
A Comparative Study of Two Common Pump-Controlled Hydraulic Circuits for Single-Rod Actuators

Abstract
:1. Introduction
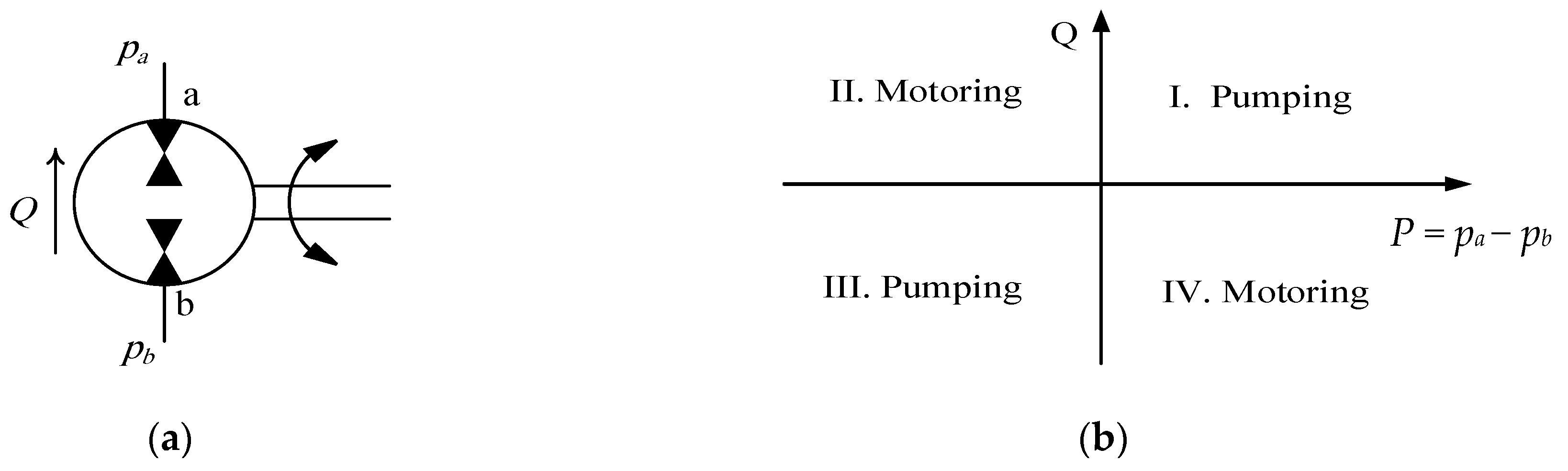
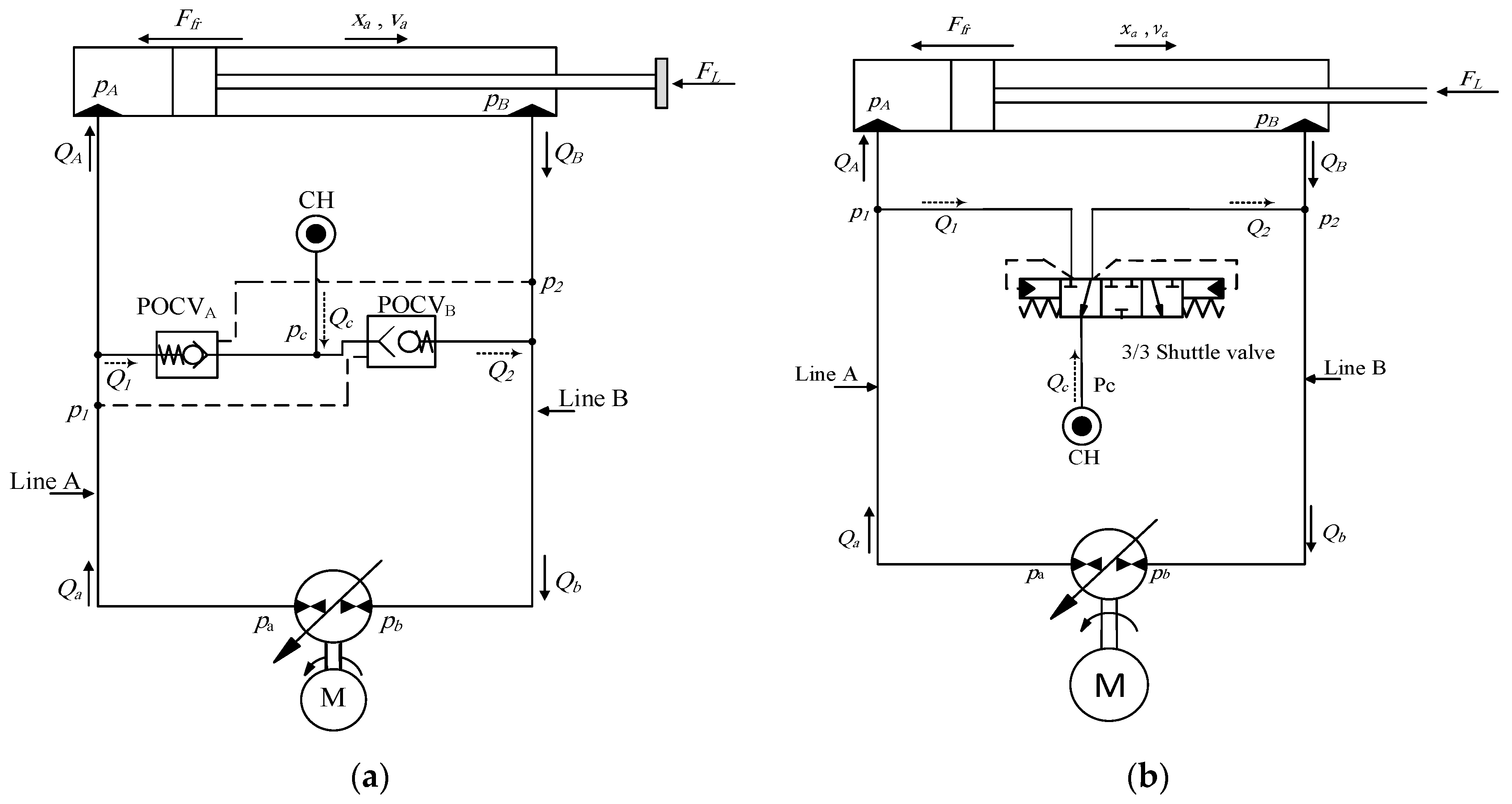
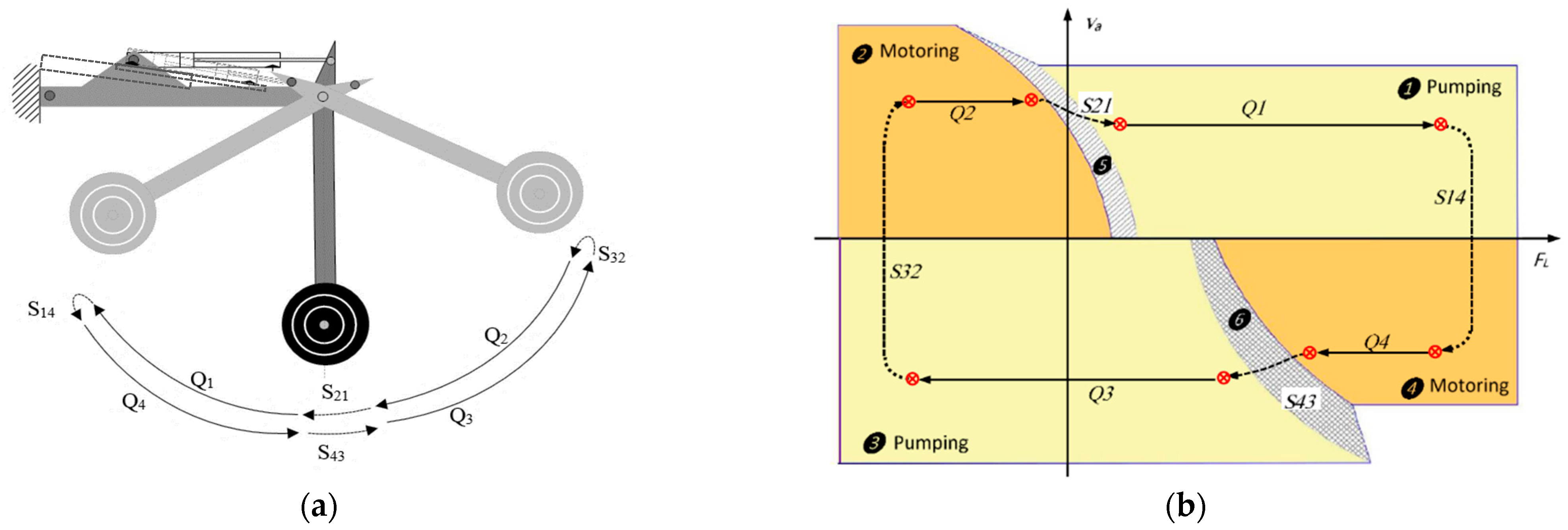
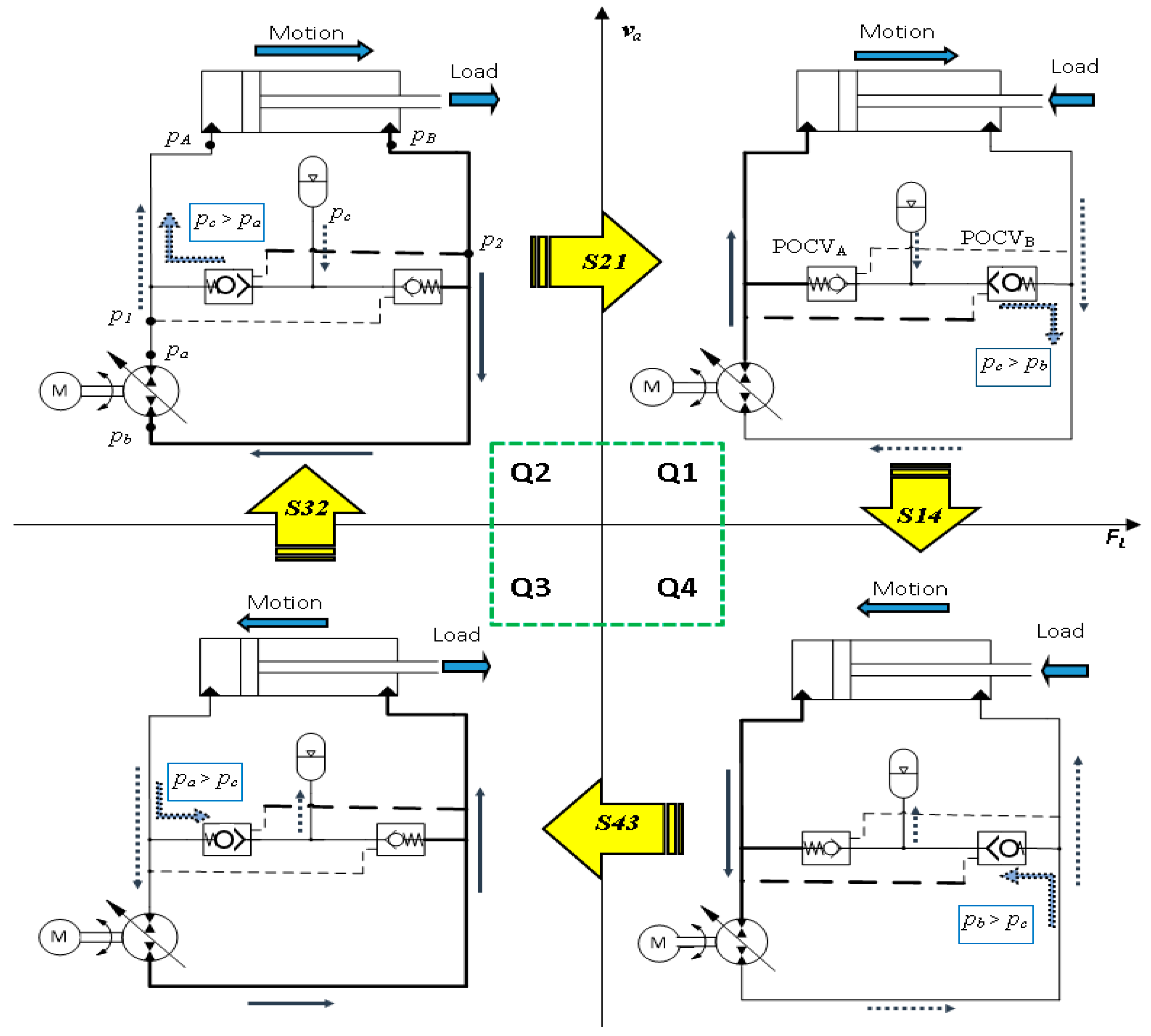
2. Operation of Pump-Controlled Circuits
3. Modelling and Simulations
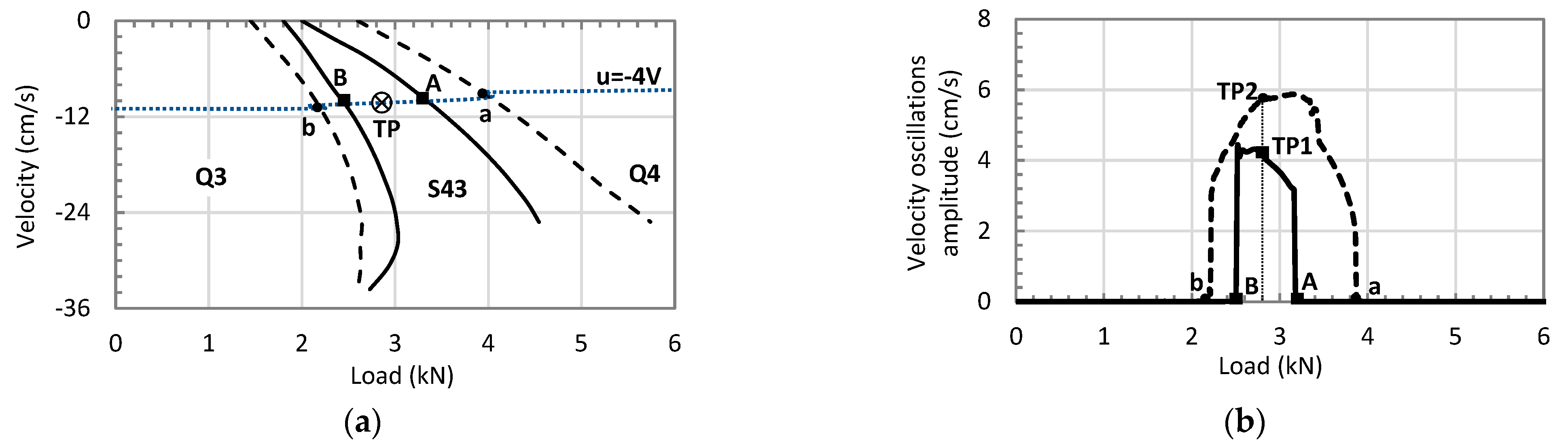
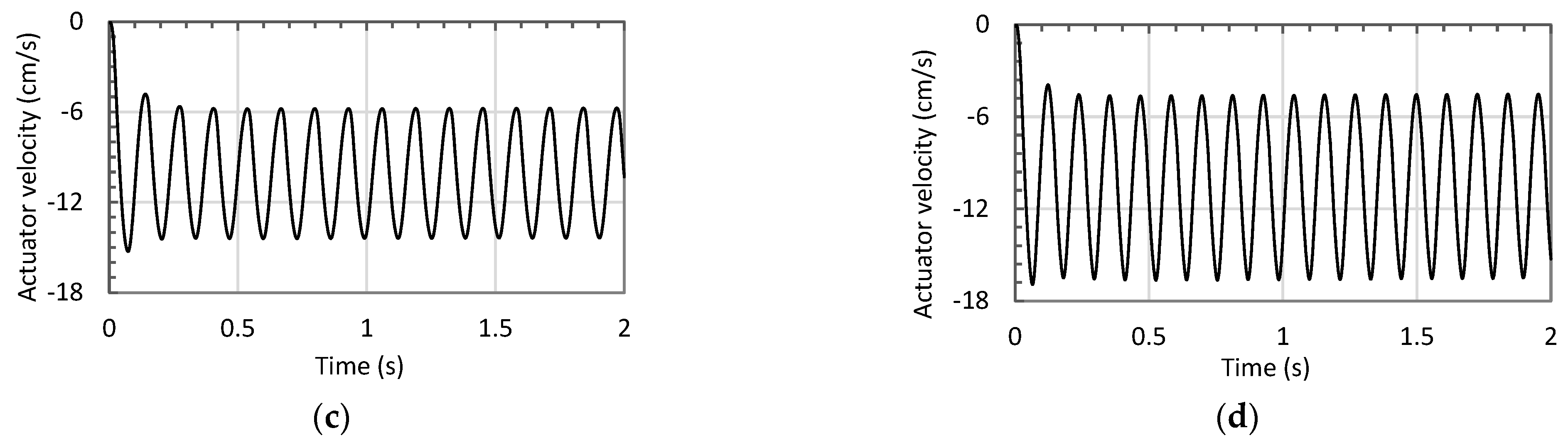
3.1. Simulations for Constant Loading Conditions
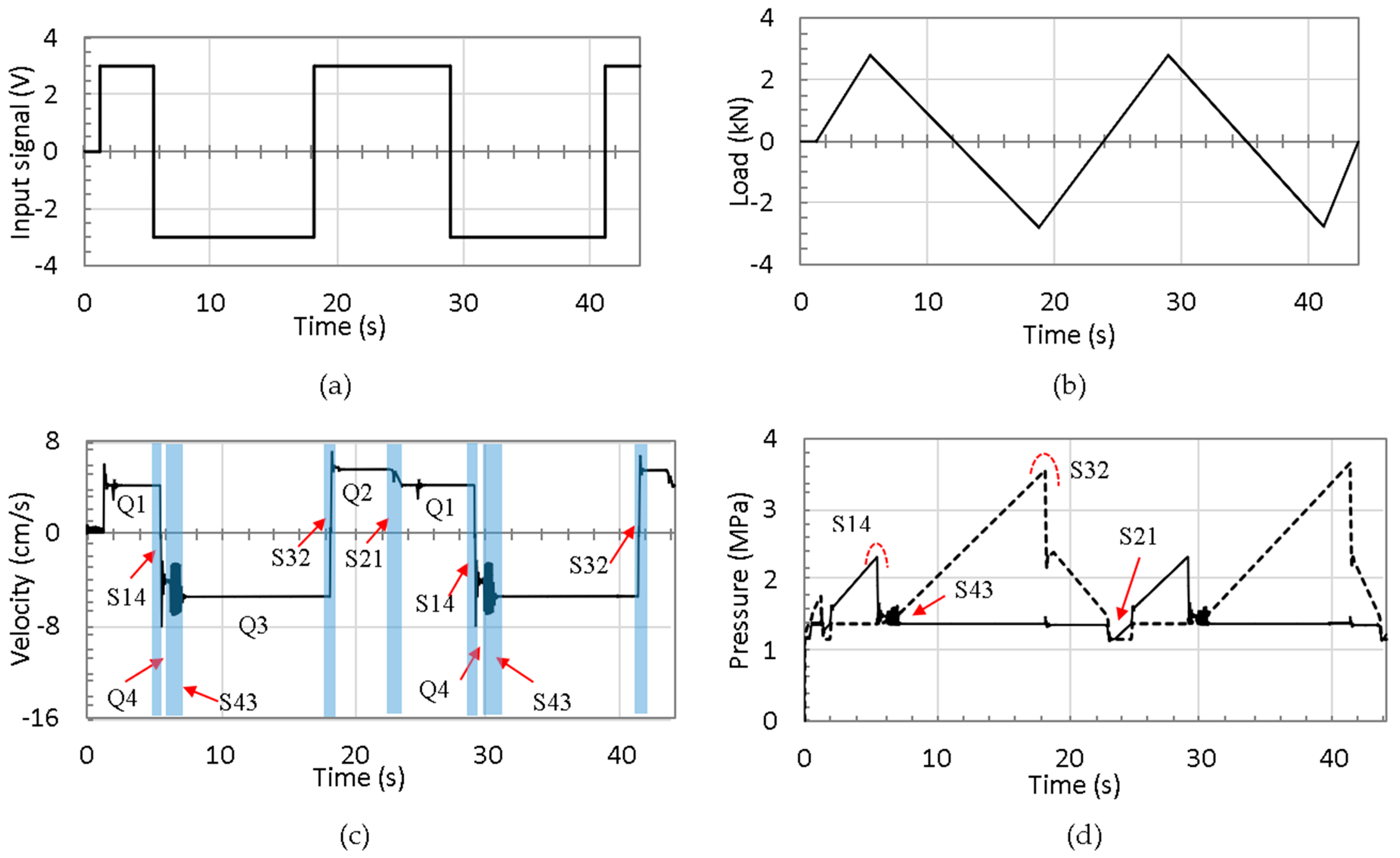
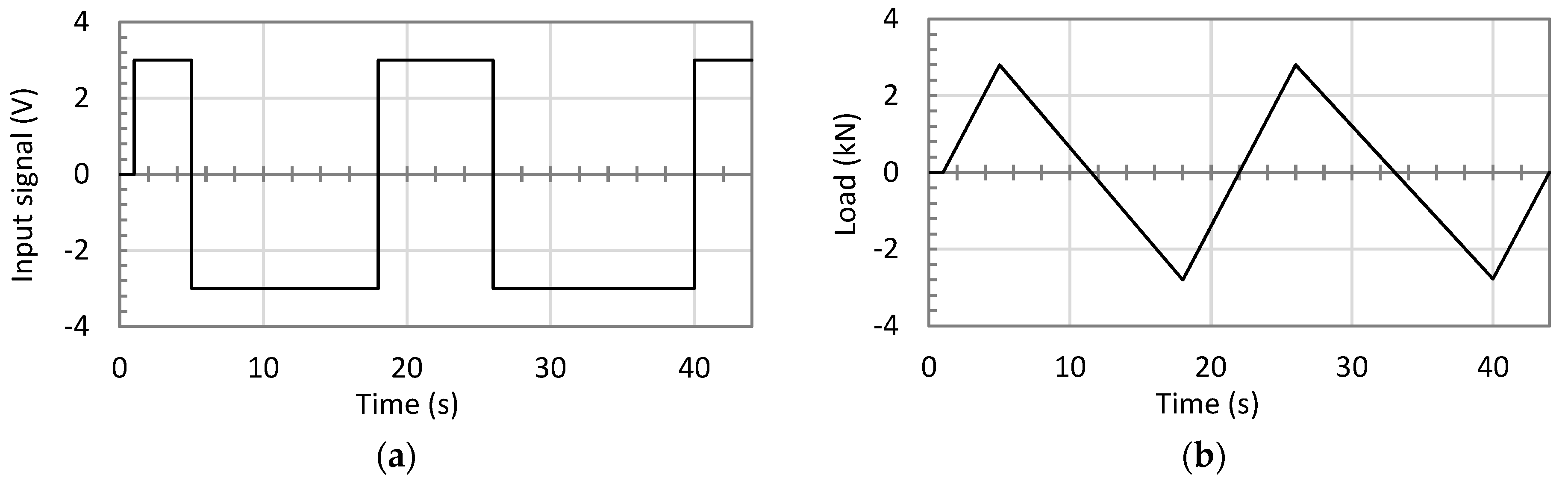
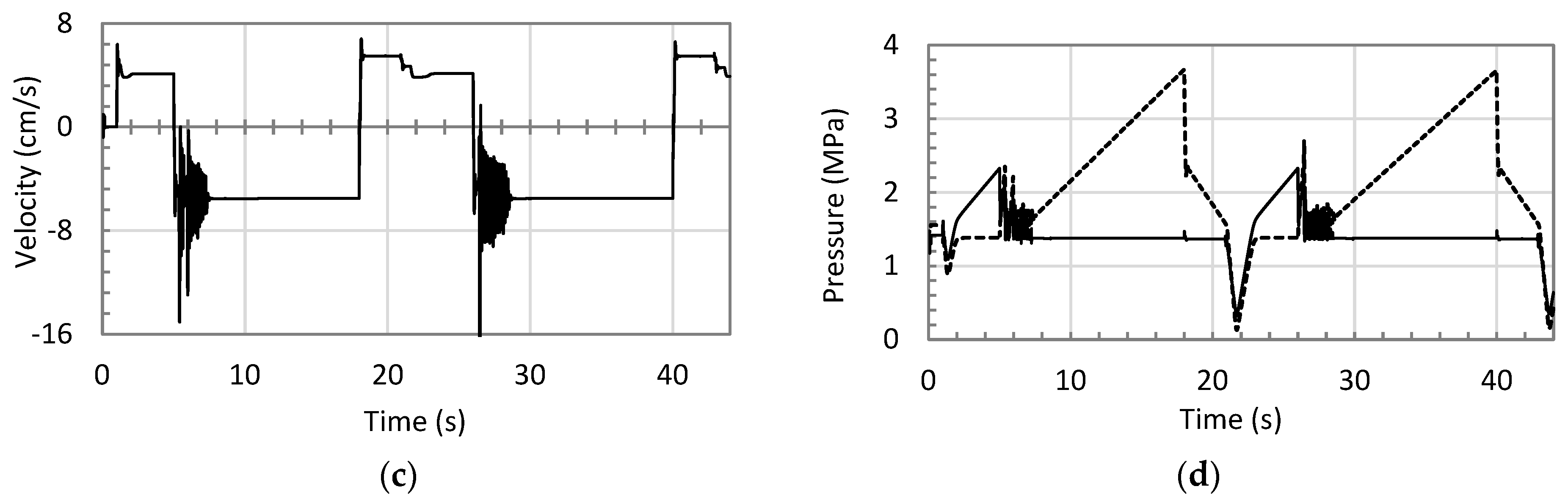
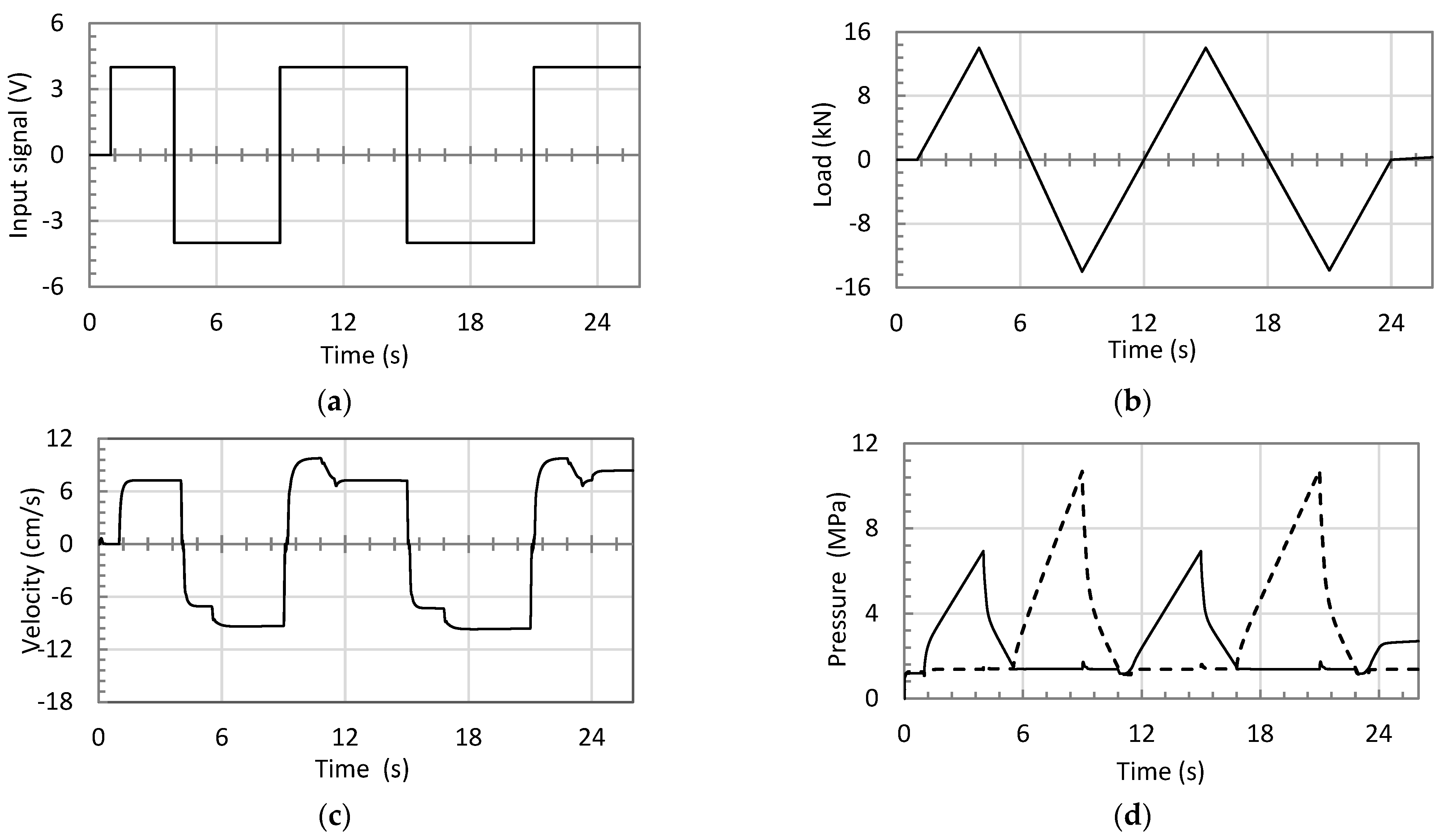
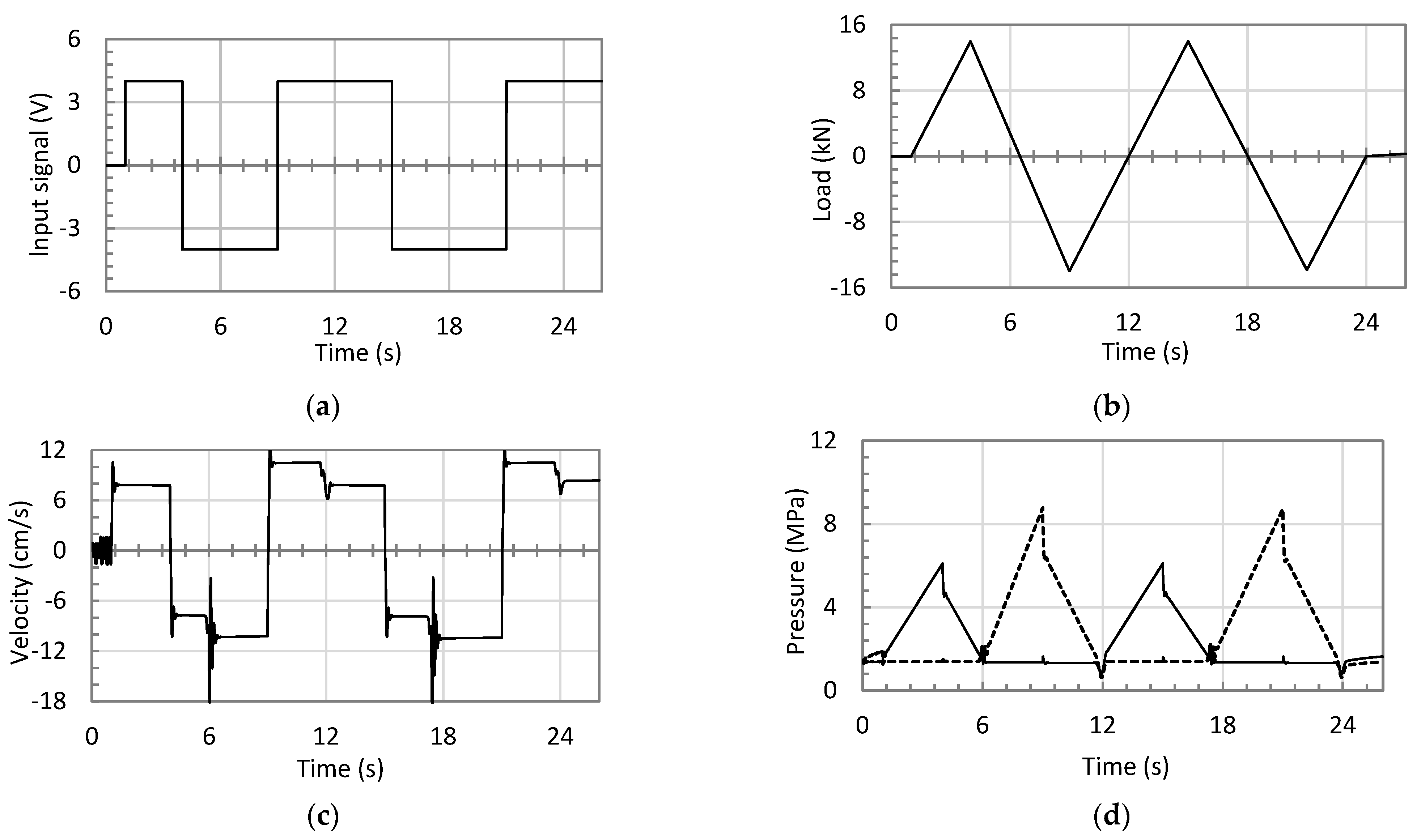
3.2. Simulations for Variable Loading Conditions
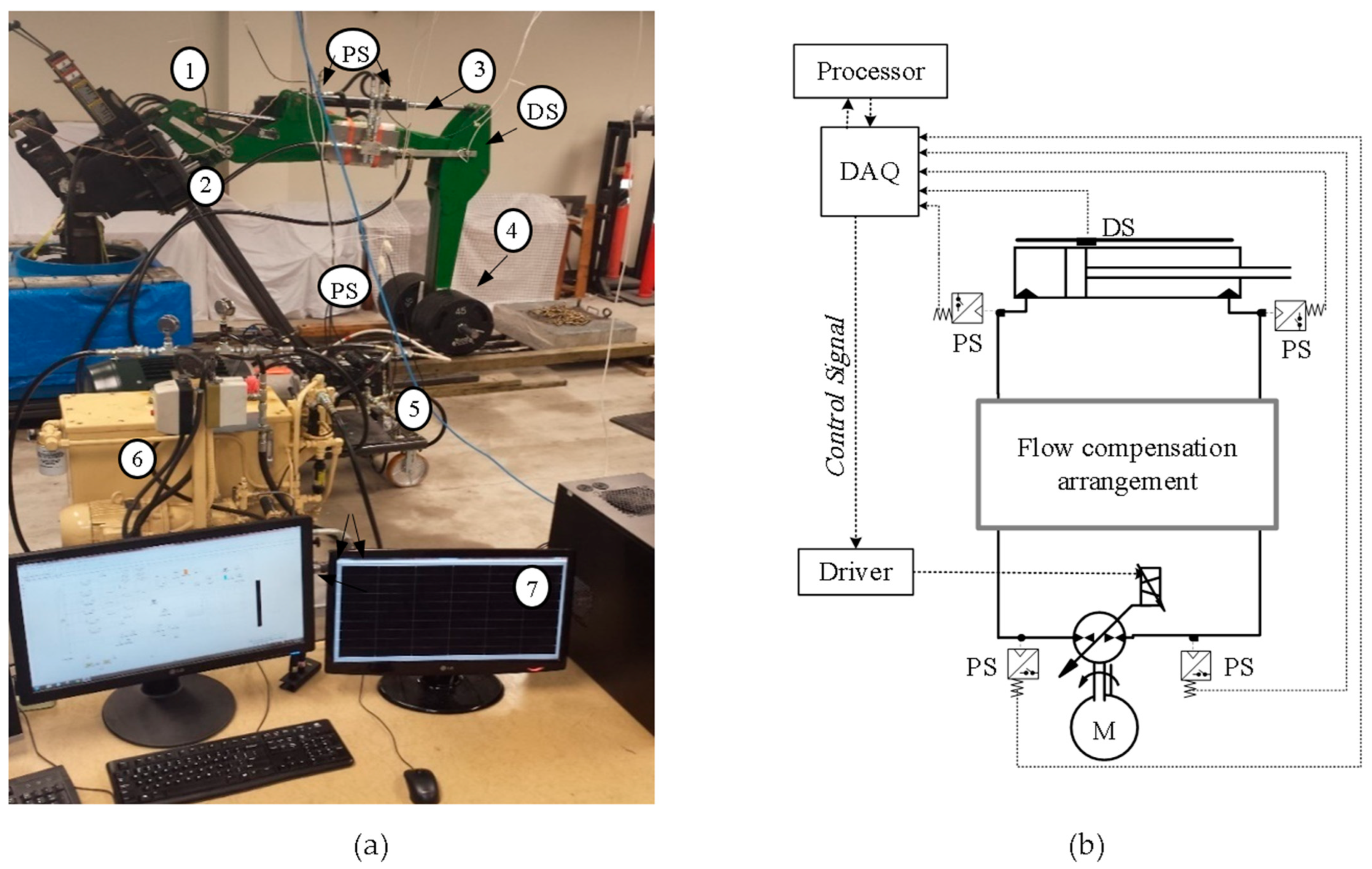
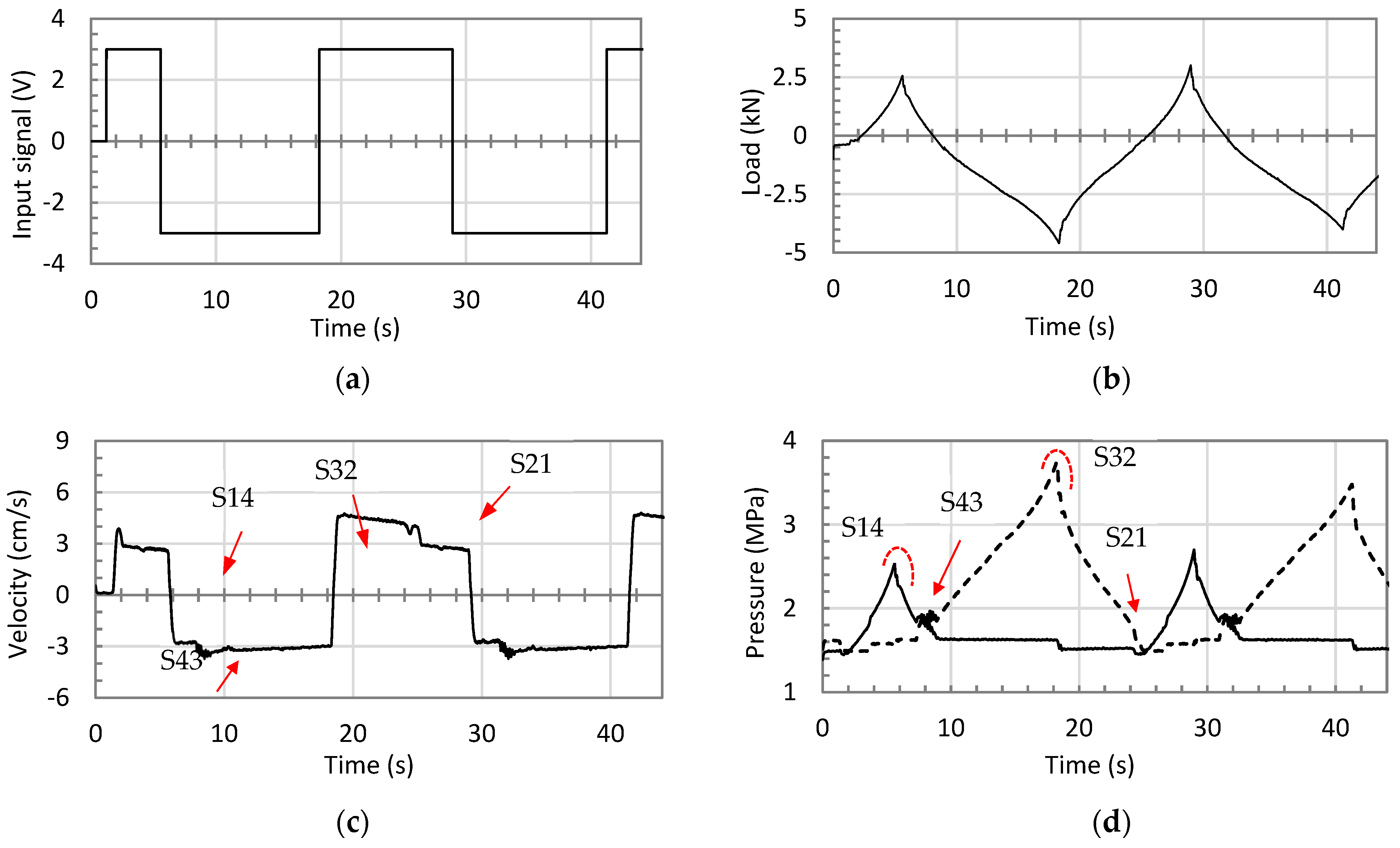
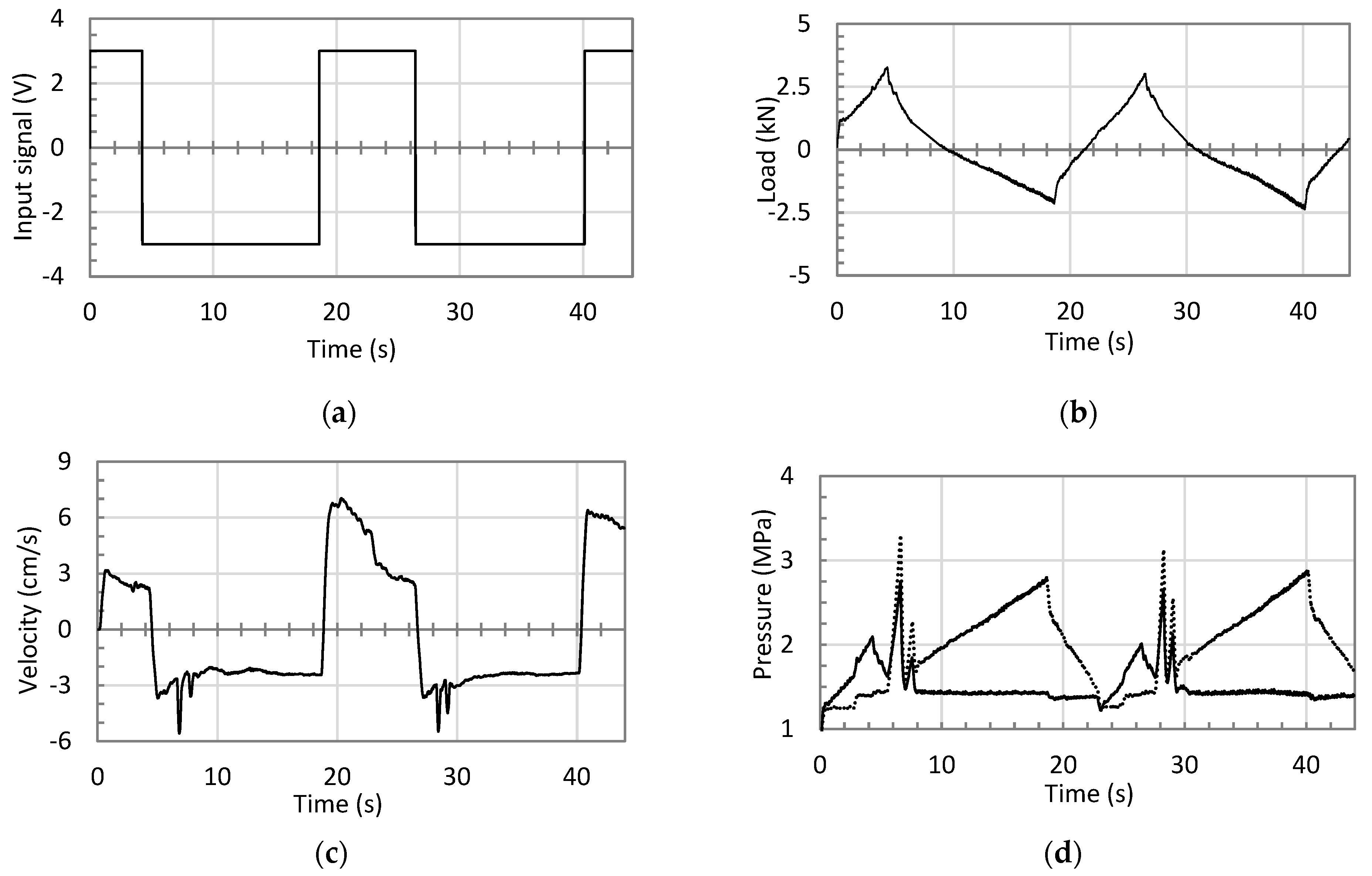
