
A Gripper-like Exoskeleton Design for Robot Grasping Demonstration

Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Devices | Advantages | Disadvantages | Literature |
|---|---|---|---|
| Exoskeleton | Represent human grasping skills; Capable to carry various sensor | Complex structure; Heavy | [8,9,12] |
| VR device | Immersive operation | The generalization from VR devices to robot end-effector | [13,14] |
| Data glove | Compact and lightweight | Less applicable to 2-finger grasping | [15,16] |
| Motion capture system | Highly accurate | Affected by occlusion, expensive | [17] |
2. Mechanical Design
2.1. Design Features
- The exoskeleton should have a similar configuration to the robot gripper to simplify the correspondence between the robot and the exoskeleton so that it effectively reflects the grasping movements of the user.
- The usage of the exoskeleton should be intuitive for the user to perform the demonstrations.
- The exoskeleton should be ergonomic to improve comfort and operational stability.
- Important data of grasping demonstrations, such as the position and posture of the exoskeleton and the displacement of the gripper should be recorded using various sensing methods and processed by a compatible data collection system.
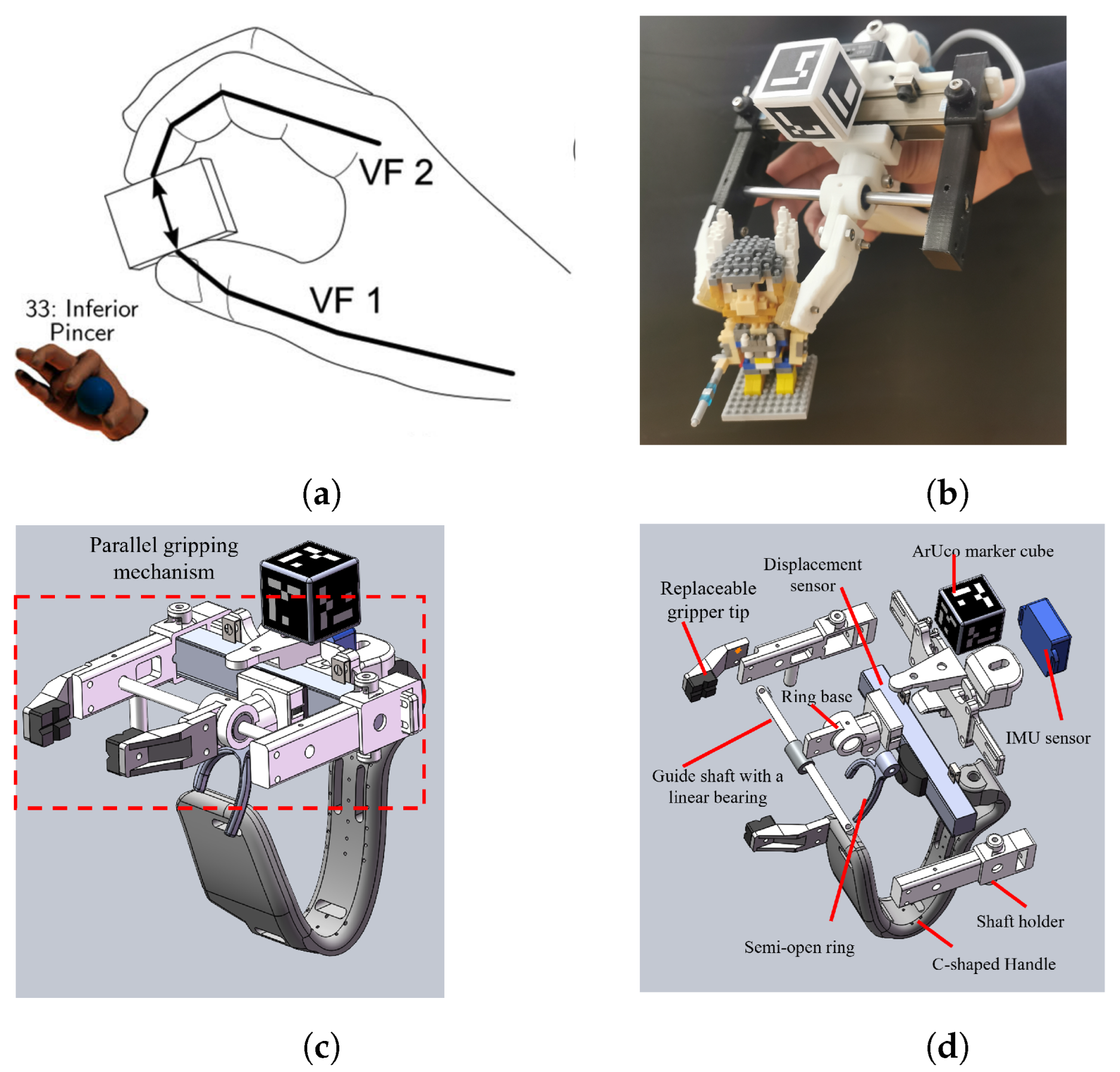
2.2. Parallel Gripping Mechanism
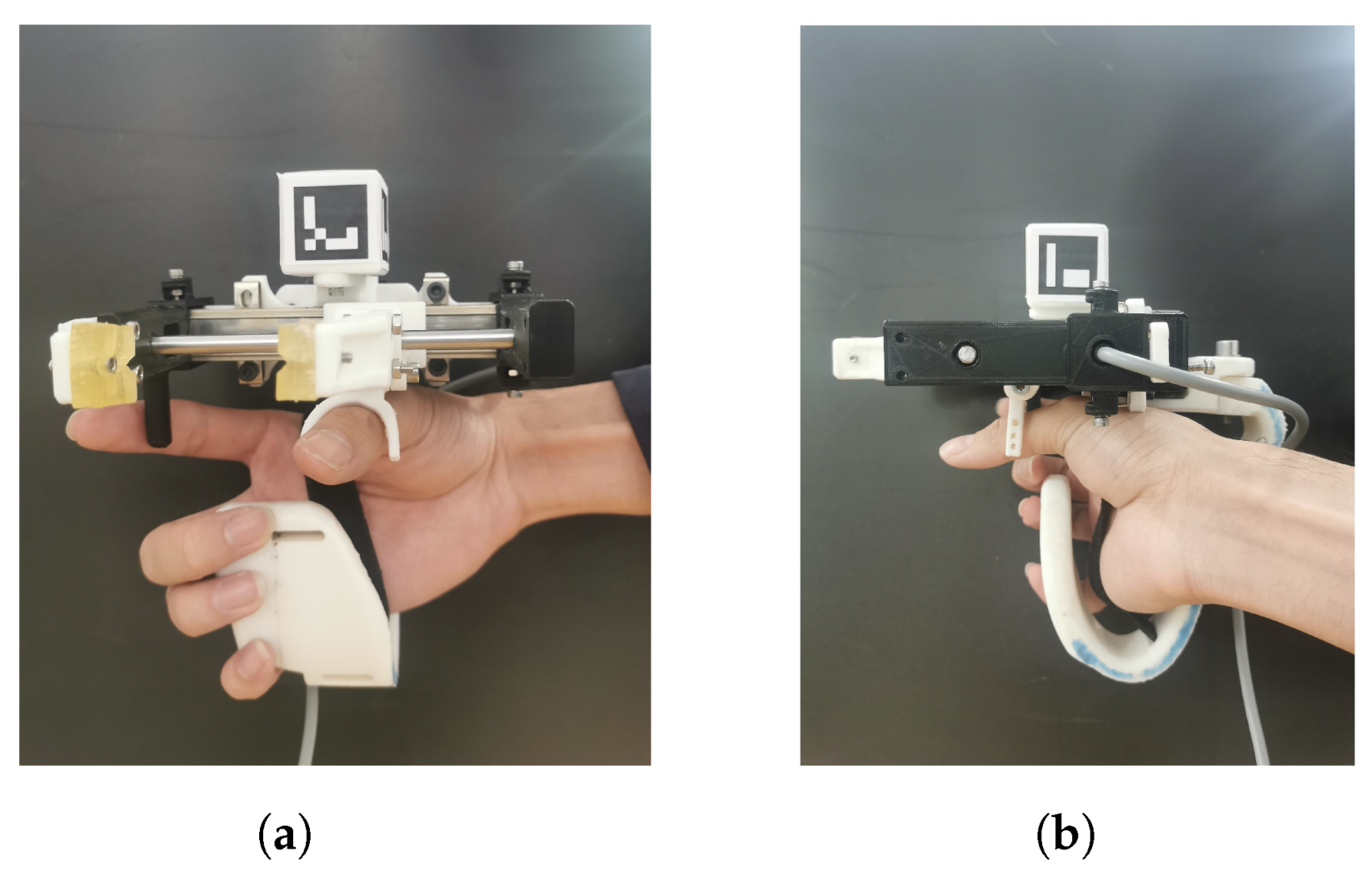
2.3. C-Shaped Handle
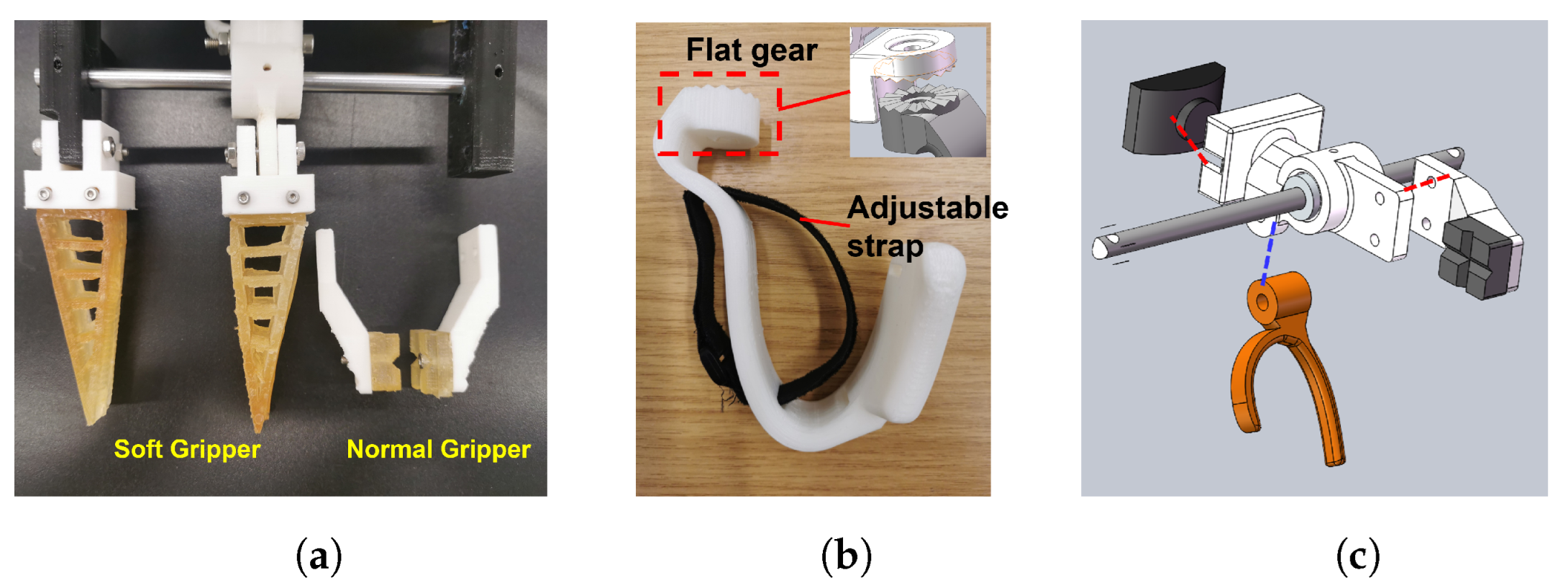
2.4. Design Modification
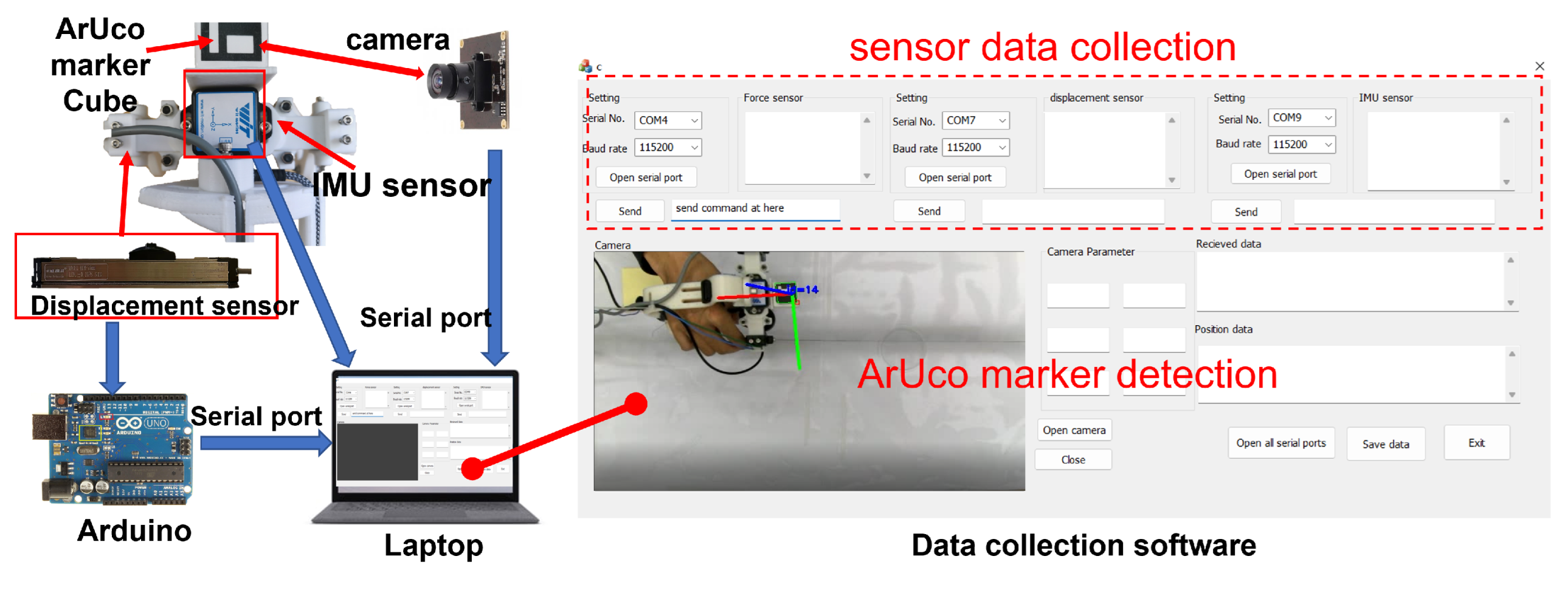
3. Motion Tracking and Data Collection System
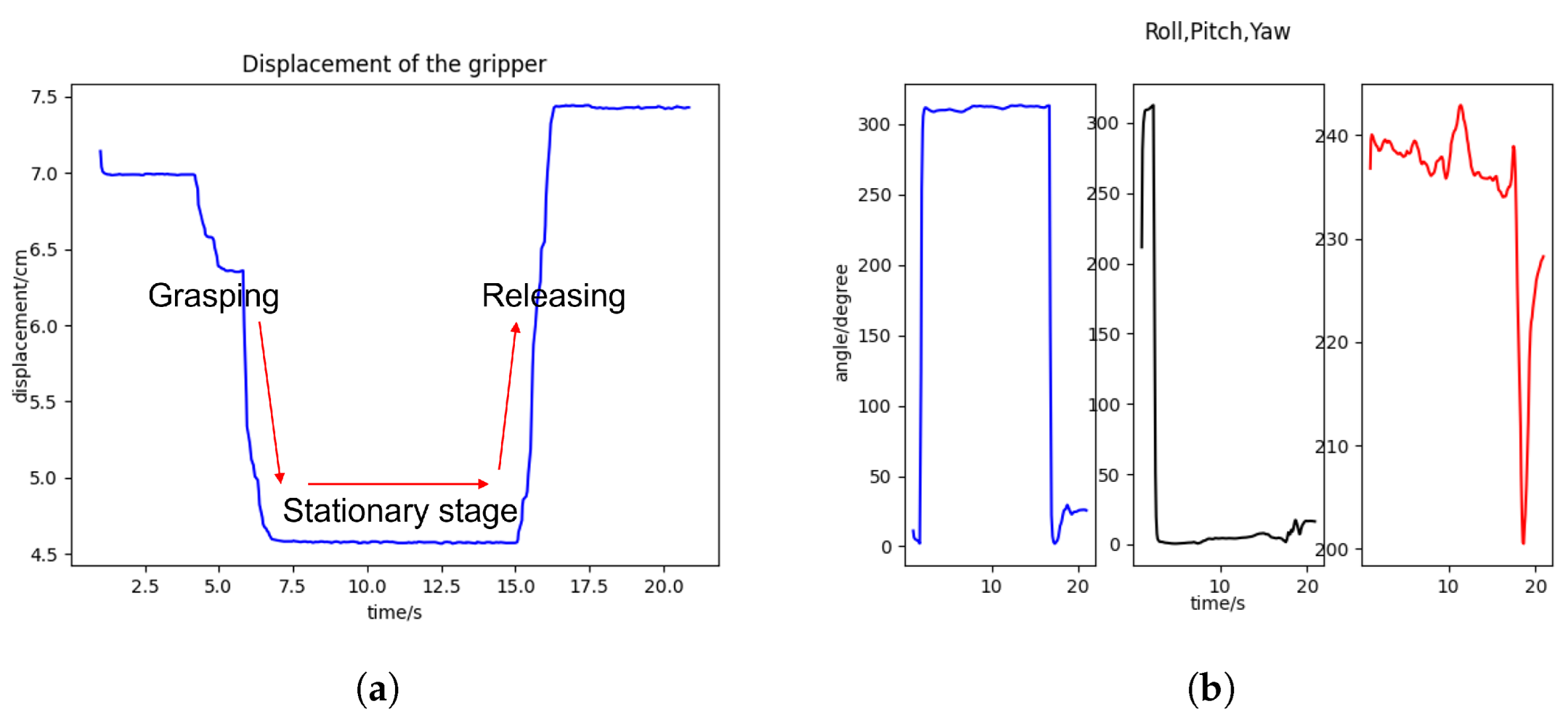
3.1. Gripper Displacement
3.2. Pose Estimation
3.3. Position Estimation
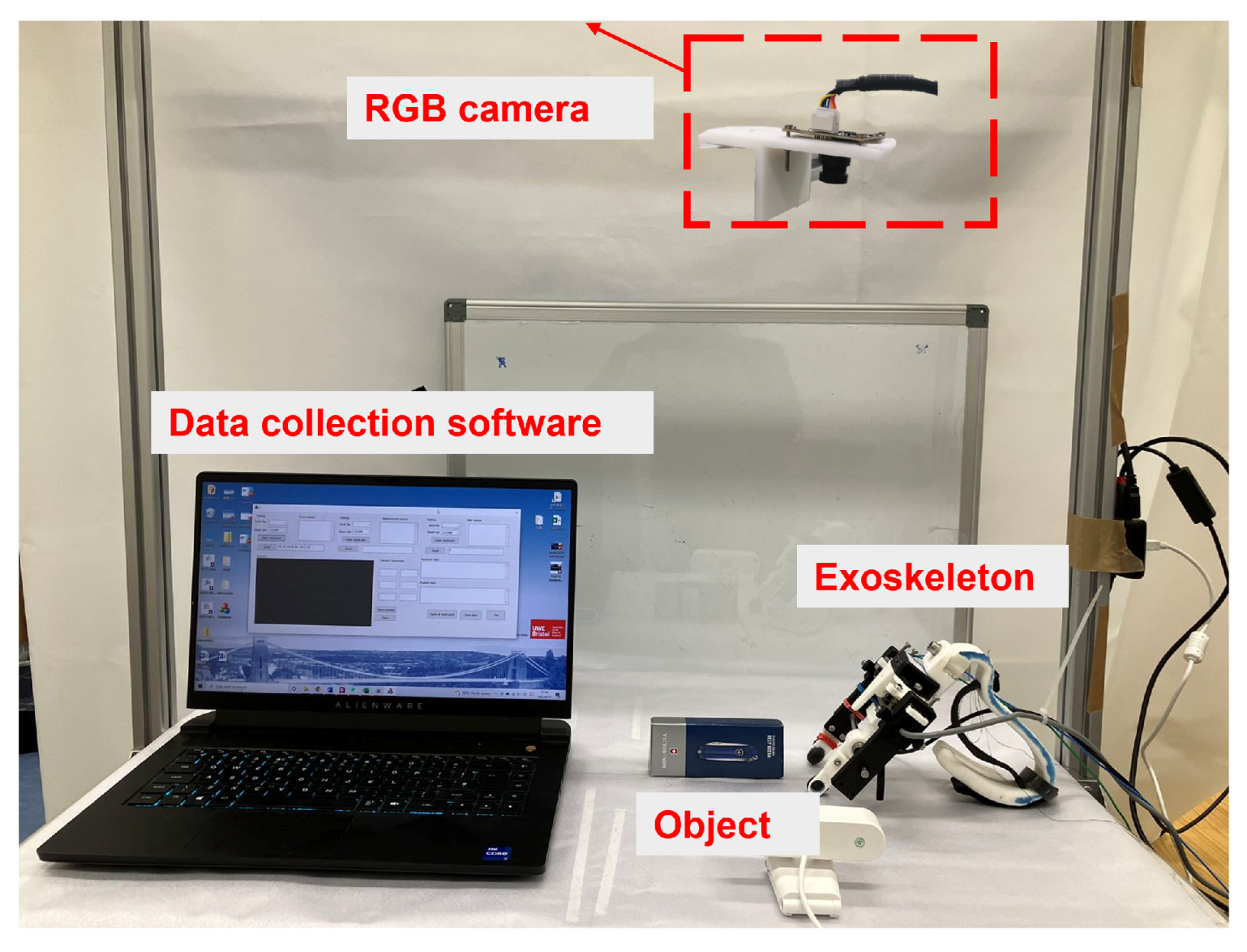
3.4. Data Collection
4. Learning from Demonstration
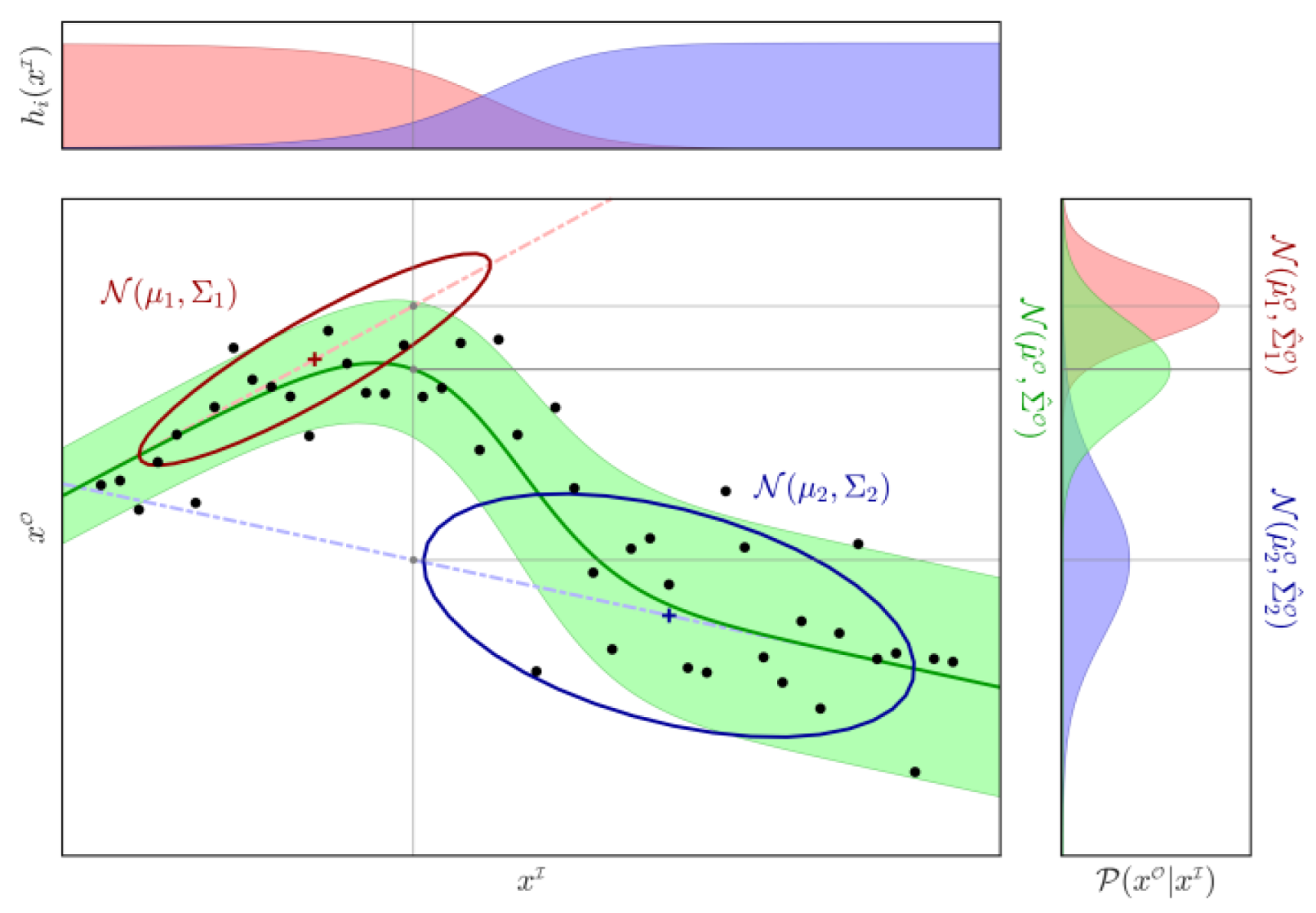
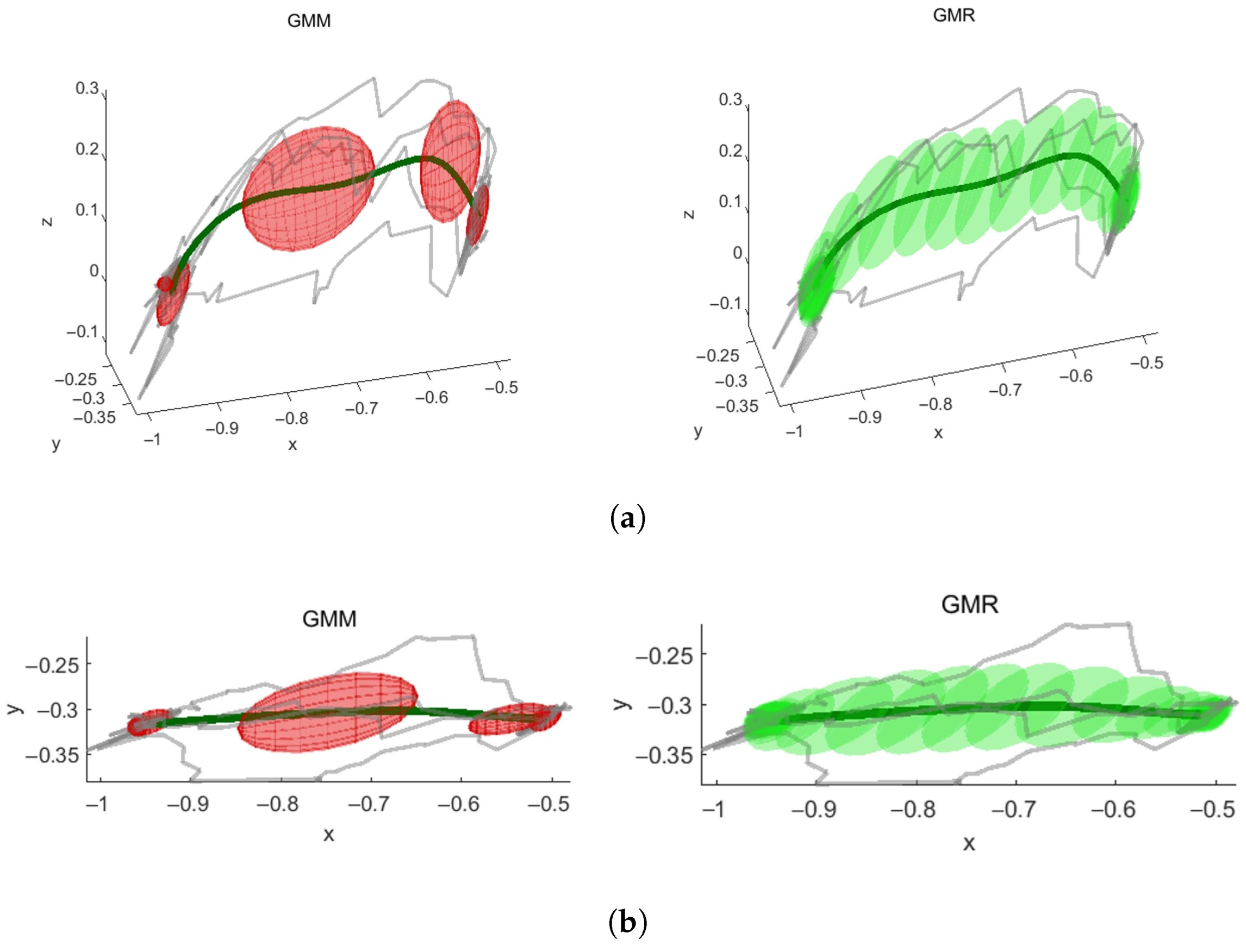
4.1. Motion Representation Encoded by GMM and GMR
4.1.1. Gaussian Mixture Models
4.1.2. Gaussian Mixture Regression
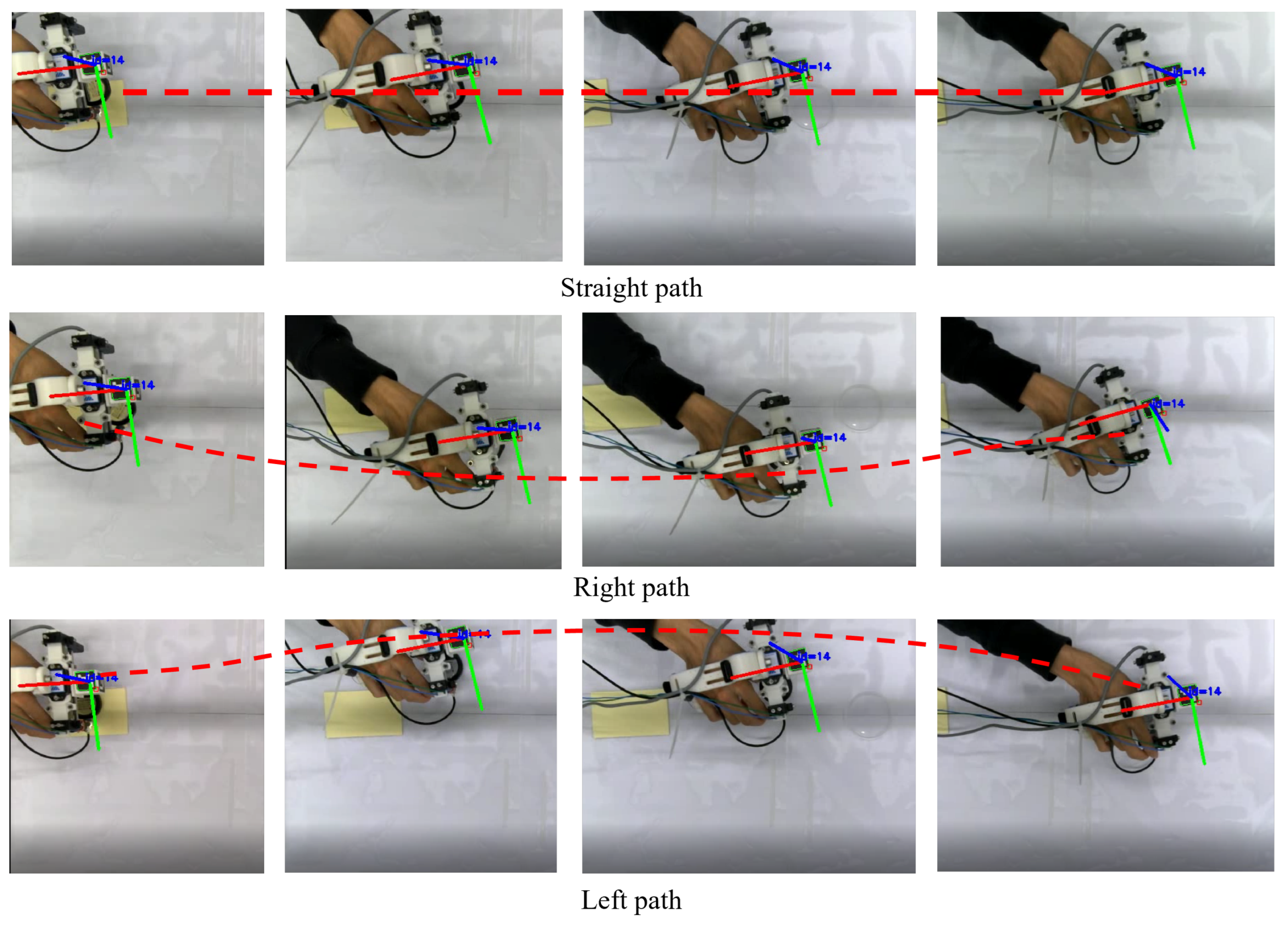
5. Trajectory Learning and Reproduction
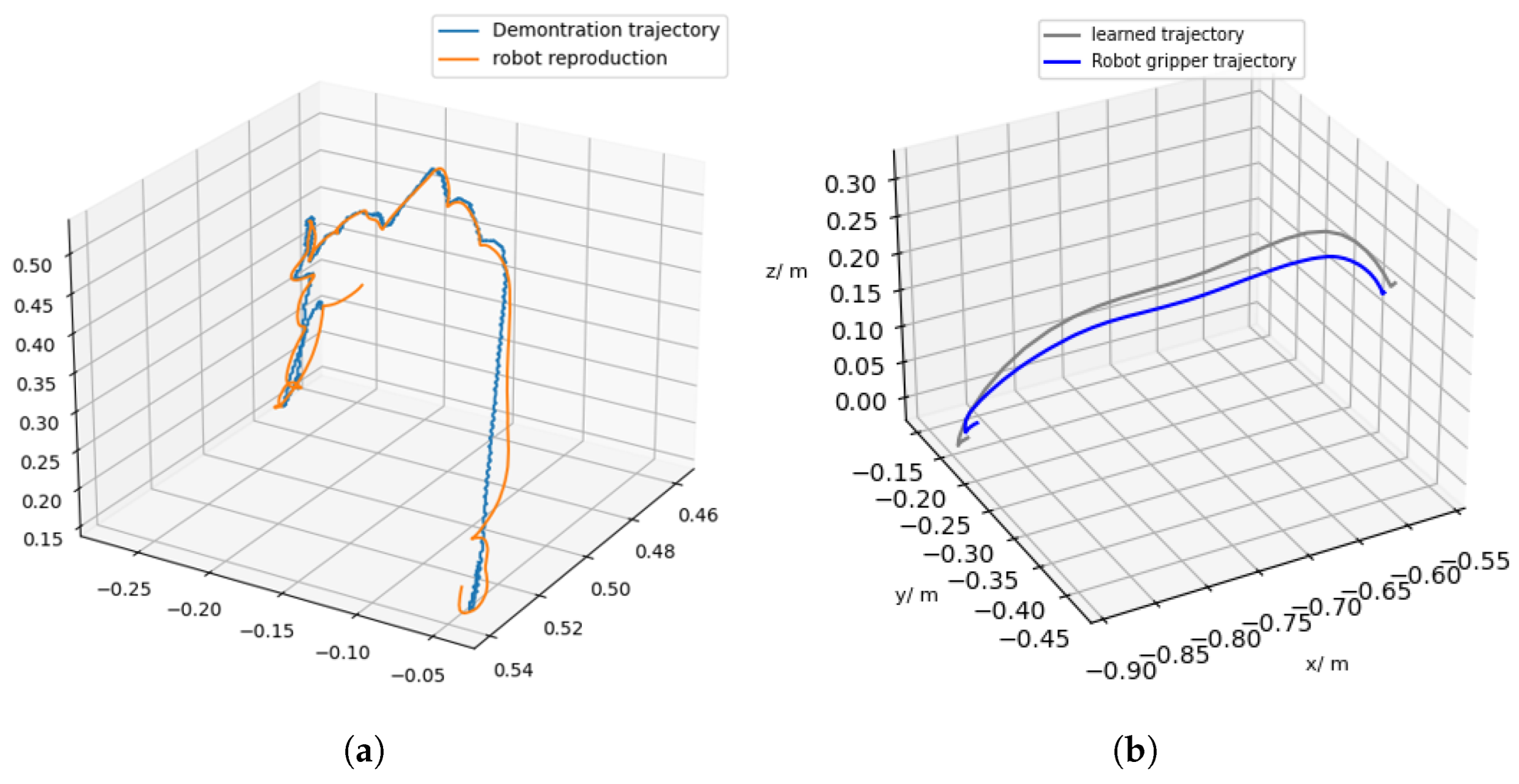
5.1. Trajectory Learning Based on GMR
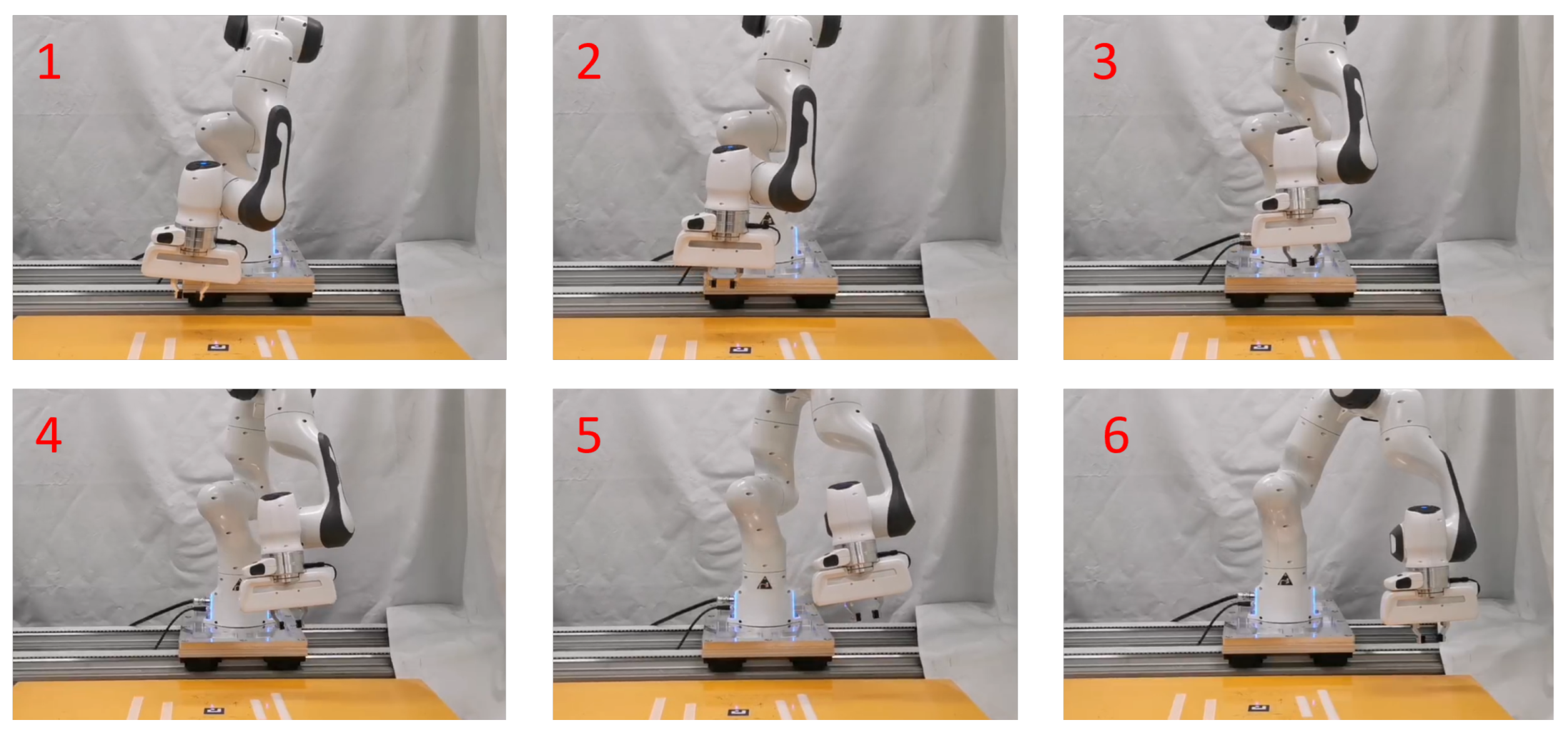
5.2. Trajectory Reproduction on Franka Emika Robot
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhu, Z.; Hu, H. Robot learning from demonstration in robotic assembly: A survey. Robotics 2018, 7, 17. [Google Scholar] [CrossRef] [Green Version]
