1. Introduction
With the development of the industrial, technological innovation and energy consumption continues to accelerate, the automobile industry pays more and more attention to the process of electrification and intellectualization, thus accelerating the rapid evolution of automotive electronic technology and architecture [
1]. The braking system, as the key to the safety of electric vehicles, is required to realize the active braking function and energy recovery function [
2]. The traditional braking system cannot adjust the braking force in real time and cannot meet the development needs of electric vehicles. Therefore, the wire-controlled dynamic technology has gradually become a research hotspot at present [
3].
According to current research ideas, there are two main types of wire control dynamic systems: electro-hydraulic brake system (EHB) and electro-mechanical brake system (EMB) [
4]. The EHB is a simple modification of the original traditional braking system, using a motor instead of a vacuum booster, and the braking force can be adjusted. The energy recovery function can be realized through semi-decoupling or full decoupling between the brake pedal and the brake master cylinder. Compared with EHB, EMB eliminates hydraulic components such as hydraulic master cylinder, brake pipeline, etc., with flexible structure layout, fast response speed, good compatibility, and arranged at the wheel end, can realize individual and precise control of the wheel, and can integrate multiple functional technologies, which is the main research direction of the current wire control dynamic system [
5].
Because of the many advantages of EMB systems, more and more people are studying them. Krishnamurthy et al. studied EMB systems using switched reluctance motors and proposed a robust nonlinear force controller [
6]. Han et al. established a mathematical model of electronic wedge brake and proposed a contact point detection algorithm based on sliding mode control [
7]. Park et al. analyzed the mechanical and electrical parts of EMB [
8]. Baek et al. adopted the Maximum torque per ampere (MTPA) method to control the motor current in the electro-mechanical brake, estimated the d-q axis current reference value through the motor Angle, realized the efficient control of EMB and reduced energy consumption [
9].
Under the action of brake saturation, load-related friction and nonlinear stiffness, the performance of EMB will be subject to many limitations [
10]. How to quickly and accurately control the clamping force is the current research focus of EMB. Young et al. proposed a clamping force estimation control method based on a new type of switch to avoid excessive clamping force caused by inertia effect [
11]. Considering the failure of clamping force sensor, Zhao et al. proposed a clamping force control method based on power fast terminal sliding mode [
12]. Chihoon et al. proposed a clamping force control calculation based on adaptive PID considering the initial clearance of electro-mechanical brake [
13]. Park et al. proposed a clamping force estimation and control method based on hysteresis model considering the clamping force phase hysteresis [
14]. Lee et al. established a clamping force controller considering the optimal state constraint time based on the double-switch control method [
