

Damage Detection of Gantry Crane with a Moving Mass Using Artificial Neural Network

 ,
,  , , and
, , and
Abstract
:1. Introduction
2. Gantry Crane Modeling
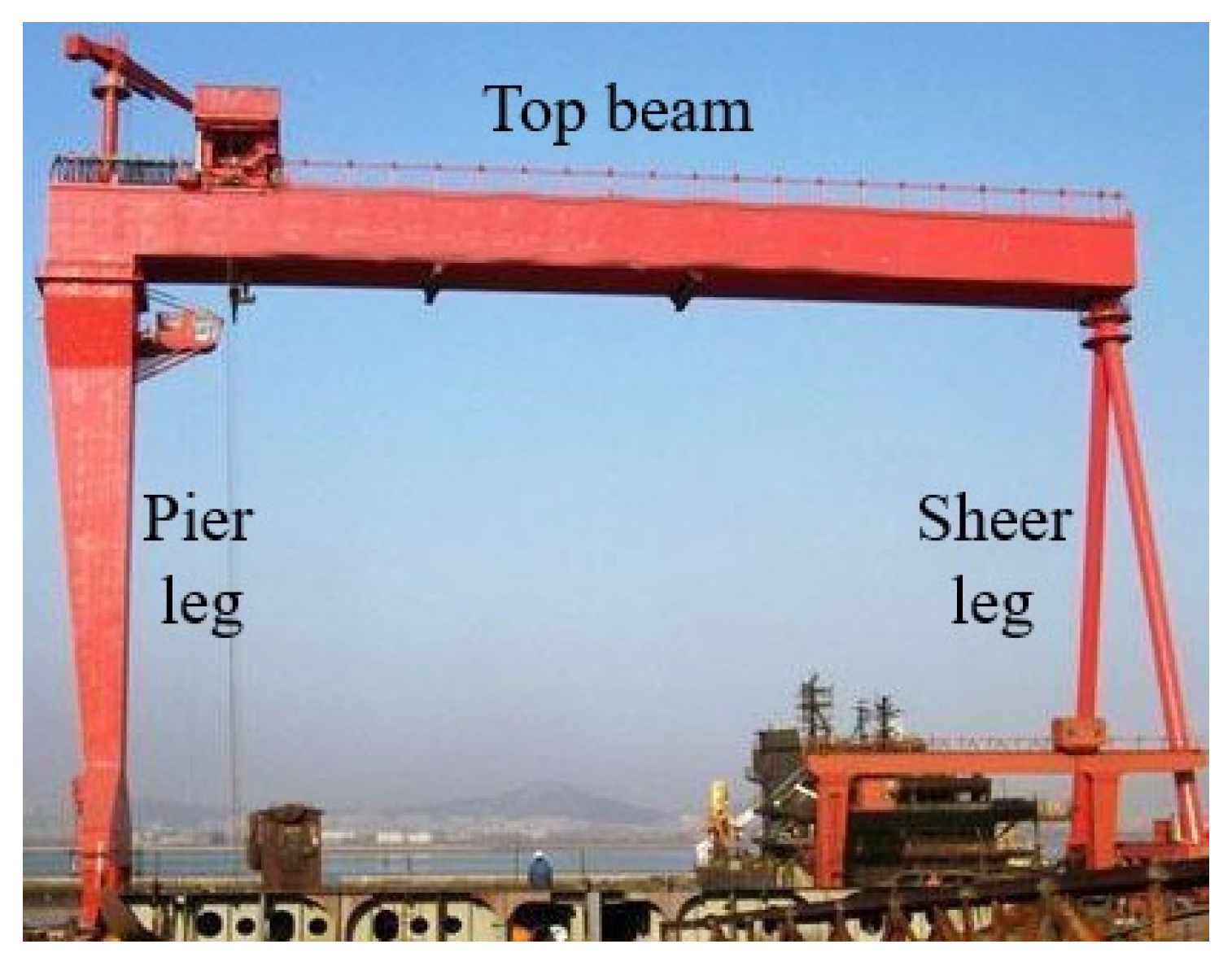
2.1. Gantry Crane
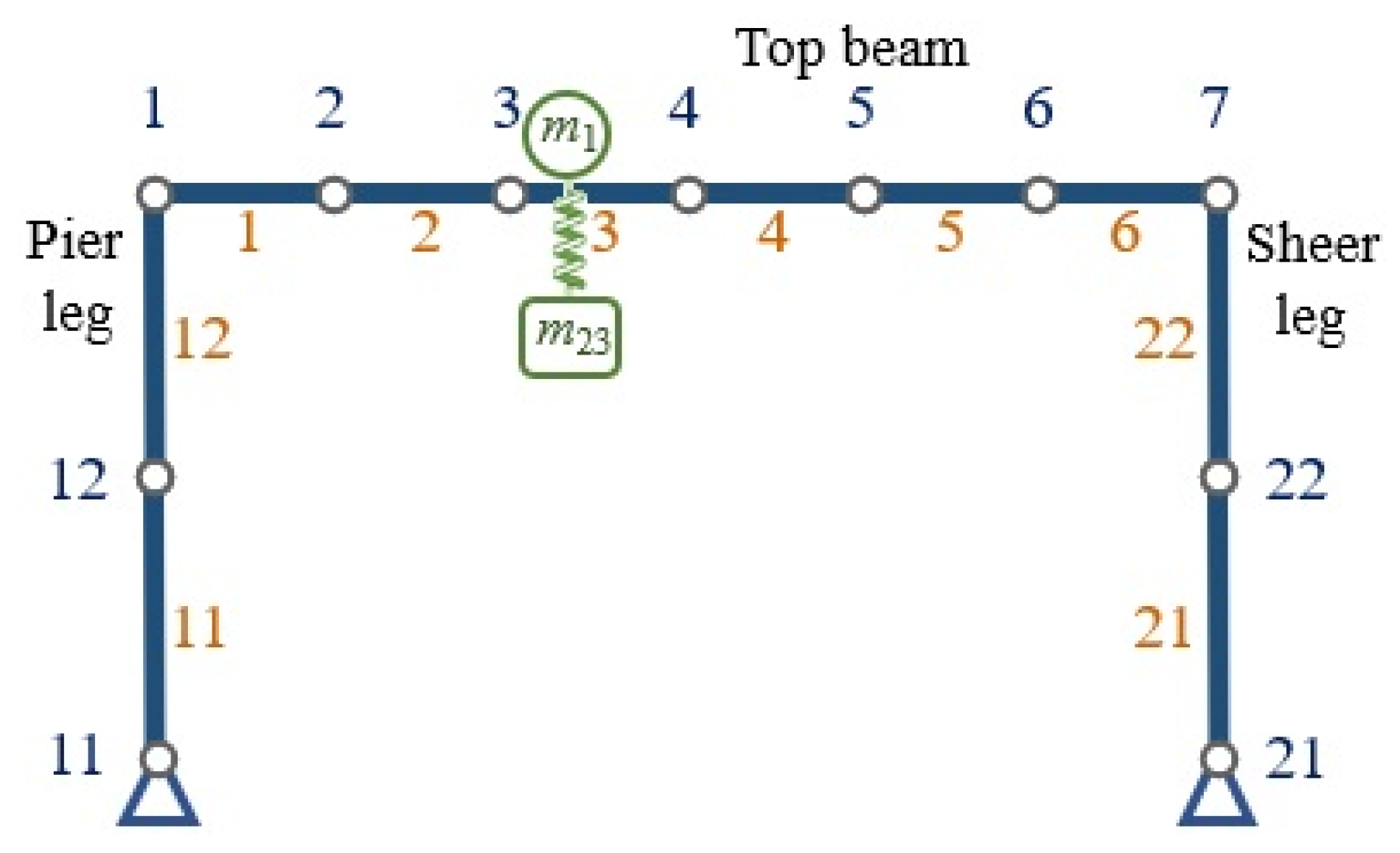
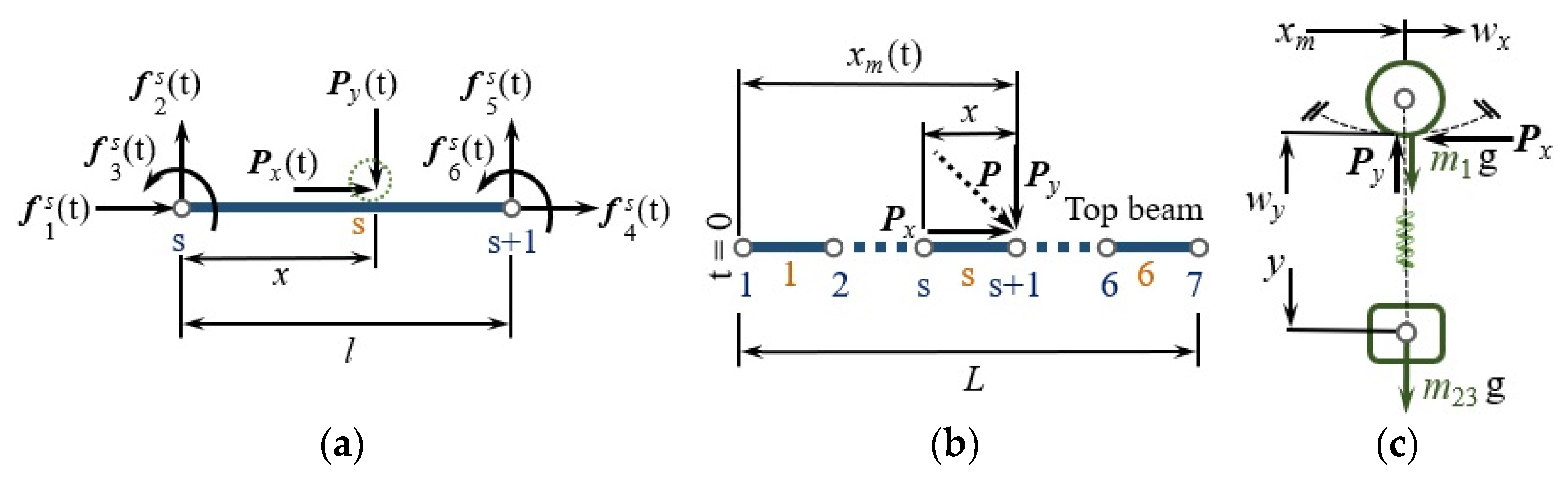
2.2. Gantry Crane Dynamic Model
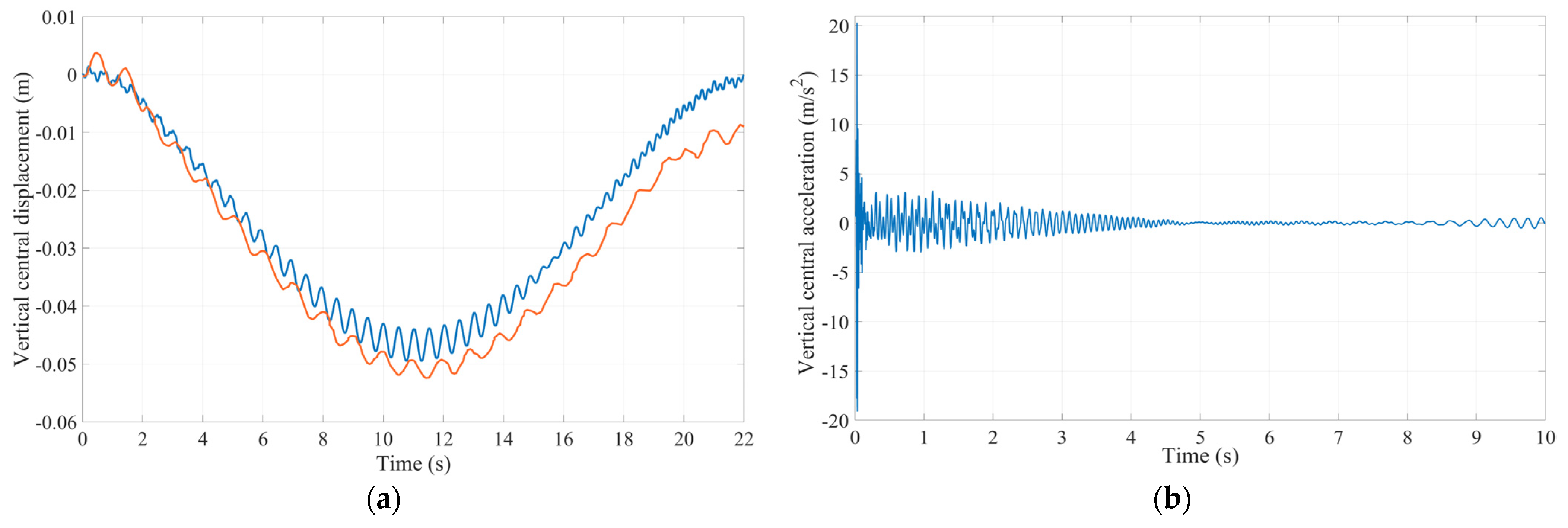