- Xu, S.; Ou,, Y.; Duan, J.; Wu, X.; Feng, W.; Liu, M. Robot trajectory tracking control using learning from demonstration method. Neurocomputing 2019, 338, 249–261. [Google Scholar] [CrossRef]
- Ravichandar, H.; Polydoros, A.S.; Chernova, S.; Billard, A. Recent Advances in Robot Learning from Demonstration: Annual Review of Control. Robot. Auton. Syst. 2020, 3, 297–330. [Google Scholar] [CrossRef] [Green Version]
- Duque, D.; Prieto, F.; Hoyos, J. Trajectory generation for robotic assembly operations using learning by demonstration. Robot. Comput. Integr. Manuf. 2019, 57, 292–302. [Google Scholar] [CrossRef]
- Argall, B.D.; Chernova, S.; Veloso, M.; Browning, B. A survey of robot learning from demonstration. Robot. Auton. Syst. 2009, 57, 469–483. [Google Scholar] [CrossRef]
- Yang, C.; Zhang, J.; Chen, Y.; Dong, Y.; Zhang, Y. A Review of exoskeleton-type systems and their key technologies. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2008, 222, 1599–1612. [Google Scholar] [CrossRef]
- Gopura, R.; Kiguchi, K.; Bandara, D. A brief review on upper extremity robotic exoskeleton systems. In Proceedings of the 2011 sixth International Conference on Industrial and Information Systems, Kandy, Sri Lanka, 6–19 August 2011. [Google Scholar]
