Discriminative Parameter Training of the Extended Particle-Aided Unscented Kalman Filter for Vehicle Localization

Abstract
:1. Introduction
2. The Discriminative Training of the Extended Particle-Aided Unscented Kalman Filter
2.1. PAUKF
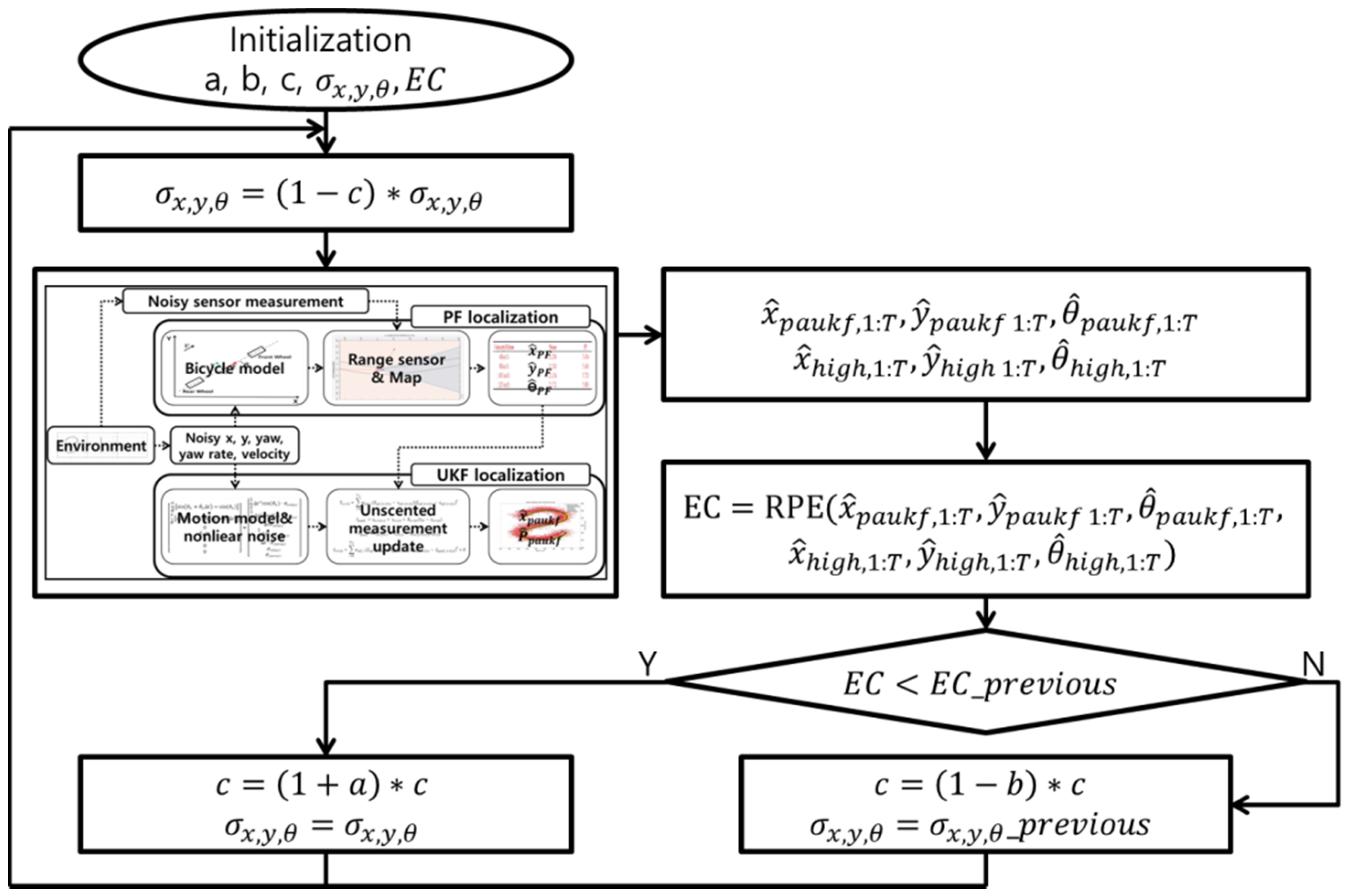
2.2. Discriminative Training of the PAUKF
3. Discriminative Training Environment Settings
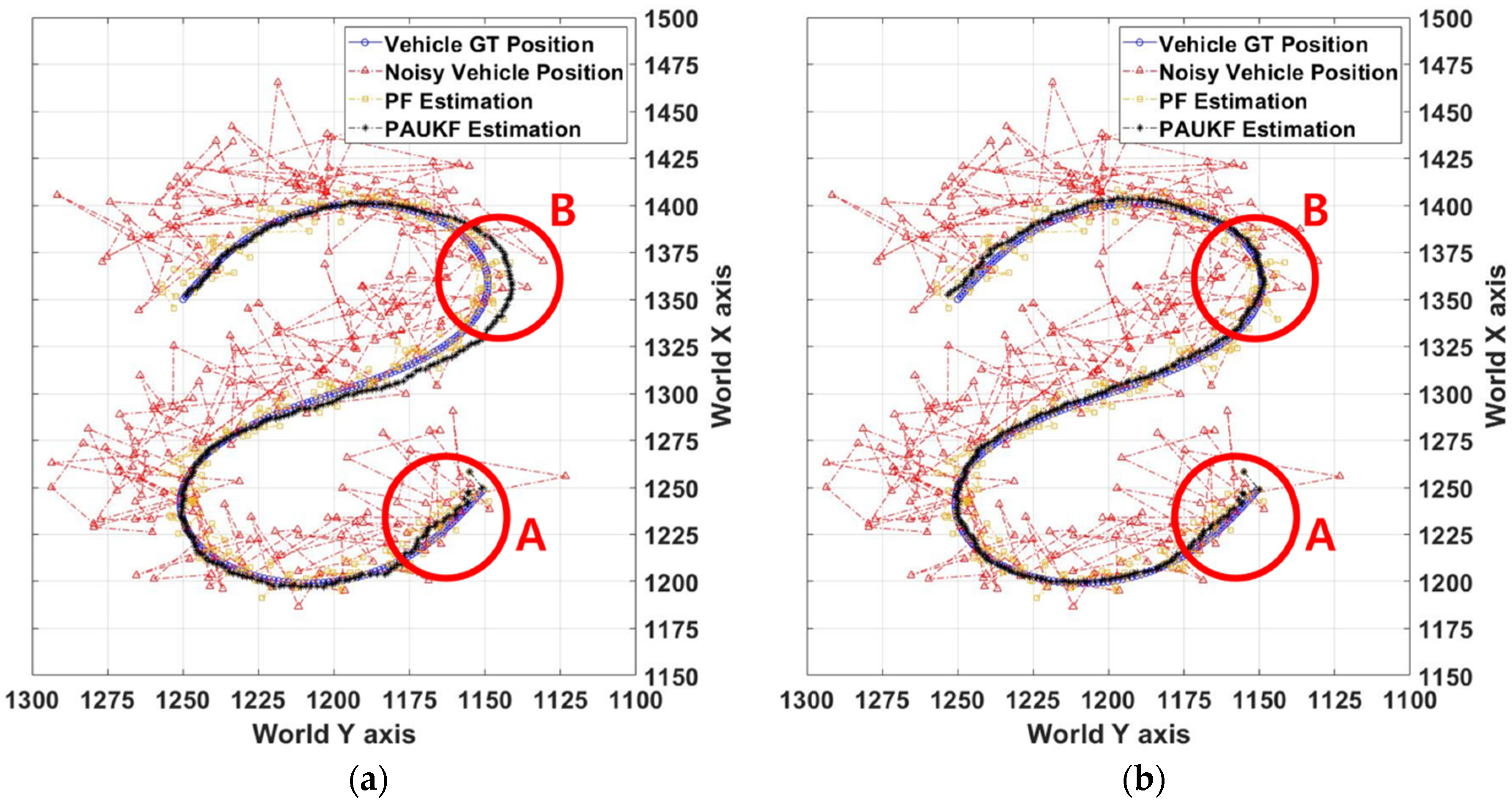
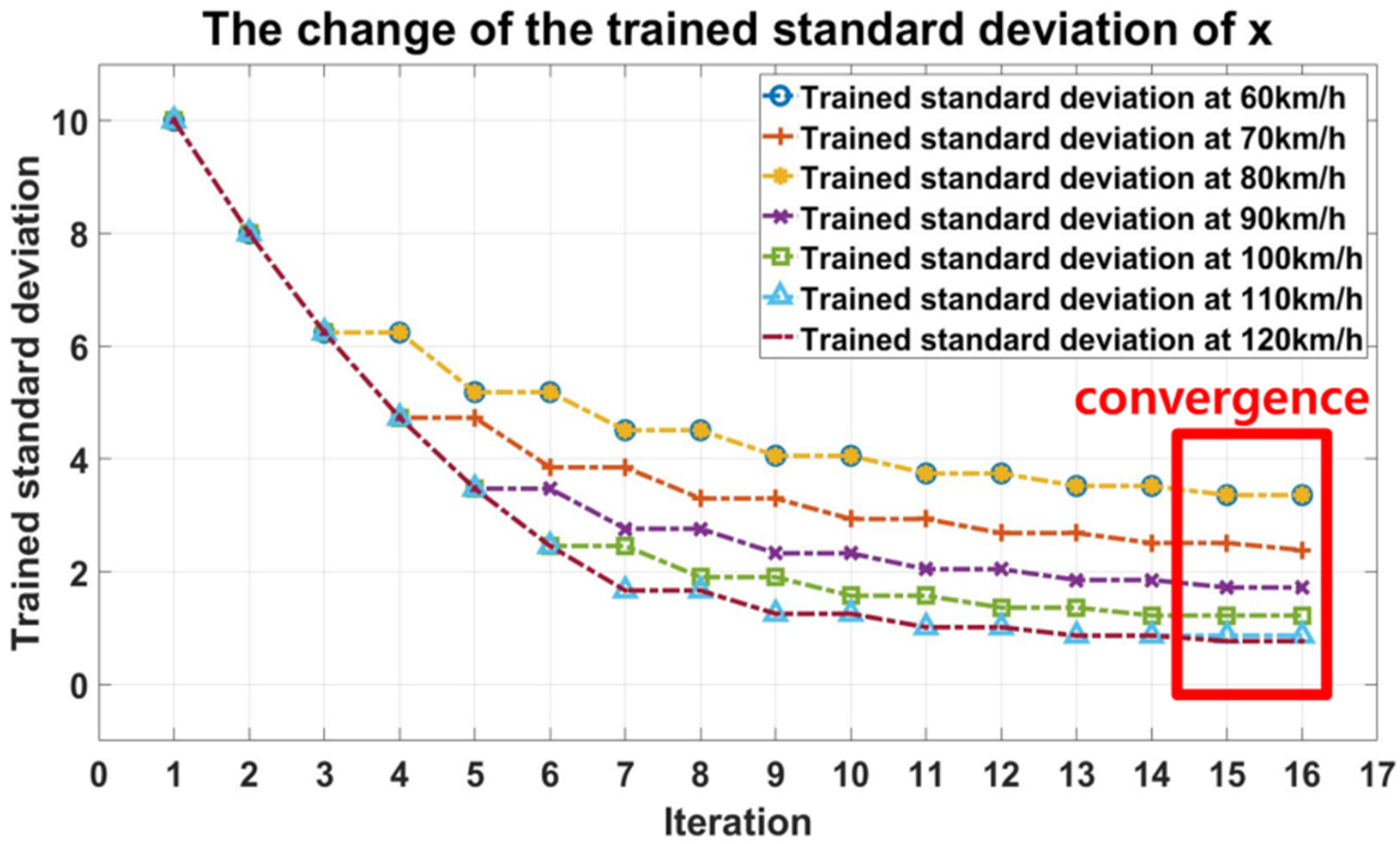
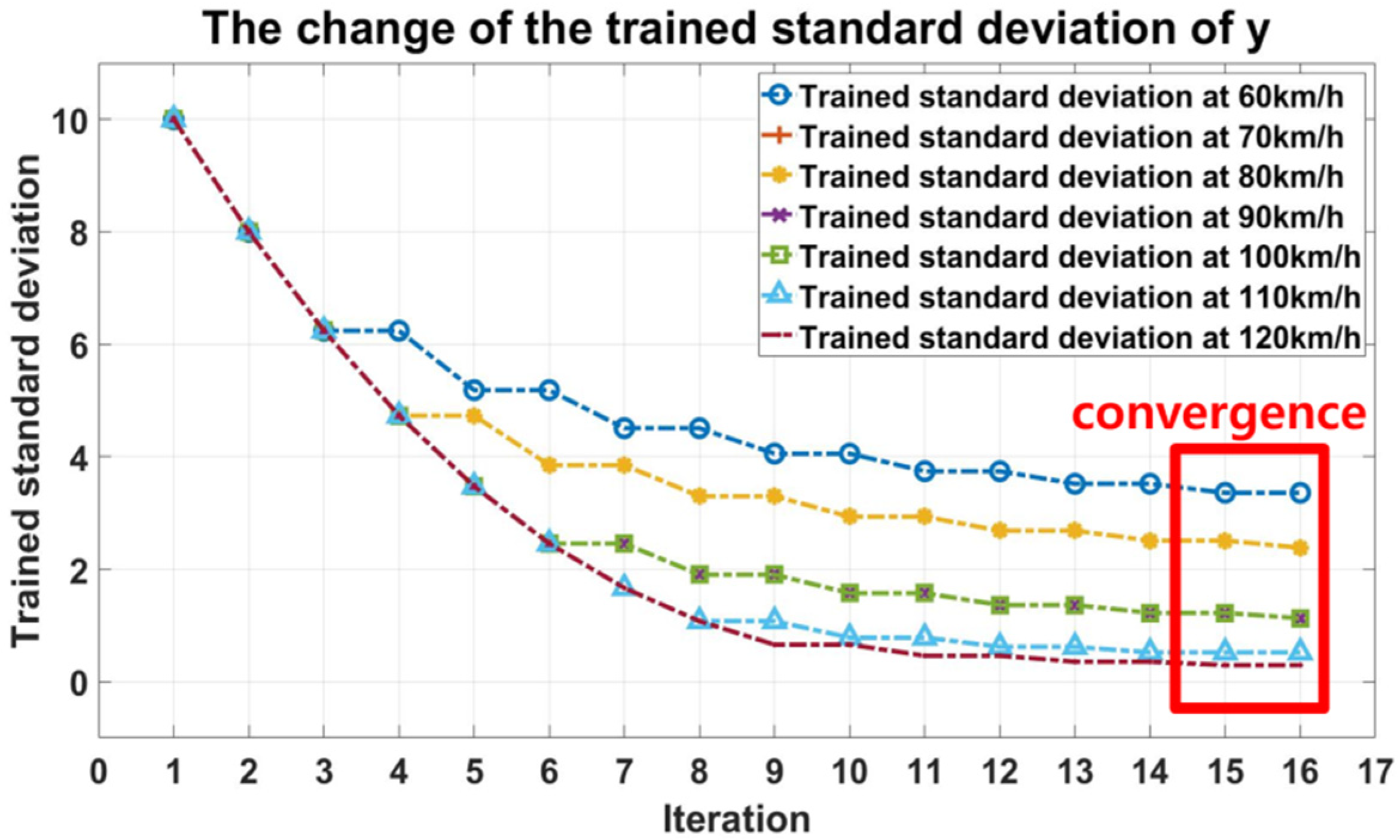
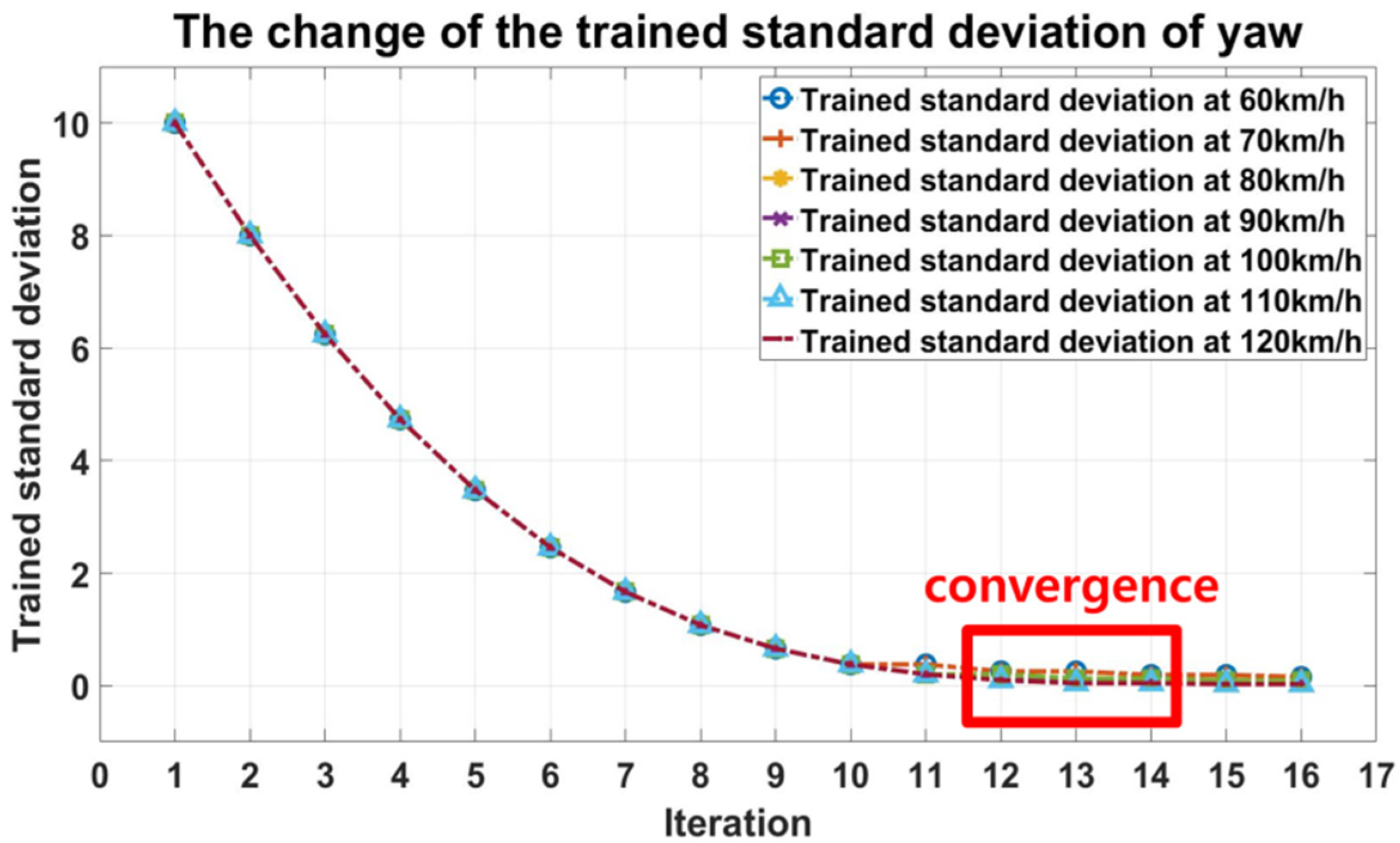
4. The Results of Discriminative Parameter Training of the PAUKF
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| X | State of the vehicle in PF |
| x | Position of the vehicle in the map x-direction |
| y | Position of the vehicle in the map y-direction |
| z | Position of the vehicle in the map z-direction |
| Yaw angle of the vehicle in map coordinate | |
| The standard deviation of vehicle noise in the vertical direction | |
| State at sample time k+1 | |
| Timestamp | |
| Vehicle position in the x dimension at time k | |
| , | Yaw rate of the vehicle at time k |
| Yaw angle of the vehicle at time k | |
| , | Sample time |
| Vertical noise of the vehicle | |
| Distance between feature and vehicle | |
| The relative bearing angle between feature i and vehicle | |
| x, y, z position of the vehicle in map coordinate | |
