

Theoretical and Numerical Examination of a Novel Method for Identifying Bridge Moving Force Using an Instrumented Vehicle

Abstract
:1. Introduction
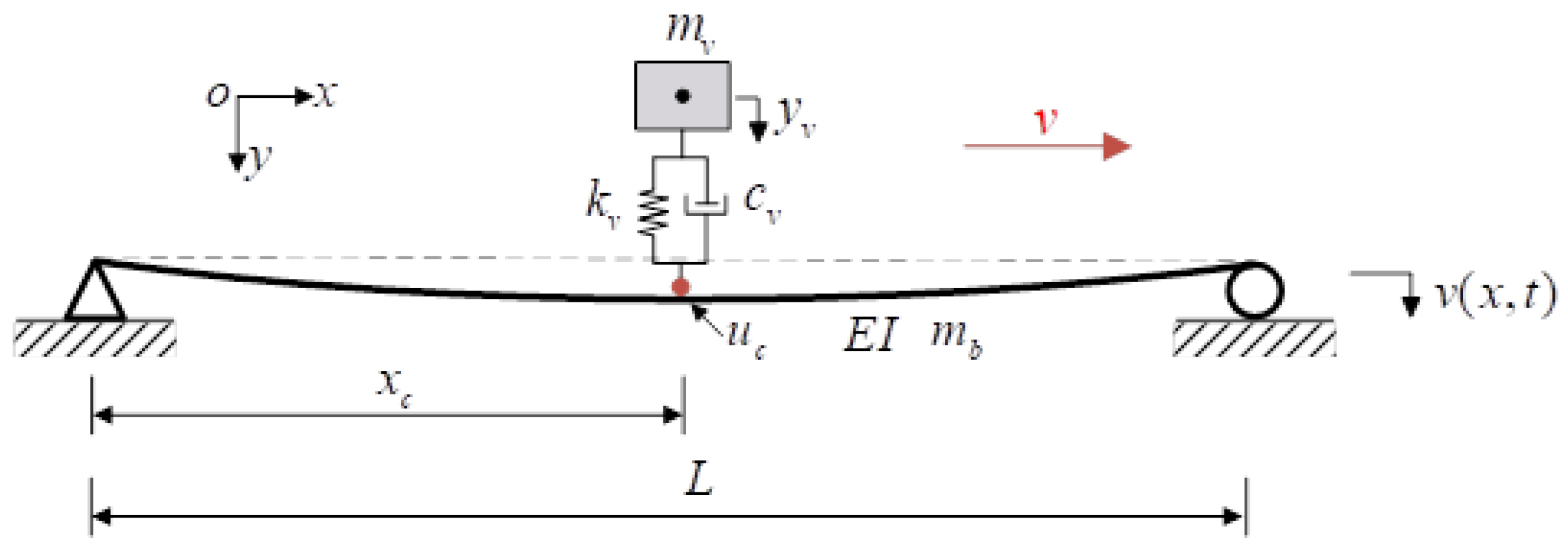
2. Theoretical Background of the Problem
3. Tikhonov Regularisation
4. Finite Element Method for Vehicle–Bridge Interaction Analysis
5. Identifying Procedures for the Proposed Method
6. Numerical Verifications
7. Parametric Analyses of Various Influencing Factors
7.1. Effect of Road Roughness
7.2. Effect of Running Speed
7.3. Effect of the Environmental Noise Level
8. Conclusions
- (1)
- Unlike the existing identification methods, our approach does not necessitate the installation of sensors on the bridge. Instead, the moving contact force can be identified readily through sensors installed on the moving vehicle. This provides a new idea for moving load identification on small- and medium-span bridges.