- Sarakoglou, I.; Brygo, A.; Mazzanti, D.; Hernandez, N.G.; Caldwell, D.G.; Tsagarakis, N.G. Hexotrac: A highly under-actuated hand exoskeleton for finger tracking and force feedback. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016. [Google Scholar]
- Amirpour, E.; Fesharakifard, R.; Ghafarirad, H.; Mehdi Rezaei, S.; Saboukhi, A.; Savabi, M.; Rahimi Gorji, M. A novel hand exoskeleton to enhance fingers motion for tele-operation of a robot gripper with force feedback. Mechatronics 2022, 81, 102695. [Google Scholar] [CrossRef]
- Osorio, V.R.; Iyenga, R.; Yao, Y.; Bhattachan, P.; Ragobar, A.; Dey, N.; Tripp, B. 37,000 Human-Planned Robotic Grasps with Six Degrees of Freedom. IEEE Robot. Autom. Lett. 2020, 5, 3346–3351. [Google Scholar] [CrossRef]
- Song, S.; Zeng, A.; Lee, J.; Funkhouser, T. Grasping in the wild: Learning 6dof closed-loop grasping from low-cost demonstrations. IEEE Robot. Autom. Lett. 2020, 5, 4978–4985. [Google Scholar] [CrossRef]
- Pastor, P.; Hoffmann, H.; Asfour, T.; Schaal, S. Learning and generalization of motor skills by learning from demonstration. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, 12–17 May 2009; pp. 763–768. [Google Scholar]
