Extended Particle-Aided Unscented Kalman Filter Based on Self-Driving Car Localization


Abstract
:1. Introduction
2. Extended Particle-Aided Unscented Kalman Filter
2.1. Particle Filter Initialization
2.2. Particle Prediction
2.3. Particle Weight Estimation Based on Three-Dimensional Features
2.4. Resampling Particles
2.5. UKF Part of Extended PAUKF
3. Simulation Environment
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| The standard deviation of vehicle noise in the vertical direction | |
| State at sample time k+1 | |
| Timestamp | |
| Vehicles position in the x dimension at time k | |
| Yaw rate of the vehicle at time k | |
| Yaw angle of the vehicle at time k | |
| Sample time | |
| Vertical noise of the vehicle | |
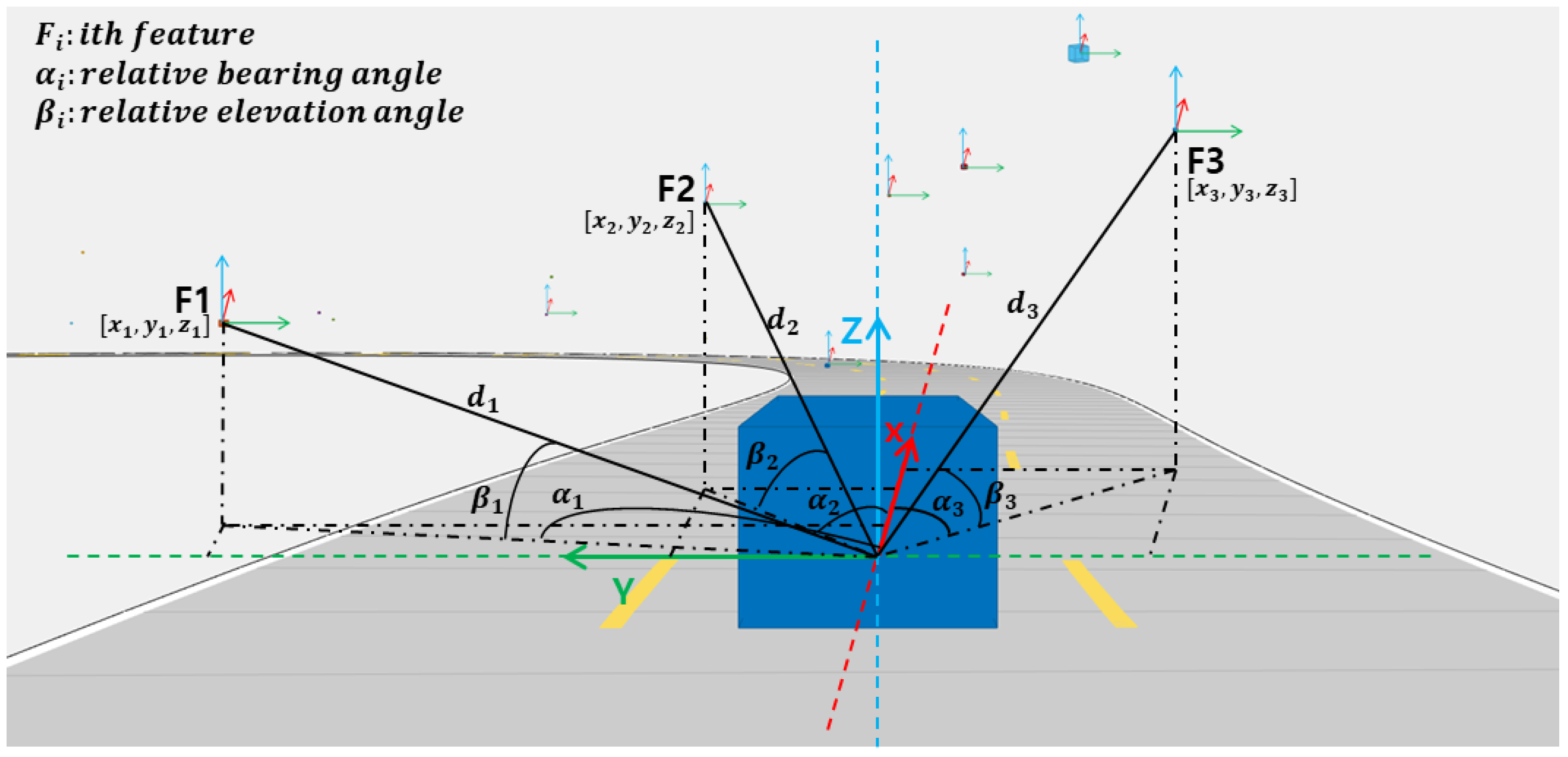
| Distance between feature and vehicle | |
| The relative bearing angle between feature i and vehicle | |
| x, y, z position of the vehicle in map coordinate | |
| Relative distance at x, y, z direction between feature and vehicle. | |
| Compound noise of distance measurement | |
| Compound noise of angle measurement | |
| Weights of particle1, particle 2, … particle i | |
| The x, y, z value of the ith particle | |
| Probability when the particle is | |
| Compound standard deviation in the x, y, z-direction | |
| The transformed relative distance of feature I and vehicle at x, y, z direction in map coordinate | |
| The feature position x, y, z in the pre-saved HD map | |
| N | number of particles |
| The probability of perception based on different sensors | |
| State at time k | |
| Estimation result of the particle filter | |
| Number of augmented states | |
| PAUKF design parameter in the UKF part | |
| Predicted state based on the weight of sigma points and states | |
| A | Measurement transition model of PAUKF in UKF part |
| Predicted measurement based on sigma points and weights | |
| Predicted measurement covariance matrix | |
| Cross-correlation matrix of PAUKF | |
| Variance matrix of the measurement noise | |
| Final state estimation of PAUKF | |
| Final state variance matrix of PAUKF |
References
- Azmat, M.; Kummer, S.; Moura, L.T.; Gennaro, F.D.; Moser, R. Future Outlook of Highway Operations with Implementation of Innovative Technologies Like AV, CV, IoT and Big Data. Logistics 2019, 3, 15. [Google Scholar] [CrossRef] [Green Version]
- Jang, S.W.; Ahn, B. Implementation of detection system for drowsy driving prevention using image recognition and IoT. Sustainability 2020, 12, 3037. [Google Scholar] [CrossRef] [Green Version]
- Wintersberger, S.; Azmat, M.; Kummer, S. Are We Ready to Ride Autonomous Vehicles? A Pilot Study on Austrian Consumers’ Perspective. Logistics 2019, 3, 20. [Google Scholar] [CrossRef] [Green Version]
