

Distributed Fixed-Time Leader-Following Consensus for Multi-Agent Systems: An Event-Triggered Mechanism
Abstract
:1. Introduction
2. Preliminaries
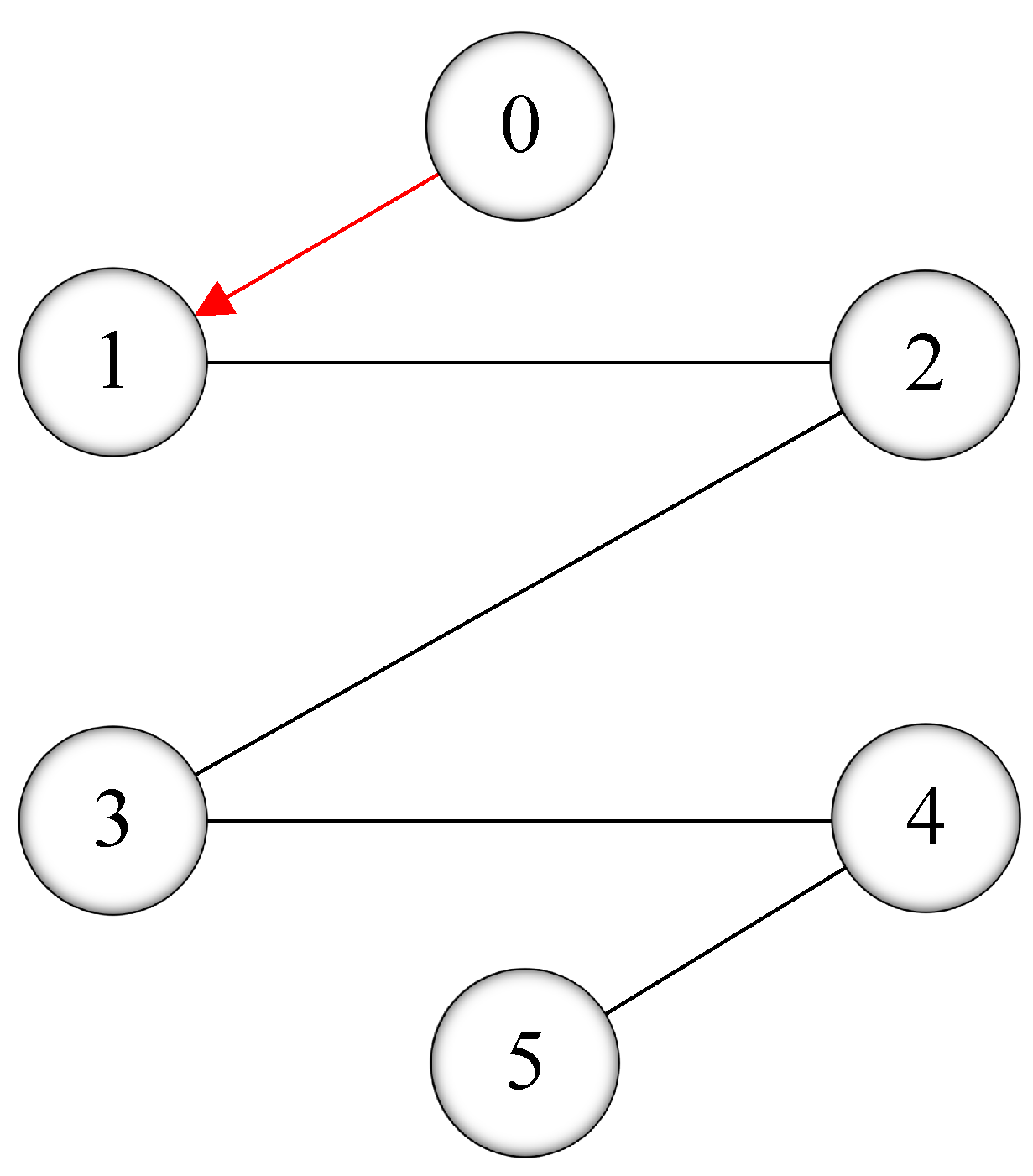
2.1. Description of Algebraic Graph Theory
2.2. Lemmas
- (1)
- is a positive definite matrix and its eigenvalues , .