- Dyrstad, J.S.; Mathiassen, J.R. Grasping virtual fish: A step towards robotic deep learning from demonstration in virtual reality. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, Macao, 5–8 December 2017; pp. 1181–1187. [Google Scholar]
- Zhang, T.; McCarthy, Z.; Jow, O.; Lee, D.; Chen, X.; Goldberg, K.; Abbeel, P. Deep Imitation Learning for Complex Manipulation Tasks from Virtual Reality Teleoperation. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 5–8 December 2017; pp. 5628–5635. [Google Scholar]
- Edmonds, M.; Gao, F.; Xie, X.; Liu, H.; Qi, S.; Zhu, Y.; Rothrock, B.; Zhu, S.C. Feeling the force: Integrating force and pose for fluent discovery through imitation learning to open medicine bottles. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3530–3537. [Google Scholar]
- Fang, B.; Sun, F.; Liu, H.; Guo, D.; Chen, W.; Yao, G. Robotic teleoperation systems using a wearable multimodal fusion device. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417717057. [Google Scholar] [CrossRef]
- Ruppel, P.; Zhang, J. Learning Object Manipulation with Dexterous Hand-Arm Systems from Human Demonstration. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 10 February 2021; pp. 5417–5424. [Google Scholar]
- Dai, H.; Lu, Z.; He, M.; Yang, C. Novel Gripper-like Exoskeleton Design for Robotic Grasping based on Learning from Demonstration. In Proceedings of the 2022 27th International Conference on Automation and Computing (ICAC), Bristol, UK, 1–3 September 2022; pp. 1–6. [Google Scholar]
- Ekvall, S.; Kragic, D. Grasp Recognition for Programming by Demonstration. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 748–753. [Google Scholar]
- Aleotti, J.; Caselli, S. Grasp recognition in virtual reality for robot pregrasp planning by demonstration. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 5–19 May 2006; pp. 2801–2806. [Google Scholar]
- Lin, Y.; Sun, Y. Grasp planning based on strategy extracted from demonstration. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 4458–4463. [Google Scholar]
- Jones, L.A.; Lederman, S.J. Human Hand Function; Oxford University Press: Oxford, UK, 2006. [Google Scholar]
- Feix, T.; Romero, J.; Schmiedmayer, H.-B.; Dollar, A.M.; Kragic, D. The GRASP Taxonomy of Human Grasp Types. IEEE Trans. Hum. Mach. Syst. 2016, 46, 66–77. [Google Scholar] [CrossRef]
- Shin, J.H.; Park, J.G.; Kim, D.I.; Yoon, H.S. A Universal Soft Gripper with the Optimized Fin Ray Finger. Int. J. Precis. Eng. Manuf. Green Technol. 2021, 8, 889–899. [Google Scholar] [CrossRef]