- (2)
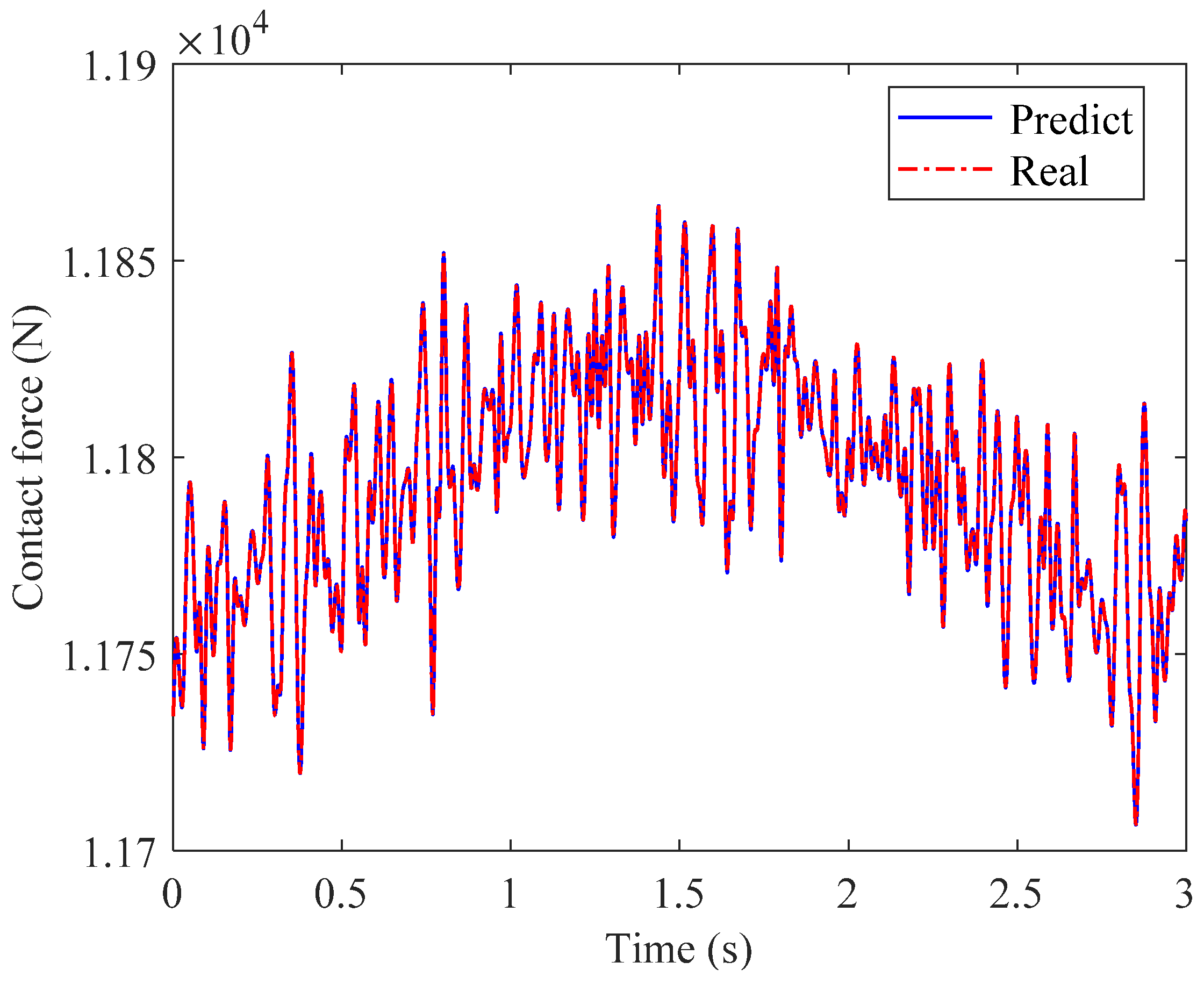
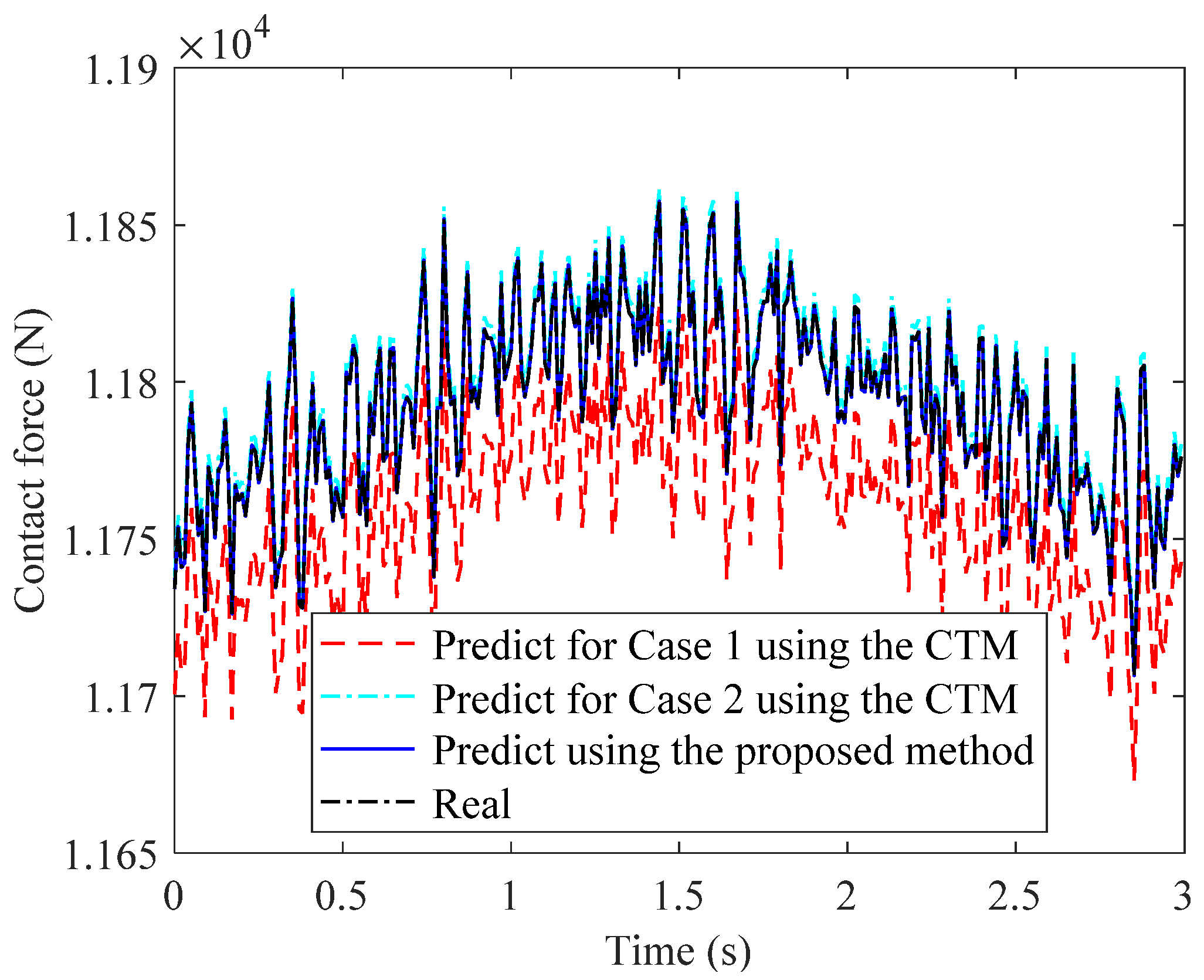
- The proposed method demonstrates high precision in identifying the moving contact force by comparing with the real values and those identified using the CTM method.