15]. Li et al. established a nonlinear EMB model and proposed a clamping force control method considering brake clearance and force following to achieve a smooth transition between clearance elimination and clamping force following [
16]. It is known that the clamping force control strategy of the existing EMB system has problems such as response hysteresis and following jitter [
17].
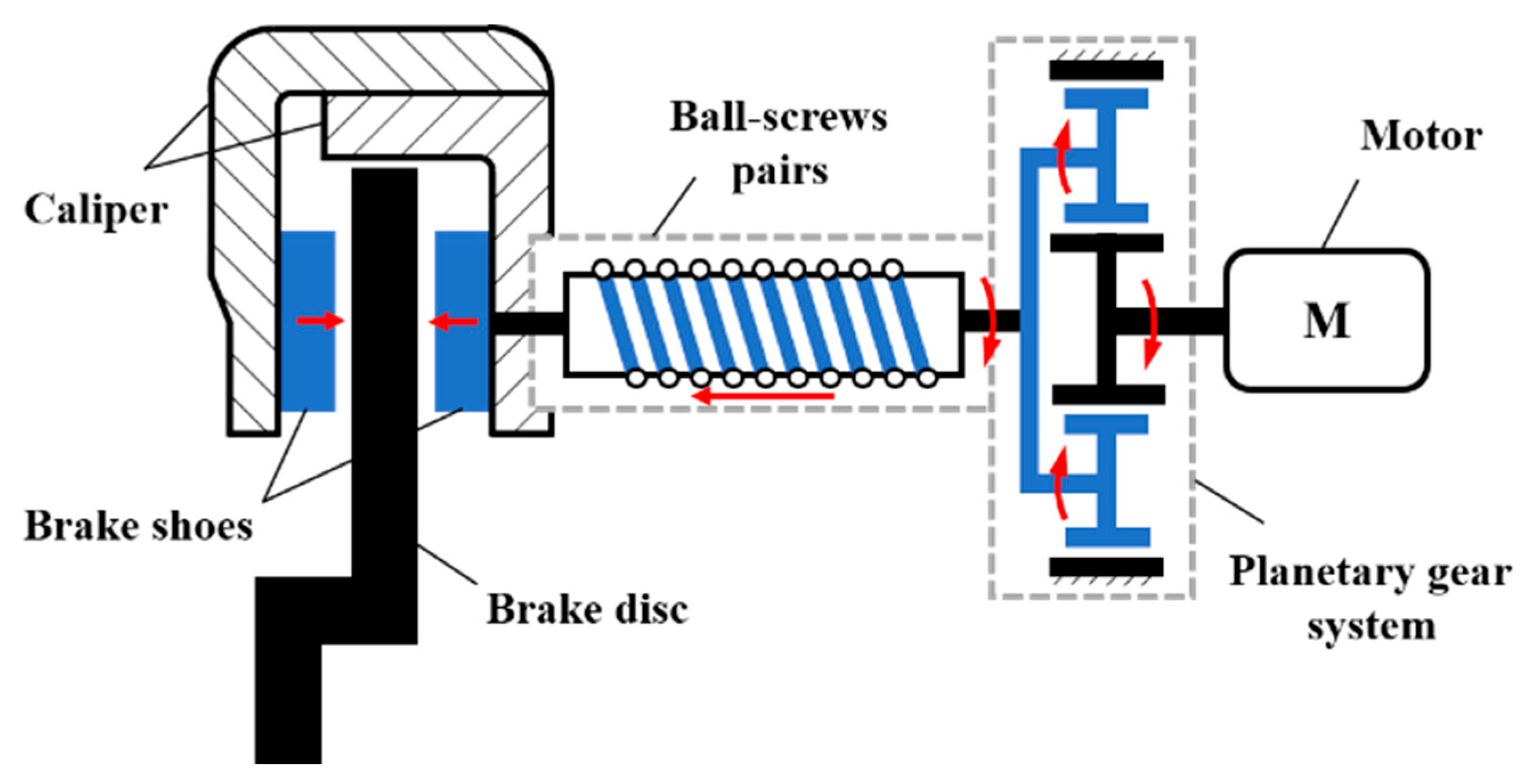
Therefore, a VUF-PID based EMB clamping force control strategy is proposed to solve the above problems in this paper. The stretching factors are introduced to adjust the EMB system in real time, so that the system can keep the proper parameter value and improve the system’s adaptive ability. There are two main contributions of this paper. First, an EMB structure with a planetary gear reducer and ball screw configuration is used, and a mathematical model of an EMB system with a new type of clamping force controller that considers the friction characteristics of the motor is developed. Secondly, an EMB clamping force control method based on VUF-PID controller is proposed, which uses stretching factors to adjust the system parameters in real time according to the running state of the controlled object.
The arrangement of this paper is as follows. In
Section 2, the correlation analysis and model establishment of EMB system are carried out. In
Section 3, an EMB clamping force control strategy based on VUF-PID is established. In
Section 4, different working conditions are simulated to verify the effectiveness of the proposed strategy.
Section 5 presents conclusions and a vision for future work.
3. EMB Clamping Force Control Strategy Based on VUF-PID
Usually, the braking process of EMB system is divided into brake clearance elimination stage, clamping force following stage and brake clearance formation stage according to the working state of the motor. In order to obtain higher control accuracy and improve the control quality of the EMB system, a clamping force control strategy based on VUF-PID controller is proposed for the clamping force following stage, which enables the EMB system to quickly reach the required target clamping force, control the motor to push the brake liner to clamp the brake disc, and the actual clamping force can be stably output according to the target clamping force.
The target response of the controlled system at time
is
, the actual response is
, and the difference between the two is the error
,
. PID controller transfer function is obtained by linear combination of proportional, integral and differential errors.
where
are the ratio, integral and differential coefficients respectively.
Fuzzy PID controller is an intelligent control strategy. Combining fuzzy control with PID control, the system can be adjusted in real time according to the current operating state of the system, with certain adaptive adjustment ability and good control effect [
19]. The error
and error change rate
of target clamping force and actual clamping force are selected as the input, PID parameter adjustment quantities
are selected as the output. Mamdani fuzzy reasoning method is adopted, and seven language variables are used to describe: negative big (NB), negative median (NM), negative small (NS), zero (ZE), positive small (PS), positive median (PM), and positive big (PB). Assuming that the domain of
are [−24,000, 24,000] and [−2400, 2400], the domain of
are [−1, 1], [−0.1, 0.1] and [−0.002, 0.002]. The membership function selects trigonometric function.