- Michail, M.; Konstantinos, M.; Biagio, C.; María, A.R.; Christian, T. Assessing the Impact of Connected and Automated Vehicles. A Freeway Scenario; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Rose, C.; Jordan, B.; John, A.; David, B. An integrated vehicle navigation system utilizing lane-detection and lateral position estimation systems in difficult environments for GPS. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2615–2629. [Google Scholar] [CrossRef]
- Kos, T.; Ivan, M.; Josip, P. Effects of multipath reception on GPS positioning performance. In Proceedings of the Elmar—International Symposium Electronics in Marine, Zadar, Croatia, 15–17 September 2010; pp. 399–402. [Google Scholar]
- Larson, K.M.; Braun, J.J.; Small, E.E.; Zavorotny, V.U.; Gutmann, E.D.; Bilich, A.L. GPS Multipath and Its Relation to Near-Surface Soil Moisture Content. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 91–99. [Google Scholar] [CrossRef]
- Meguro, J.I.; Taishi, M.; Jun Ichi, T.; Yoshiharu, A.; Takumi, H. GPS multipath mitigation for urban area using omnidirectional infrared camera. IEEE Trans. Intell. Transp. Syst. 2009, 10, 22–30. [Google Scholar] [CrossRef]
- Ladetto, Q.; Gabaglio, V.; Merminod, B. Two Different Approaches for Augmented GPS Pedestrian Navigation. In Proceedings of the International Symposium on Location Based Services for Cellular Users (Locellus), Munich, Germany, 5–7 February 2001. [Google Scholar]
- Yoneda, K.; Chenxi, Y.; Seiichi, M.; Okuya, T.; Kenji, M. Urban Road Localization by using Multiple Layer Map Matching and Line Segment Matching. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015; pp. 525–530. [Google Scholar]
- Atia, M.M.; Hilal, A.R.; Stellings, C.; Hartwell, E.; Toonstra, J.; Miners, W.B.; Basir, O.A. A Low-Cost Lane-Determination System Using GNSS/IMU Fusion and HMM-Based Multistage Map Matching. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3027–3037. [Google Scholar] [CrossRef]
- Cong, T.H.; Young Joong, K.; Myo Taeg, L. Hybrid Extended Kalman Filter-based localization with a highly accurate odometry model of a mobile robot. In Proceedings of the 2008 International Conference on Control, Automation and Systems, ICCAS 2008, Seoul, Korea, 14–17 October 2008; pp. 738–743. [Google Scholar]
- Huang, S.; Gamini, D. Convergence and consistency analysis for extended Kalman filter based SLAM. IEEE Trans. Robot. 2007, 23, 1036–1049. [Google Scholar] [CrossRef]
- Rezaei, S.; Raja, S. Kalman filter-based integration of DGPS and vehicle sensors for localization. IEEE Trans. Control Syst. Technol. 2007, 15, 1080–1088. [Google Scholar] [CrossRef]
- Ahmad, H.; Toru, N. Extended Kalman filter-based mobile robot localization with intermittent measurements. Syst. Sci. Control Eng. 2013, 1, 113–126. [Google Scholar] [CrossRef]
