Rockfall phenomena are a significant hazard that affects mountain areas [
1,
2,
3]; due to the effects of climate change, they are increasing in frequency [
4]. Rockfall puts at risk the safety of human life and the use of important infrastructures such as roads, railways [
5,
6,
7,
8,
9], connecting municipalities, and touristic areas.
To mitigate this hazard, there are many methods available [
2] (i.e., rockfall barriers, rockfall-shed, embankments, etc.) that differ in terms of their potential energy capacity, the dimensions required for their installation, their costs, and, last but not least, their installation times. The rockfall protection embankment (RPE) typologies are many. Some technological classifications according to the materials used were reported in [
10,
11,
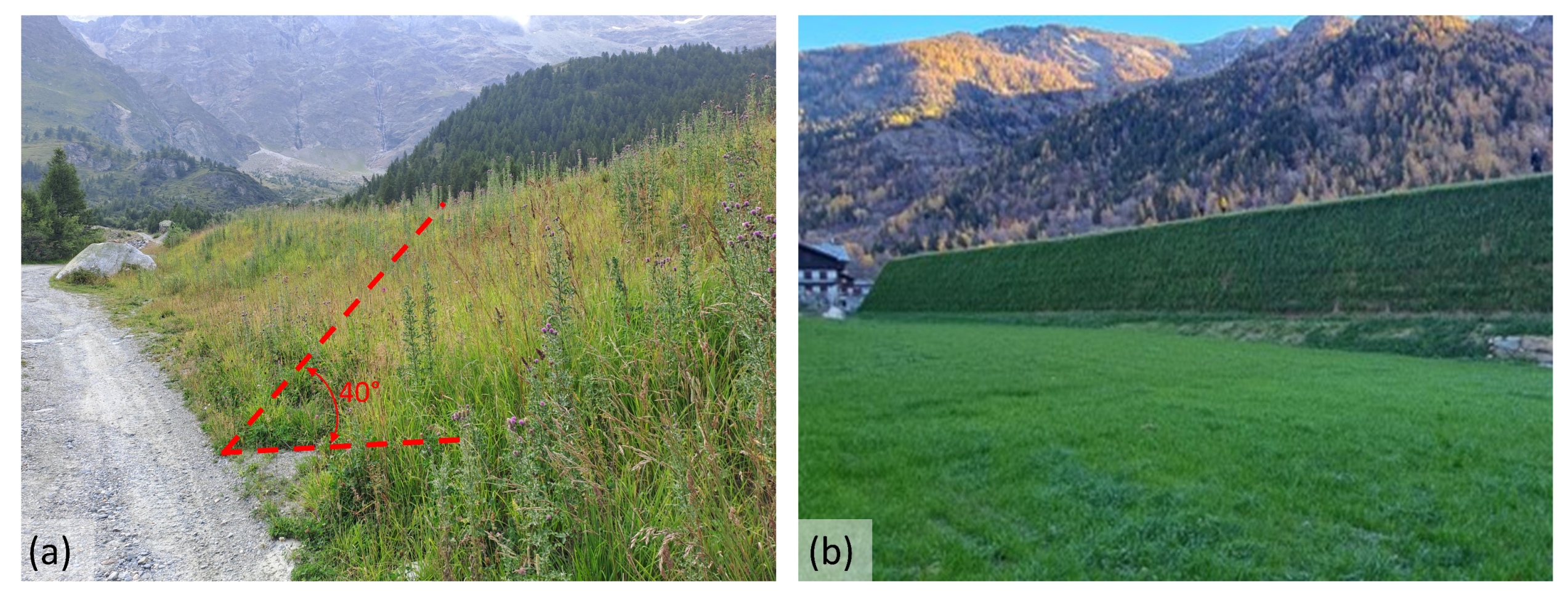
12]. However, the simplest difference can be made between embankments made only of compacted soil and those made of reinforced soil. The first reaches relatively low side slopes of the order of 30°–40°; instead, the seconds are typically made with reinforced high-density polyethylene (HDPE) geogrids or double-twisted wire mesh in order to achieve side slopes of up to 70°. In
Figure 1, two examples are reported.