The input and output variables are multiplied by the corresponding quantitative factors and the proportional factors, thus the transformation of the two-dimensional quantity from the basic field to the fuzzy field is realized, and the transformation of the precise quantity to the fuzzy quantity is realized. The quantitative factors of
are
, the proportion factors of the correction quantities
are
. After processing the fuzzy PID controller, the PID parameter adjustment quantities
are obtained. The fuzzy rules control table of PID parameters are shown in
Table 1,
Table 2 and
Table 3 and the output adjustment quantities of the PID controller is determined by Equation (11).
where
are the initial parameters of the PID controller.
The center of gravity method is used to de-fuzzy, and the calculation formula is expressed:
where
is the output control quantity of the controller;
is the center of the fuzzy set generated for the rule;
is the area under the membership function corresponding to the rule;
is the number of output variables.
Fuzzy PID controller has the ability of adaptive adjustment, but the ability of adaptive adjustment is uncertain. Although the fuzzy PID controller can make the system have a certain stability through real-time adaptive adjustment, the rough and redundant rules of the controller design will prolong the adjustment time of the system. Therefore, this paper adds a scaling factor on the basis of fuzzy PID control to adjust the system online in real time, so that the system can obtain appropriate parameter values to improve the adaptive ability of the system and enhance the fault tolerance of the system.
From Equation (10), the values of
affect the output of the controller, but the values of
that have a greater impact on the control effect. Therefore, when designing the variable domain adaptive control algorithm in this paper, it mainly carries out variable domain analysis on the values of
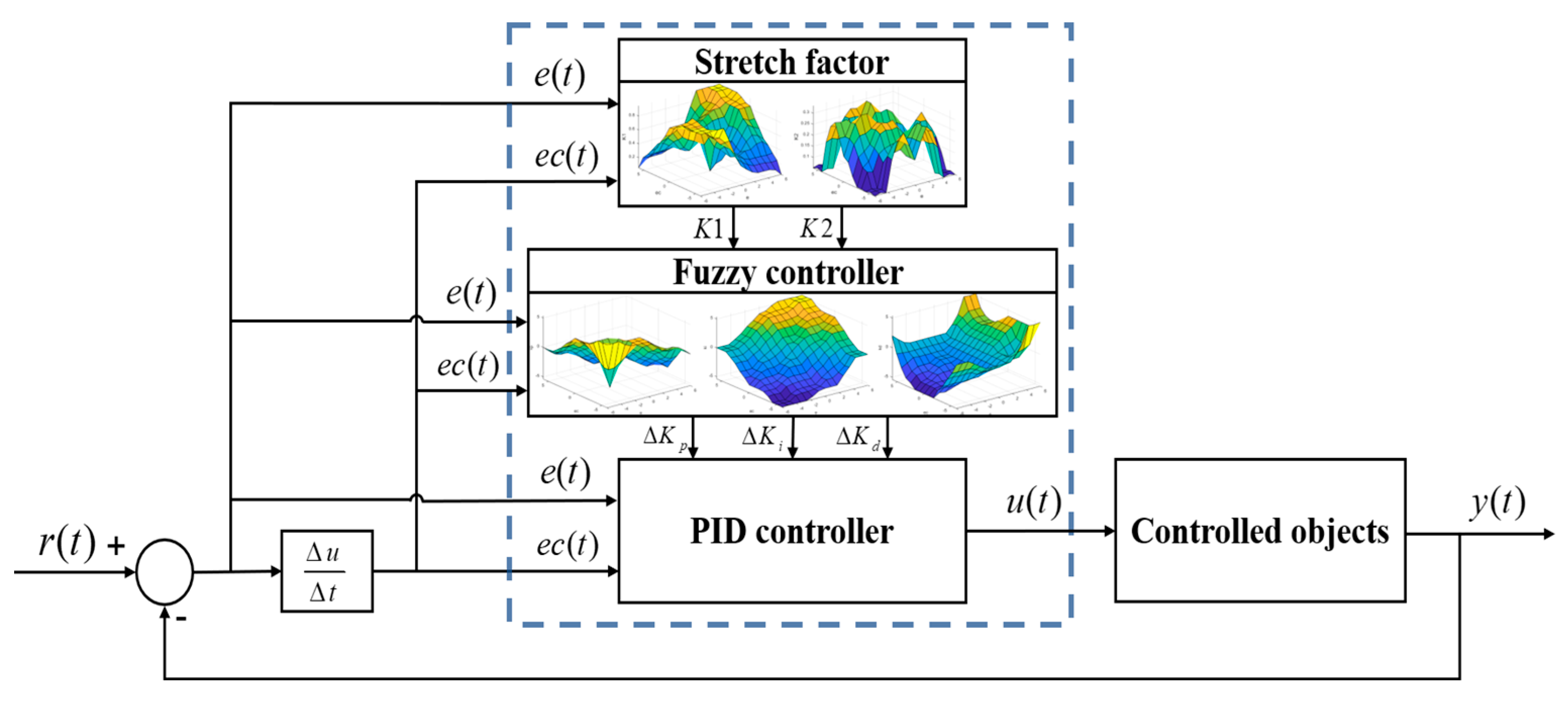
. According to the analysis of two-dimensional input and output variables of fuzzy PID controller, the membership function of input variables can be regarded as the constraint input domains, which can weaken the quantization factors. Therefore, the scale factor and integral factor that have significant influence are selected to adjust adaptively on the system. The structure block diagram of VUF-PID controller is shown in
Figure 3, where K1 and K2 are the scaling factors of the domain.