| The relative distance at x, y, z direction between feature and vehicle | |
| Compound noise of distance measurement | |
| Compound noise of angle measurement | |
| Weights of particle 1, particle 2, … particle i | |
| x, y, z value of the ith particle | |
| Probability when the particle is | |
| Compound standard deviation in x, y, z-direction | |
| , , | The transformed relative distance of feature i and vehicle at x, y, z direction in map coordinate |
| The feature position x, y, z in the pre-saved HD map | |
| N | Number of particles |
| Sigma point design parameter | |
| Quantity of the state vector | |
| State of PAUKF | |
| Yaw rate of vehicle | |
| The state of sigma points | |
| Mean value of sigma points | |
| Augmented state of PAUKF | |
| The noise of vehicle acceleration | |
| The noise of vehicle yaw acceleration | |
| The standard deviation of the noise of vehicle acceleration | |
| Standard deviation of noise in vehicle yaw acceleration | |
| The covariance matrix of PAUKF | |
| Augmented state with sigma points of PAUKF at time k + 1 | |
| Mean value of the augmented state of PAUKF at time k | |
| Number of augmented states | |
| Weight of i th sigma point | |
| Predicted state based on the weight of sigma points and states | |
| Predicted variance based on sigma points and predicted state mean | |
| Measurement noise of PAUKF | |
| Measurement prediction based on sigma points | |
| Sigma points of the state | |