- (2)
- There exists a vector satisfying
2.3. Problem Description
3. Main Results
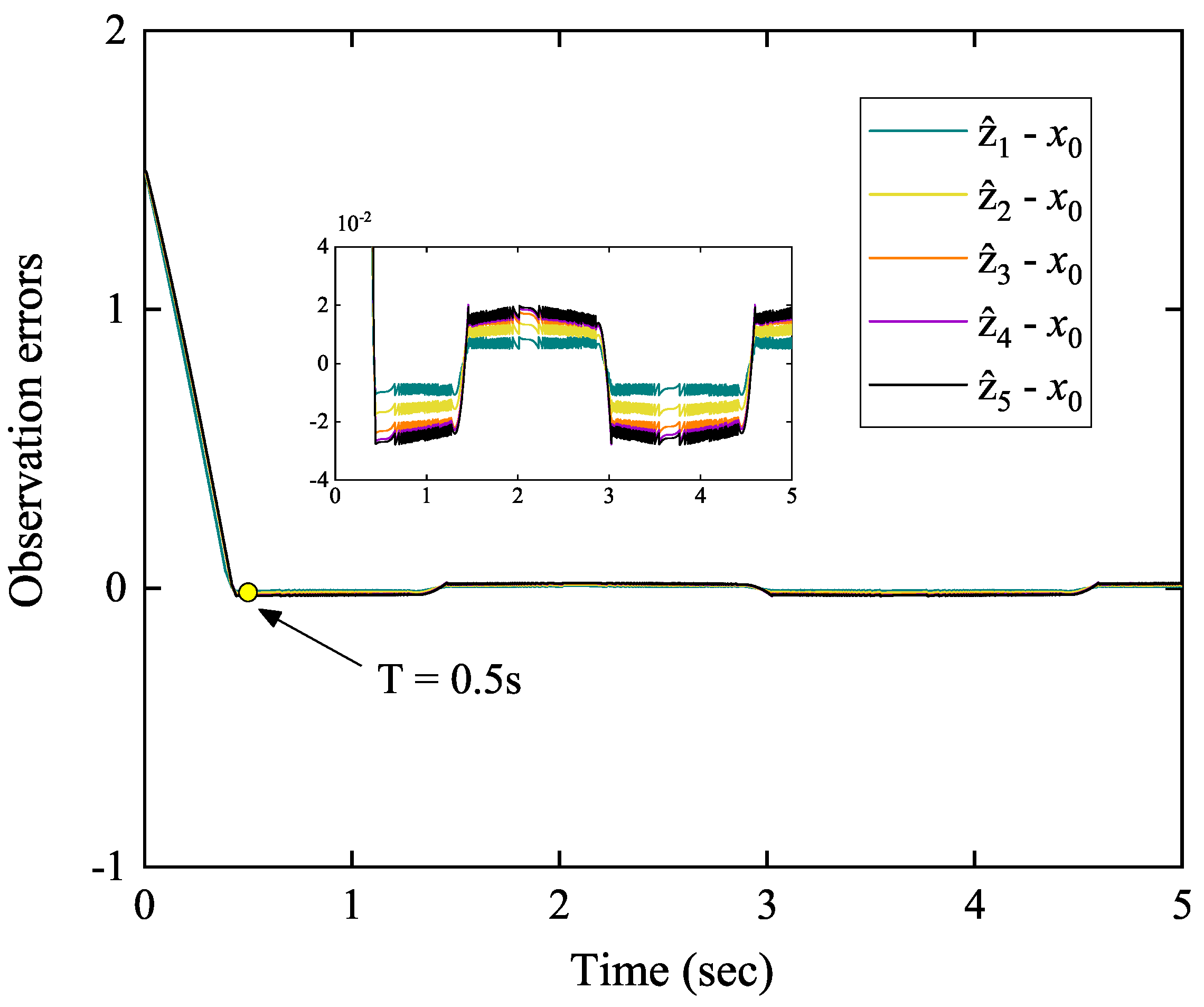
3.1. Distributed Fixed-Time Observer
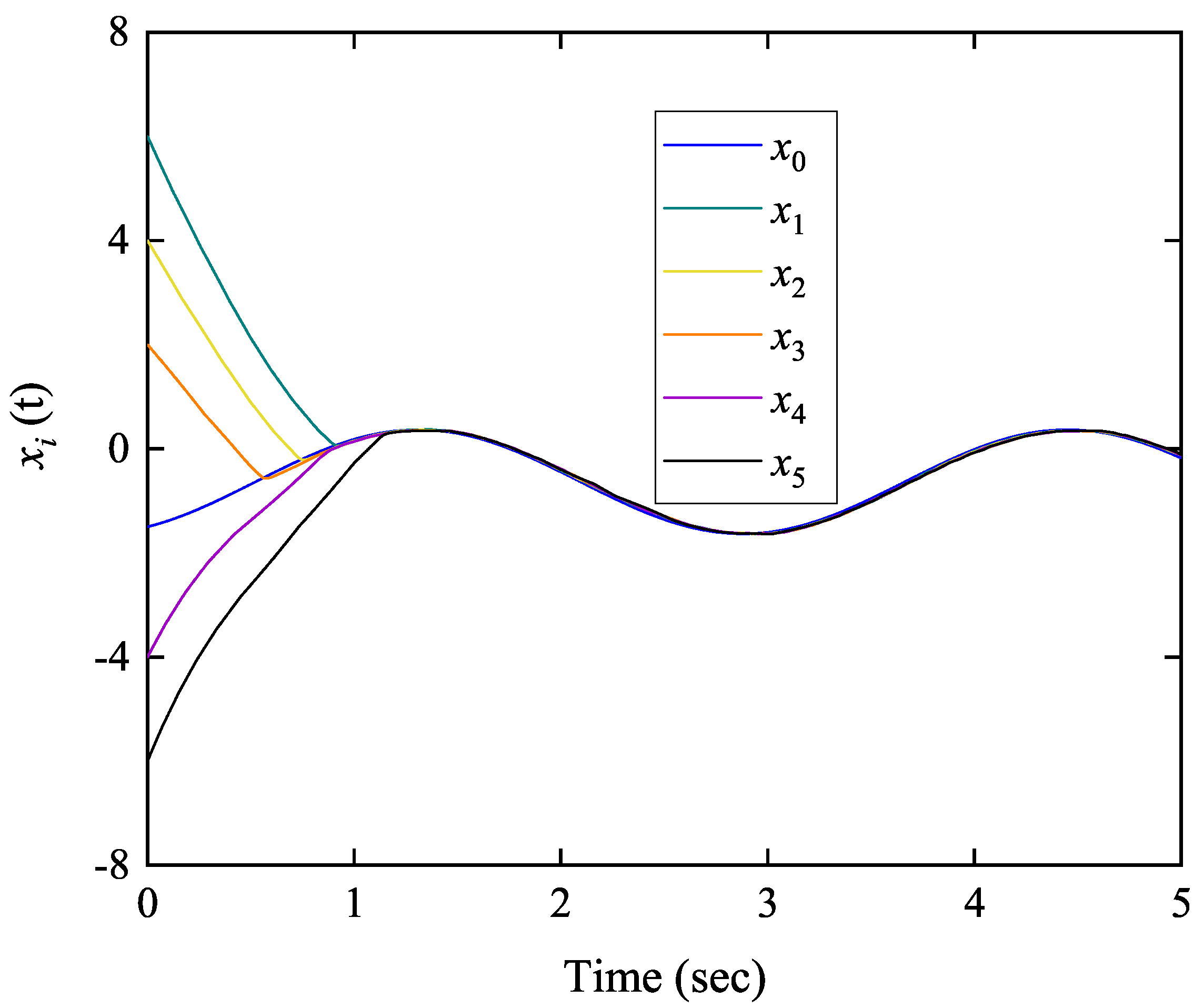
3.2. Event-Triggered Tracking Control
4. Simulations and Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MASs | Multi-agent systems |
| ET | Event-triggered |
References
- Li, Z.; Tang, Y.; Huang, T.; Wen, S. Formation control of multiagent networks: Cooperative and antagonistic interactions. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 2809–2818. [Google Scholar] [CrossRef]
- Yu, J.; Dong, X.; Li, Q.; Ren, Z. Distributed cooperative encirclement hunting guidance for multiple flight vehicles system. Aerosp. Sci. Technol. 2019, 95, 105475. [Google Scholar] [CrossRef]
- Hu, J.; Niu, H.; Carrasco, J.; Lennox, B.; Arvin, F. Fault-tolerant cooperative navigation of networked UAV swarms for forest fire monitoring. Aerosp. Sci. Technol. 2022, 123, 107494. [Google Scholar] [CrossRef]
- Wu, P.X.; Yang, C.C.; Cheng, T.H.; Cheng, T.H. Cooperative transportation of UAVs without inter-UAV communication. IEEE/ASME Trans. Mechatron. 2023, 28, 2340–2351. [Google Scholar] [CrossRef]
- Kwon, S.H.; Sun, Z.; Anderson, B.D.; Ahn, H.S. Sign rigidity theory and application to formation specification control. Automatica 2022, 141, 110291. [Google Scholar] [CrossRef]
- Chen, Y.; Shi, Y. Consensus for linear multiagent systems with time-varying delays: A frequency domain perspective. IEEE Trans. Cybern. 2017, 47, 2143–2150. [Google Scholar] [CrossRef]
- Lin, P.; Jia, Y. Multi-agent consensus with diverse time-delays and jointly-connected topologies. Automatica 2011, 47, 848–856. [Google Scholar] [CrossRef]
- Gong, W.; Li, B.; Ahn, C.K.; Yang, Y. Prescribed-time extended state observer and prescribed performance control of quadrotor UAVs against actuator faults. Aerosp. Sci. Technol. 2023, 138, 108322. [Google Scholar] [CrossRef]