The commonly used methods to design scaling factors are mainly based on adaptive function and fuzzy language. The method based on adaptive function has simple structure and control of the scaling factor of the domain, which is difficult to be applied to complex practical engineering applications. Therefore, this paper chooses the method based on fuzzy language to scale the domain.
The input variables are
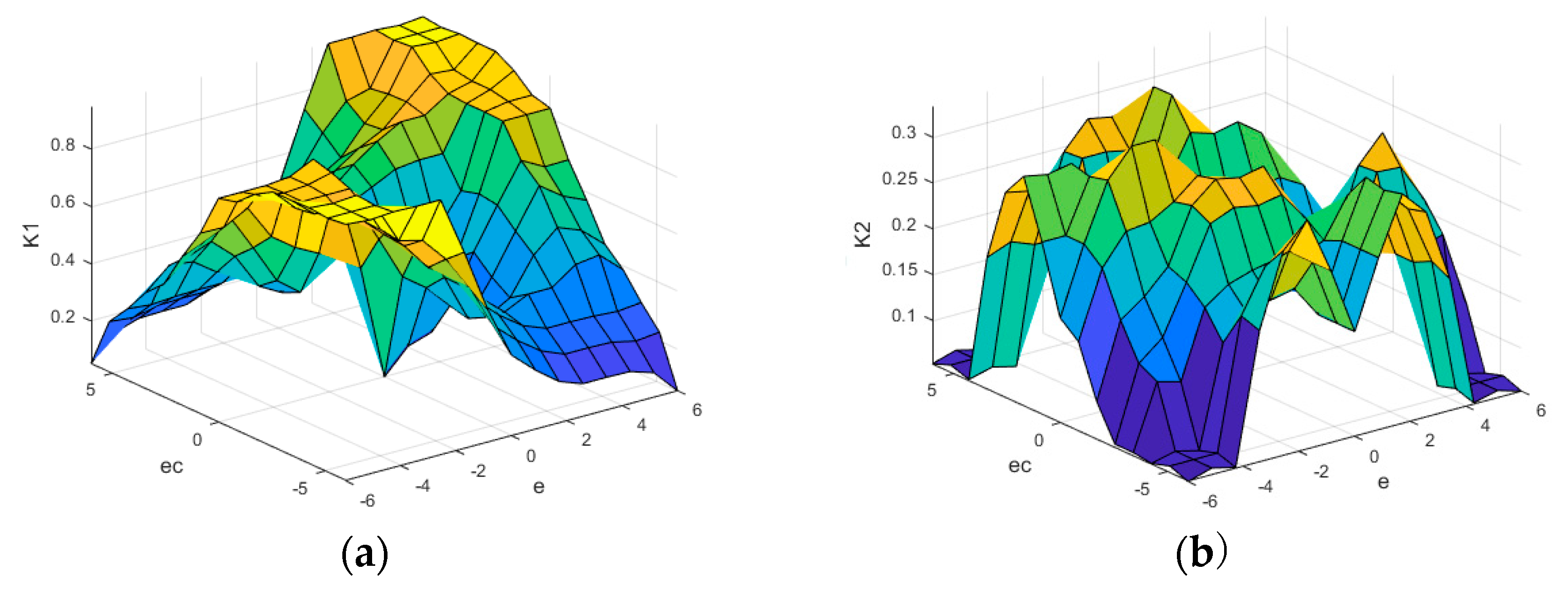
, the same as the basic fuzzy controller, the fuzzy set theory domains are both [−6, 6], and the fuzzy language variables are both represented by {BN, MN, SN, ZE, SP, MP, BP}. The output variables are the scale factors
and
, and the fuzzy set theory domains are both [0, 1]. The fuzzy language variables are represented by {zero, small, small, small, large, large, maximum}, namely {ZE, VS, LS, S, LB, B, VB}, and the membership functions select trigonal function. The input-output relation surface of VUF-PID controller is shown in
Figure 4.
