
Study on the Seismic Response Characteristics of Shield Tunnels with Different General Segment Assembly Methods and Widths


Abstract
:1. Introduction
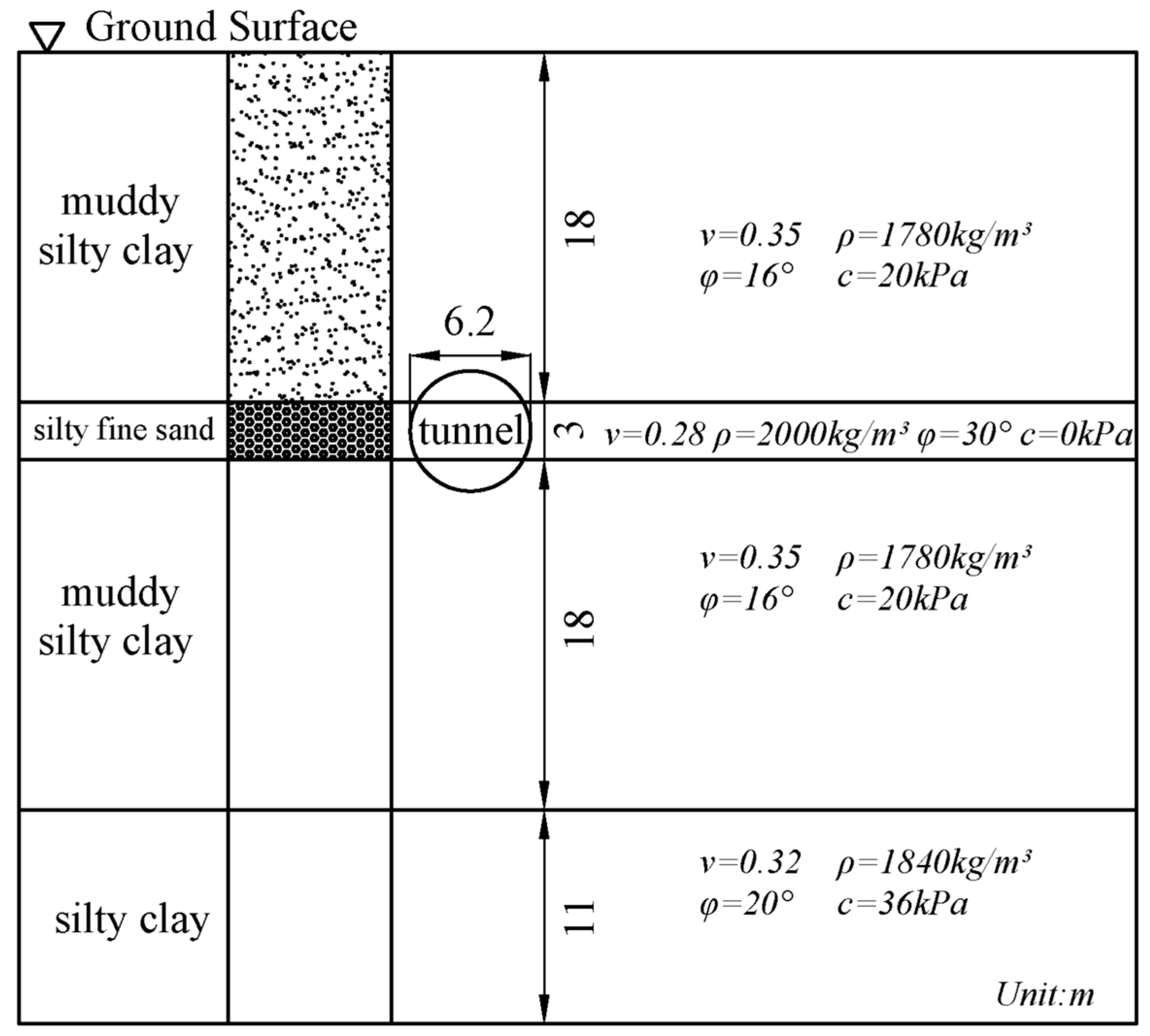
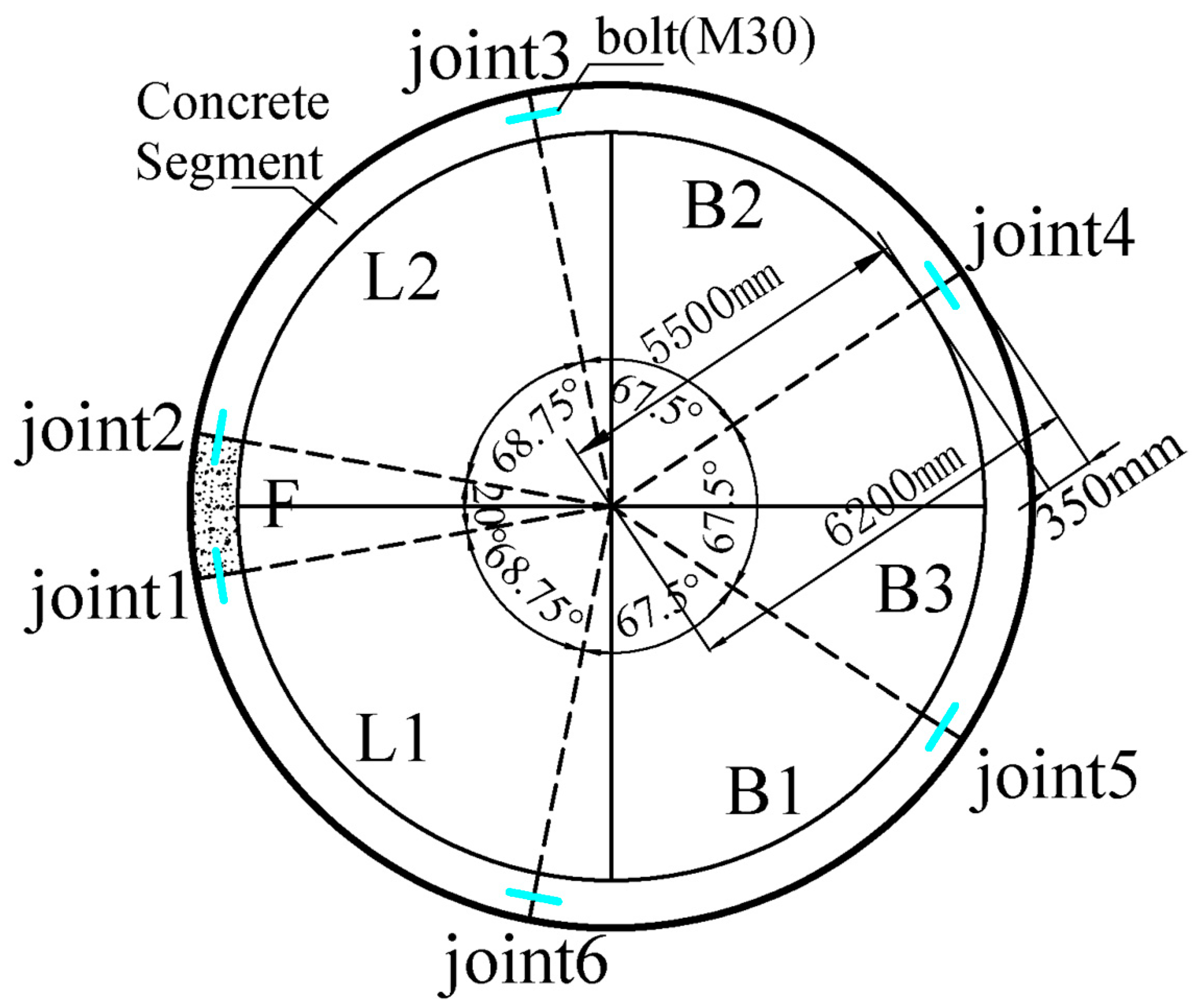
2. Engineering Research Background
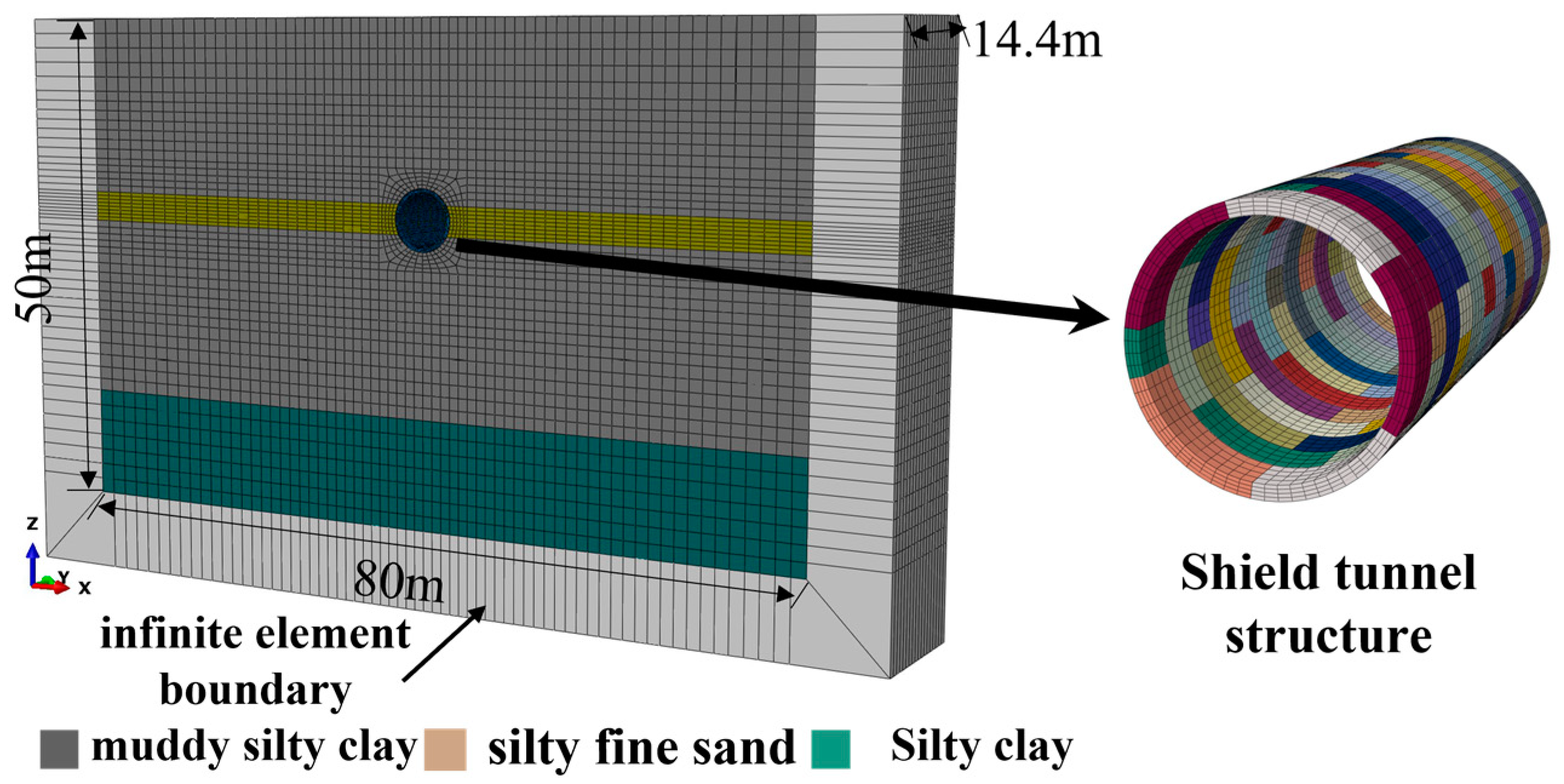
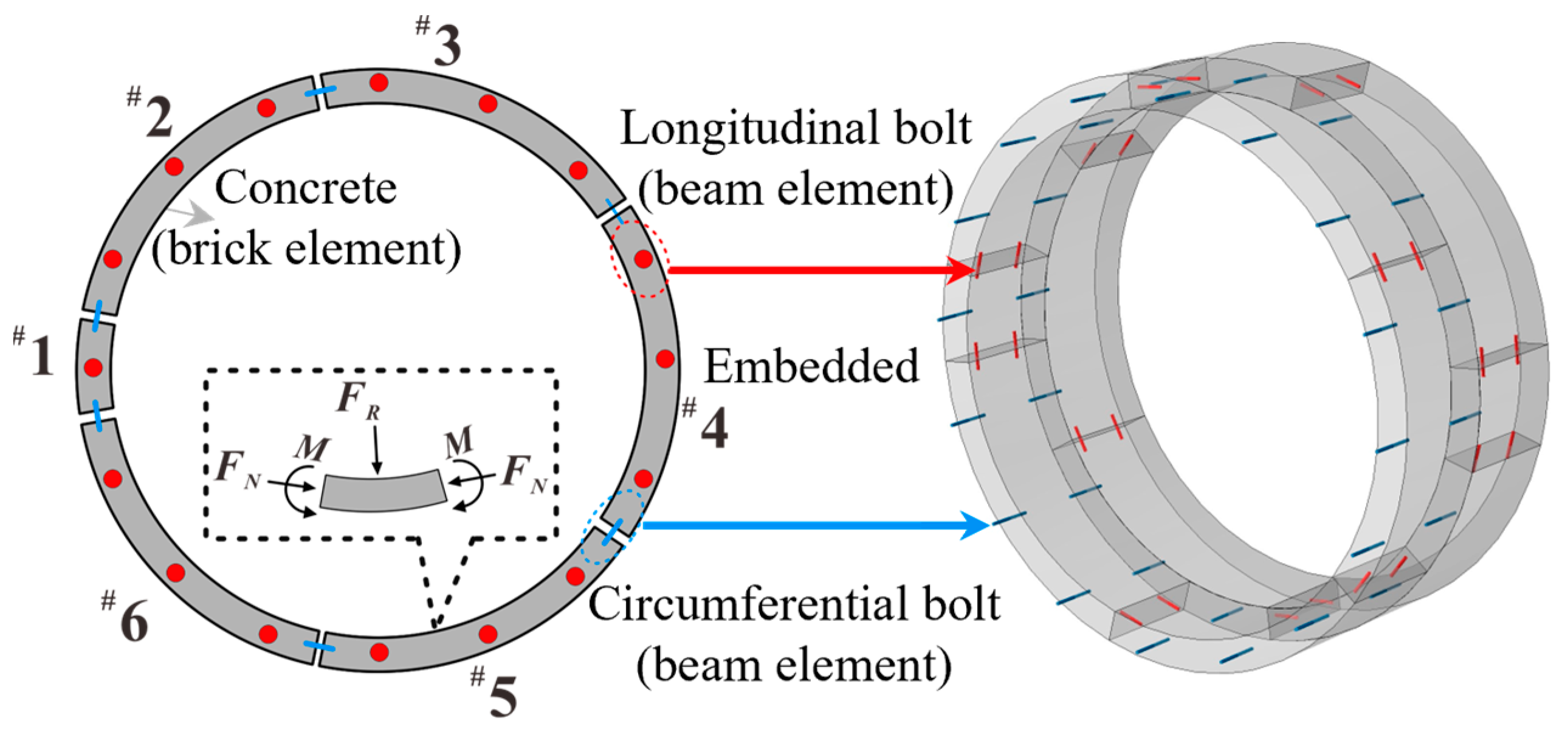