- Ji, L.; Lv, D.; Yang, S.; Guo, X.; Li, H. Finite time consensus control for nonlinear heterogeneous multi-agent systems with disturbances. Nonlinear Dyn. 2022, 108, 2323–2336. [Google Scholar] [CrossRef]
- Li, M.; Deng, F. Cluster consensus of nonlinear multi-agent systems with markovian switching topologies and communication noises. ISA Trans. 2021, 116, 113–120. [Google Scholar] [CrossRef] [PubMed]
- Gao, W.; Ren, Y.; Zhao, L.; Weng, K.; Wang, H. Leader-following consensus of second-order multi-agent systems with input delays. Int. J. Control Autom. Syst. 2023, 21, 2844–2855. [Google Scholar] [CrossRef]
- Ni, X.; Yi, K.; Jiang, Y.; Zhang, A.; Yang, C. Consensus control of leaderless and leader-following coupled PDE-ODEs modeled multi-agent systems. Mathematics 2022, 10, 201. [Google Scholar] [CrossRef]
- You, X.; Hua, C.; Li, K.; Jia, X. Fixed-time leader-following consensus for high-order time-varying nonlinear multiagent systems. IEEE Trans. Autom. Control 2020, 65, 5510–5516. [Google Scholar] [CrossRef]
- Cheng, Y.; Hu, W.; Guo, Y.; Xie, Y. Reset control for leader-following consensus of multi-agent systems. ISA Trans. 2022, 129, 130–139. [Google Scholar] [CrossRef]
- Babazadeh, H.; Baradarannia, M.; Hashemzadeh, F. Event-triggered surrounding adaptive control of nonlinear multi-agent systems. ISA Trans. 2022, 128, 44–57. [Google Scholar] [CrossRef] [PubMed]
- Wen, L.; Yu, S.; Zhao, Y.; Yan, Y. Leader-following consensus for multi-agent systems subject to cyber attacks: Dynamic event-triggered control. ISA Trans. 2022, 128, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Ye, D.; Chen, M.M.; Yang, H.J. Distributed adaptive event-triggered fault-tolerant consensus of multiagent systems with general linear dynamics. IEEE Trans. Cybern. 2019, 49, 757–767. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Sun, Z.; Tang, Y.; Karimi, H.R. Adaptive event-triggered consensus of multiagent systems on directed graphs. IEEE Trans. Autom. Control 2021, 66, 1670–1685. [Google Scholar] [CrossRef]