4. Simulation Results and Discussion
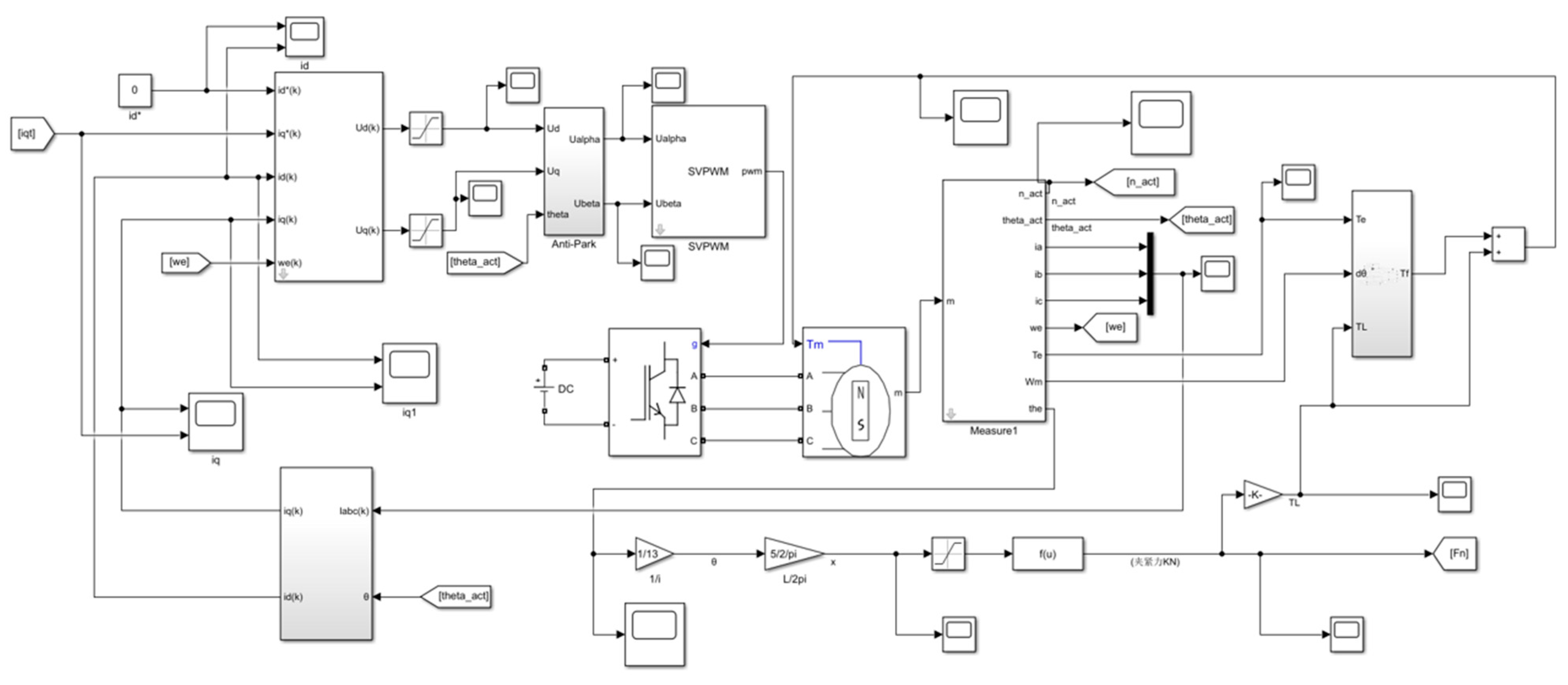
The mathematical model of EMB system is established in MATLAB/Simulink software in this paper, as shown in
Figure 5. The parameters of the VUF-PID controller and simulation model are shown in
Table 4 and
Table 5 respectively. In order to verify the advantages of the VUF-PID control strategy designed for clamping force control, the differences between VUF-PID and PID and fuzzy PID (F-PID) control are analyzed by simulation comparison. The comparison simulation results are shown in
Figure 6,
Figure 7 and
Figure 8. The simulation analysis of step braking condition, brake gear switching condition and sine braking condition is carried out.