3. Numerical Model of Soil–Shield Tunnel Interaction
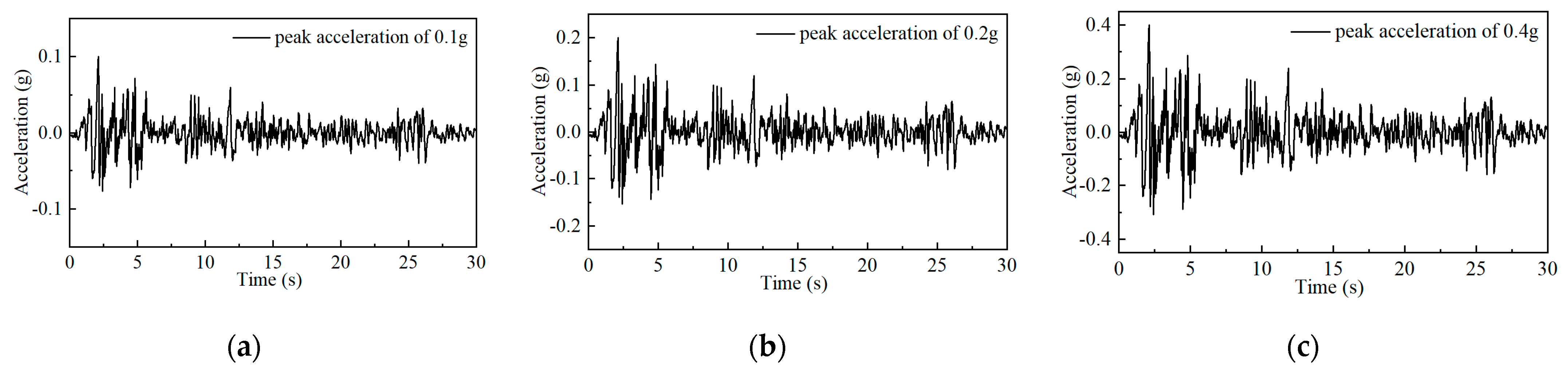
4. Surrounding Rock–Tunnel Interaction, Boundary Conditions, and Input Motions
5. Dynamic Response Characteristics of Shield Tunnel under Different Assembly Methods
5.1. FEM of Shield Tunnel under Different Assembly Methods
5.2. Numerical Investigations and Discussions
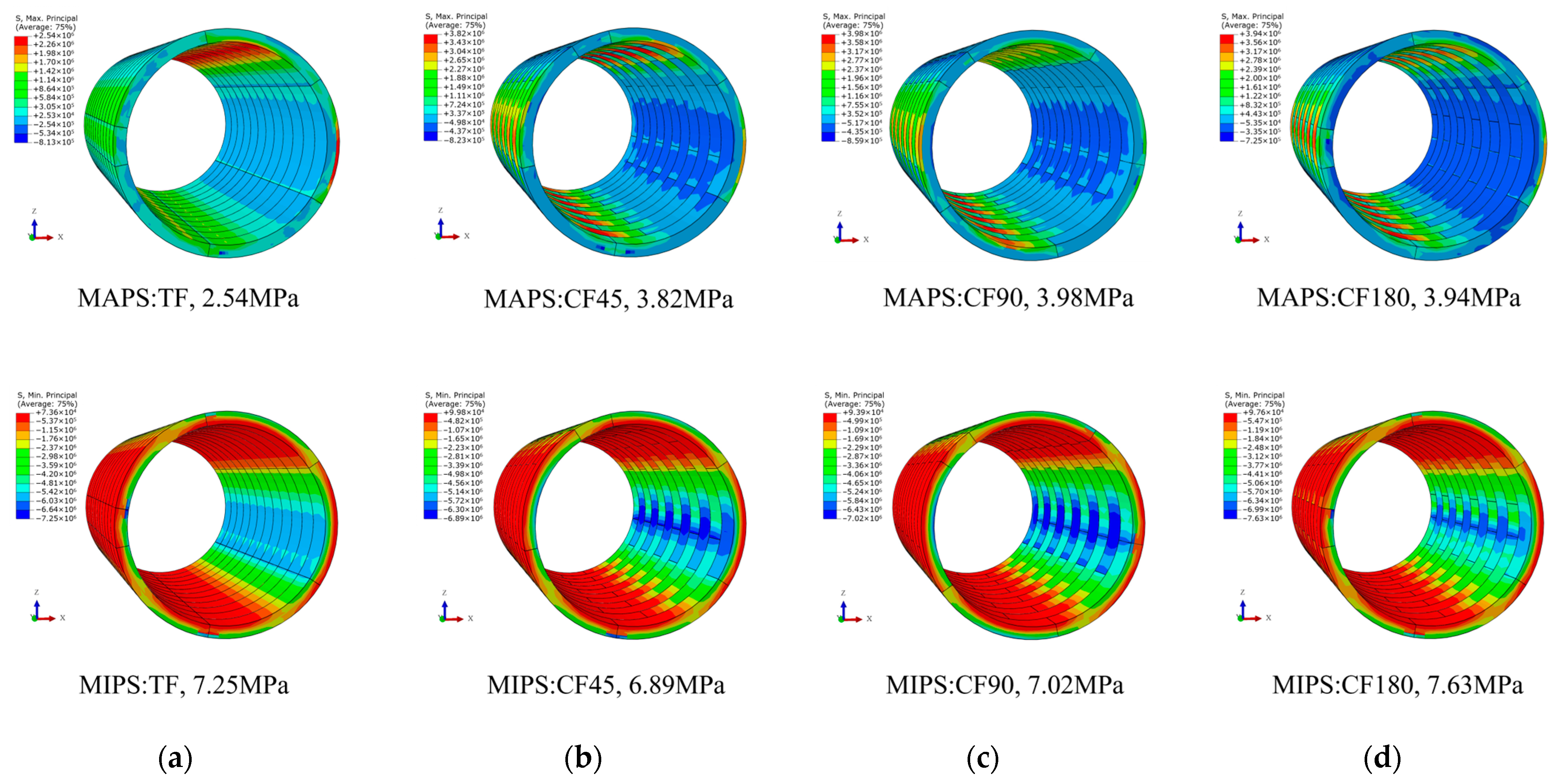