- Wang, J.; Han, L.; Dong, X.; Li, Q.; Ren, Z. Distributed sliding mode control for time-varying formation tracking of multi-UAV system with a dynamic leader. Aerosp. Sci. Technol. 2021, 111, 106549. [Google Scholar] [CrossRef]
- Wei, C.; Li, Y.; Yin, Z.; Zhou, L.; Feng, J. On finite-time anti-saturated proximity control with a tumbling non-cooperative space target. Space Sci. Technol. 2023, 3, 0045. [Google Scholar] [CrossRef]
- Li, B.; Gong, W.; Yang, Y.; Xiao, B. Distributed fixed-time leader-following formation control for multi-quadrotors with prescribed performance and collision avoidance. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 7281–7294. [Google Scholar] [CrossRef]
- Huang, Z.; Tang, C.; Yu, Q.; Khaliel, M.S.S.; Wei, C. Dynamics and FNTSM control of spacecraft with a film capture pocket system. Space Sci. Technol. 2023, 3, 0079. [Google Scholar] [CrossRef]
- Xiao, B.; Wu, X.; Cao, L.; Hu, X. Prescribed time attitude tracking control of spacecraft with arbitrary disturbance. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 2531–2540. [Google Scholar] [CrossRef]
- Sun, J.; Yi, J.; Pu, Z.; Tan, X. Fixed-time sliding mode disturbance observer-based nonsmooth backstepping control for hypersonic vehicles. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 4377–4386. [Google Scholar] [CrossRef]
- Liu, H.; Li, B.; Xiao, B.; Ran, D.; Zhang, C. Reinforcement learning-based tracking control for a quadrotor unmanned aerial vehicle under external disturbances. Int. J. Robust Nonlinear Control 2023, 33, 10360–10377. [Google Scholar] [CrossRef]
