Dynamic Displacement of an Aluminum Frame Using Close Range Photogrammetry

 , and
, and
Abstract
:1. Introduction
Dynamic Displacements Using CRP
2. Materials and Methods
Numerical Model: 3-D Frame under Dynamic Linear Load Model
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chopra, A.K. Dynamics of Structures, 4th ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2007. [Google Scholar]
- Roncella, R.; Romeo, E.; Barazzetti, L.; Gianinetto, M.; Scaioni, M. Comparative Analysis of Digital Image Correlation Techniques for In-plane Displacement Measurements. In Proceedings of the 5th International Congress on Image and Signal Processing (CISP 2012), Chongqing, China, 16–18 October 2012. [Google Scholar]
- Ackermann, F. Digital Image Correlation: Performance and Potential Application in Photogrammetry. Photogramm. Rec. 1984, 11, 429–439. [Google Scholar] [CrossRef]
- Razavi, M.R.; Pourkand, A.; Mojtabai, N. Challenges in Determination of Brazilian Test Rock Specimens Surface Displacements by Using Digital Image Cross-Correlation. In Proceedings of the 48th US Rock Mechanics, Minneapolis, MN, USA, 1–4 June 2014. [Google Scholar]
- Pourkand, A. Determination of Micro Displacement Fields on the Rock Surface Using Digital Image Correlation. Master’s Thesis, New Mexico Institute of Mining and Technology, Socorro, NM, USA, 2014. [Google Scholar]
- Abanto-Bueno, J.; Lambros, J. Investigation of crack growth in functionally graded materials using digital image correlation. Eng. Fract. Mech. 2002, 14–16, 1695–1711. [Google Scholar] [CrossRef]
- Ramos, T.; Furtado, A.; Eslami, S.; Alves, S.; Rodrigues, H.; Arede, A.; Tavares, P.J.; Moreira, P. 2D and 3D Digital Image Correlation in Civil Engineering-Measurements in a Masonry Wall. In Proceedings of the 1st International Conference on Structural Integrity, Madeira, Portugal, 1–4 September 2015. [Google Scholar]
- Yoneyama, S.; Kitagawa, A.; Iwata, S.; Tani, K.; Kikuta, H. Bridge Deflection Measurement Using Digital Image Correlation. Exp. Tech. 2007, 34–40, 258–290. [Google Scholar] [CrossRef]
- Mikhail, E.; Bethel, J.; McGlone, J. Introduction to Modern Photogrammetry; John Wiley and Sons: Hoboken, NJ, USA, 2001. [Google Scholar]