5.2.1. Deformation of Shield Tunnel Structure with Different Assembly Methods due to Seismic Loads
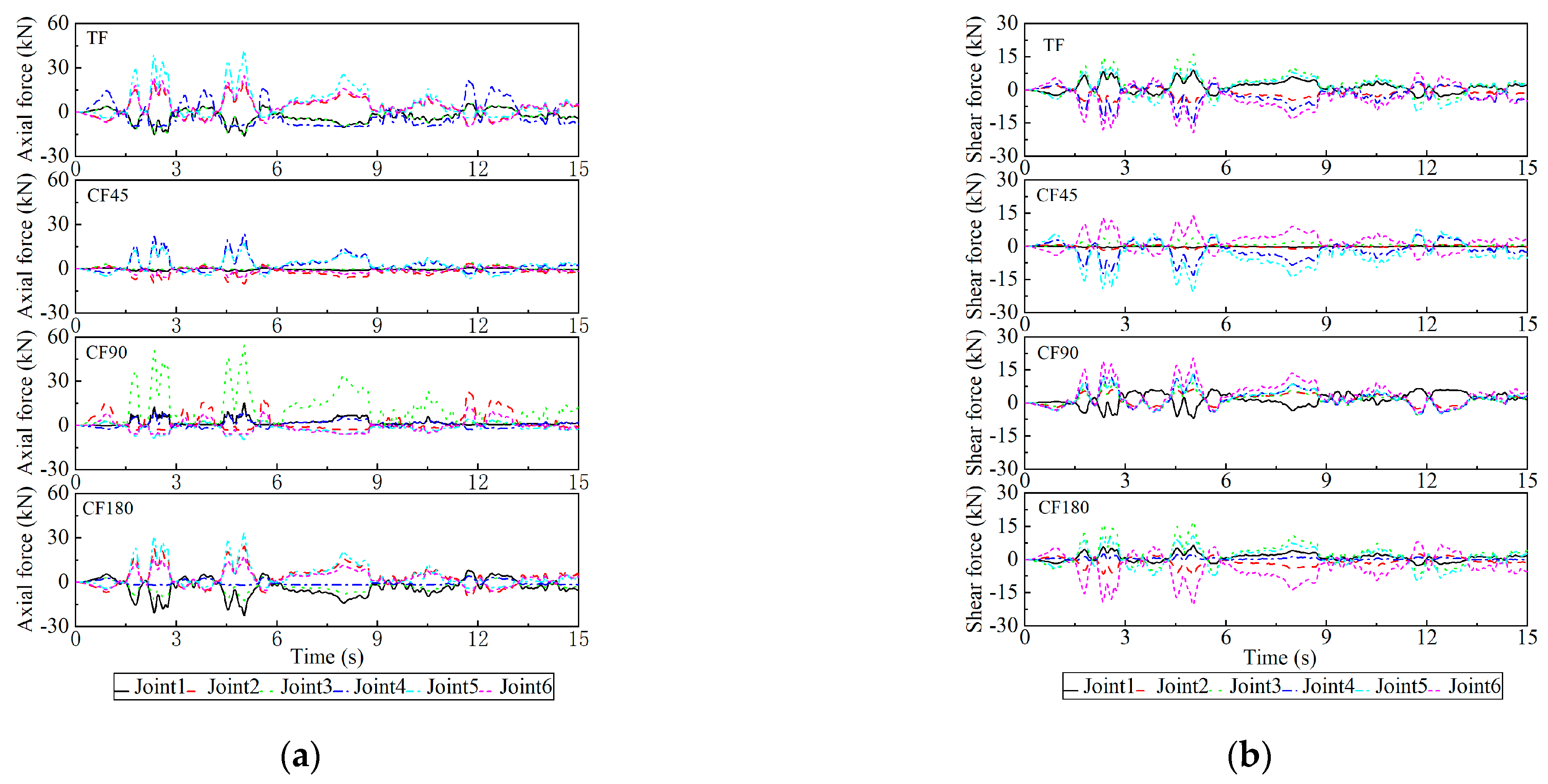
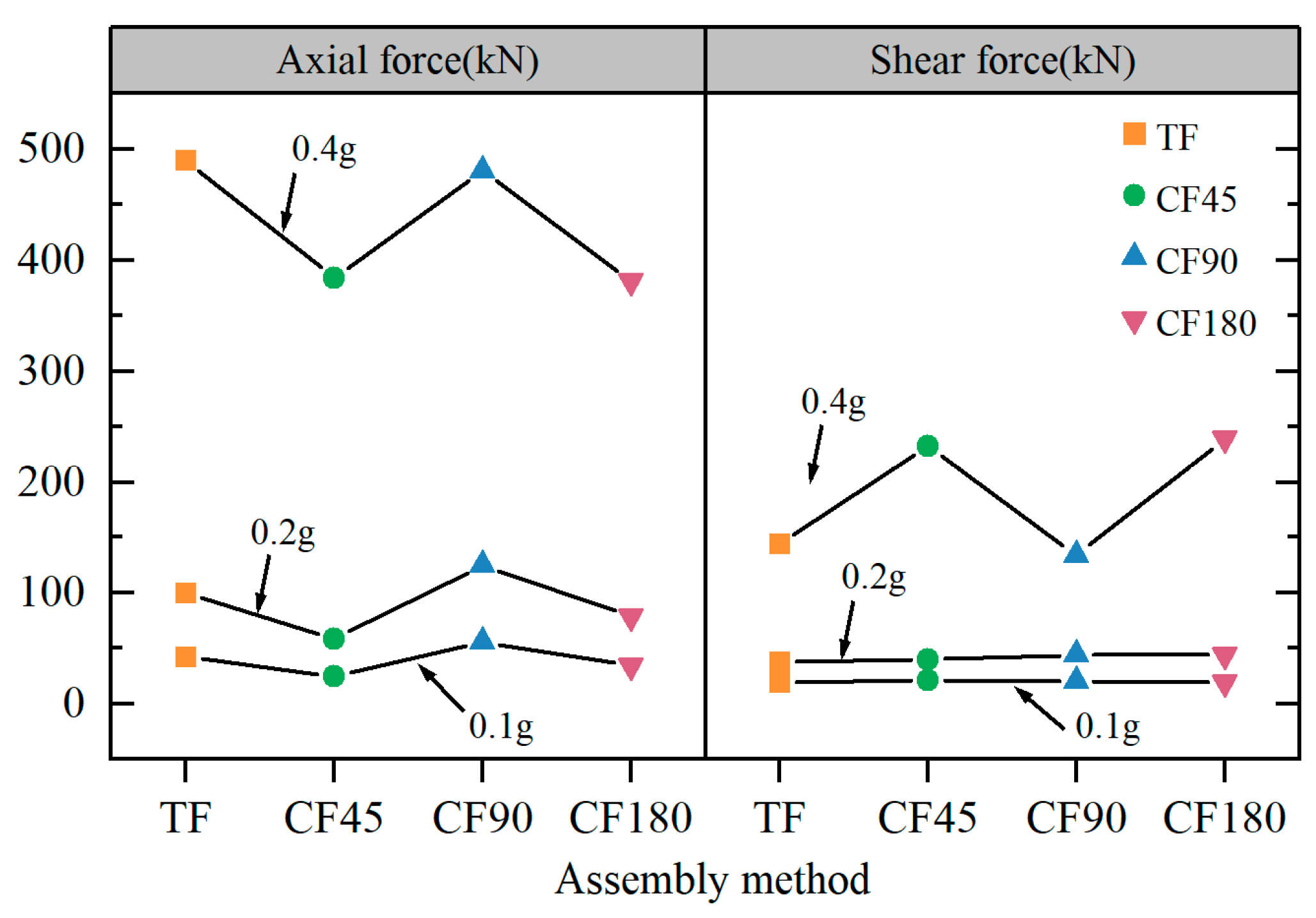
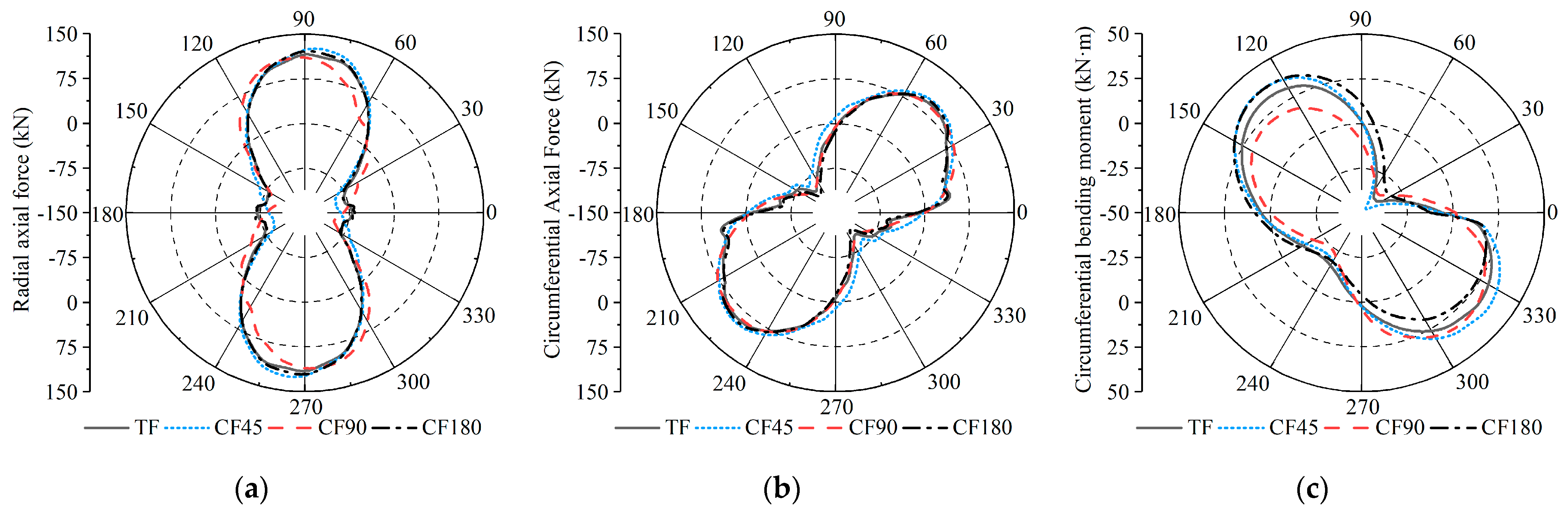
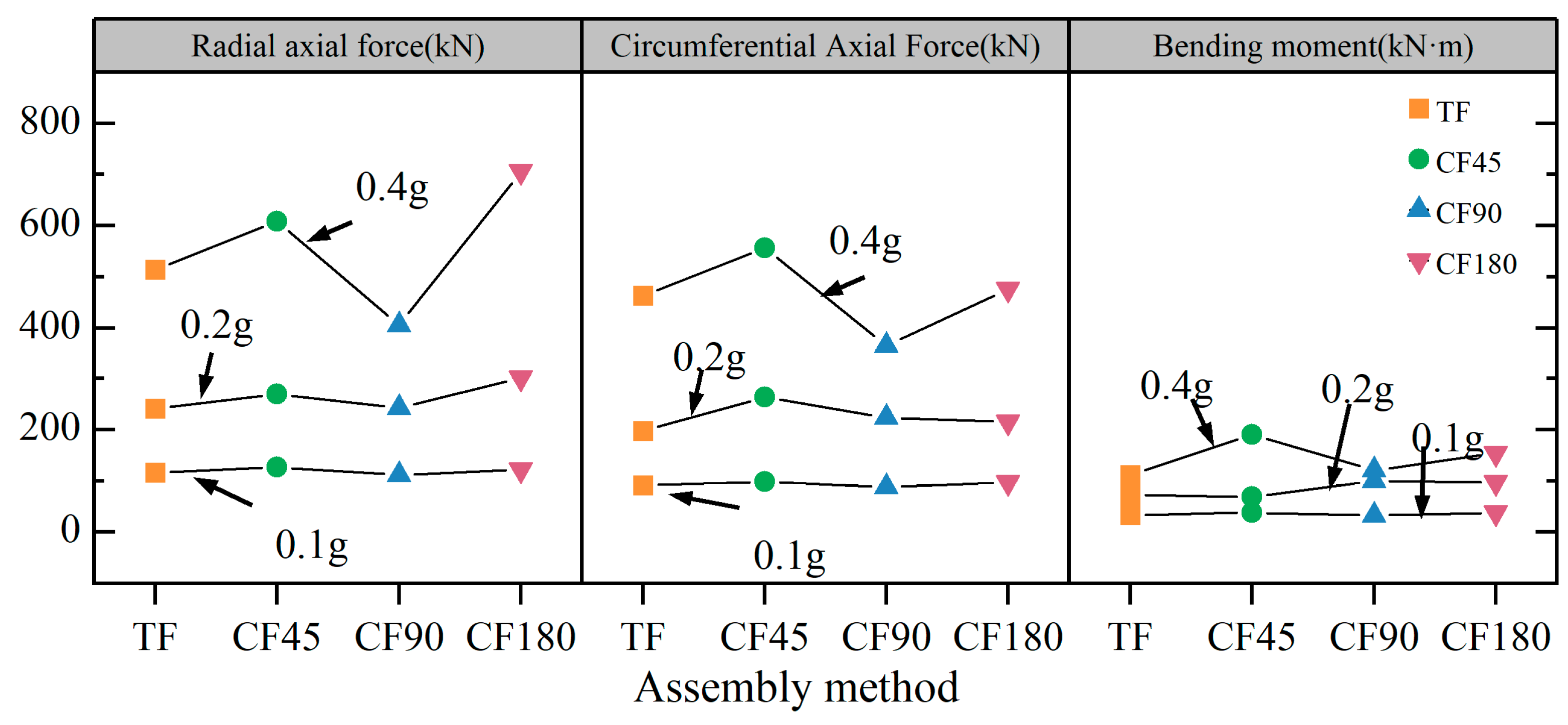
5.2.2. Mechanical Behavior of Shield Tunnel Joints under Different Assembly Methods