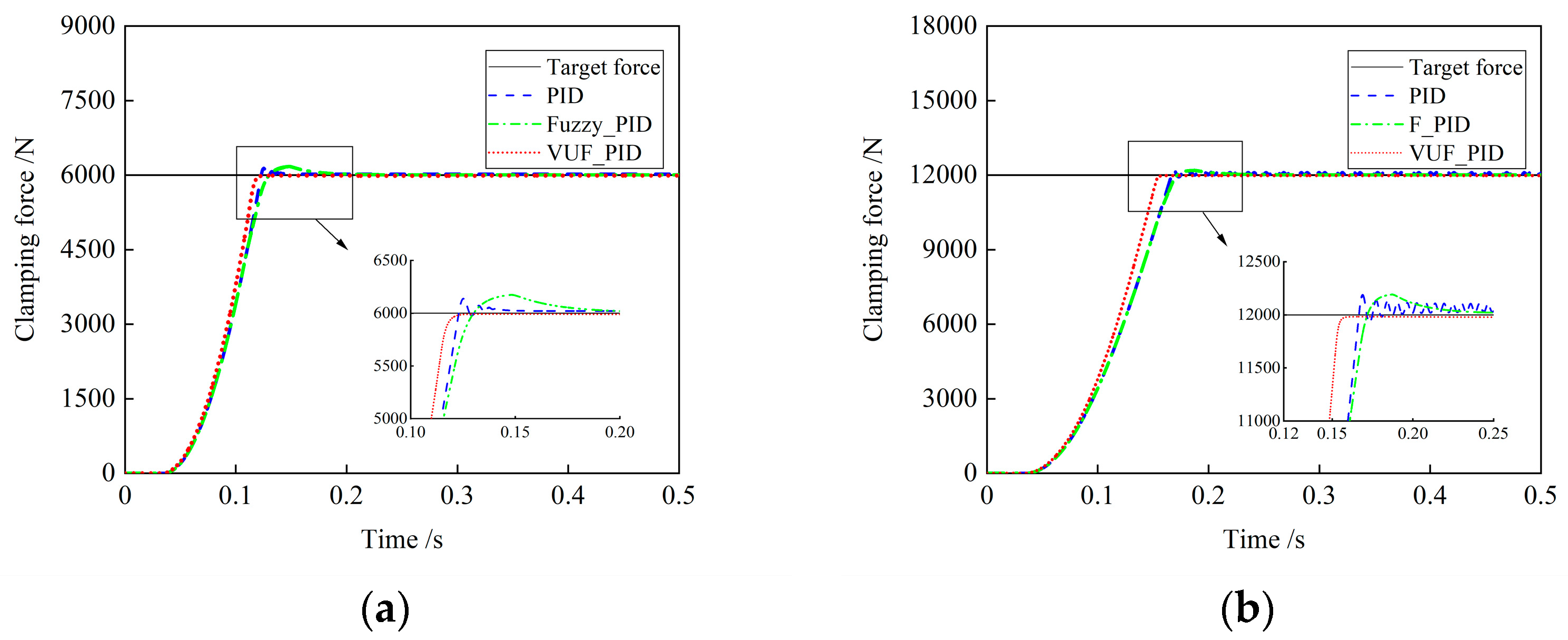
(1) Simulation analysis of step braking condition
Step signals of 6000 N, 12,000 N, 18,000 N and 24,000 N are respectively applied to the input end of the target clamping force of the EMB system actuator. The simulation curves of clamping force response characteristics in the control system are shown in
Figure 6. By comparison with
Figure 6, simulation effect parameters of the three EMB control strategies are shown in
Table 6.
By comparing the simulation parameters of the three EMB control strategies shown in
Table 6, it can be seen that the maximum adjustment time of PID control is 0.274 s and the maximum overshoot is 2.28%. The maximum adjustment time of F-PID control is 0.272 s and the maximum overshoot is 2.85%. The maximum adjustment time is 0.209 s and the maximum overshoot is 0.17%. Before the target clamping force is 12,000 N, the effect of PID control is better than that of F-PID control. However, with the increasing clamping force, F-PID control will gradually be stronger than PID control. In addition, when PID control controls the clamping force with large amplitude, there will be oscillation and large steady-state error. The VUF-PID controller designed in this paper has good tracking performance for different target clamping forces. The adjustment time and overshoot of EMB system are effectively reduced, and the dynamic and steady state performance are significantly improved.