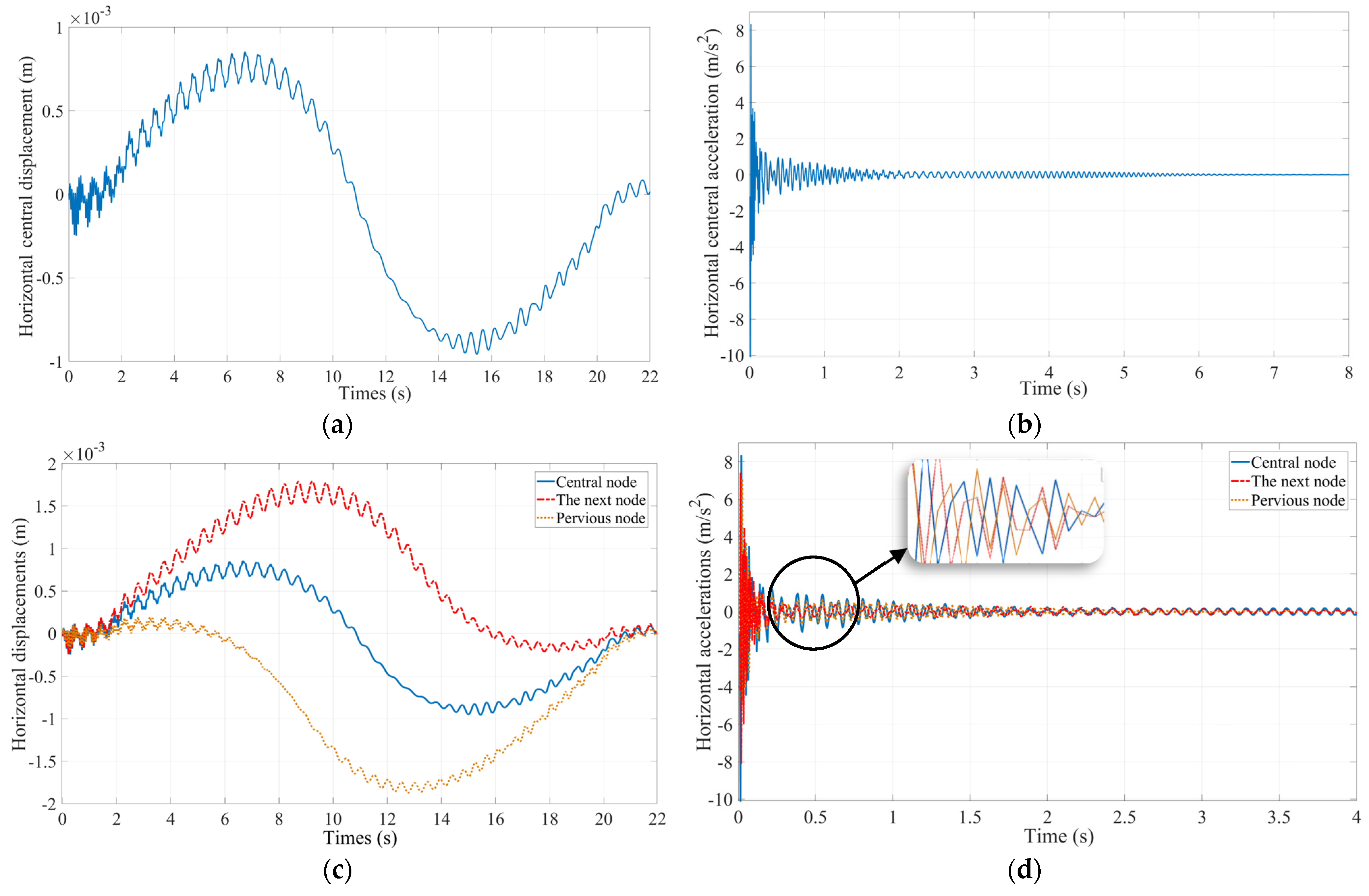
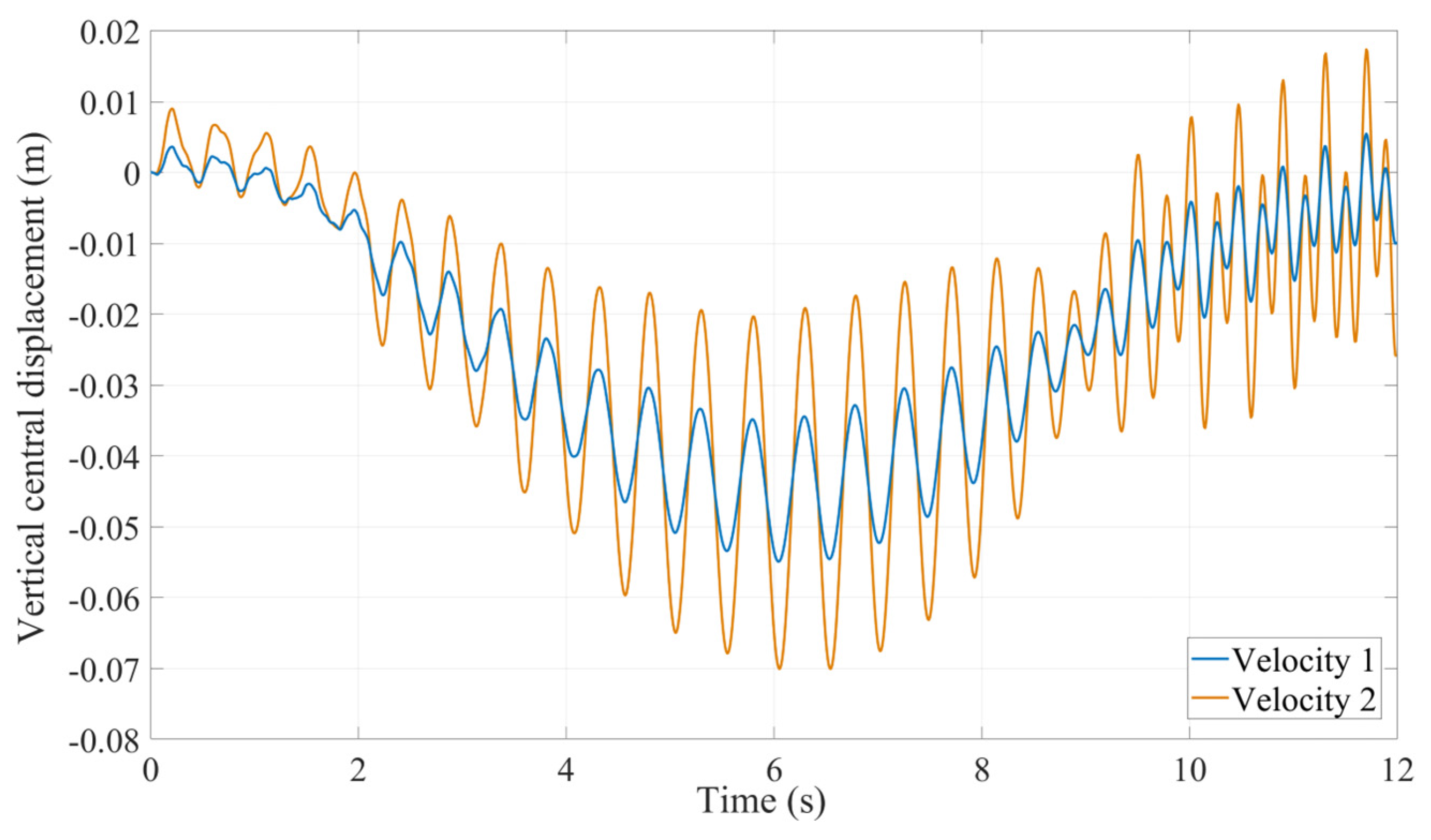
2.3. Model Evaluation
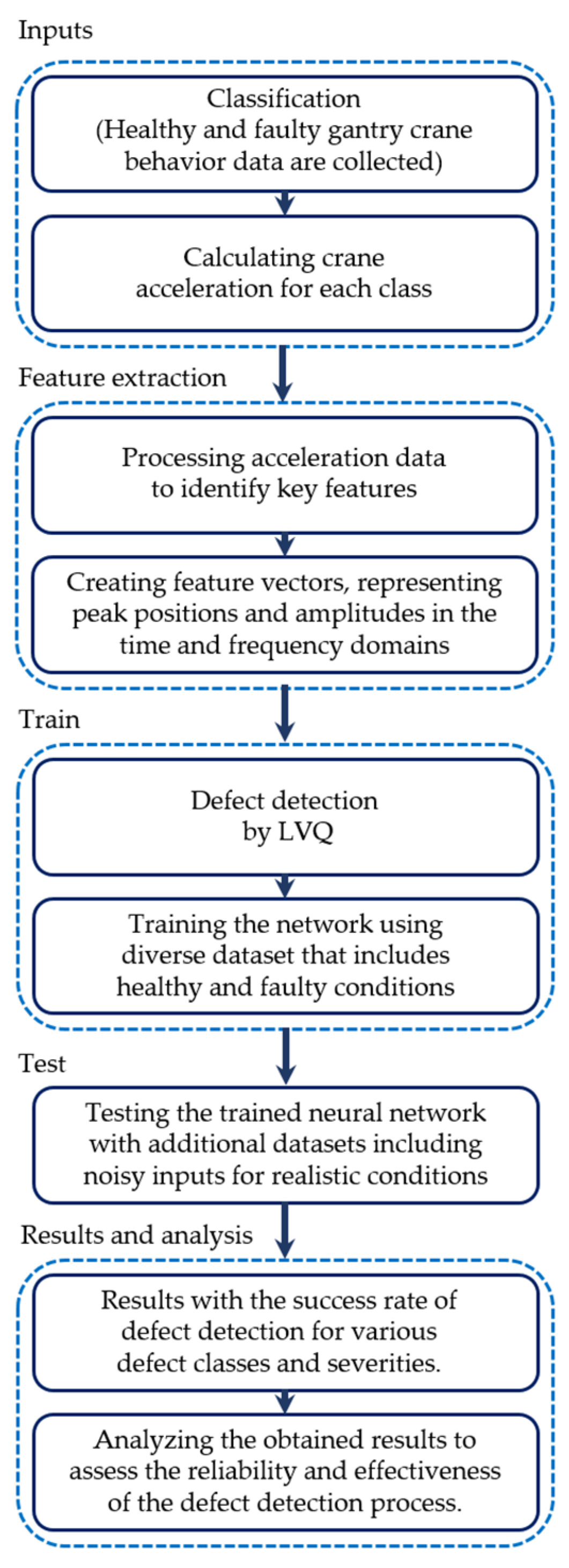
3. Defect Detection Process
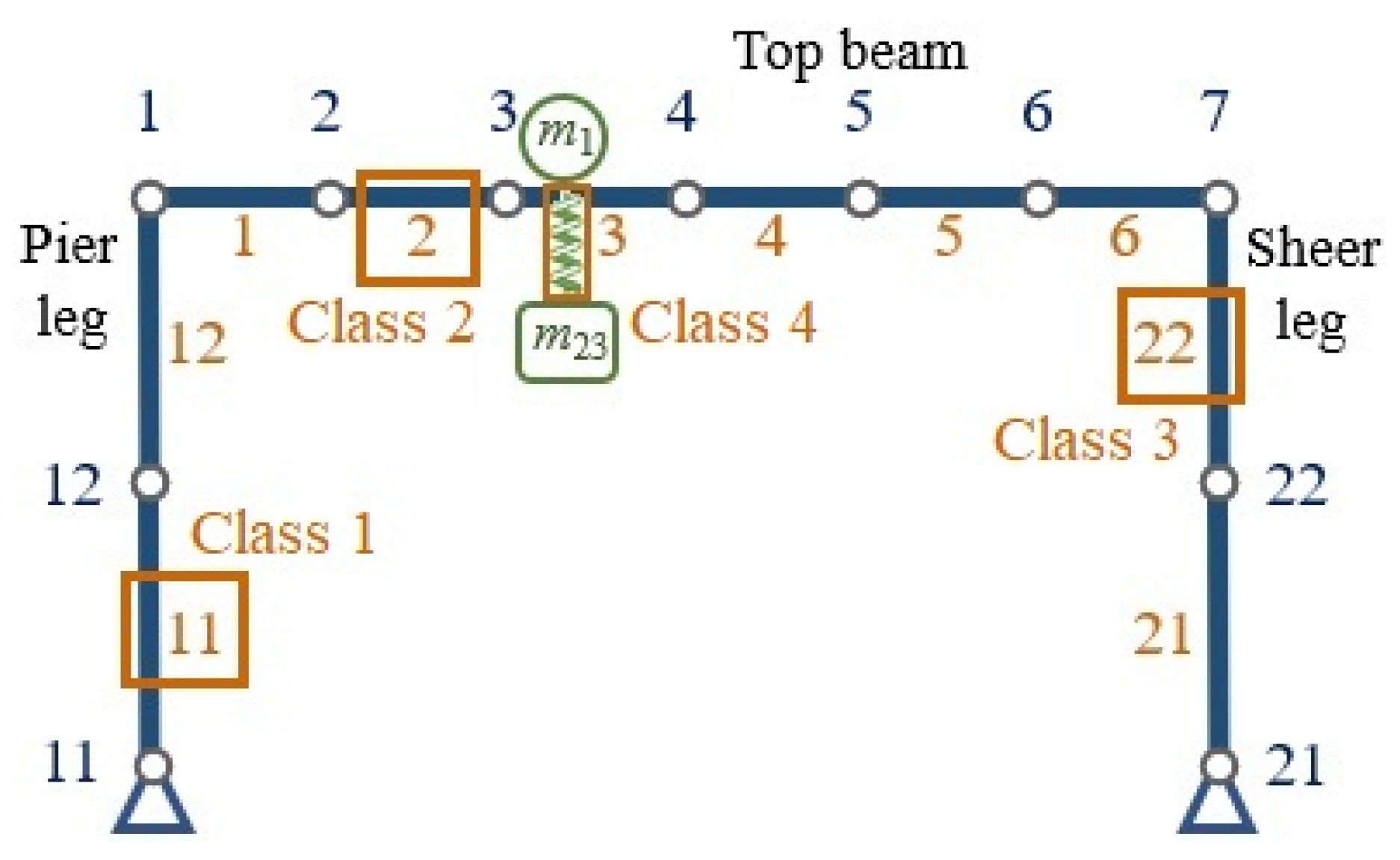
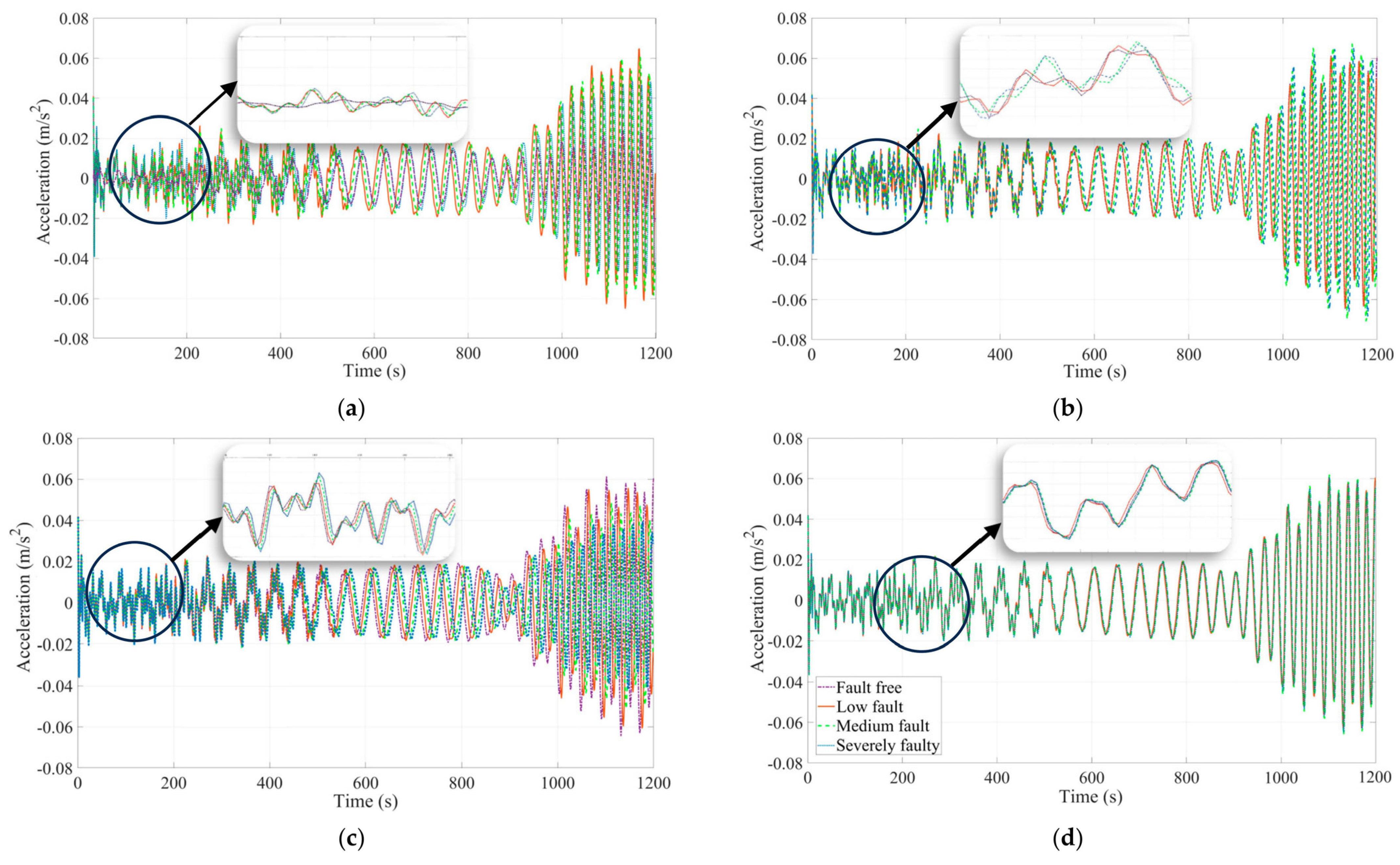
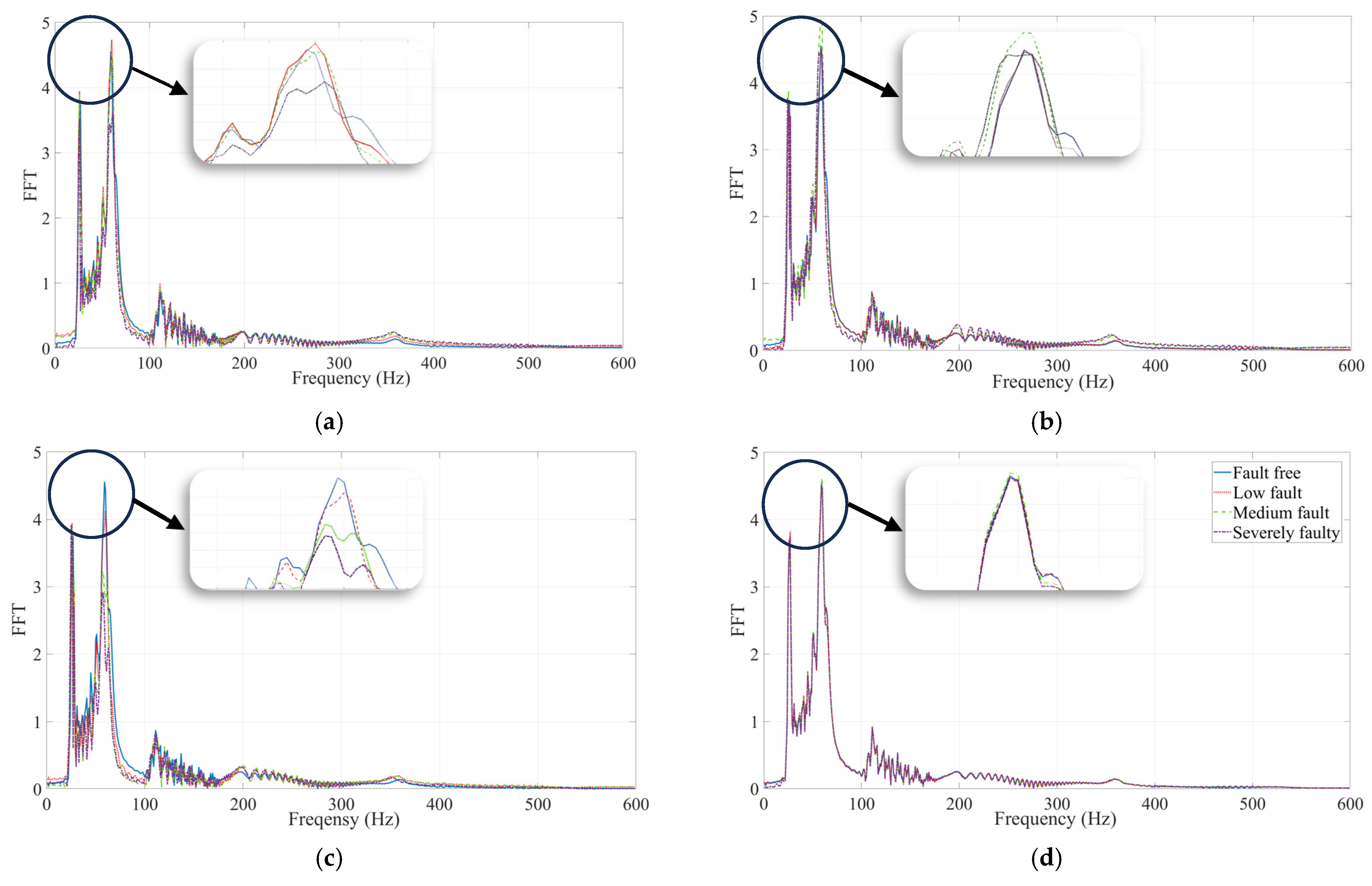
3.1. Making Defects in the System
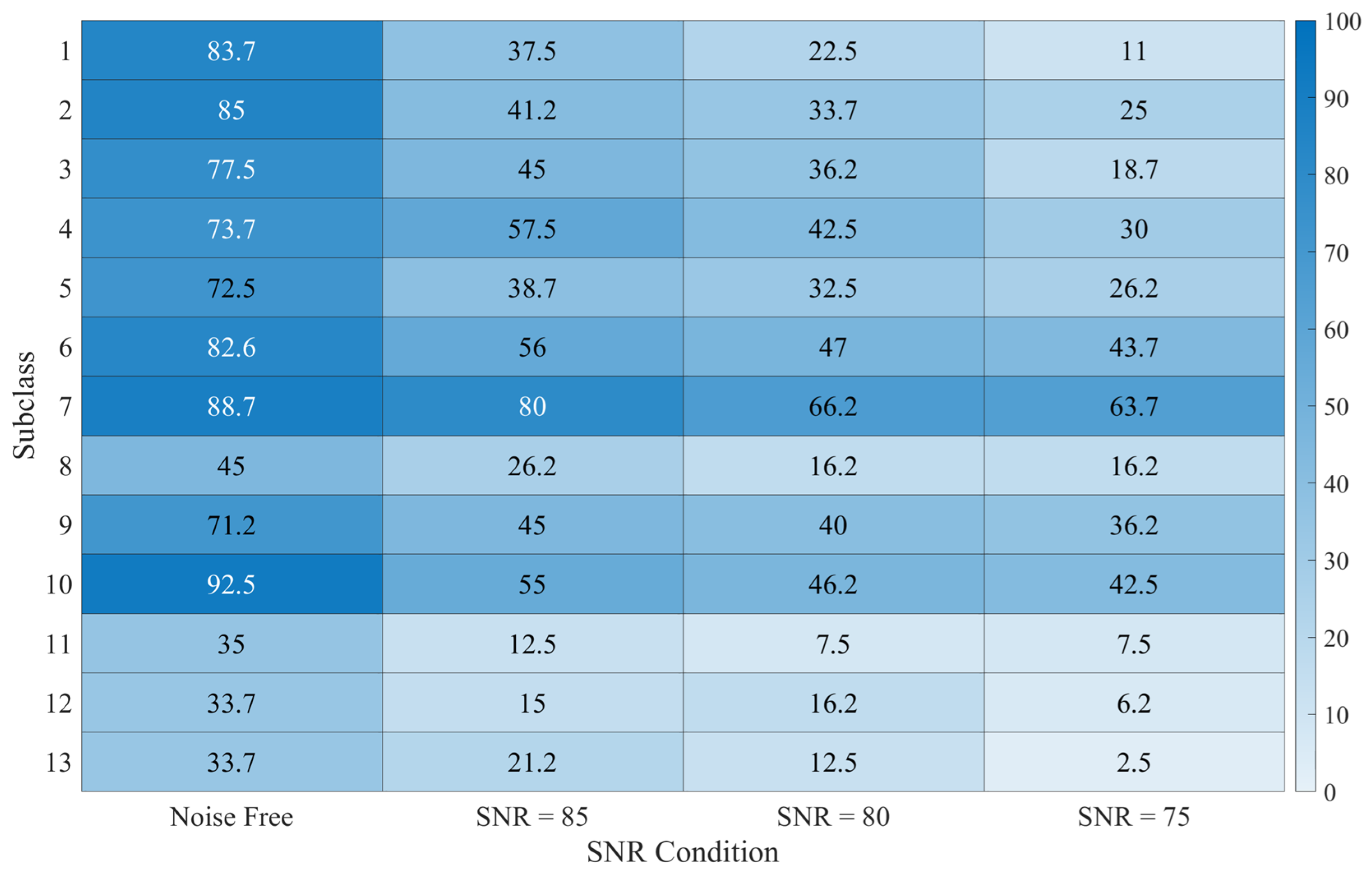
3.2. System Classification