5.2.3. Evaluation and Discussion of Seismic Performance
6. Dynamic Response Characteristics of Shield Tunnel under Different Segment Widths
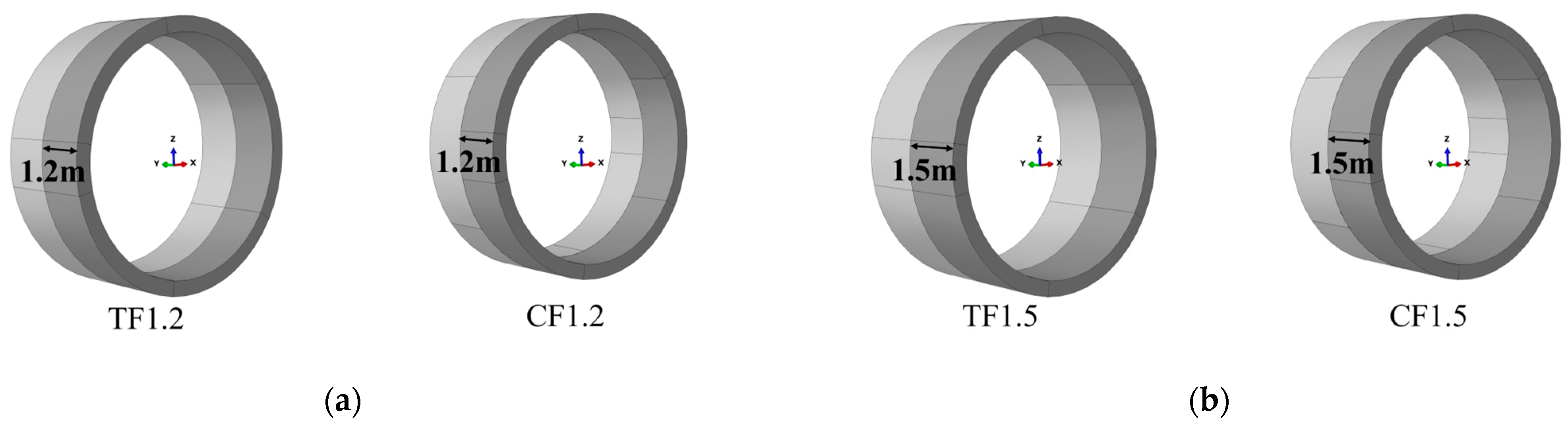
6.1. FEM of Shield Tunnel under Different Segment Widths
6.2. Numerical Investigations and Discussions
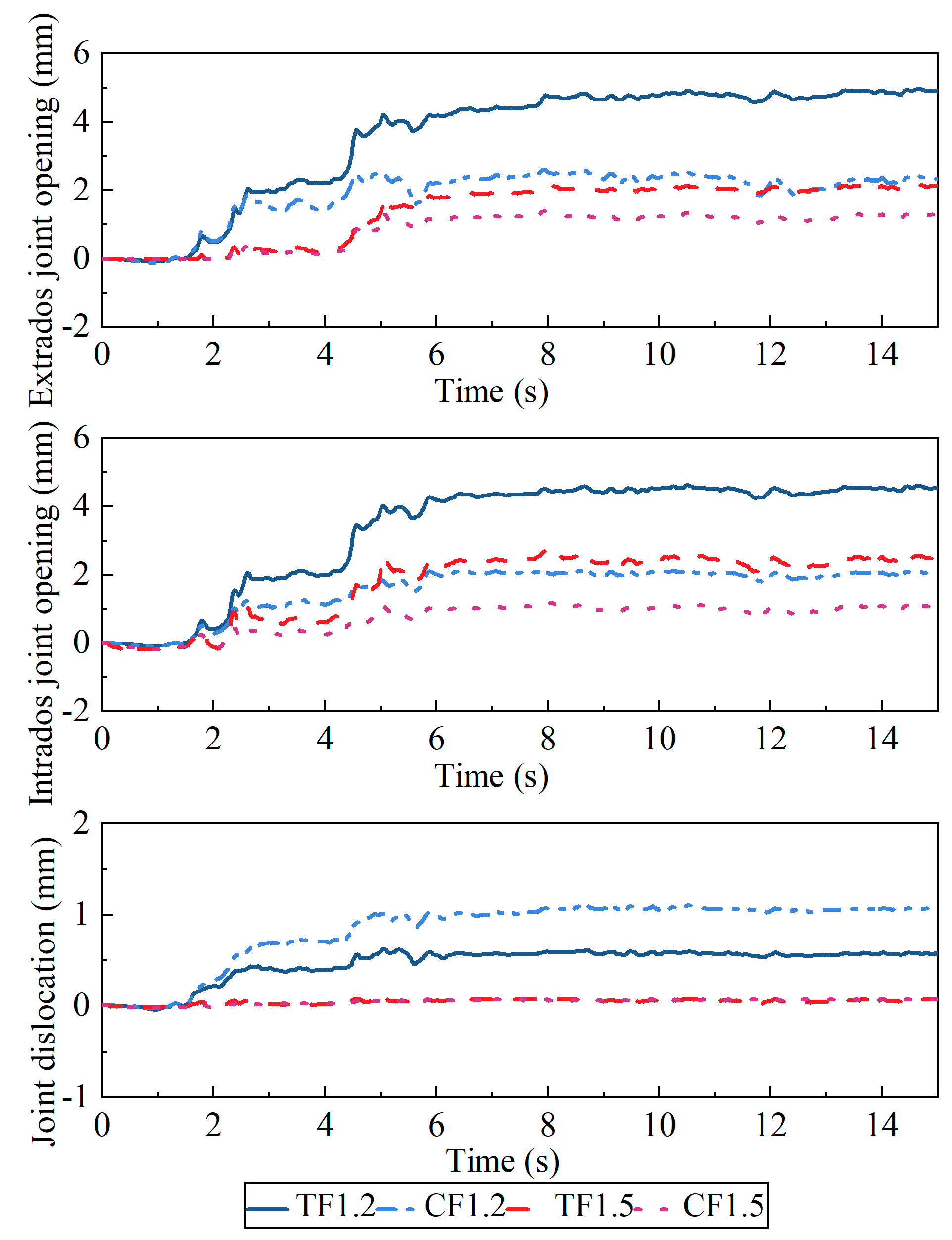
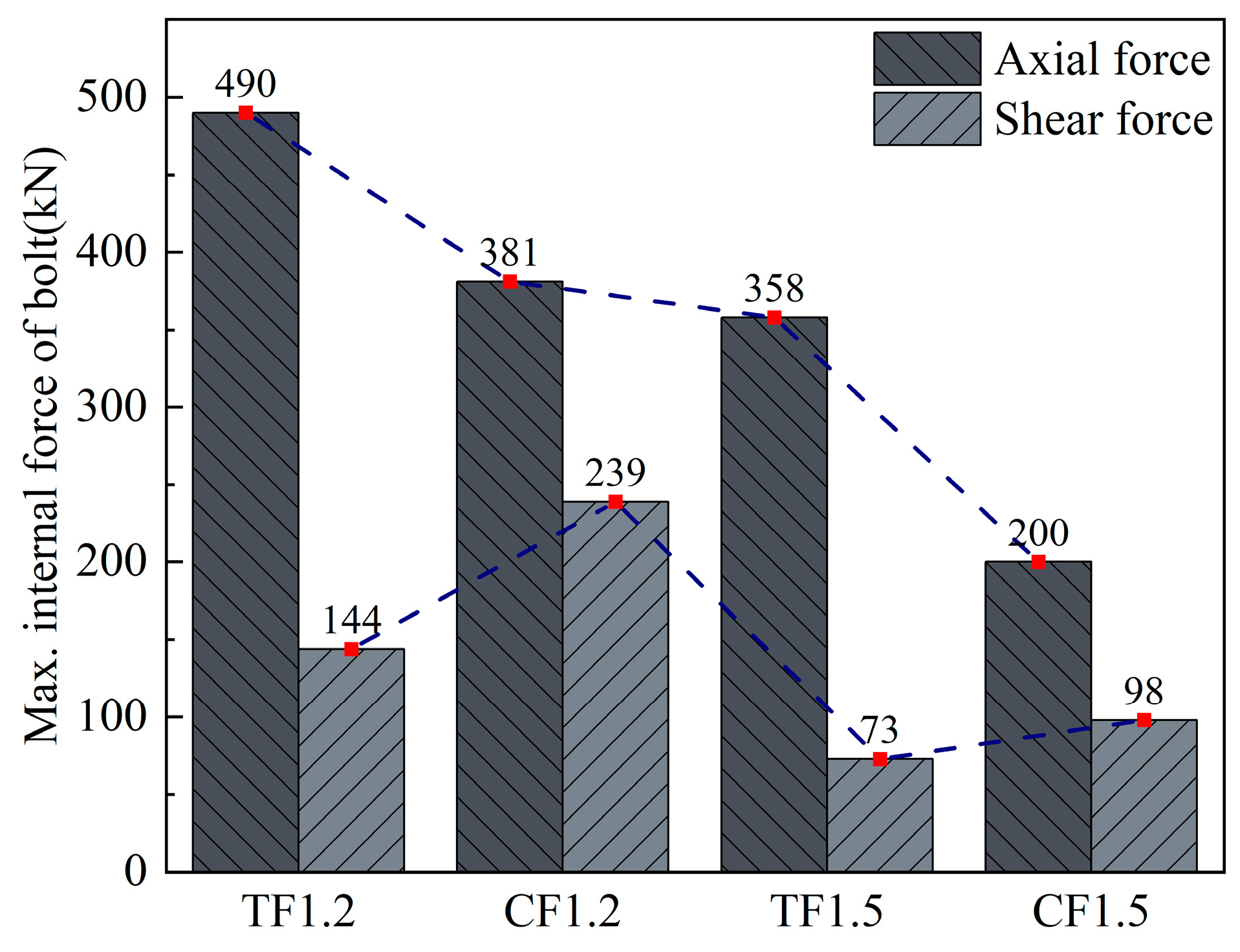