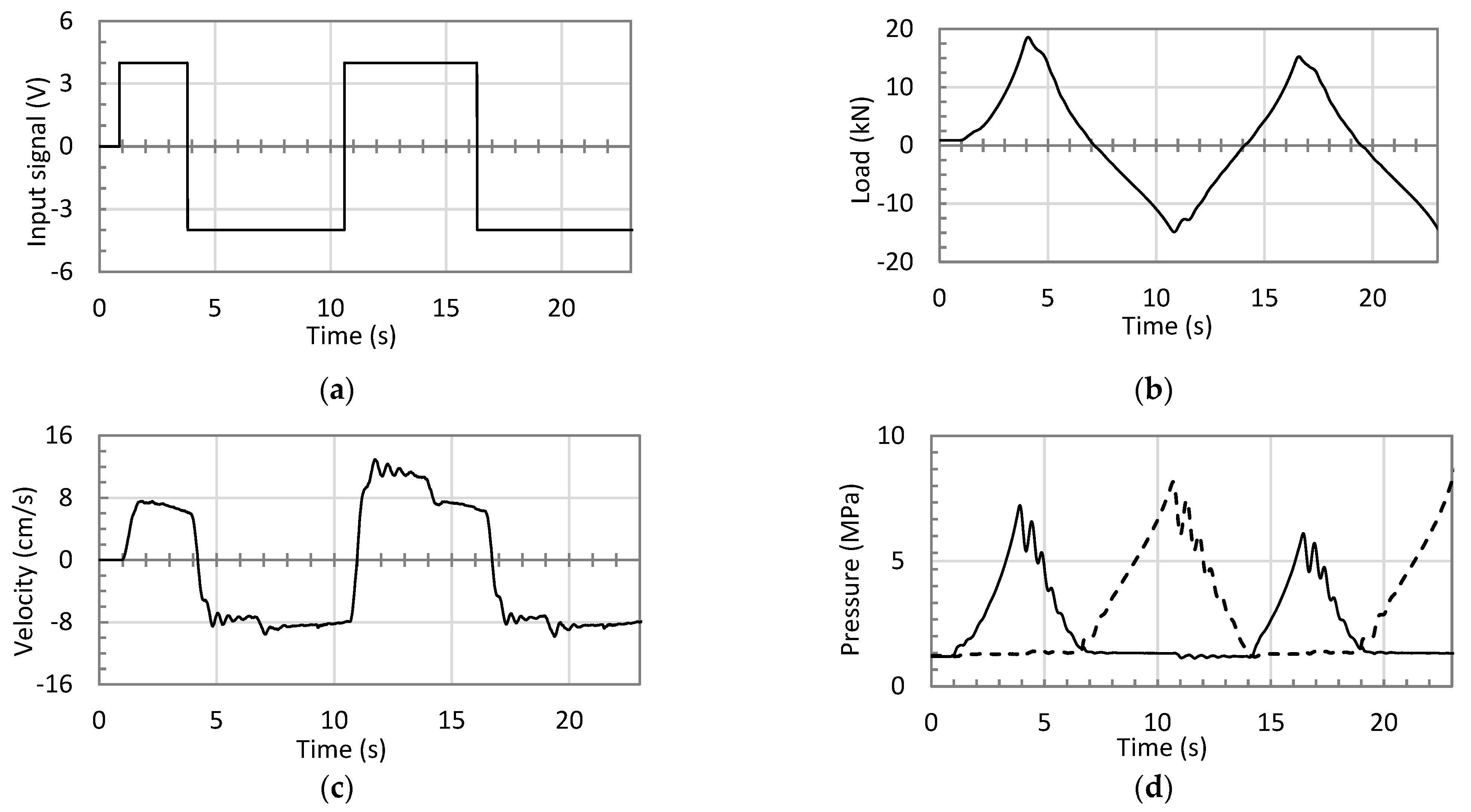
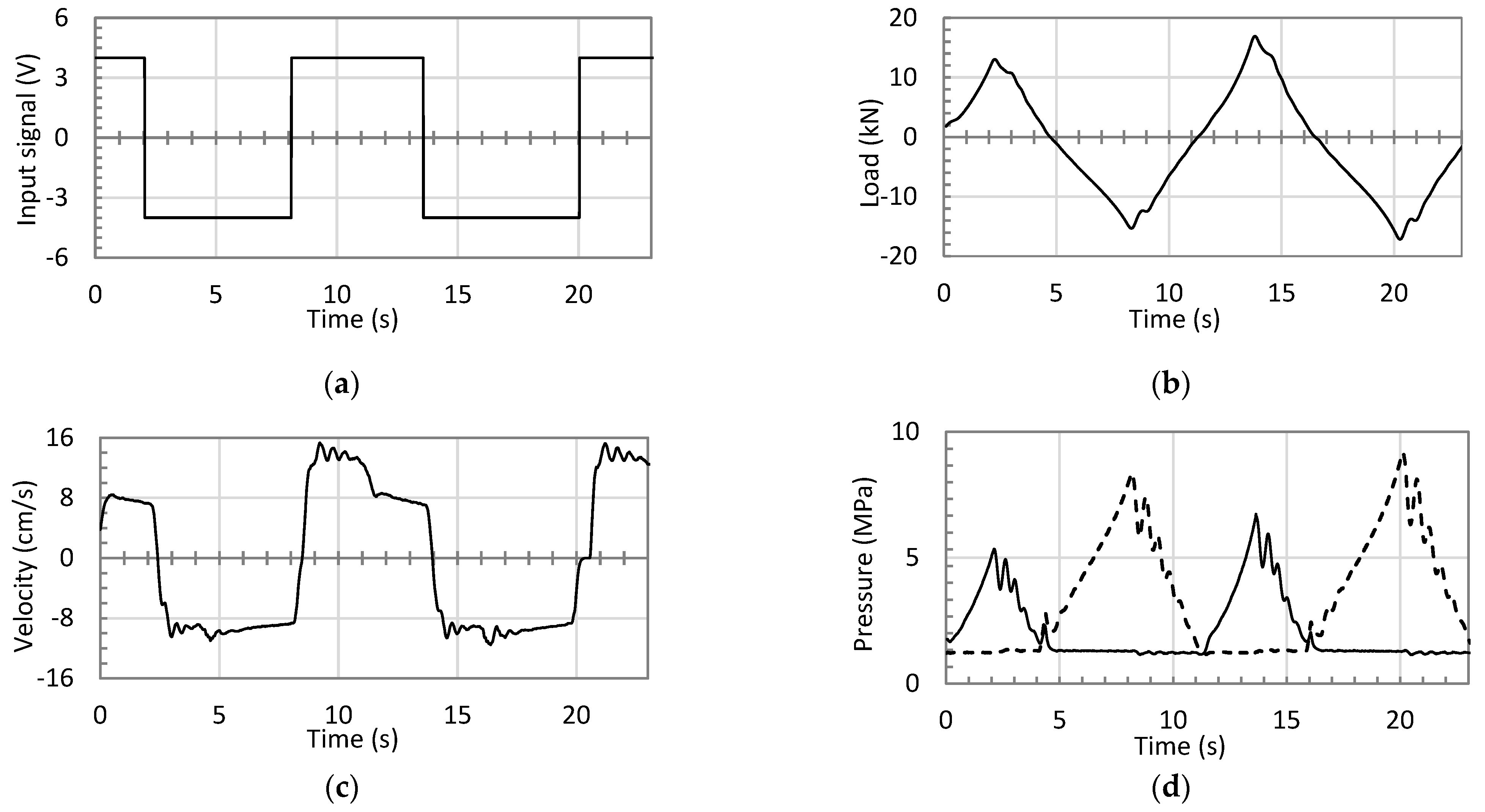
4. Experimental Evaluations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ritelli, G.F.; Vacca, A. Energetic and Dynamic Impact of Counterbalance Valves in Fluid Power Machines. Energy Convers. Manag. 2013, 76, 701–711. [Google Scholar] [CrossRef]
- Zimmerman, J.D.; Pelosi, M.; Williamson, C.A.; Ivantysynova, M. Energy Consumption of an LS Excavator Hydraulic System. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition (IMECE), Seattle, WA, USA, 15–16 January 2007; pp. 12–15. [Google Scholar]
- Goljat, S.; Tič, V.; Lovrec, D. Advantages of Pump Controlled Electro Hydraulic Actuators. In Proceedings of the 7th International Conference of New Technologies, Development and Application, Sarajevo, Bosnia and Herzegovina, 24–26 June 2021. [Google Scholar]