| A | Measurement transition model |
| Predicted measurement based on sigma points and weights | |
| Predicted measurement covariance matrix | |
| The covariance matrix of the measurement noise | |
| The standard deviation of PF estimation in the x dimension | |
| The standard deviation of PF estimation in the y-dimension | |
| Cross-correlation matrix of PAUKF | |
| The Kalman gain of PAUKF | |
| Final state estimation of PAUKF | |
| Final state variance matrix of PAUKF |
Appendix A
| Order | Process of Extended PAUKF |
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 | |
| 7 | |
| 8 | |
| 9 | |
| 10 | |
| 11 | |
| 12 | |
| 13 | |
| 14 | |
| 15 | |
| 16 | |
| 17 | |
| 18 | , when i = 0 |
| 19 | , when i = 1…, |
| 20 | , |
| 21 | |
| 22 | |
| 23 | , |
| 24 | |
| 25 | . |
| 26 | |
| 27 | . |
| 28 | |
| 29 | . |
| 30 | . |
| 31 | . |
References
- Rezaei, S.; Sengupta, R. Kalman filter-based integration of DGPS and vehicle sensors for localization. IEEE Trans. Control Syst. Technol. 2007, 15, 1080–1088. [Google Scholar] [CrossRef] [Green Version]
- Bakkali, W.; Kieffer, M.; Lalam, M.; Lestable, T. Kalman filter-based localization for Internet of Things LoRaWANTM End Points. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, PIMRC, Montreal, QC, Canada, 8–13 October 2017; pp. 1–6. [Google Scholar]