- (3)
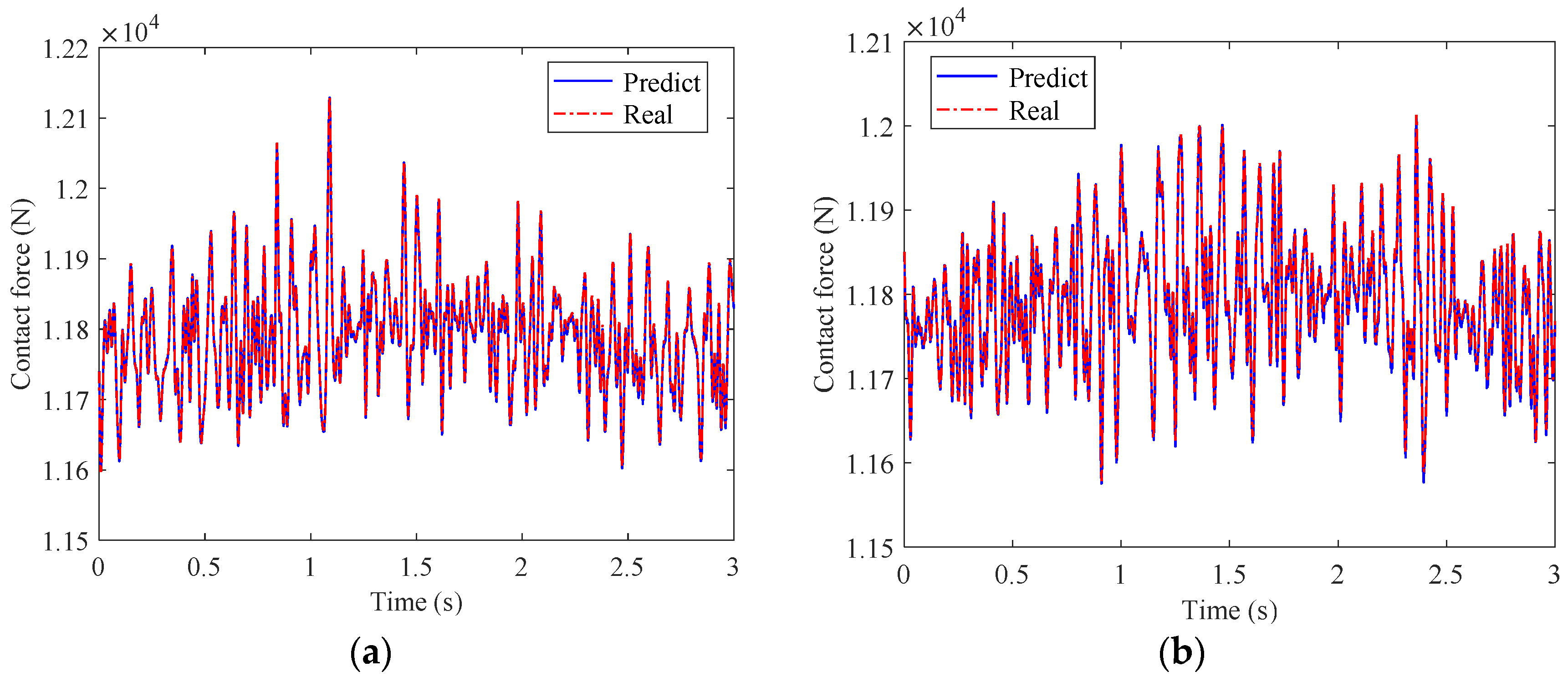
- The moving load can be effectively identified even under conditions of poor road roughness in Class C.
- (4)
- The effect of moving speed is limited for the proposed method; however, an intermediate speed of 10 m/s is recommended for field testing.