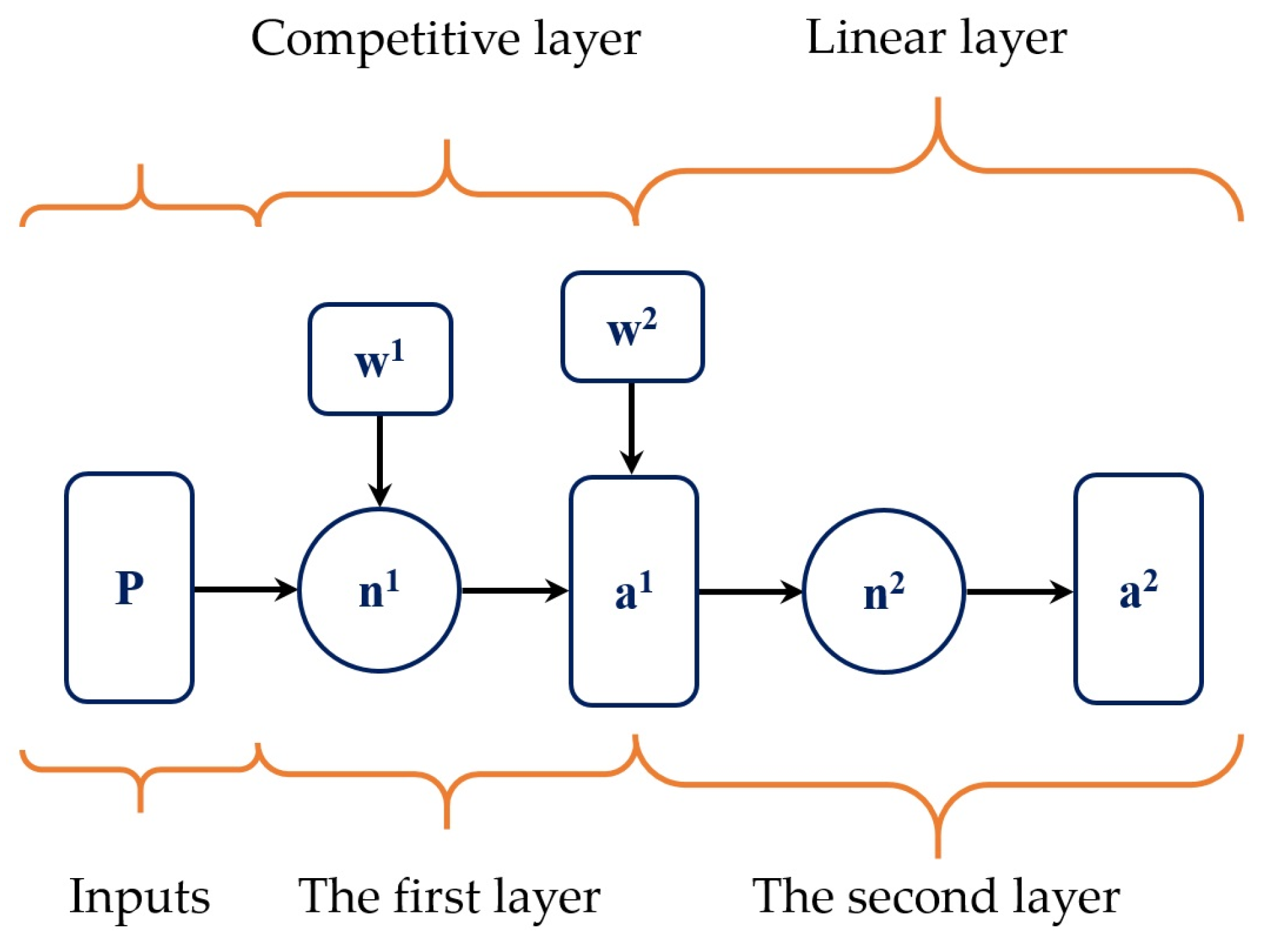
3.3. Defect Detection Using Artificial Neural Network
- Generalization: They adapt to new defect types not in their training data, enhancing their flexibility.
- Real-time detection: Neural networks can quickly process data, making them ideal for timely defect identification.
4. Result and Discussion
5. Conclusions