- Yang, Q.; Taylor, D.G.; Durgin, G.D. Kalman filter based localization and tracking estimation for HIMR RFID systems. In Proceedings of the 12th Annual IEEE International Conference on RFID, RFID 2018, Orlando, FL, USA, 10–12 April 2018; pp. 1–5. [Google Scholar]
- Cong, T.H.; Kim, Y.J.; Lim, M.T. Hybrid Extended Kalman Filter-based localization with a highly accurate odometry model of a mobile robot. In Proceedings of the 2008 International Conference on Control, Automation and Systems, ICCAS 2008, Seoul, Korea, 14–17 October 2008; pp. 738–743. [Google Scholar]
- Lu, J.; Li, C.; Su, W. Extended Kalman filter based localization for a mobile robot team. In Proceedings of the Proceedings of the 28th Chinese Control and Decision Conference, CCDC 2016, Yinchuan, China, 28–30 May 2016; pp. 939–944. [Google Scholar]
- Reina, G.; Vargas, A.; Nagatani, K.; Yoshida, K. Adaptive Kalman filtering for GPS-based mobile robot localization. In Proceedings of the SSRR2007—IEEE International Workshop on Safety, Security and Rescue Robotics Proceedings, Rome, Italy, 27–29 September 2007. [Google Scholar]
- Subhan, F.; Hasbullah, H.; Ashraf, K. Kalman filter-based hybrid indoor position estimation technique in bluetooth networks. Int. J. Navig. Obs. 2013, 2013, 570964. [Google Scholar] [CrossRef] [Green Version]
- Ullah, I.; Shen, Y.; Su, X.; Esposito, C.; Choi, C. A Localization Based on Unscented Kalman Filter and Particle Filter Localization Algorithms. IEEE Access 2020, 8, 2233–2246. [Google Scholar] [CrossRef]