- Lu, J.; Li, C.; Su, W. Extended Kalman filter based localization for a mobile robot team. In Proceedings of the 28th Chinese Control and Decision Conference, CCDC 2016, Yinchuan, China, 28–30 May 2016; pp. 939–944. [Google Scholar]
- Faisal, M.; Ramdane, H.; Mansour, A.; Khalid, A.-M.; Hassan, M. Robot localization using extended kalman filter with infrared sensor. In Proceedings of the IEEE/ACS International Conference on Computer Systems and Applications, AICCSA, Doha, Qatar, 10–13 November 2014; Volume 2014, pp. 356–360. [Google Scholar]
- St-Pierre, M.; Denis, G. Comparison between the unscented Kalman filter and the extended Kalman filter for the position estimation module of an integrated navigation information system. In Proceedings of the IEEE Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004; pp. 831–835. [Google Scholar]
- Ndjeng, A.N.; Alain, L.; Dominique, G.; Sébastien, G. Experimental comparison of kalman filters for vehicle localization. In Proceedings of the IEEE Intelligent Vehicles Symposium, Xi’an, China, 3–5 June 2009; pp. 441–446. [Google Scholar]
- Zhu, H.; Huosheng, H.; Weihua, G. Adaptive unscented Kalman filter for deep-sea tracked vehicle localization. In Proceedings of the 2009 IEEE International Conference on Information and Automation, ICIA 2009, Zhuhai/Macau, China, 22–24 June 2009; pp. 1056–1061. [Google Scholar]
- Tamimi, H.; Henrik, A.; André, T.; Tom, D.; Andreas, Z. Localization of mobile robots with omnidirectional vision using Particle Filter and iterative SIFT. Robot. Auton. Syst. 2006, 54, 758–765. [Google Scholar] [CrossRef] [Green Version]
- González, J.; Blanco, J.-L.; Cipriano, G.; Ortiz-de-Galisteo, A.; Juan-Antonio, F.-M.; Francisco Angel, M.; Jorge L, M. Mobile robot localization based on Ultra-Wide-Band ranging: A particle filter approach. Robot. Auton. Syst. 2009, 57, 496–507. [Google Scholar] [CrossRef]
- Vlassis, N.; Terwijn, B.; Ben, K. Auxiliary particle filter robot localization from high-dimensional sensor observations. In Proceedings of the IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; Volume 1, pp. 7–12. [Google Scholar]
- Martin, A.; Sen, Z.; Lihua, X. Particle filter based outdoor robot localization using natural features extracted from laser scanners. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; Volume 2, pp. 1493–1498. [Google Scholar]
- Montemerlo, M.; Sebastian, T.; William, W. Conditional Particle Filters for Simultaneous Mobile Robot Localization and People-Tracking. In Proceedings of the IEEE International Conference on Robotics &Automation, Washington, DC, USA, 11–15 May 2002; pp. 695–701. [Google Scholar]
- Lin, M.; Yoon, J.; Kim, B. Self-driving car location estimation based on a particle-aided unscented Kalman filter. Sensors 2020, 20, 2544. [Google Scholar] [CrossRef] [PubMed]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics; MIT Press: Cambridge, UK, 2000. [Google Scholar]
