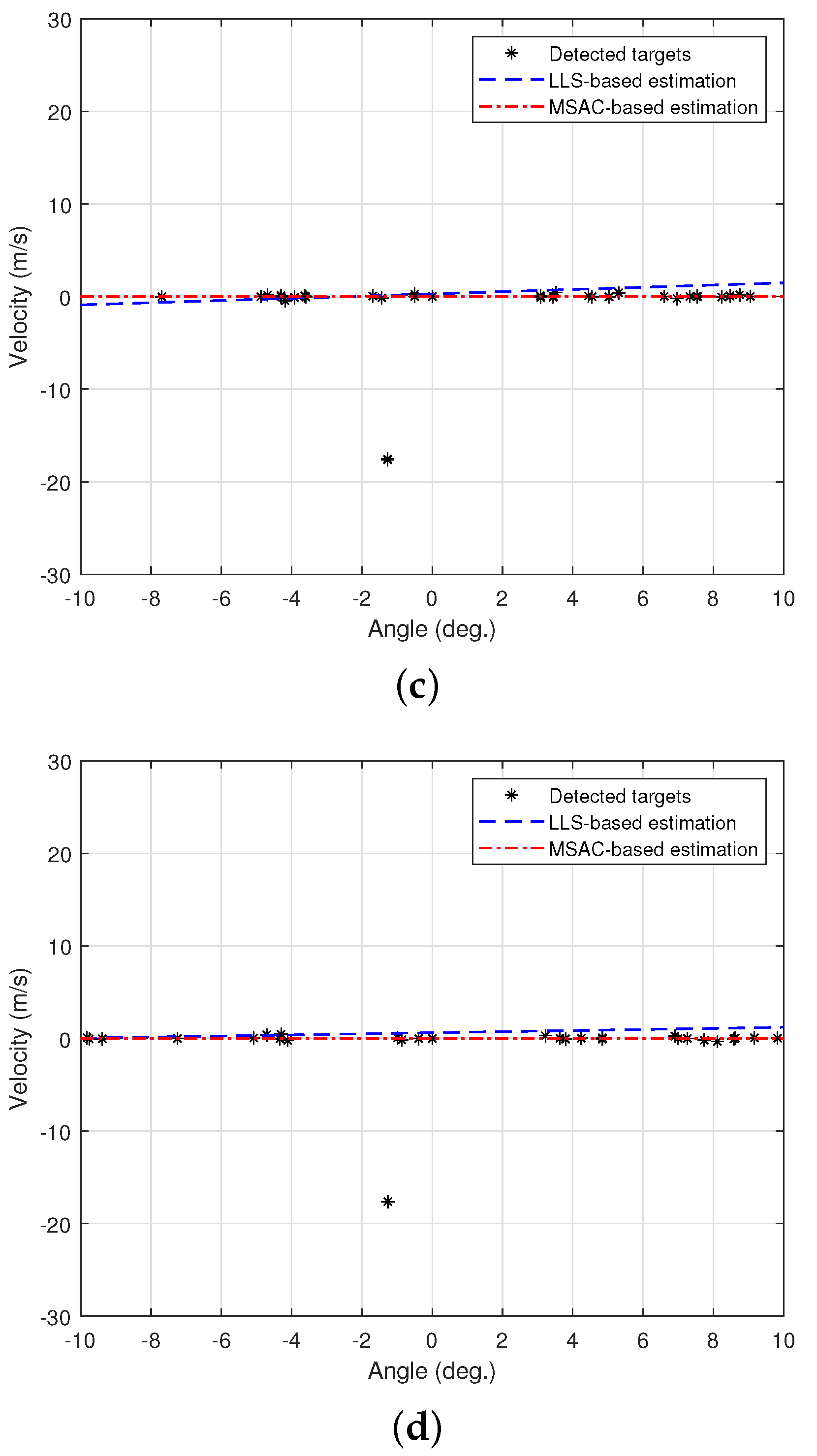
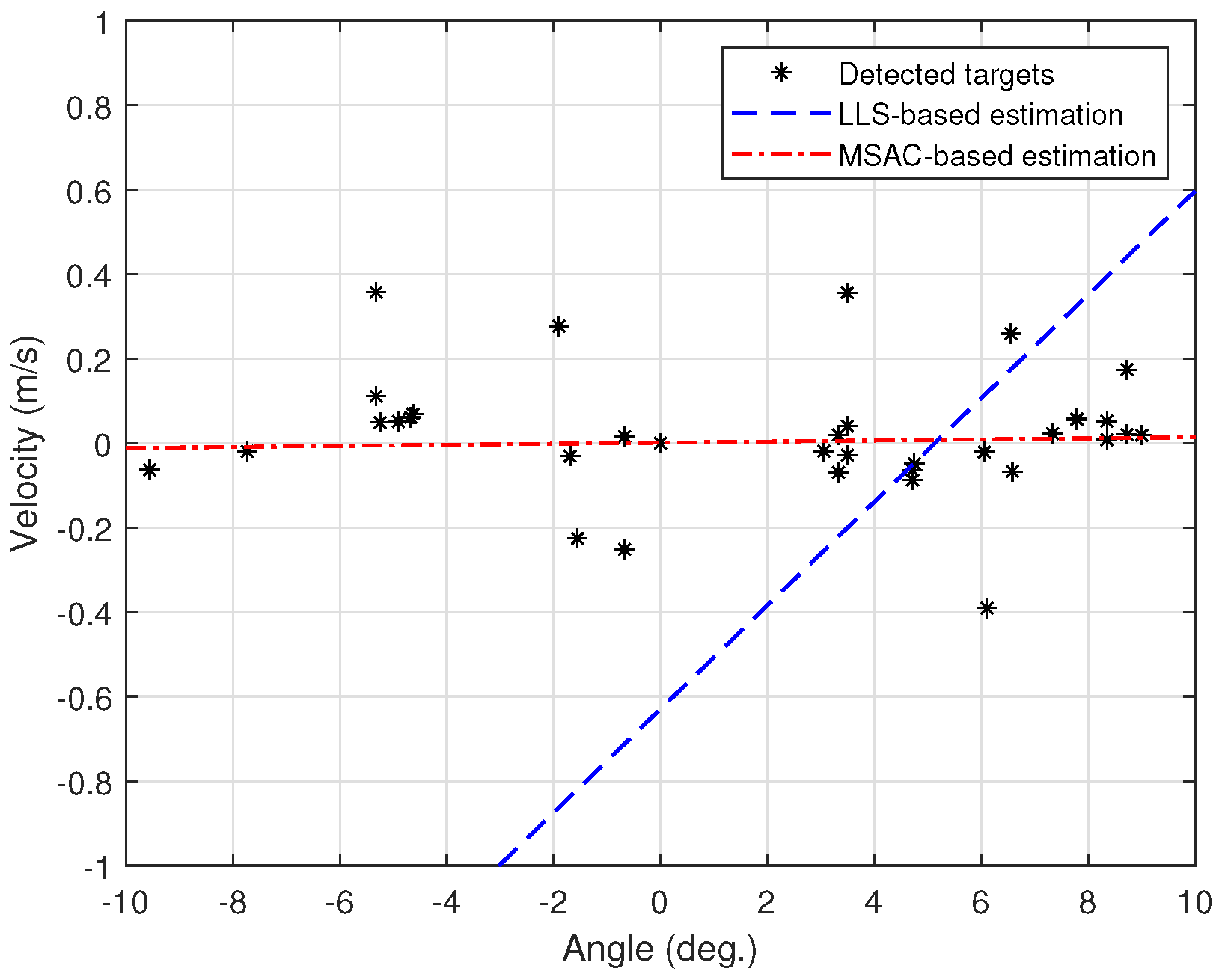
4. Proposed Stationary Target Identification Method
- Several sample points are randomly selected, and model parameters are determined from the selected sample points.