- Chen, S.Y. Kalman filter for robot vision: A survey. IEEE Trans. Ind. Electron. 2012, 59, 4409–4420. [Google Scholar] [CrossRef]
- Pomarico-Franquiz, J.J.; Shmaliy, Y.S. Accurate self-localization in rfid tag information grids using fir filtering. IEEE Trans. Ind. Inform. 2014, 10, 1317–1326. [Google Scholar] [CrossRef]
- Loebis, D.; Sutton, R.; Chudley, J.; Naeem, W. Adaptive tuning of a Kalman filter via fuzzy logic for an intelligent AUV navigation system. Control Eng. Pract. 2004, 12, 1531–1539. [Google Scholar] [CrossRef]
- Chung, H.Y.; Hou, C.C.; Chen, Y.S. Indoor Intelligent Mobile Robot Localization Using Fuzzy Compensation and Kalman Filter to Fuse the Data of Gyroscope and Magnetometer. IEEE Trans. Ind. Electron. 2015, 62, 6436–6447. [Google Scholar] [CrossRef]
- Krishnan, R.G.; Shalit, U.; Sontag, D. Deep Kalman Filters. In Proceedings of the NIPS 2016 Workshop: Advances in Approximate Bayesian Inference, Barcelona, Spain, 9 December 2016; pp. 1–7. [Google Scholar]
- Hosseinyalamdary, S. Deep Kalman filter: Simultaneous multi-sensor integration and modelling; A GNSS/IMU case study. Sensors 2018, 18, 1316. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lin, M.; Yoon, J.; Kim, B. Self-Driving Car Location Estimation Based on a Particle-Aided Unscented Kalman Filter. Sensors 2020, 20, 2544. [Google Scholar] [CrossRef] [PubMed]