- Ristic, B.; Sanjeev, A.; Neil, G. Beyond the Kalman Filter; Artech House: London, UK; Norwood, MA, USA, 2003. [Google Scholar]
- Minfen, S.; Francis, H.Y.C.; Patch, J.B. A method for generating non-Gaussian noise series with specified probability distribution and power spectrum. In Proceedings of the IEEE International Symposium on Circuits and Systems, Bangkok, Thailand, 25–28 May 2003; Volume 2. [Google Scholar]
- Suhr, J.K.; Jang, J.; Min, D.; Jung, H.G. Sensor Fusion-Based Low-Cost Vehicle Localization System for Complex Urban Environments. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1078–1086. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order | Process |
|---|---|
| 1 | Start one sample time iteration |
| 2 | Initialization particles |
| 3 | For 1 to N do |
| 4 | |
| 5 | End for |
| 6 | For 1 to do |
| 7 | = unscented transform ( |
| 8 | = CTRV model-based state prediction |
| 9 | = A() for measurement prediction |
| 10 | |
| 11 | End one sample time iteration of extended PAUKF |
| Noise Name | Generate Method |
|---|---|
| vehicle x-axis error (m) | |
| vehicle y-axis error (m) | |
| vehicle z-axis error (m) | |
| (m/s) | |
| Yaw error (degree) | |
| Yaw rate error ( | |
| Feature x, y, z error (m) | |
| Feature z position (m) | Random(0,10) |
| Range sensor bearing error (degree) | |
| Range sensor elevation error (degree) | ~ |
| (m) | 5 |
| Random seed | 50 |
| Sample time (s) | 0.05 |
| Position of Vehicle | PF | PAUKF | ||||
|---|---|---|---|---|---|---|
| Basic | Extended | Basic | Extended | Basic | Extended | |
| 60 km/h | 30.426 | 29.465 | 11.057 | 6.317 | 10.199 | 2.478 |
| 70 km/h | 30.176 | 29.351 | 10.973 | 6.238 | 10.314 | 1.767 |
| 80 km/h | 29.883 | 28.319 | 10.989 | 6.265 | 10.458 | 2.303 |
| 90 km/h | 29.025 | 29.919 | 11.052 | 5.861 | 10.627 | 2.169 |
| 100 km/h | 29.349 | 29.981 | 11.094 | 6.324 | 10.893 | 2.833 |
| 110 km/h | 28.365 | 29.144 | 10.851 | 6.303 | 9.751 | 3.441 |
| 120 km/h | 29.932 | 30.072 | 10.999 | 6.098 | 9.826 | 3.881 |
| Mean | 29.571 | 29.465 | 11.002 | 6.201 | 10.295 | 2.696 |
| RMSE Change | −0.36% | −43.64% | −73.81% | |||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, M.; Kim, B. Extended Particle-Aided Unscented Kalman Filter Based on Self-Driving Car Localization. Appl. Sci. 2020, 10, 5045. https://doi.org/10.3390/app10155045
Lin M, Kim B. Extended Particle-Aided Unscented Kalman Filter Based on Self-Driving Car Localization. Applied Sciences. 2020; 10(15):5045. https://doi.org/10.3390/app10155045
Chicago/Turabian StyleLin, Ming, and Byeongwoo Kim. 2020. "Extended Particle-Aided Unscented Kalman Filter Based on Self-Driving Car Localization" Applied Sciences 10, no. 15: 5045. https://doi.org/10.3390/app10155045