- Harih, G.; Dolšak, B. Tool-handle design based on a digital human hand model. Int. J. Ind. Ergon. 2013, 43, 288–295. [Google Scholar] [CrossRef]
- Garrido-Jurado, S.; Muñoz-Salinas, R.; Madrid-Cuevas, F.J. Automatic generation and detection of highly reliable fiducial markers under occlusion. Pattern Recognit. 2014, 47, 2280–2292. [Google Scholar] [CrossRef]
- Lightweight Cross-Platform Serial Port Library Based on c++. Available online: https://github.com/itas109/CSerialPort (accessed on 15 November 2022).
- Using the Single Camera Calibrator App. Available online: https://www.mathworks.com/help/vision/ug/using-the-single-camera-calibrator-app.html (accessed on 11 January 2023).
- Calinon, S. Mixture Models for the Analysis, Edition, and Synthesis of Continuous Time Series. In Mixture Models for the Analysis, Edition, and Synthesis of Continuous Time Series; Bouguila, N., Fan, W., Eds.; Springer: Berlin/Heidelberg, Germany, 2019; pp. 39–57. [Google Scholar]
- Si, W.; Wang, N.; Yang, C. A review on manipulation skill acquisition through teleoperation-based learning from demonstration. Cogn. Comput. Syst. 2021, 3, 1–16. [Google Scholar] [CrossRef]