- Lin, M.; Kim, B. Extended Particle-Aided Unscented Kalman Filter Based on Self-Driving Car Localization. Appl. Sci. 2020, 10, 5045. [Google Scholar] [CrossRef]
- Abbeel, P.; Coates, A.; Montemerlo, M.; Ng, A.Y.; Thrun, S. Discriminative training of kalman filters. Robot. Sci. Syst. 2005, 2, 1. [Google Scholar]
- Sakai, A.; Kuroda, Y. Discriminative parameter training of Unscented Kalman Filter. IFAC Proc. Vol. 2010, 43, 677–682. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order | Process |
|---|---|
| 1 | Initialization of hyper-parameters’, , training time |
| 2 | Start training one by one |
| 3 | Calculate the sigma in this iteration |
| 4 | Run the PAUKF in the whole track with the calculated sigma |
| 5 | Save the data from 1:T of the PAUKF and high-performance sensor |
| 6 | Calculate the evaluation criteria based on data collected |
| 7 | Compare the performance change |
| 8 | Change the training parameters a and b based on the performance |
| 9 | Start new training iteration based on the changed training parameters a and b |
| 10 | End the iteration if the training process meets training times |
| 11 | Save the as the final result |
| Parameter Name | Value |
|---|---|
| Random seed | 50 |
| The noise of the high-accuracy sensor | |
| Initial value of | 10 |
| Initial RPE (m) | 9999 |
| Training times | 15 |
| a | 0.1 |
| b | 0.3 |
| Initial c | 0.2 |