- Pourkand, A.; Salas, C.; Regalado, J.; Bhakta, K.; Tufaro, R.; Mercer, D.; Grow, D. Objective Evaluation of Motor Skills for Orthopedic Residents Using a Motion Tracking Drill System: Outcomes of an ABOS Approved Surgical Skills Training Program. Iowa Orthop. J. 2016, 36, 13–19. [Google Scholar] [PubMed]
- Schmidt, T.; Tyson, J.; Revilock, D.M.; Padula, S.; Pereira, J.M.; Melis, M.; Lyle, K. Performance Verification of 3D Image Correlation Using Digital High-Speed Cameras. In Proceedings of the SEM Annual Conference & Exposition on Experimental and Applied Mechanics, Portland, OR, USA, 7–9 June 2005. [Google Scholar]
- Ghaychi Afrouz, S. Application of Close Range Photogrammetry (CRP) in Dynamic Displacement Measurement of Structures. Master’s Thesis, New Mexico Institute of Mining and Technology, Socorro, NM, USA, 2014. [Google Scholar]
- Ohnishi, Y.; Nishiyama, S.; Yano, T.; Matsuyama, H. A study of the application of digital photogrammetry to slope monitoring systems. Int. J. Rock Mech. Min. Sci. 2006, 43, 756–766. [Google Scholar] [CrossRef]
- Salvini, R.; Francioni, M.; Riccucci, S.; Bonciani, F. Photogrammetry and laser scanning for analyzing slope stability and rock fall runout along the Domodossola-Iselle railway, the Italian Alps. Geomorphology 2013, 185, 110–112. [Google Scholar] [CrossRef]
- David, W.; Take, W.; Bolton, M.; Munauchen, S. A deformation measuring system for geotechnical testing based on digital imaging, close range photogrammetry and PIV image analysis. In 15th International Conference on Soil Mechanics and Geotechnical Engineering; AA Balkema Publishers: Lisse, The Netherlands, 2001; pp. 539–542. [Google Scholar]
- Dunn, M.L. Recent developments in close range photogrammetry for mining and reclamation. In Proceedings of the America Society of Mining and Reclamation, Billings, MT, USA, 30 May–5 June 2009; pp. 390–399. [Google Scholar]
- Rezaei, S. Application of Close Range Photogrammetry to Monitor Displacements in Mines. Ph.D. Thesis, New Mexico Institute of Mining and Technology, Socorro, NM, USA, 2012. [Google Scholar]
- Lato, M.; Kemeny, J.; Harrap, R.M.; Bevan, G. Rock bench: Establishing a common repository and standards for assessing rock mass characteristics using LiDAR and photogrammetry. Comput. Geosci. 2013, 50, 106–114. [Google Scholar] [CrossRef]
- Carrivick, J.L.; Smith, M.W. Fluvial and aquatic applications of Structure from Motion photogrammetry and unmanned aerial vehicle/drone technology. Wiley Interdiscip. Rev. Water 2019, 6, 1328. [Google Scholar] [CrossRef]