Numerous applications were widely used in the past, sometimes without a specific design calculation. Until now, limited studies as well as codified design approaches have been developed to achieve this purpose.
The present research provides insights into the behavior of this intervention type when impacted. A review of the current state of the art in the field (Section Literature Analysis) identifies the two primary failure mechanisms of natural-soil RPEs in dynamic conditions. Since experimental approaches are limited due to their costly and challenging nature, the problem is studied by employing a FEM dynamic numerical model (ABAQUS/Explicit). This research aims to develop simplified design tools for the dynamic design of RPEs without the need for complex numerical modeling.
The soil mechanical parameters are calibrated by plate load test (PLT) data (
Section 2.1). To simplify the calibration, a preliminary sensitivity analysis is conducted to determine which parameters have the most significant impact on the results of the RPE impact problem. Only the three most influential parameters were varied in the calibration of the PLTs (
Section 2.1.1); furthermore, a validation of the calibrated soil mechanical parameters was carried out by simulating some triaxial test (
Section 2.1.2). Subsequently, an extensive parametric analysis was implemented to evaluate the influence of the RPE geometry, impact kinetics, and geometric characteristics with respect to the two RPE failure mechanisms (
Section 2.2).
Literature Analysis
Regarding the full-scale tests, most of these were developed on reinforced RPEs [
13,
14,
18,
19,
20,
21,
22,
23].
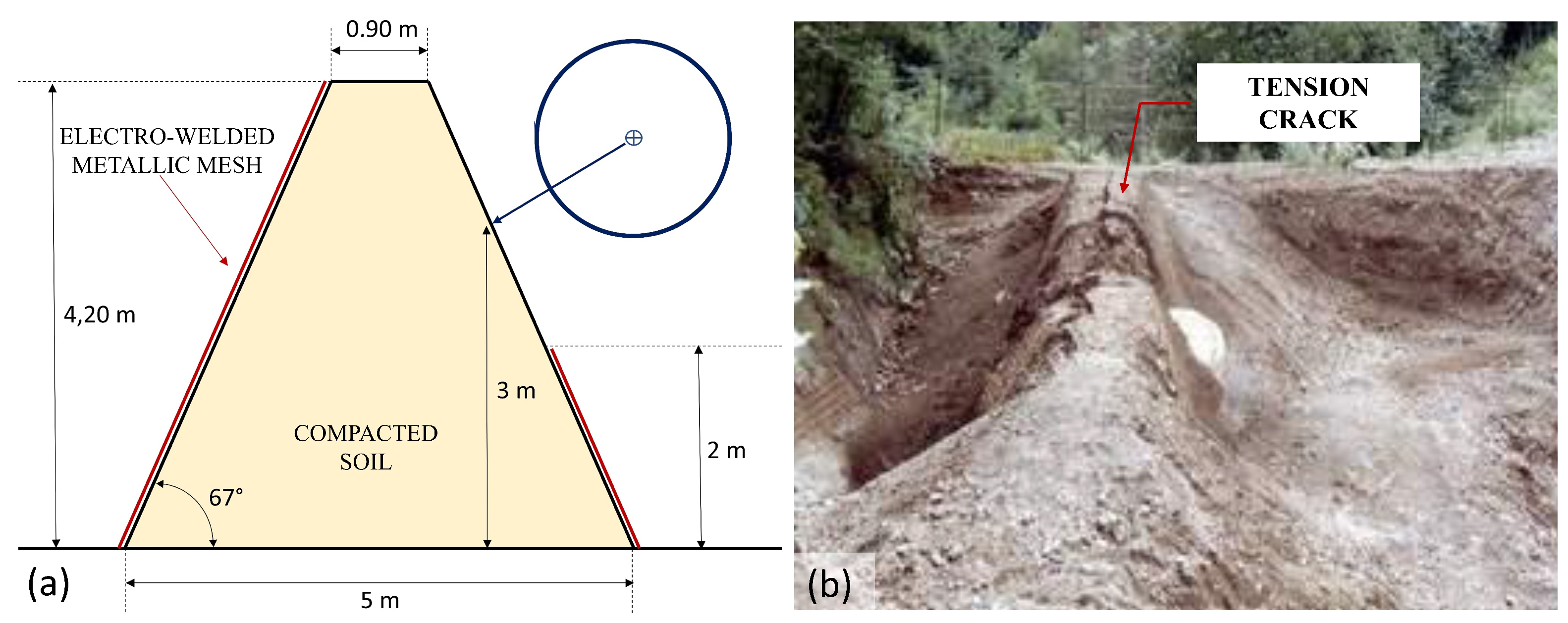
One full-scale test was conducted by Peila et al. (2007) on an RPE in compacted soil with a trapezoidal section and sides of about 67°: this face inclination was obtained using electro-welded metal mesh as a formwork and subsequently removed in the impacted area as shown in
Figure 2. The tested embankment stopped the block but the impact induced the collapse of the structure.