6.2.1. Mechanical Behavior of the Shield Tunnel Joints under Different Segment Widths
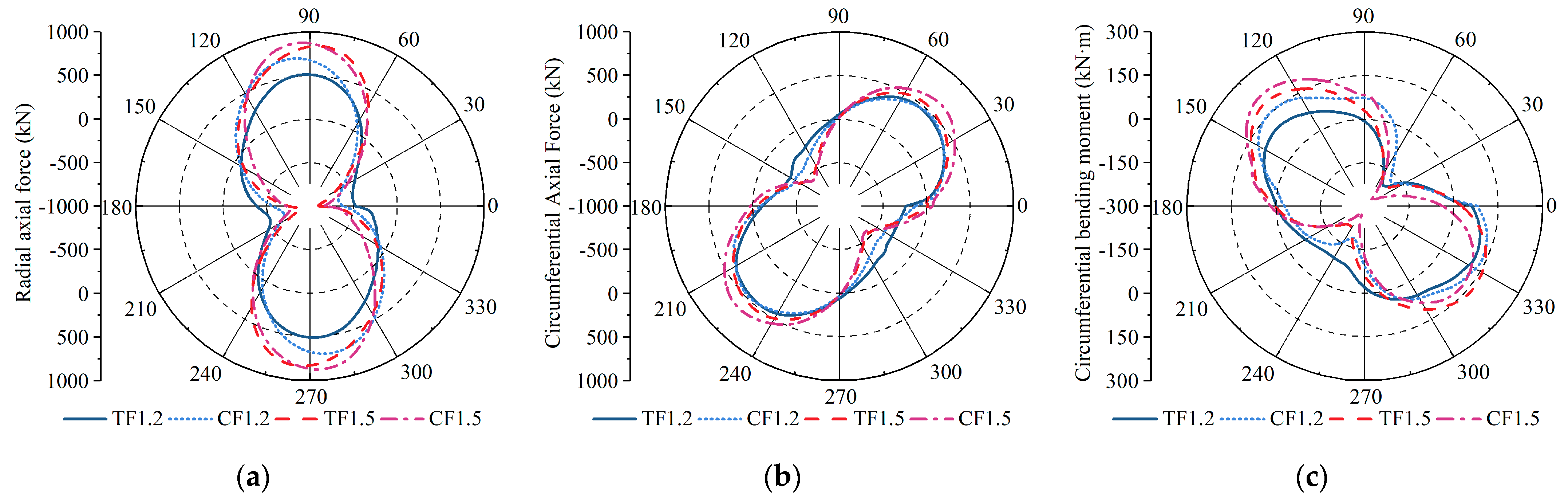
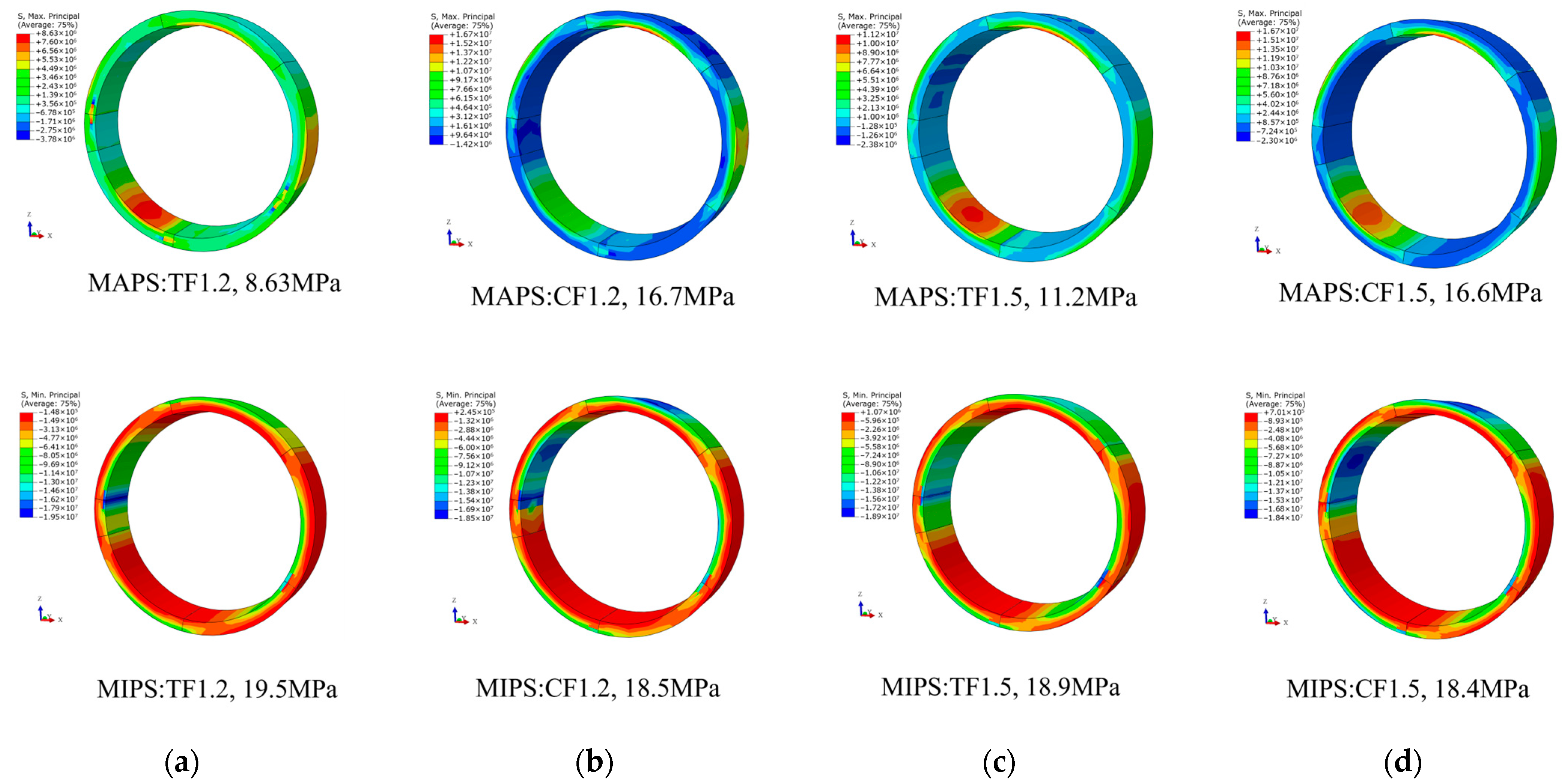
6.2.2. Mechanical Behavior of Segments under Different Segment Widths
6.2.3. Analysis and Discussion of Seismic Performance
7. Conclusions
- (1)
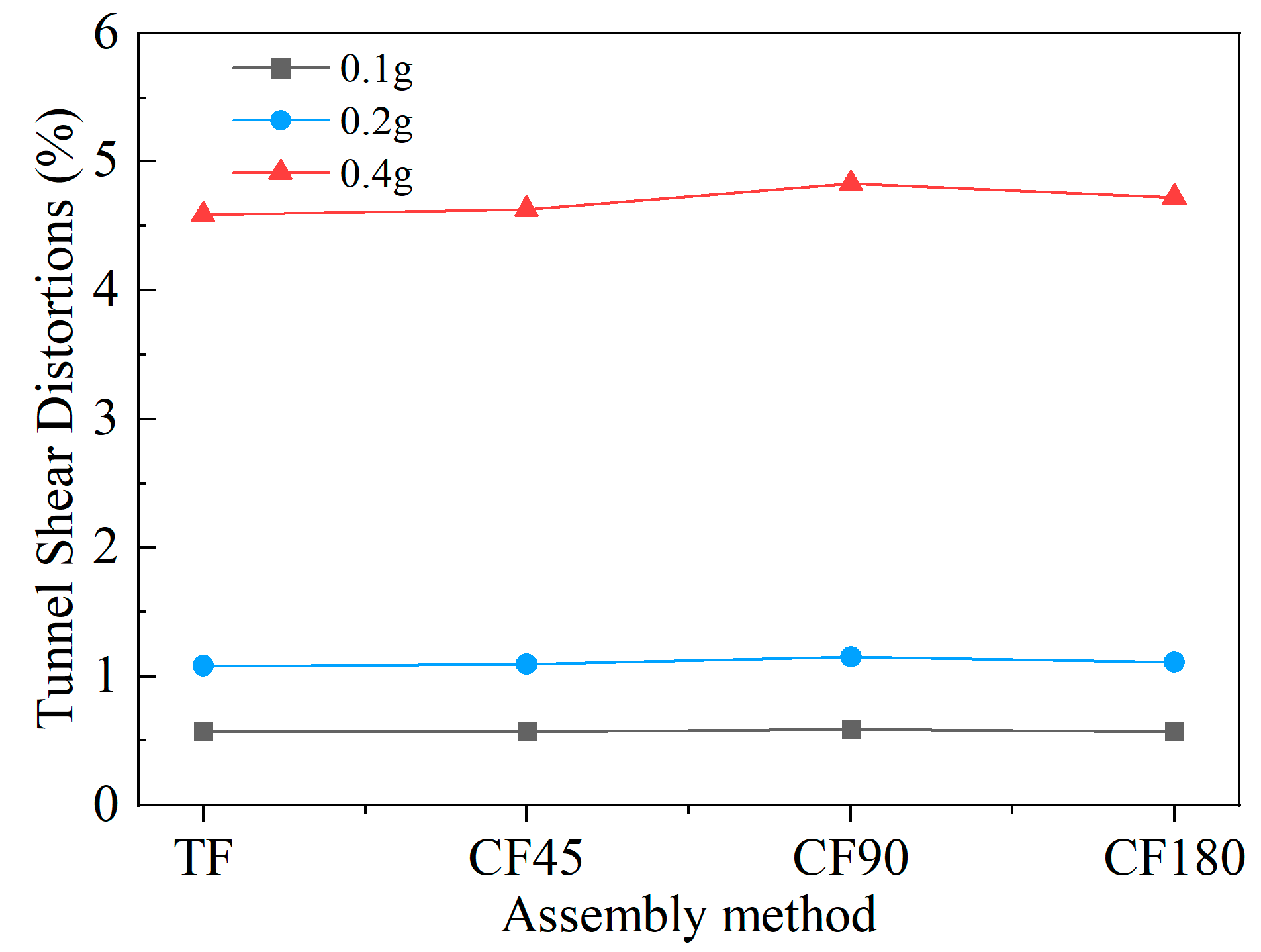
- Under the action of 0.1 g, 0.2 g, and 0.4 g earthquakes, the shear deformation of the lining structure with different assembly methods is relatively close, and the difference is only 5.24% under the action of 0.4 g earthquake loading. The overall deformation of the lining structure is not greatly affected by the assembly method, but is mainly controlled by the forced displacement of the formation.