- Key findings and results: The finite element model adeptly encapsulated the two-dimensional in-plane dynamics of the gantry crane, focusing intricately on vertical and horizontal displacements. While acknowledging the relevance of out-of-plane dynamics, our concentration on the presented two-dimensional model was influenced by computational efficiency. The study illuminated valuable insights into the system’s behavior under diverse conditions, with a specific emphasis on the influence of varying stiffness matrices on structural response.
- Implications and applications: The findings hold substantial implications for structural health monitoring of gantry cranes. The established finite element model and defect detection mechanism lay a foundation for enhancing maintenance practices, thereby ensuring the longevity and safety of these vital industrial assets.
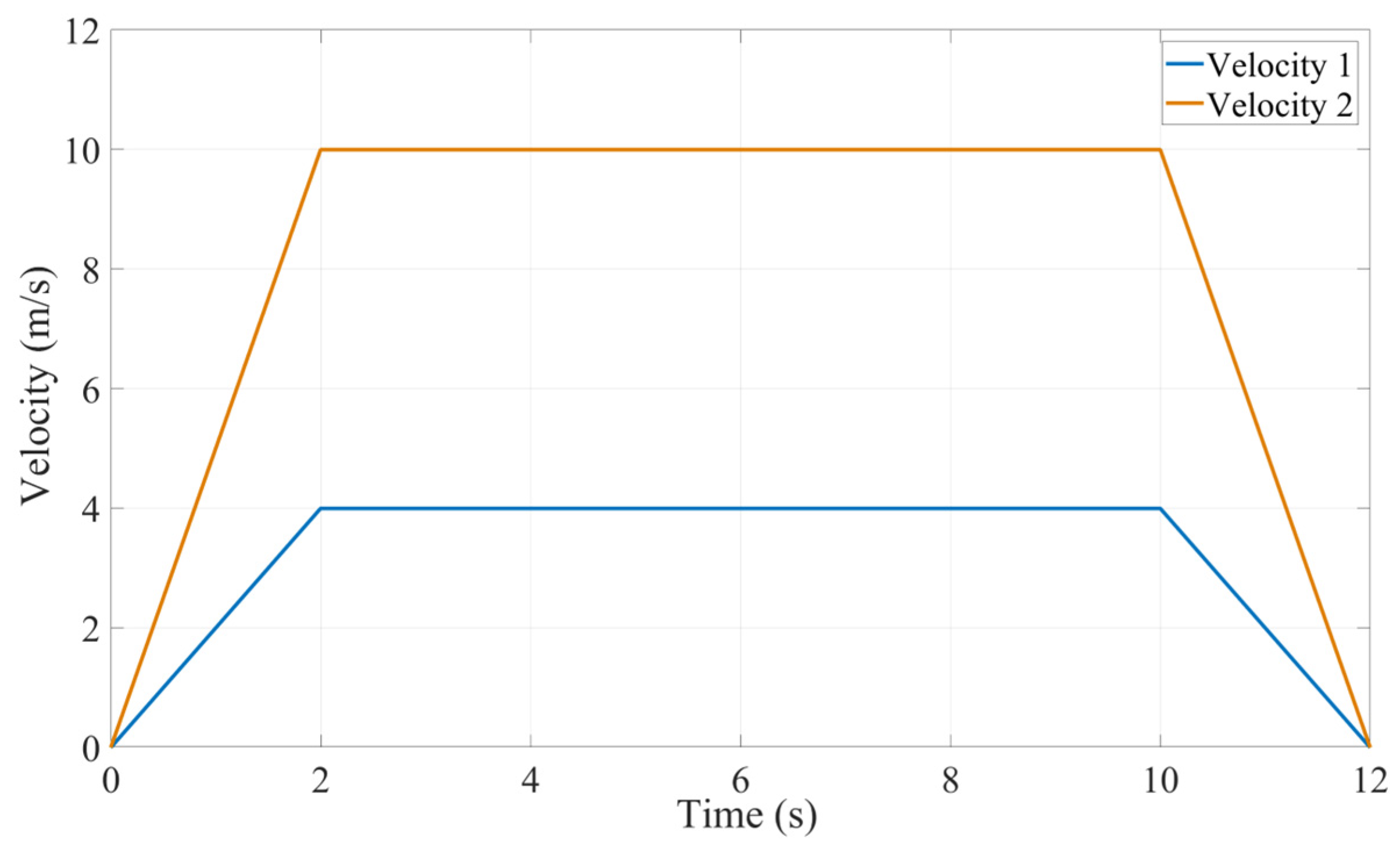
- Effects of moving mass velocity: The research rigorously considered all modeling and damage detection steps for two different speeds of the moving mass. A comparative analysis of the results obtained for two distinct velocity profiles enriched our understanding of dynamics and damage detection in gantry cranes.