To overcome the costs and technical complexity of full-scale tests [
24], some small-scale tests have been developed. Hofmann and Mölk (2012) [
15] carried out a total of 116 tests in a scale of 1:33, analyzing different embankment typologies: compacted sand-soil, reinforced sand-soil with geogrids, with a rip-rap face and with a damping layer. The impacts block was a 2 kg metal sphere driven in motion with a PVC guide. These test data [
11] are at the basis of the codified design methodology inserted in the Austrian standard ONR 24810 (2021) [
25]. In the standard, the impact by the rockfall is considered an exceptional design situation, and the RPE design only addresses the ultimate limit state. The design situation is determined by the 99th percentile of the kinetic energy distribution (
) obtained from the analysis of the trajectories. According to Lambert and Bourrier [
9], the design methodology falls under the classification of “analytical energy approaches” and requires the definition of the impact disturbed zone (IDZ)—or rather the volume of the RPE exposed to severe loading resulting in large displacements, strains, and changes in the mechanical characteristics [
11].
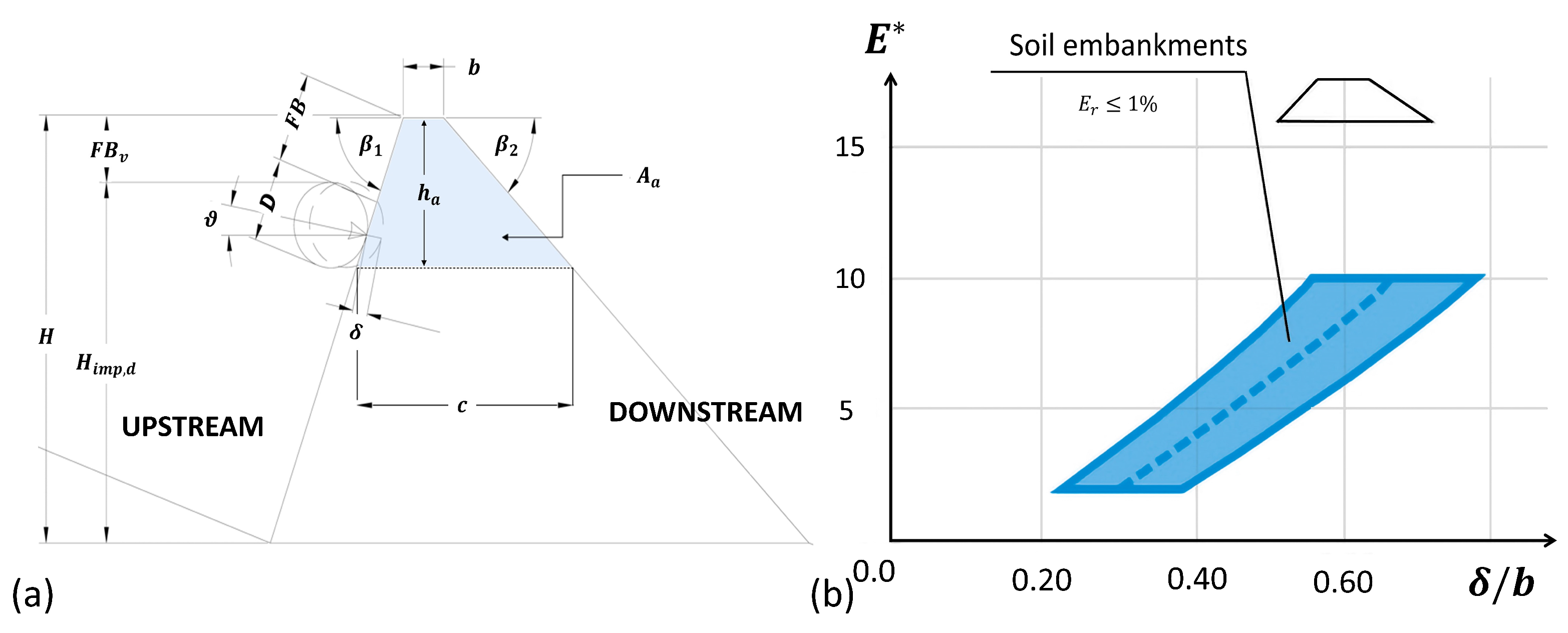
Figure 3a shows how the IDZ section was defined by the reduced-scale tests [
15,
25]. This definition is in agreement with the one proposed by Tissières [
20] and similar to that of Subrin et al. [
26]. The third dimension of the IDZ is the longitudinal distance of RPE affected by the impact: in the case of loose embankments, the authors identified a value between 5 and 6 times the diameter of the block
D [
15]. According to the standard [
25], it is necessary to compute the so-called “dimensionless impact energy”