- (2)
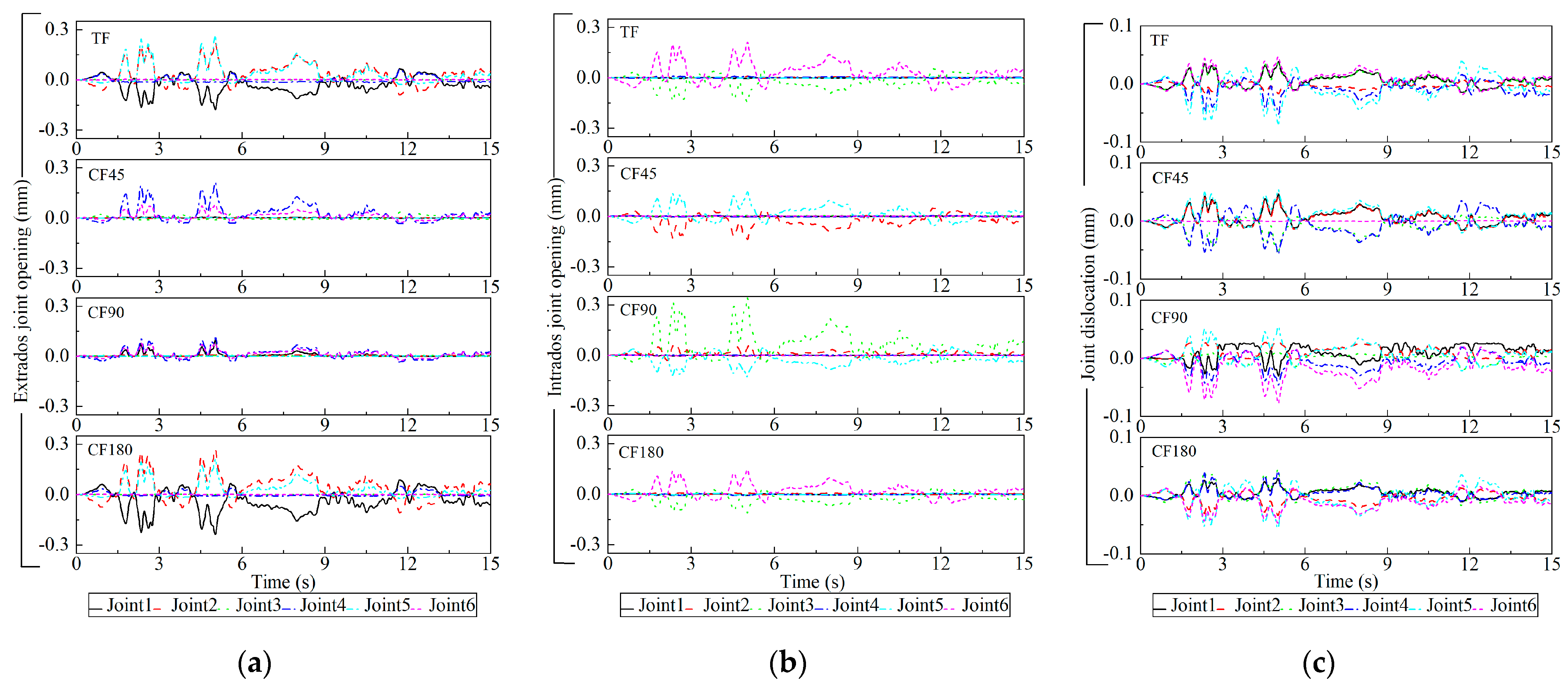
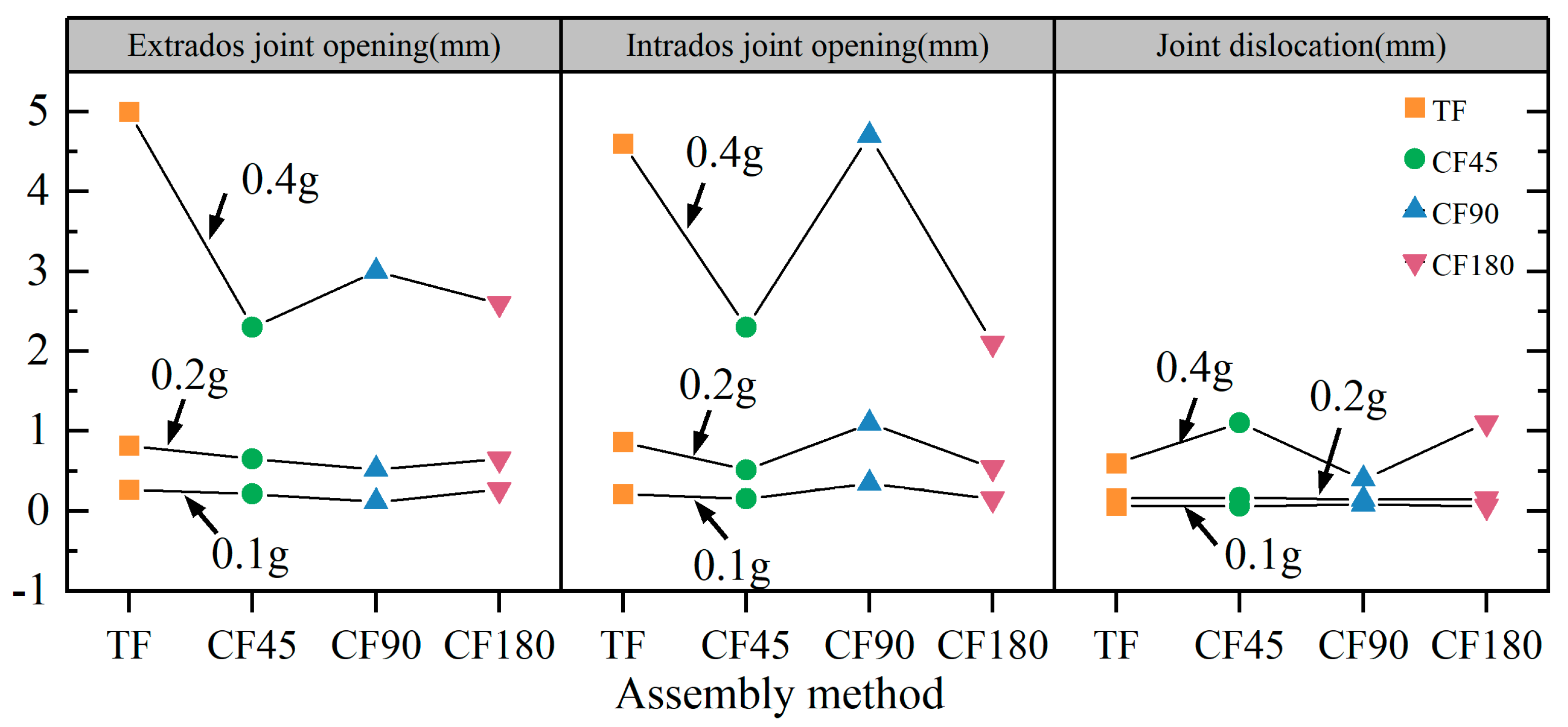
- The joint deformation of the segment joints and the internal force distribution of the connecting bolts are heterogeneous, and the location of the maximum joint deformation will change depending on the assembly method. The joint deformation and bolt internal force under the condition of staggered assembly at 90° are more obvious than those of the other three assembly methods, and the internal force distribution of the tunnel structure is less affected by the assembly method. The internal force of the lining is relatively large near the 45° angle with the vault, and the internal force decreases at the joint deformation, which changes the numerical law of the internal force of the tunnel structure.
- (3)
- During the action of 0.4 g earthquake intensity, the deformation of the joints and the internal force of the bolts of shield tunnels assembled with straight assembly and staggered 90°assembly exceed the limit, while the other two staggered joint assembly methods can maintain safety and waterproof performance. One should avoid placing the capping block on the spandrel for the staggered assembly method from the perspective of earthquake resistance.
- (4)
- Under the conditions of staggered assembly, the maximum difference in internal force between 1.5 m width and 1.2 m width exceeds 40%, indicating that the internal force characteristics of the structure are significantly affected by changes in the structural stiffness due to changes in segment width.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Shen, Y.; Zhang, D.; Wang, R.; Li, J.; Huang, Z. Sbd-k-medoids-based long-term settlement analysis of shield tunnel. Transp. Geotech. 2023, 42, 101053. [Google Scholar] [CrossRef]
- Xu, L.; Guo, J.; Xu, C.; Chen, R.; Lin, J. Study on Dynamic Response of Soil Layer at the Bottom of Subway Shield Tunnel under Seismic Action. Geotech. Geol. Eng. 2022, 41, 1635–1646. [Google Scholar] [CrossRef]
- Masanori, H. Dynamic Behaviors of Underground Structures during Earthquakes and Earthquake-Resistant Design; Springer: Berlin/Heidelberg, Germany, 2014; pp. 229–273. [Google Scholar]
- Yang, L.; Xu, C.; Du, X. Causal Analyses of Different Degree of Earthquake Damage Occurred on Daikai Subway Station and Its Running Tunnels during Kobe Earthquake. J. Disaster Prev. Mitig. Eng. 2020, 40, 326–336. [Google Scholar]
- Liu, R.; Zhu, Z. Review of Earthquake Damage Prediction for Underground Structures. China Earthq. Eng. J. 2020, 42, 1349–1360. [Google Scholar]
- Liu, X.; Bai, Y.; Yuan, Y.; Mang, H.A. Experimental Investigation of the Ultimate Bearing Capacity of Continuously Jointed Segmental Tunnel Linings. Struct. Infrastruct. Eng. 2016, 12, 1364–1379. [Google Scholar] [CrossRef]
- Du, X.-L.; Li, Y.; Xu, C.-S.; Lu, D.-C.; Xu, Z.-G.; Jin, L. Review on Damage Causes and Disaster Mechanism of Daikai Subway Station During 1995 Osaka-Kobe Earthquake. Yantu Gongcheng Xuebao/Chin. J. Geotech. Eng. 2018, 40, 223–236. [Google Scholar]
- Weng, M.-C.; Wu, J.-H.; Hwang, J.-H.; Chigira, M.; Massey, C. Preface to the Special Issue of Geo-Hazards Induced by the 1999 Chi-Chi Earthquake, Taiwan: Lessons Learned and Progress in Two Decades. Eng. Geol. 2022, 297, 106505. [Google Scholar] [CrossRef]
- Huang, Z.K.; Pitilakis, K.; Tsinidis, G.; Argyroudis, S.; Zhang, D.M. Seismic Vulnerability of Circular Tunnels in Soft Soil Deposits: The Case of Shanghai Metropolitan System. Tunn. Undergr. Space Technol. 2020, 98, 103341. [Google Scholar] [CrossRef]
- Gong, G.; Liang, J.; Ba, Z.; Xu, A.; Yan, Q.; Wang, Z. Seismic Transverse Time-History Analysis of Shield Tunnel in Complex Soft Soil. Tianjin Daxue Xuebao (Ziran Kexue Yu Gongcheng Jishu Ban)/J. Tianjin Univ. Sci. Technol. 2019, 52, 106–112. [Google Scholar]
- Dong, S.H.; Zhang, X.Y.; Jia, C.X.; Li, S.Q.; Wang, K. Study on Seismic Response and Vibration Reduction of Shield Tunnel Lining in Coastal Areas. Sustainability 2023, 15, 4185. [Google Scholar] [CrossRef]
- Khan, M.A.; Sadique, M.R.; Harahap, I.H.; Zaid, M.; Alam, M.M. Static and Dynamic Analysis of the Shielded Tunnel in Alluvium Soil with 2d Fem Model. Transp. Infrastruct. Geotechnol. 2022, 9, 73–100. [Google Scholar] [CrossRef]
- Arnau, O.; Molins, C. Theoretical and Numerical Analysis of the Three-Dimensional Response of Segmental Tunnel Linings Subjected to Localized Loads. Tunn. Undergr. Space Technol. 2015, 49, 384–399. [Google Scholar] [CrossRef]
- Shen, Y.; Zhong, Z.; Li, L.; Du, X.; El Naggar, M.H. Seismic Response of Shield Tunnel Structure Embedded in Soil Deposit with Liquefiable Interlayer. Comput. Geotech. 2022, 152, 105015. [Google Scholar] [CrossRef]
- Zhang, W.-J.; Cao, W.-Z. Mechanical and Waterproof Performances of Joints of Shield Tunnels with Large Cross-Section under Earthquakes. Yantu Gongcheng Xuebao/Chin. J. Geotech. Eng. 2021, 43, 653–660. [Google Scholar]
- Zhu, T.; Wang, R.; Zhang, J.-M. Seismic Response Analysis of Shield Tunnels in Liquefiable Soils. Yantu Gongcheng Xuebao/Chin. J. Geotech. Eng. 2019, 41, 57–60. [Google Scholar]
- Wu, H.; He, C.; Yan, Q.; Feng, K.; Cheng, T. A Study on Curve Fitting Algorithm of Curved Shield Tunnels Assembled by Universal Wedge Segments and Its Application. Tiedao Xuebao/J. China Railw. Soc. 2016, 38, 90–98. [Google Scholar]
- Wang, S.; Shen, X.; He, X.; Yao, J. A Model Test for the Mechanical Property and Failure Mode of Lining Segments with Different Assembly Types of Shield Tunnel. China Civ. Eng. J. 2017, 50, 114–124. [Google Scholar]
- Blom, C.B.M.; Van Der Horst, E.J.; Jovanovic, P.S. Three-Dimensional Structural Analyses of the Shield-Driven ‘Green Heart’ Tunnel of the High-Speed Line South. Tunn. Undergr. Space Technol. 1999, 14, 217–224. [Google Scholar] [CrossRef]
- Li, W.; He, C. Study on Mechanical Behavior and Controlling Assembling Modes of Universal Segment Lining for Shield Tunnel. Tiedao Xuebao/J. China Railw. Soc. 2007, 29, 77–82. [Google Scholar]
- Teachavorasinskun, S.; Chub-uppakarn, T. Influence of Segmental Joints on Tunnel Lining. Tunn. Undergr. Space Technol. 2010, 25, 490–494. [Google Scholar] [CrossRef]