- The number of sample points close to the determined model is counted.
- If the fraction of the number of inliers over the total sample points in the set exceeds a predefined threshold, re-estimate the model parameters using all the identified inliers.
- Otherwise, Steps 1 to 3 are repeated again.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ADC | Analog-to-digital converter |
| DSP | Digital signal processor |
| FMCW | Frequency-modulated continuous wave |
| FOV | Field of view |
| GSM | Global System for Mobile Communications |
| ITS | Intelligent transportation system |
| LLS | Linear least squares |
| LPF | Low-pass filter |
| MSAC | M-estimator sample and consensus |
| RANSAC | Random sample consensus |
| RCS | Radar cross-section |
| VCO | Voltage-controlled oscillator |
References
- Cheng, H.-Y. Camera placement based on vehicle traffic for better city security surveillance. IEEE Intell. Syst. 2018, 33, 49–61. [Google Scholar]
- Ma, X.; He, Y.; Luo, X.; Li, J.; Zhao, M.; An, B.; Guan, X. Highway traffic flow estimation for surveillance scenes damaged by rain. IEEE Intell. Syst. 2018, 33, 64–77. [Google Scholar]
- Ho, G.T.S.; Tsang, Y.P.; Wu, C.H.; Wong, W.H.; Choy, K.L. A computer vision-based roadside occupation surveillance system for intelligent transport in smart cities. Sensors 2019, 19, 1796. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Samczynski, P.; Kulpa, K.; Malanowski, M.; Krysik, P.; Maślikowski, Ł. A concept of GSM-based passive radar for vehicle traffic monitoring. In Proceedings of the Microwaves, Radar and Remote Sensing Symposium, Kiev, Ukraine, 25–27 August 2011. [Google Scholar]
- Krysik, P.; Kulpa, K.; Baczyk, M.; Maślikowski, Ł.; Samczynski, P. Ground moving vehicles velocity monitoring using a GSM based passive bistatic radar. In Proceedings of the 2011 IEEE CIE International Conference on Radar, Chengdu, China, 24–27 October 2011. [Google Scholar]
- Felguera-Martín, D.; González-Partida, J.-T.; Almorox-González, P.; Burgos-García, M. Vehicular traffic surveillance and road lane detection using radar interferometry. IEEE Trans. Veh. Technol. 2012, 61, 959–970. [Google Scholar] [CrossRef] [Green Version]
- Gómez-del-Hoyo, P.; Bárcena-Humanes, J.L.; Mata-Moya, D.; Juara-Casero, D.; Jiménez-de-Lucas, V. Passive radars as low environmental impact solutions for smart cities traffic monitoring. In Proceedings of the International Conference on Computer as a Tool (EUROCON), Salamanca, Spain, 8–11 September 2015. [Google Scholar]
- Cao, L.; Wang, T.; Wang, D.; Du, K.; Liu, Y.; Fu, C. Lane determination of vehicles based on a novel clustering algorithm for intelligent traffic monitoring. IEEE Access 2020, 8, 3892–3901. [Google Scholar] [CrossRef]
- Lee, H.-B.; Lee, J.-E.; Lim, H.-S.; Jeong, S.-H.; Kim, S.-C. Clutter suppression method of iron tunnel using cepstral analysis for automotive radars. IEICE Trans. Commun. 2017, E100-B, 400–406. [Google Scholar] [CrossRef]
- Yoon, J.; Lee, S.; Lim, S.; Kim, S.-C. High-density clutter recognition and suppression for automotive radar systems. IEEE Access 2019, 7, 58368–58380. [Google Scholar] [CrossRef]
- Lee, S.; Yoon, Y.-J.; Yoon, J.; Sim, H.; Kim, S.-C. Periodic clutter suppression in iron road structures for automotive radar systems. IET Radar Sonar Navig. 2018, 12, 1146–1153. [Google Scholar] [CrossRef]
- Song, H.; Shin, H.-C. Classification and spectral mapping of stationary and moving objects in road environments using FMCW radar. IEEE Access 2020, 8, 22955–22963. [Google Scholar] [CrossRef]
- Torr, P.H.S.; Zisserman, A. MLESAC: A new robust estimator with application to estimating image geometry. Comput. Vis. Image Underst. 2000, 78, 138–156. [Google Scholar] [CrossRef] [Green Version]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Bitsensing Inc., ATM210. Available online: http://bitsensing.com/pdf/200526/Technical_Specification_AIR_Traffic_Radar_1.0.pdf (accessed on 25 June 2020).