as defined in Equation (
1) [
25], in which
is the RPE soil density,
is defined according to
Figure 3a,
D is the diameter of the equivalent design block, and
is the activated height. Subsequently, the graph in
Figure 3b allows one to obtain the relationship between the depth of the crater
and the RPE width crest
b.
Finally, the proposed design checks are pseudo-static by applying an equivalent static force
(Equation (
2)) at the impact point and distributed over a length approximately to
, which must be amplified by a safety factor
to obtain the design value
[
25]. Here,
m and
v are, respectively, the mass and velocity of the design block, while
is, according to pulse theory, the impact duration estimable between 0.05 s and 0.15 s for non-reinforced RPEs [
15].
As can be seen in
Figure 3b, the design graph is valid for block rotational energies that are less than 1%; nevertheless, there are no data supporting these limits.
Hofmann and Mölk (2012) [
15] noted that the hazard that the block overcomes by rolling or bouncing the structure is the most critical one in natural soil RPEs and, for this reason, they indicated the minimum free-border
(
Figure 3a) equal to two times the diameter of the sphere for embankments with face inclinations lower than 50°.
Kister (2015) [
27] performed 34 experiments under near-2D conditions with a scale factor
. Most of the tests have rocky side banks (masonry stones) and only five tests concerned the RPE without cover [
27]. The experimental combinations concern three types of impactors with different impact angles, three slope values for the upstream and downstream banks, two types of soil, and different RPE crests values [
11,
27].