- Li, B.; Gong, W.; Yang, Y.; Xiao, B.; Ran, D. Appointed fixed time observer-based sliding mode control for a quadrotor UAV under external disturbances. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 290–303. [Google Scholar] [CrossRef]
- Cui, D.; Ahn, C.K.; Xiang, Z. Fault-tolerant fuzzy observer-based fixed-time tracking control for nonlinear switched systems. IEEE Trans. Fuzzy Syst. 2023, 31, 4410–4420. [Google Scholar] [CrossRef]
- Li, B.; Liu, H.; Ahn, C.K.; Gong, W. Optimized intelligent tracking control for a quadrotor unmanned aerial vehicle with actuator failures. Aerosp. Sci. Technol. 2024, 144, 108803. [Google Scholar] [CrossRef]
- Cui, D.; Xiang, Z. Nonsingular fixed-time fault-tolerant fuzzy control for switched uncertain nonlinear systems. IEEE Trans. Fuzzy Syst. 2023, 31, 174–183. [Google Scholar] [CrossRef]
- Guo, Y.; Tian, Y.; Ji, Y.; Ge, Z. Fixed-time consensus of nonlinear multi-agent system with uncertain disturbances based on event-triggered strategy. ISA Trans. 2022, 126, 629–637. [Google Scholar] [CrossRef]
- Jin, X.; Shi, Y.; Tang, Y.; Werner, H.; Kurths, J. Event-triggered fixed-time attitude consensus with fixed and switching topologies. IEEE Trans. Autom. Control 2022, 67, 4138–4145. [Google Scholar] [CrossRef]
- Cai, Y.; Zhang, H.; Wang, Y.; Zhang, J.; He, Q. Fixed-time time-varying formation tracking for nonlinear multi-agent systems under event-triggered mechanism. Inf. Sci. 2021, 564, 45–70. [Google Scholar] [CrossRef]
- Liu, J.; Yu, Y.; Wang, Q.; Sun, C. Fixed-time event-triggered consensus control for multi-agent systems with nonlinear uncertainties. Neurocomputing 2017, 260, 497–504. [Google Scholar] [CrossRef]
- Liang, D.; Wang, C.; Zuo, Z.; Cai, X. Event-triggered based practical fixed-time consensus for chained-form multi-agent systems with dynamic disturbances. Neurocomputing 2022, 493, 414–421. [Google Scholar] [CrossRef]