- Rahmfeld, R.; Ivantysynova, M. Developing and Control of Energy Saving Hydraulic Servo Drives. In Proceedings of the Fluid Power Net International Symposium (FPNI-PhD), Hamburg, Germany, 20–22 September 2000; pp. 167–180. [Google Scholar]
- Scherer, M.; Geimer, M.; Weiss, B. Contribution on Control Strategies of Flow-On-Demand Hydraulic Circuits. In Proceedings of the 13th Scandinavian International Conference on Fluid Power, SICFP2013, Linköping, Sweden, 3–5 June 2013. [Google Scholar]
- Hewett, J.A. Hydraulic Circuit Flow Control. U.S. Patent 5,329,767, 19 July 1994. [Google Scholar]
- Hippalgaonkar, R.; Ivantysynova, M. A Series-Parallel Hydraulic Hybrid Mini-Excavator with Displacement Controlled Actuators. In Proceedings of the 13th Scandinavian International Conference on Fluid Power, SICFP2013, Linköping, Sweden, 3–5 June 2013. [Google Scholar]
- Grabbel, J.; Ivantysynova, M. Model Adaptation for Robust Control Design of Hydraulic Joint Servo Actuators. In Proceedings of the 4th International Symposium on Fluid Power Transmission and Control (ICFP 2003), Wuhan, China, 28 August 2003. [Google Scholar]
- Rahmfeld, R.; Ivantysynova, M. Displacement Controlled Linear Actuator with Differential Cylinder-a Way to Save Primary Energy in mobile machines. In Proceedings of the 5th International Conference on Fluid Power Transmission and Control (ICFP 2001), Hangzhou, China, 3–5 April 2001. [Google Scholar]
- Rahmfeld, R. Development and Control of Energy Saving Hydraulic Servo Drives for Mobile Machines. Ph.D. Thesis, TUHH, Hamburg, Germany, 2002. [Google Scholar]
- Williamson, C.; Ivantysynova, M. Pump Mode Prediction for Four quadrant Velocity Control of Valveless Hydraulic Actuators. In Proceedings of the 7th JFPS International Symposium on Fluid Power, Toyama, Japan, 15–16 September 2008; pp. 323–328. [Google Scholar]