- Lee, H.; Rhee, H. 3-D measurement of structural vibration using digital close-range photogrammetry. Sens. Actuators 2013, 196, 63–69. [Google Scholar] [CrossRef]
- Choi, H.; Cheung, J.; Kim, S.; Ahn, J. Structural Dynamic Displacement Vision System Using Digital Image Processing. NDT E Int. 2011, 44, 597–608. [Google Scholar] [CrossRef]
- Ozbek, M.; Rixen, D.; Erne, O.; Sanow, G. Feasibility of Monitoring Large Wind Turbines Using Photogrammetry. Energy 2010, 35, 4802–4811. [Google Scholar] [CrossRef]
- Lee, H.; Rhee, H.; Jae Hong, O.; Jin Ho, P. Measurement of 3-D Vibrational Motion by Dynamic Photogrammetry Using Least-Square Image Matching for Sub-Pixel Targeting to Improve Accuracy. Sensors 2016, 16, 359. [Google Scholar] [CrossRef] [PubMed]
- Baqersad, J.; Poozesh, P.; Niezrecki, C.; Avitabile, P. Photogrammetry and optical methods in structural dynamics—A review. Mech. Syst. Signal Process. 2017, 86, 17–34. [Google Scholar] [CrossRef]
- Kavzoglu, T.; Karsli, F. Calibration of a Digital Single Lens Reflex (SLR) Camera Using Artificial Neural Networks. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 27–32. [Google Scholar]
- PhotoModeler. The Manuals and Guides Help Files of Photomodeler; EOS Systems Inc.: Boston, MA, USA, 2013. [Google Scholar]
- Xu, W.; Liu, Z.; Nie, H. The Algorithm of Measuring in Close-Range Photogrammetry based on Grid. Trans Tech Publ. 2012, 759–759, 542–545. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
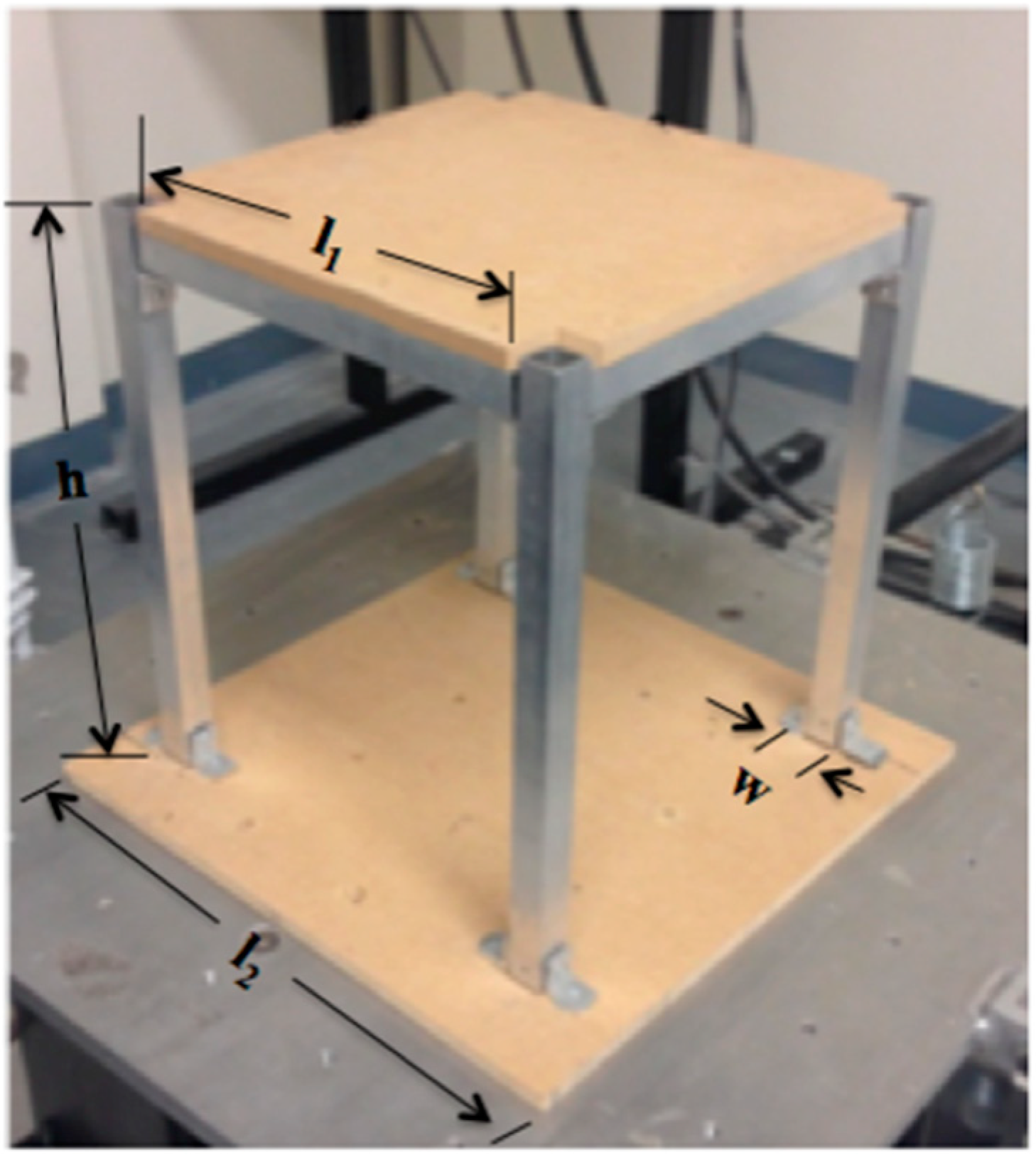
| Dimension | Length (cm) |
|---|---|
| l1 | 29.85 |
| l2 | 45.72 |
| w | 2.54 |
| h | 40.64 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghaychi Afrouz, S.; Razavi, M.R.; Pourkand, A.; Mara Dias Wilson, C. Dynamic Displacement of an Aluminum Frame Using Close Range Photogrammetry. Buildings 2019, 9, 176. https://doi.org/10.3390/buildings9080176
Ghaychi Afrouz S, Razavi MR, Pourkand A, Mara Dias Wilson C. Dynamic Displacement of an Aluminum Frame Using Close Range Photogrammetry. Buildings. 2019; 9(8):176. https://doi.org/10.3390/buildings9080176
Chicago/Turabian StyleGhaychi Afrouz, Setareh, Mohammad Reza Razavi, Ashkan Pourkand, and Claudia Mara Dias Wilson. 2019. "Dynamic Displacement of an Aluminum Frame Using Close Range Photogrammetry" Buildings 9, no. 8: 176. https://doi.org/10.3390/buildings9080176