- Limitations and future work: Acknowledging the study’s limitations, future research endeavors could focus on incorporating out-of-plane dynamics, thereby providing a more comprehensive analysis.
- Summary and closing thoughts: In summary, this research propels our comprehension of gantry crane dynamics and establishes a groundwork for effective defect detection. Through discussions on key findings, implications, and limitations, we aim to inspire future research that refines our understanding and contributes to the continuous improvement of gantry crane safety and efficiency.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

References
- Zrnić, N.D.; Gašić, V.M.; Bošnjak, S.M. Dynamic responses of a gantry crane system due to a moving body considered as moving oscillator. Arch. Civ. Mech. Eng. 2015, 15, 243–250. [Google Scholar] [CrossRef]
- Alhassan, A.B.; Muhammad, B.B.; Danapalasingam, K.A.; Sam, Y.M. Optimal analysis and control of 2D nonlinear gantry crane system. In Proceedings of the International Conference on Smart Sensors and Application (ICSSA), Kuala Lumpur, Malaysia, 26–27 July 2022; pp. 30–35. [Google Scholar]
- Xiao, F.; Zhu, W.; Meng, X.; Chen, G.S. Parameter Identification of Frame Structures by considering Shear Deformation. Int. J. Distrib. Sens. Netw. 2023, 2023, 6631716. [Google Scholar] [CrossRef]
- Meng, X.; Xiao, F.; Yan, Y.; Chen, G.S.; Ma, Y. Non-Destructive Damage Evaluation Based on Static Response for Beam-like Structures Considering Shear Deformation. Appl. Sci. 2023, 13, 8219. [Google Scholar] [CrossRef]
- Xiao, F.; Meng, X.; Zhu, W.; Chen, G.S.; Yan, Y. Combined Joint and Member Damage Identification of Semi-Rigid Frames with Slender Beams Considering Shear Deformation. Buildings 2023, 13, 1631. [Google Scholar] [CrossRef]
- Nie, X.P.; Li, X.G.; Fan, H.W.; Ding, K.Q.; Xu, L.B. The research of gantry crane girder damage problem by modal analysis method. Appl. Mech. Mater. 2014, 578–579, 872–876. [Google Scholar] [CrossRef]
- Pedrammehr, S.; Mahboubkhah, M.; Khani, N. Natural Frequencies and Mode Shapes for Vibrations of Machine Tools’ Hexapod Table. In Proceedings of the 1st International Conference on Acoustics & Vibration (ISAV2011), Tehran, Iran, 21–22 December 2011. [Google Scholar]
- Xu, X.; Zhang, X.; Zhu, W.; Gu, X. Modal parameter identification of a quayside container crane based on data-driven stochastic subspace identification. J. Vib. Eng. Technol. 2021, 9, 919–938. [Google Scholar] [CrossRef]
- Wang, H.F.; Noori, M.; Zhao, Y. A wavelet-based damage identification for large crane structures. In Proceedings of the 2014 6th World Conference on Structural Control and Monitoring, Barcelona, Spain, 15–17 July 2014. [Google Scholar]
- Goubej, M.; Helma, V. Vibration damping in gantry crane systems: Finite horizon optimal control approach. In Proceedings of the 2019 24th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Zaragoza, Spain, 10–13 September 2019; pp. 877–882. [Google Scholar]
- Zhao, Y.; Wu, X.; Li, F.; Zhang, Y. Positioning and Swing Elimination Control of the Overhead Crane System with Double-Pendulum Dynamics. J. Vib. Eng. Technol. 2024, 12, 971–978. [Google Scholar] [CrossRef]
- Golovin, I.; Palis, S. Robust control for active damping of elastic gantry crane vibrations. Mech. Syst. Signal Process. 2019, 121, 264–278. [Google Scholar] [CrossRef]
- Rigatos, G. Nonlinear Optimal Control for the Underactuated Double-Pendulum Overhead Crane. J. Vib. Eng. Technol. 2023. [Google Scholar] [CrossRef]
- Entessari, F.; Najafi Ardekany, A.; Alasty, A. Exponential stabilization of flexural sway vibration of gantry crane via boundary control method. J. Vib. Control 2020, 26, 36–55. [Google Scholar] [CrossRef]
- Mori, Y.; Tagawa, Y. Vibration controller for overhead cranes considering limited horizontal acceleration. Control Eng. Pract. 2018, 81, 256–263. [Google Scholar] [CrossRef]
- Avci, O.; Abdeljaber, O.; Kiranyaz, S.; Hussein, M.; Gabbouj, M.; Inman, D.J. A review of vibration-based damage detection in civil structures: From traditional methods to Machine Learning and Deep Learning applications. Mech. Syst. Signal Process. 2021, 147, 107077. [Google Scholar] [CrossRef]
- Ku, N.; Ha, S. Dynamic response analysis of heavy load lifting operation in shipyard using multi-cranes. Ocean Eng. 2014, 83, 63–75. [Google Scholar] [CrossRef]
- Xu, B.; Wu, Q. Stress fatigue crack propagation analysis of crane structure based on acoustic emission. Eng. Fail. Anal. 2020, 109, 104206. [Google Scholar] [CrossRef]
- Wang, X.; Wang, X.; Hu, X.-L. Damage assessment in structural steel subjected to tensile load using nonlinear and linear ultrasonic techniques. Appl. Acoust. 2019, 144, 40–50. [Google Scholar] [CrossRef]
- Rivera, F.G.; Edwards, G.; Eren, E. Acoustic emission technique to monitor crack growth in a mooring chain. Appl. Acoust. 2018, 139, 156–164. [Google Scholar] [CrossRef]
- Luczaka, M.M.; Telega, J.; Zagatob, N. On the damage detection of a laboratory scale model of a tripod supporting structure by vibration-based methods. Mar. Struct. 2019, 64, 146–160. [Google Scholar] [CrossRef]
- Ferjaoui, A.; Abdel Wahab, M.; Hojjati-Talemi, R. Prediction of fretting fatigue crack initiation in double lap bolted joint using continuum damage mechanics. Int. J. Fatigue 2015, 73, 66–76. [Google Scholar] [CrossRef]
- Yoon, M.K.; Heider, D.; Gillespie, J.W., Jr.; Ratcliffe, C.P.; Crane, R.M. Local damage detection with the global fitting method using operating deflection shape data. J. Nondestruct. Eval. 2010, 29, 25–37. [Google Scholar] [CrossRef]
- Assaad, B.; Eltabach, M.; Antoni, J. Vibration based condition monitoring of a multistage epicyclic gearbox in lifting cranes. Mech. Syst. Signal Process. 2014, 42, 351–367. [Google Scholar] [CrossRef]
- Fang, X.; Luo, H.; Tang, J. Structural damage detection using neural network with learning rate improvement. Comput. Struct. 2005, 83, 2150–2161. [Google Scholar] [CrossRef]
- Zang, C.; Grafe, H.; Imergun, M. Frequency-domain criteria for correlating and updating dynamic finite element models. Mech. Syst. Signal Process. 2001, 15, 139–155. [Google Scholar] [CrossRef]
- Pedrammehr, S. Investigation of Factors Influential on the Dynamic Features of Machine Tools’ Hexapod Table. In Proceedings of the 2nd International Conference on Acoustics and Vibration (ISAV 2012), Tehran, Iran, 26–27 December 2012. [Google Scholar]
- Xiao, F.; Sun, H.; Mao, Y.; Chen, G.S. Damage identification of large-scale space truss structures based on stiffness separation method. Structures 2023, 53, 109–118. [Google Scholar] [CrossRef]