| Velocity of vehicle (km/h) | 60, 70, 80, 90, 100, 110, 120 |
| Position of Vehicle | PF | PAUKF | ||||
|---|---|---|---|---|---|---|
| Parameter | Manual | Trained | Manual | Trained | Manual | Trained |
| 60 km/h | 29.465 | 29.465 | 6.317 | 6.317 | 2.478 | 2.651 |
| 70 km/h | 29.351 | 29.351 | 6.238 | 6.238 | 1.767 | 1.510 |
| 80 km/h | 28.319 | 28.319 | 6.265 | 6.265 | 2.303 | 2.645 |
| 90 km/h | 29.919 | 29.919 | 5.861 | 5.861 | 2.169 | 2.270 |
| 100 km/h | 29.981 | 29.981 | 6.324 | 6.324 | 2.833 | 2.166 |
| 110 km/h | 29.144 | 29.144 | 6.303 | 6.303 | 3.441 | 2.574 |
| 120 km/h | 30.072 | 30.072 | 6.098 | 6.098 | 3.881 | 2.093 |
| Mean | 29.465 | 29.465 | 6.201 | 6.201 | 2.696 | 2.273 |
| RMSE Change | 0% | 0% | −15.70% | |||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, M.; Kim, B. Discriminative Parameter Training of the Extended Particle-Aided Unscented Kalman Filter for Vehicle Localization. Appl. Sci. 2020, 10, 6260. https://doi.org/10.3390/app10186260
Lin M, Kim B. Discriminative Parameter Training of the Extended Particle-Aided Unscented Kalman Filter for Vehicle Localization. Applied Sciences. 2020; 10(18):6260. https://doi.org/10.3390/app10186260
Chicago/Turabian StyleLin, Ming, and Byeongwoo Kim. 2020. "Discriminative Parameter Training of the Extended Particle-Aided Unscented Kalman Filter for Vehicle Localization" Applied Sciences 10, no. 18: 6260. https://doi.org/10.3390/app10186260