- Zuo, Z.; Tian, B.; Defoort, M.; Ding, Z. Fixed-time consensus tracking for multiagent systems with high-order integrator dynamics. IEEE Trans. Autom. Control 2018, 63, 563–570. [Google Scholar] [CrossRef]
- Polycarpou, M.; Ioannou, P. A robust adaptive nonlinear control design. Automatica 1996, 32, 423–427. [Google Scholar] [CrossRef]
- Zuo, Z. Non-singular fixed-time terminal sliding mode control of non-linear systems. IET Control Theory Appl. 2015, 9, 545–552. [Google Scholar] [CrossRef]
- Ba, D.; Li, Y.X.; Tong, S. Fixed-time adaptive neural tracking control for a class of uncertain nonstrict nonlinear systems. Neurocomputing 2019, 363, 273–280. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R.W. Distributed Consensus in Multi-Vehicle Cooperative Control; Communications and Control Engineering; Springer: London, UK, 2008. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
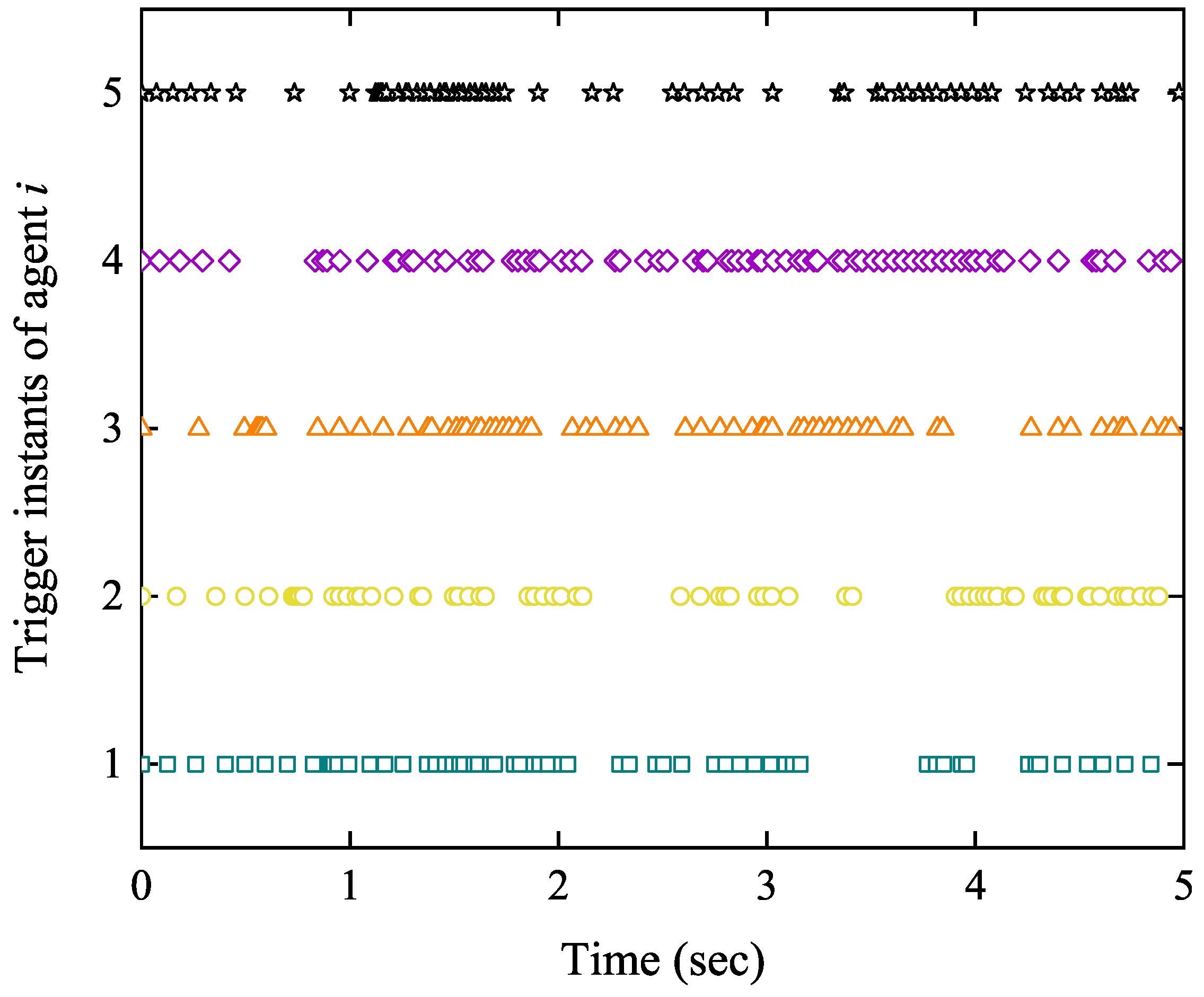
| Follower Agent i | Number of Trigger Times | Total Number of Sample Times |
|---|---|---|
| Agent 1 | 61 | |
| Agent 2 | 67 | |
| Agent 3 | 68 | 5000 (Sample time = 0.001 s) |
| Agent 4 | 75 | |
| Agent 5 | 64 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ge, C.; Ma, L.; Xu, S. Distributed Fixed-Time Leader-Following Consensus for Multi-Agent Systems: An Event-Triggered Mechanism. Actuators 2024, 13, 40. https://doi.org/10.3390/act13010040
Ge C, Ma L, Xu S. Distributed Fixed-Time Leader-Following Consensus for Multi-Agent Systems: An Event-Triggered Mechanism. Actuators. 2024; 13(1):40. https://doi.org/10.3390/act13010040
Chicago/Turabian StyleGe, Cheng, Ling Ma, and Shoulin Xu. 2024. "Distributed Fixed-Time Leader-Following Consensus for Multi-Agent Systems: An Event-Triggered Mechanism" Actuators 13, no. 1: 40. https://doi.org/10.3390/act13010040