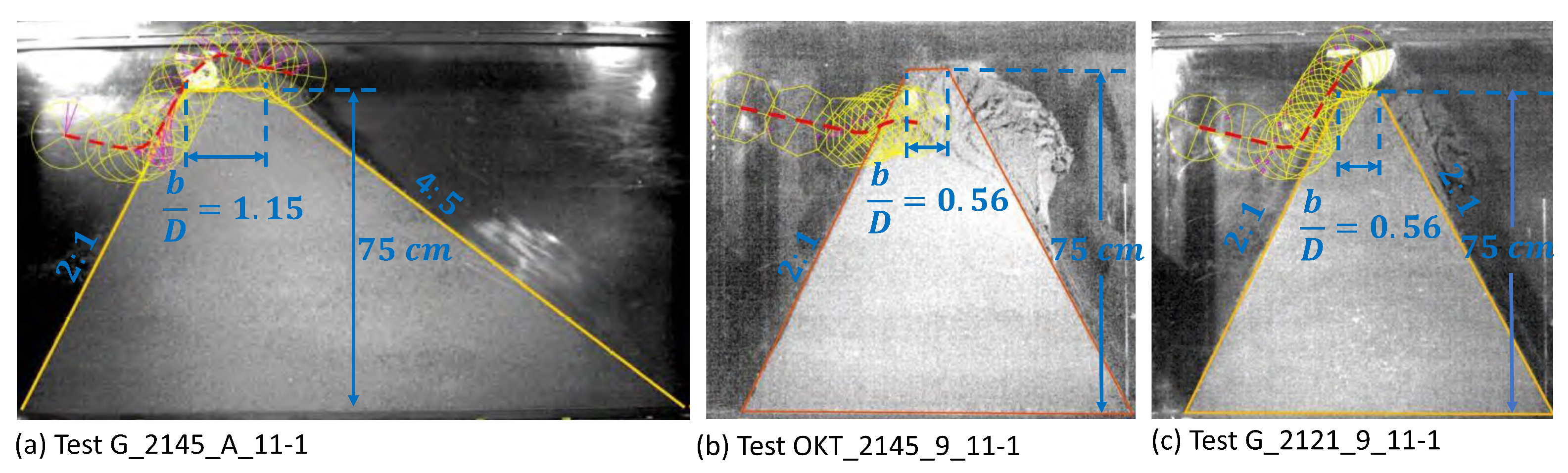
Figure 4 shows the images obtained with a high-speed camera during the tests in which collapse was reached. In this research, the collapse is defined when the structure does not contain the block due to the structural collapse or the overcoming of the block beyond the structure. Three collapse mechanisms were generated: the embankment resisted upon impact from a structural point of view but the block climbed along the bank (
Figure 4a); the impact induced the collapse of the affected area, even if the trajectory of the block did not go beyond the embankment (
Figure 4b); finally, the situation in which the two previous cases occur simultaneously (
Figure 4c). Tests on rockery RPEs brought to structural collapse by successive impacts showed the tension crack observed by Peila et al. (2007) [
14].
Numerous numerical simulations concerning reinforced RPEs are available in the literature referred to herein [
14,
28,
29,
30,
31,
32]; however, those that only refer to natural soil RPEs are relatively limited [
24,
29].
Plassiard and Donzé [
24,
33,
34] developed a DEM parametrical analysis on natural soil RPEs, to determine the efficiency range for a given set of geometrical and mechanical properties. The constitutive law of the soil is calibrated based on three energy levels [
24,
33]: the quasi-static behavior was set up using triaxial test of the soil reported in [
34], the Montani [
35] drop test at at energies between 50 to 100 kJ and the hight energy level drop test in the range from 1000 to 10,000 kJ of Pichler et. al., 2005 [
36]. The geometry of the embankment was established with a height of the structure equal to 5 m, a crest of 2 m, bank inclinations equal to 60° and impact height equal to 2/3 of the total. The impact was carried out with an energy of about 2000 kJ: block diameter
D = 1.97 m (mass of 10,600 kg) animated with a purely horizontal translational velocity of
v = 19.40 m/s. The authors observed a tendency of the block to cross the embankment as the slope of the upstream slope decreased, associated with the decrease in damage to the work [
24]. The simulations have shown how energy alone cannot be considered as the only design parameter, as different combinations of diameter and velocity provide the same force to the structure but with different post-impact trajectories [
33] compromising the overcoming verification; furthermore, the pair
D-
v and the angle of the velocity vector of the block, parameters which are neglected in usual design practice, are not negligible for this verification [
33].
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}