- Feng, K.; He, C.; Su, Z. Prototype Test on Failure Characteristics of Segmental Lining Structure for Nanjing Yangtze River Tunnel. Xinan Jiaotong Daxue Xuebao/J. Southwest Jiaotong Univ. 2011, 46, 564–571. [Google Scholar]
- Wang, R.-L.; Zhang, D.-M. Mechanism of Transverse Deformation and Assessment Index for Shield Tunnels in Soft Clay under Surface Surcharge. Yantu Gongcheng Xuebao/Chin. J. Geotech. Eng. 2013, 35, 1092–1101. [Google Scholar]
- Liu, X.; Zhang, Y.; Wang, R. Discussion on Deformation and Failure of Segmental Metro Tunnel Linings. China Civ. Eng. J. 2020, 53, 118–128. [Google Scholar]
- Zhao, W.-S.; He, X.-Z.; Chen, W.-Z.; Yang, J.-P.; Wang, H.; Yuan, J.-Q. Method for Analyzing Seismic Response of Shield Tunnel and Its Application. Yantu Lixue/Rock Soil Mech. 2012, 33, 2415–2421. [Google Scholar]
- Wang, C.; Tang, P.; Zhuang, H.; Yang, M. Seismic Performance of Large Shield Tunnel under the Yangzi River with Considering the Staggered Joints. J. Nat. Disasters 2021, 30, 116–123. [Google Scholar]
- Gou, Y.; Huang, Q.; Wang, L.; Yan, Y.; Jia, S. Study on Structural Behaviors and Adaptability of Shield Tunnel in the Ground Fissure Environment. Railw. Stand. Des. 2020, 64, 117–125. [Google Scholar]
- Chen, H.-W. Seismic Response Analysis of Shield Tunnel Considering Joint Effect. Urban Rapid Rail Transit 2018, 31, 78–85. [Google Scholar]
- Zhang, W.; Lu, Q.; Zhang, G.; Li, H. Study on Dynamic Response of Shield Tunnel Ring Structure by Cap Location. Chin. J. Undergr. Space Eng. 2020, 16, 588–595+609. [Google Scholar]
- Zhuang, H.; Hu, Z.; Wang, X.; Chen, G. Seismic Responses of a Large Underground Structure in Liquefied Soils by Fem Numerical Modelling. Bull. Earthq. Eng. 2015, 13, 3645–3668. [Google Scholar] [CrossRef]
- Sharari, N.; Fatahi, B.; Hokmabadi, A.S.; Xu, R. Impacts of Pile Foundation Arrangement on Seismic Response of Lng Tanks Considering Soil–Foundation–Structure Interaction. J. Perform. Constr. Facil. 2022, 36, 04021110. [Google Scholar] [CrossRef]
- Tao, L.; Ding, P.; Lin, H.; Wang, H.; Kou, W.; Shi, C.; Li, S.; Wu, S. Three-Dimensional Seismic Performance Analysis of Large and Complex Underground Pipe Trench Structure. Soil Dyn. Earthq. Eng. 2021, 150, 106904. [Google Scholar] [CrossRef]
- Zhuang, H.-Y.; Ren, J.-W.; Wang, R.; Miao, Y.; Chen, G.-X. Elasto-Plastic Working States and Seismic Performance Levels of Frame-Type Subway Underground Station with Two Layers and Three Spans. Yantu Gongcheng Xuebao/Chin. J. Geotech. Eng. 2019, 41, 131–138. [Google Scholar]
- Pakbaz, M.C.; Yareevand, A. 2-D Analysis of Circular Tunnel against Earthquake Loading. Tunn. Undergr. Space Technol. 2005, 20, 411–417. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Thickness (m) | Density (kg/m3) | Poisson’s Ratio | Elastic Modulus (MPa) | φ | Cohesion (kPa) |
|---|---|---|---|---|---|---|
| Muddy silty clay | 0~18 | 1780 | 0.35 | 77 | 16° | 20 |
| Silty fine sand | 18~21 | 2000 | 0.28 | 300 | 30° | 0 |
| Muddy silty clay | 21~39 | 1780 | 0.35 | 84 | 16° | 20 |
| Silty clay | 39~50 | 1840 | 0.32 | 300 | 20° | 36 |
| Concrete | - | 2500 | 0.2 | 3.45 × 104 | - | - |
| Bolt | - | 7800 | 0.2 | 2.10 × 105 | - | - |
| Assembling Method | Schematic Diagram | Instructions |
|---|---|---|
| CF45 |  | The front and rear proximity rings rotate 45 degrees relative to the middle ring |
| CF90 |  | The front and rear proximity rings rotate 90 degrees relative to the middle ring |
| CF180 |  | The front and rear proximity rings rotate 180 degrees relative to the middle ring |
| TF |  | Straight assembly |
| Assembly Method | Seismic Wave | MAPS (MPa) | MIPS (MPa) |
|---|---|---|---|
| TF | PGA = 0.1 g | 2.54 | 7.25 |
| CF45 | 3.82 | 6.89 | |
| CF90 | 3.98 | 7.02 | |
| CF180 | 3.94 | 7.63 | |
| TF | PGA = 0.2 g | 3.98 | 8.70 |
| CF45 | 6.17 | 8.11 | |
| CF90 | 5.98 | 8.25 | |
| CF180 | 5.89 | 8.70 | |
| TF | PGA = 0.4 g | 8.85 | 20.06 |
| CF45 | 19.1 | 19.64 | |
| CF90 | 19.6 | 19.64 | |
| CF180 | 19.2 | 20.01 |
| Research Object | Mechanical Property | Joint Deformation | Bolt Internal Force | Stress Property | Seismic Performance Evaluation |
|---|---|---|---|---|---|
| Assembly method | Radial force/ Circumferential force/ Bending moment | Extrados opening/ Intrados opening/ Dislocation | Axial force/ Shear force | MAPS/ MIPS | |
| TF CF45 CF90 CF180 | 706 kN (CF90)/556 kN (CF45)/190 kN·m (CF45) | 5 mm (TF)/ 4.7 mm (CF90)/ 1.1 mm (CF180) | 490 kN (TF)/ 239 kN(CF180) | 19.6 MPa (CF90)/ 20.6 MPa (TF) | The methods TF and CF90 do not meet the seismic design requirements |
| Research Object | Mechanical Property | Joint Deformation | Bolt Internal Force | Stress Property | Seismic Performance Evaluation |
|---|---|---|---|---|---|
| Segment Width | Radial force/ Circumferential force/ Bending moment | Extrados opening/ Intrados opening/ Dislocation | Axial force/ Shear force | MAPS/ MIPS | |
| TF1.2 CF1.2 TF1.5 CF1.5 | 905 kN (TF1.5)/ 582 kN (CF1.5)/ 280 N·m (CF1.5) | 5 mm (TF1.2)/ 4.6 mm (TF1.2)/ 1.1 mm (CF1.2) | 490 kN (TF1.2)/ 239 kN (CF1.2) | 16.7 MPa (CF1.2)/ 19.5 MPa (TF1.2) | Shielded tunnel with a 1.5 m width segment is better than the 1.2 m wide shielded tunnel in terms of seismic performance |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Gao, Z.; Wang, S.; Chen, B.; Mao, C. Study on the Seismic Response Characteristics of Shield Tunnels with Different General Segment Assembly Methods and Widths. Buildings 2023, 13, 2039. https://doi.org/10.3390/buildings13082039
Zhang S, Gao Z, Wang S, Chen B, Mao C. Study on the Seismic Response Characteristics of Shield Tunnels with Different General Segment Assembly Methods and Widths. Buildings. 2023; 13(8):2039. https://doi.org/10.3390/buildings13082039
Chicago/Turabian StyleZhang, Shuaifa, Zhihua Gao, Sui Wang, Bin Chen, and Chaozeng Mao. 2023. "Study on the Seismic Response Characteristics of Shield Tunnels with Different General Segment Assembly Methods and Widths" Buildings 13, no. 8: 2039. https://doi.org/10.3390/buildings13082039