- Wang, L.; Book, W.J.; Huggins, J.D. A Hydraulic Circuit for Single Rod Cylinder. J. Dyn. Syst. Meas. Control ASME 2012, 134, 011019. [Google Scholar] [CrossRef]
- Yuming, S.; Imam, A.; Wu, C.; Sepehri, N. Stability Study of a Pump-Controlled Circuit for Single Rod Cylinders via the Concept of Lyapunov Exponents. In Proceedings of the ASME/BATH 2017 Symposium on Fluid Power and Motion Control, Sarasota, FL, USA, 16–19 October 2017. [Google Scholar]
- Caliskan, H.; Balkan, T.; Platin, E.B. A Complete Analysis and a Novel Solution for Instability in Pump Controlled Asymmetric Actuators. J. Dyn. Syst. Meas. Control 2015, 137, 091008. [Google Scholar] [CrossRef]
- Imam, A.; Rafiq, M.; Jalayeri, E.; Sepehri, N. Design, Implementation and Evaluation of a Pump-Controlled Circuit for Single Rod Actuators. Actuators 2017, 6, 10. [Google Scholar] [CrossRef]
- Imam, A.; Sepehri, N. Pump-Controlled Hydraulic Circuits for Operating a Differential Hydraulic Actuator. U.S. Patent 10927856B2, 23 February 2021. [Google Scholar]
- Li, R.; Sun, Q.; Ding, X.; Zhang, Y.; Yuan, W.; Wu, T. Review of Flow-Matching Technology for Hydraulic Systems. MDPI Process. 2022, 10, 2482. [Google Scholar] [CrossRef]
- Imam, A. Pump-Controlled Hydraulic Circuits for Single-Rod Actuators: New Designs and Performance Evaluation; MSpace, University of Manitoba: Winnipeg, MB, Canada, 2020. [Google Scholar]
- Imam, A.; Rafiq, M.; Zeljko, T.; Sepehri, N. Improving the Performance of Pump-Controlled Circuits for Single-Rod Actuator. Actuators 2019, 8, 26. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Definition | Values |
|---|---|---|
| Area of piston cap side | ||
| Area of piston rod side | ||
| Effective bulk modulus | ||