- Tran-Ngoc, H.; Khatir, S.; De Roeck, G.; Bui-Tien, T.; Abdel Wahab, M. An efficient artificial neural network for damage detection in bridges and beam-like structures by improving training parameters using cuckoo search algorithm. Eng. Struct. 2019, 199, 109637. [Google Scholar] [CrossRef]
- Kao, C.Y.; Hung, S.L. Detection of structural damage via free vibration responses generated by approximating artificial neural networks. Comput. Struct. 2003, 81, 2631–2644. [Google Scholar] [CrossRef]
- Zou, Y.; Tong, L.; Steven, G.P. Vibration-based model dependent damage (delamination) identification and health monitoring for composite structures: A review. J. Sound Vib. 2000, 230, 357–378. [Google Scholar] [CrossRef]
- Gajjal, P.; Lathkar, G.S. Fault diagnosis in an optimized rolling bearing using an intelligent approach. Arch. Appl. Mech. 2022, 92, 1585–1601. [Google Scholar] [CrossRef]
- de Lautour, O.; Omenzetter, P. Damage classification and estimation in experimental structures using time series analysis and pattern recognition. J. Mech. Syst. Signal Process. 2010, 24, 1556–1569. [Google Scholar] [CrossRef]
- Li, X.; Xi, H.; Zhou, C.; Gu, W.; Gao, T. Damage Degree Identification of Crane Girder Based on the Support Vector Machine. In Proceedings of the 2018 Prognostics and System Health Management Conference (PHM-Chongqing), Chongqing, China, 26–28 October 2018. [Google Scholar] [CrossRef]
- Li, B.W.; Huang, K.; Xu, F.Y.; Jiang, Y.; Yang, H.C. Research on Crane Damage Identification Based on GNAR Model without Baseline. In Proceedings of the DMCIT’17: 2017 International Conference on Data Mining, Communications and Information Technology, Phuket, Thailand, 25–27 May 2017; ACM: New York, NY, USA, 2017. ISBN 978-1-4503-5218-5/17/05. [Google Scholar]
- de Assis, F.M.; Gomes, G.F. Crack identification in laminated composites based on modal responses using metaheuristics, artificial neural networks, and response surface method: A comparative study. Arch. Appl. Mech. 2021, 91, 4389–4408. [Google Scholar] [CrossRef]
- Nguyen, D.H.; Nguyen, Q.B.; Bui-Tien, T.; De Roeck, G.; Wahab, M.A. Damage detection in girder bridges using modal curvatures gapped smoothing method and Convolutional Neural Network: Application to Bo Nghi bridge. Theor. Appl. Fract. Mech. 2020, 109, 102728. [Google Scholar] [CrossRef]
- Tsou, P.; Shen, M.-H.H. Structural damage detection and identification using neural network. AIAA J. 1994, 32, 176–183. [Google Scholar] [CrossRef]
- Jamalkia, A.; Ettefagh, M.M.; Mojtahedi, A. Damage detection of TLP and Spar floating wind turbine using dynamic response of the structure. Ocean Eng. 2016, 125, 191–202. [Google Scholar] [CrossRef]
- Zhao, H.; Ding, Y.; Li, A.; Chen, B.; Zhang, X. State-Monitoring for Abnormal Vibration of Bridge Cables Focusing on Non-Stationary Responses: From Knowledge in Phenomena to Digital Indicators. Measurement 2022, 205, 112148. [Google Scholar] [CrossRef]
- Zhao, H.; Ding, Y.; Li, A.; Ren, Z.; Yang, K. Live-Load Strain Evaluation of the Prestressed Concrete Box-Girder Bridge Using Deep Learning and Clustering. Struct. Health Monit. 2020, 19, 1051–1063. [Google Scholar] [CrossRef]
- Cao, K.; Liu, M.; Su, H.; Wu, J.; Zhu, J.; Liu, S. Analyzing the Noise Robustness of Deep Neural Networks. IEEE Trans. Vis. Comput. Graph. 2021, 27, 3289–3304. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Ding, Y.; Zhao, H.; Yi, L.; Guo, T.; Li, A.; Zou, Y. Mixed Skewness Probability Modeling and Extreme Value Predicting for Physical System Input–Output Based on Full Bayesian Generalized Maximum-Likelihood Estimation. IEEE Trans. Instrum. Meas. 2024, 73, 1–16. [Google Scholar] [CrossRef]
- Zhao, H.; Ding, Y.; Meng, L.; Qin, Z.; Yang, F.; Li, A. Bayesian Multiple Linear Regression and New Modeling Paradigm for Structural Deflection Robust to Data Time Lag and Abnormal Signal. IEEE Sens. J. 2023, 23, 19635–19647. [Google Scholar] [CrossRef]
- Zhao, H.-W.; Ding, Y.-L.; Nagarajaiah, S.; Li, A.-Q. Behavior Analysis and Early Warning of Girder Deflections of a Steel-Truss Arch Railway Bridge under the Effects of Temperature and Trains: Case Study. J. Bridge Eng. 2019, 24, 05018013. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Top beam length: | L = 40 (m) |
| Top beam cross section area: | AL = 0.09 (m2) |
| Top beam moment of inertia | IL = 0.014 (m4) |
| Sheer leg height: | h = 15 (m) |
| Sheer leg cross section area: | AS = 0.048 (m2) |
| Sheer leg moment of inertia | IS = 0.01 (m4) |
| Pier leg height: | H = 15 (m) |
| Pier leg cross section area: | AP = 0.07 (m2) |
| Pier leg moment of inertia: | IP = 0.024 (m4) |
| Stiffens coefficient for moving mass spring: | k = 109 (N/m) |
| Damping coefficient: | = 0.5% |
| Density of structure: | = 7850 (kg/m3) |
| Modulus of elasticity: | E = 2.1 × 1011 (Pa) |
| Subclass | Class | Fault Type | Changes in Stiffness Matrix | |
|---|---|---|---|---|
| 1 | Fault-free class | Fault free | (0–2)% | |
| 2 | 1 | The first class of defects in element 11 of the pier leg. | Low fault | (3–12)% |
| 3 | Medium fault | (13–22)% | ||
| 4 | Severely faulty | (23–32)% | ||
| 5 | 2 | The second class of defects in elements 1 and 2 of the top beam. | Low fault | (3–12)% |
| 6 | Medium fault | (13–22)% | ||
| 7 | Severely faulty | (23–32)% | ||
| 8 | 3 | The third class of faults in element 22 of sheer leg. | Low fault | (3–12)% |
| 9 | Medium fault | (13–22)% | ||
| 10 | Severely faulty | (23–32)% | ||
| 11 | 4 | The fourth class of defects in the spring connected to the moving mass. | Low fault | (3–12)% |
| 12 | Medium fault | (13–22)% | ||
| 13 | Severely faulty | (23–32)% | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Safaei, M.; Hejazian, M.; Pedrammehr, S.; Pakzad, S.; Ettefagh, M.M.; Fotouhi, M. Damage Detection of Gantry Crane with a Moving Mass Using Artificial Neural Network. Buildings 2024, 14, 458. https://doi.org/10.3390/buildings14020458
Safaei M, Hejazian M, Pedrammehr S, Pakzad S, Ettefagh MM, Fotouhi M. Damage Detection of Gantry Crane with a Moving Mass Using Artificial Neural Network. Buildings. 2024; 14(2):458. https://doi.org/10.3390/buildings14020458
Chicago/Turabian StyleSafaei, Mohammad, Mahsa Hejazian, Siamak Pedrammehr, Sajjad Pakzad, Mir Mohammad Ettefagh, and Mohammad Fotouhi. 2024. "Damage Detection of Gantry Crane with a Moving Mass Using Artificial Neural Network" Buildings 14, no. 2: 458. https://doi.org/10.3390/buildings14020458