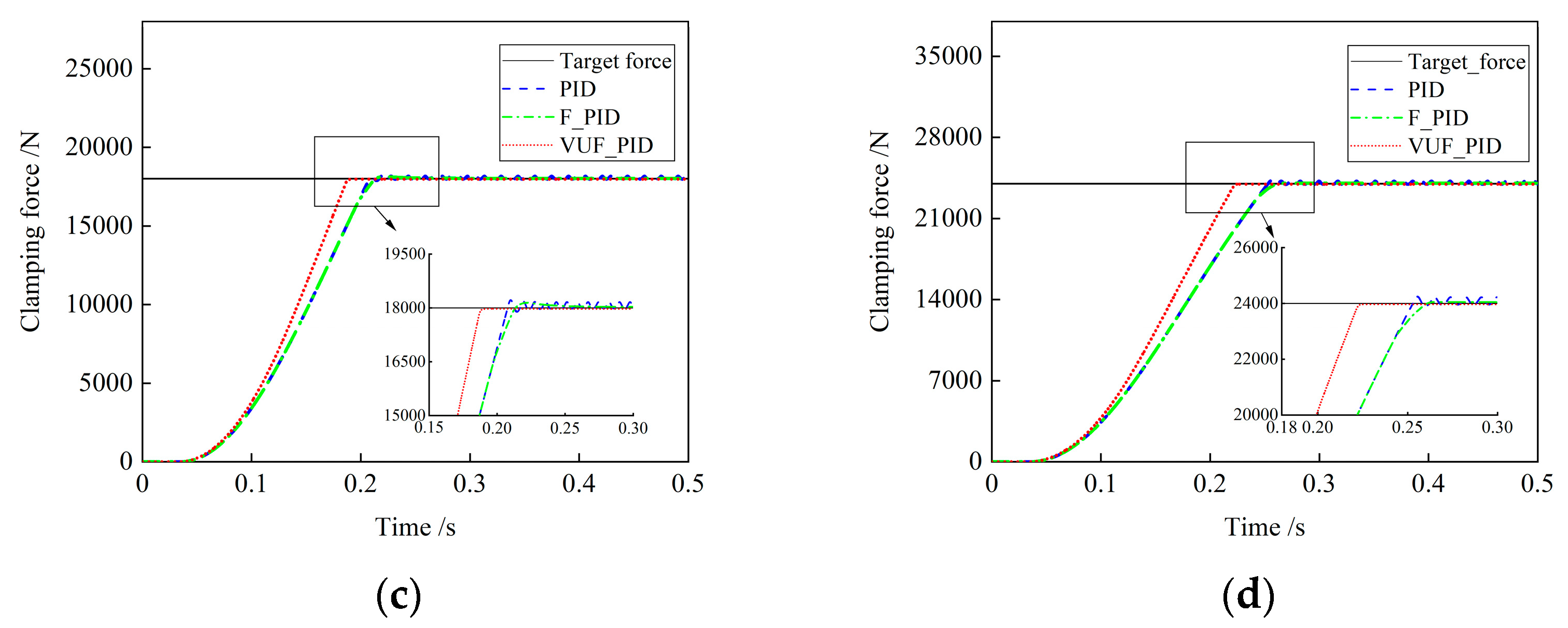
(2) Simulation analysis of brake gear switching condition
When the car is braking, it also needs to switch the brake gear. At this time, the EMB system needs to quickly follow the target clamping force expected by the driver of different gear within a certain period of time. The dynamic simulation conditions are as follows: (a) Brake gear increasing switching conditions, applying brake gear 0–12,000–24,000 N. (b) Brake gear decreasing switching condition, applying brake gear 24,000–12,000–0 N.
Figure 7 shows the simulation curves of clamping force response under increasing brake gear switching condition and decreasing brake gear switching condition.
Figure 7a shows the clamping force response characteristic curve of EMB system under increasing brake gear switching condition. In the process of actual clamping force jumping from 12,000 N to 24,000 N, the clamping force response time with VUF-PID, F-PID, and PID control are 0.0755 s, 0.1083 s, and 0.1291 s. The control effect of VUF-PID is 30.28% and 41.52% faster than the other two kinds, respectively.
Figure 7b shows the clamping force response characteristic curve of EMB system under increasing brake gear switching condition. In the process of actual clamping force jumping from 24,000 N to 12,000 N, the clamping force response time with VUF-PID, F-PID, and PID control are 0.0471 s, 0.0512 s, and 0.0603 s. The control effect of VUF-PID is 8.01% and 21.89% faster than the other two kinds respectively. It can be seen that the VUF-PID control proposed in this paper still has a good adaptive adjustment ability under the braking gear switching conditions, especially in the initial stage of response, the gain parameters can be better adjusted according to the error and error change rate, so that the desired clamping force can be reached stably, quickly and accurately.