- Misimi, E.; Olofsson, A.; Eilertsen, A.; Øye, E.R.; Mathiassen, J.R. Robotic Handling of Compliant Food Objects by Robust Learning from Demonstration. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 6972–6979. [Google Scholar]











| Components | Earlier Design | Modified Design | Remarks |
|---|---|---|---|
| Replaceable gripper | Adjustable during grasping | Fixed | Improved stability |
| Finger ring | Closed ring (max width 1.7 cm) | Semi-opened ring (max width 2.3 cm) | Fit with thumb shape |
| The base of finger ring | Number of parts: 3 | Number of parts: 1 | Compact design |
| Handle | Scalloped-shaped handle (width 2.73 cm) | C-shaped handle (width 4.9 cm) | Wider space for thumb motion, larger contact area |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, H.; Lu, Z.; He, M.; Yang, C. A Gripper-like Exoskeleton Design for Robot Grasping Demonstration. Actuators 2023, 12, 39. https://doi.org/10.3390/act12010039
Dai H, Lu Z, He M, Yang C. A Gripper-like Exoskeleton Design for Robot Grasping Demonstration. Actuators. 2023; 12(1):39. https://doi.org/10.3390/act12010039
Chicago/Turabian StyleDai, Hengtai, Zhenyu Lu, Mengyuan He, and Chenguang Yang. 2023. "A Gripper-like Exoskeleton Design for Robot Grasping Demonstration" Actuators 12, no. 1: 39. https://doi.org/10.3390/act12010039