- Rohling, H.; Meinecke, M.-M. Waveform design principles for automotive radar systems. In Proceedings of the CIE International Conference on Radar Proceedings, Beijing, China, 15–18 October 2001. [Google Scholar]
- Winkler, V. Range Doppler detection for automotive FMCW radars. In Proceedings of the European Radar Conference, Munich, Germany, 9–12 October 2007. [Google Scholar]
- Krim, H.; Viberg, M. Two decades of array signal processing research: The parametric approach. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar] [CrossRef]
- Patole, S.M.; Torla, M.; Wang, D.; Ali, M. Automotive radars: A review of signal processing techniques. IEEE Signal Process. Mag. 2017, 34, 22–35. [Google Scholar] [CrossRef]
- Gross, F. Smart Antennas for Wireless Communications; McGraw-Hill: New York, NY, USA, 2005. [Google Scholar]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; Yoon, Y.-J.; Kang, S.; Lee, J.-E.; Kim, S.-C. Enhanced performance of MUSIC algorithm using spatial interpolation in automotive FMCW radar systems. IEICE Trans. Commun. 2018, E101-B, 163–175. [Google Scholar] [CrossRef]
- Kang, S.; Lee, S.; Lee, J.-E.; Kim, S.-C. Improving the performance of DOA estimation using virtual antenna in automotive radar. IEICE Trans. Commun. 2017, E100-B, 771–778. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Chen, H.; Meer, P. Robust regression with projection based M-estimators. In Proceedings of the Ninth IEEE International Conference on Computer Vision, Nice, France, 13–16 October 2003. [Google Scholar]
- Choi, S.; Kim, T.; Yu, W. Performance evaluation of RANSAC family. In Proceedings of the British Machine Vision Conference, London, UK, 7–10 September 2009. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters of Our Radar System | Parameter Values |
|---|---|
| Center frequency, | 24.15 GHz |
| Bandwidth, | 200 MHz |
| Detectable range | 2 to 300 m |
| Range resolution | 80 cm |
| Detectable velocity | −250 to 250 km/h |
| Velocity resolution | 1.2 m/s |
| Field of view | −15 to 15 |
| Frame time | 33 ms |
| Estimation Methods | Slope of the Trend Line |
|---|---|
| Ideal case (when the velocity is zero) | 0 |
| LLS method | 0.1226 |
| Proposed MSAC-based method | 0.0013 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lim, H.-S.; Lee, J.-E.; Park, H.-M.; Lee, S. Stationary Target Identification in a Traffic Monitoring Radar System. Appl. Sci. 2020, 10, 5838. https://doi.org/10.3390/app10175838
Lim H-S, Lee J-E, Park H-M, Lee S. Stationary Target Identification in a Traffic Monitoring Radar System. Applied Sciences. 2020; 10(17):5838. https://doi.org/10.3390/app10175838
Chicago/Turabian StyleLim, Hae-Seung, Jae-Eun Lee, Hyung-Min Park, and Seongwook Lee. 2020. "Stationary Target Identification in a Traffic Monitoring Radar System" Applied Sciences 10, no. 17: 5838. https://doi.org/10.3390/app10175838