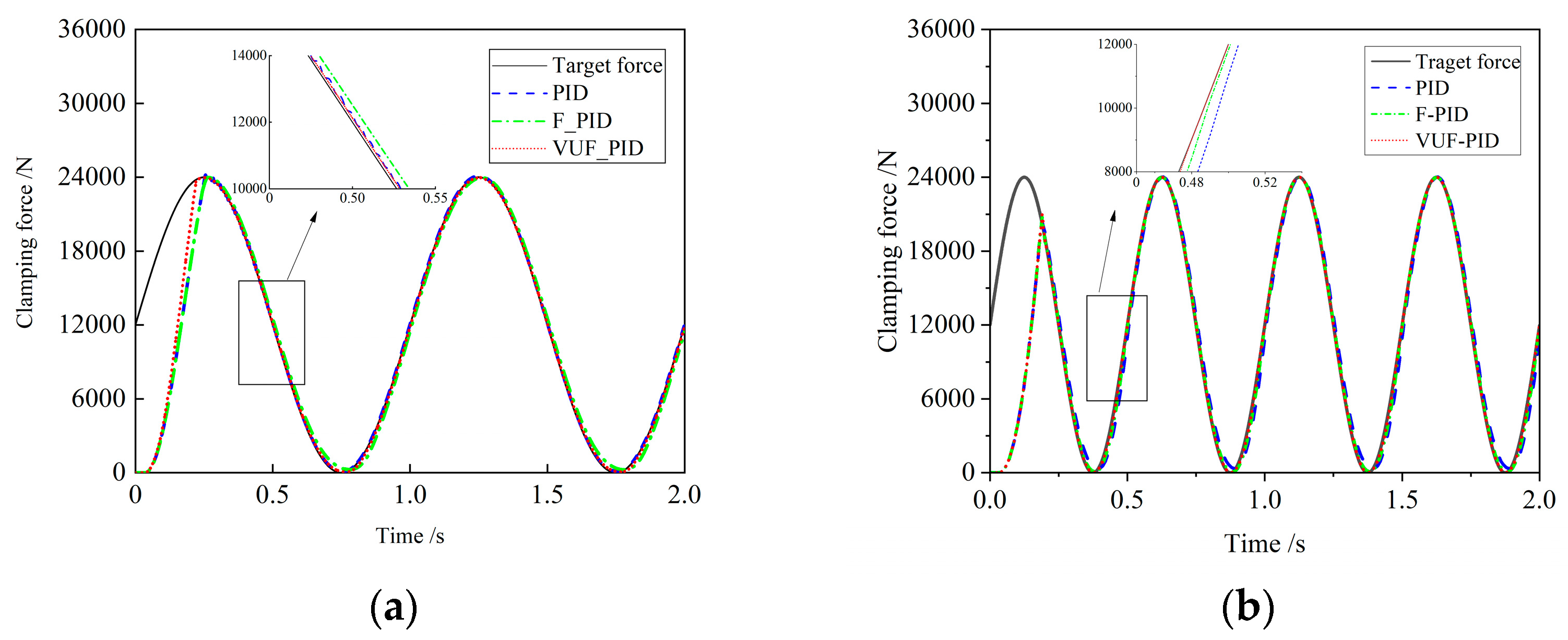
(3) Sinusoidal working condition simulation analysis
Sinusoidal signal with amplitude 24,000 N and a frequency of 1 Hz and 2 Hz applied to the target clamping force input of the EMB system actuator. The simulation curve of clamping force response characteristics in the control system is shown in
Figure 8.
Figure 8 shows the clamping force response characteristic curve of EMB system under sinusoidal condition. PID control has better clamping force control effect in sinusoidal condition than F-PID control, because the target clamping force value in sinusoidal condition is changing all the time, the adaptive adjustment capability of F-PID control requires a certain adjustment time, so there is a certain delay in following the target clamping force in the heel sine condition, and there will be an error when following the clamping force value of the target at the next moment. However, PID control has certain jitter when following the clamping force of time-varying target, because PID control lacks the ability of adaptive adjustment in the face of changing errors. The proposed VUF-PID control introduces stretching factors into the design, which improves the following ability to cope with the moment change of the target clamping force condition, can adjust the proportional factor and integral factor in time, shorten the adaptive adjustment time, and quickly reach the target clamping force value at the moment, indicating that VUF-PIF control has stronger tracking performance and robustness performance.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}