| Charge pressure | ||
| Equivalent mass | ||
| Valve leakage area | ||
| Valve max flow area | ||
| Valve cracking pressure | ||
| Valve maximum opening pressure |
| Performance Index at Critical Zone (S43) | Circuit | |
|---|---|---|
| POCVs | CC-SHV | |
| Mean velocity (cm/s) | −9.8 | −10.4 |
| Oscillation amplitude (cm/s) | ±3.5 | ±5.9 |
| Oscillation frequency (Hz) | 7.5 | 8.5 |
| Critical zone size (ratio) | 1 | 2.25 |
| Main Components | Specification | |
|---|---|---|
| 1 | Actuator cap-side area, area ratio and stroke | 31.67 cm2, 0.75, 55 cm. |
| 2 | Main pump unit | Sauer-Danfoss (42 series), 28 cm3/rev, electrically-controlled variable swash-plate piston pump. |
| 3 | Charge pump unit | Northman (VPVC-F40-A1), 1–2 MPa adjustable van pump. |
| PS | Pressure transducer | Ashcroft, k1 series, 0–20 MPa, accuracy 0.5%. |
| DS | Displacement sensor | Bourns encoder, accuracy 8 μm. |
| POCV | Pilot-operated check valves | Sun-hydraulics CKCB series, 0.2 MPa cracking pressure; 3:1 pilot ratio |
| CC-SHV | Closed-center shuttle valve, | Sun-hydraulics DSCL series, 0.2 MPa cracking pressure. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Imam, A.; Tolba, M.; Sepehri, N. A Comparative Study of Two Common Pump-Controlled Hydraulic Circuits for Single-Rod Actuators. Actuators 2023, 12, 193. https://doi.org/10.3390/act12050193
Imam A, Tolba M, Sepehri N. A Comparative Study of Two Common Pump-Controlled Hydraulic Circuits for Single-Rod Actuators. Actuators. 2023; 12(5):193. https://doi.org/10.3390/act12050193
Chicago/Turabian StyleImam, Ahmed, Mohamed Tolba, and Nariman Sepehri. 2023. "A Comparative Study of Two Common Pump-Controlled Hydraulic Circuits for Single-Rod Actuators" Actuators 12, no. 5: 193. https://doi.org/10.3390/act12050193