- (5)
- Environmental noise can affect the identification accuracy to an acceptable extent. Control of the environment noise level within 10% for the proposed method is recommended in actual applications.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- He, X.H.; Shi, K.; Wu, T. An integrated structural health monitoring system for the Xijiang high-speed railway arch bridge. Smart Struct. Syst. 2018, 21, 611–621. [Google Scholar]
- He, Z.; Li, W.; Salehi, H.; Zhang, H.; Zhou, H.; Jiao, P. Integrated structural health monitoring in bridge engineering. Autom. Constr. 2022, 136, 104168. [Google Scholar] [CrossRef]
- Tian, Y.; Chen, C.; Sagoe-Crentsil, K.; Zhang, J.; Duan, W. Intelligent robotic systems for structural health monitoring: Applications and future trends. Autom. Constr. 2022, 139, 104273. [Google Scholar] [CrossRef]
- Niu, J.; Li, Z.; Zhuo, Y.; Di, H.; Wei, J.; Wang, X.; Guo, Y.; Li, S. Robust correlation mapping of train-induced stresses for high-speed railway bridge using convolutional denoising autoencoder. Struct. Health Monit. 2023, 22, 832–845. [Google Scholar] [CrossRef]
- Lei, X.; Xia, Y.; Wang, A.; Jian, X.; Zhong, H.; Sun, L. Mutual information based anomaly detection of monitoring data with attention mechanism and residual learning. Mech. Syst. Signal Process. 2023, 182, 109607. [Google Scholar] [CrossRef]
- Tang, Z.; Chen, Z.; Bao, Y.; Li, H. Convolutional neural network-based data anomaly detection method using multiple information for structural health monitoring. Struct. Control Health Monit. 2019, 26, e2296. [Google Scholar] [CrossRef] [Green Version]
- Ouyang, H. Moving-load dynamic problems: A tutorial (with a brief overview). Mech. Syst. Signal Process. 2011, 25, 2039–2060. [Google Scholar] [CrossRef]
- Zhu, X.Q.; Law, S.S. Recent developments in inverse problems of vehicle–bridge interaction dynamics. J. Civ. Struct. Health Monit. 2016, 6, 107–128. [Google Scholar] [CrossRef]
- Liu, R.; Dobriban, E.; Hou, Z.; Qian, K. Dynamic load identification for mechanical systems: A review. Arch. Comput. Methods Eng. 2022, 29, 831–863. [Google Scholar] [CrossRef]
- Yu, Y.; Cai, C.S.; Deng, L. State-of-the-art review on bridge weigh-in-motion technology. Adv. Struct. Eng. 2016, 19, 1514–1530. [Google Scholar] [CrossRef]
- Paul, D.; Roy, K. Application of bridge weigh-in-motion system in bridge health monitoring: A state-of-the-art review. Struct. Health Monit. 2023, 14759217231154431. [Google Scholar] [CrossRef]
- Law, S.S.; Chan, T.H.; Zeng, Q.H. Moving force identification: A time domain method. J. Sound Vib. 1997, 201, 1–22. [Google Scholar] [CrossRef]
- Zhu, X.Q.; Law, S.S. Moving forces identification on a multi-span continuous bridge. J. Sound Vib. 1999, 228, 377–396. [Google Scholar] [CrossRef]
- Liu, J.; Meng, X.; Jiang, C.; Han, X.; Zhang, D. Time-domain Galerkin method for dynamic load identification. Int. J. Numer. Methods Eng. 2016, 105, 620–640. [Google Scholar] [CrossRef]
- Liu, J.; Meng, X.; Zhang, D.; Jiang, C.; Han, X. An efficient method to reduce ill-posedness for structural dynamic load identification. Mech. Syst. Signal Process. 2017, 95, 273–285. [Google Scholar] [CrossRef]
- Chen, Z.; Qin, L.; Chan, T.H.; Yu, L. A novel preconditioned range restricted GMRES algorithm for moving force identification and its experimental validation. Mech. Syst. Signal Process. 2021, 155, 107635. [Google Scholar] [CrossRef]
- Yu, L.; Chan, T.H. Moving force identification based on the frequency–time domain method. J. Sound Vib. 2003, 261, 329–349. [Google Scholar] [CrossRef]
- Lage, Y.E.; Maia, N.M.M.; Neves, M.M.; Ribeiro, A.M.R. Force identification using the concept of displacement transmissibility. J. Sound Vib. 2013, 332, 1674–1686. [Google Scholar] [CrossRef]
- Aucejo, M.; De Smet, O. A space-frequency multiplicative regularization for force reconstruction problems. Mech. Syst. Signal Process. 2018, 104, 1–18. [Google Scholar] [CrossRef] [Green Version]
- He, Z.C.; Lin, X.Y.; Li, E. A novel method for load bounds identification for uncertain structures in frequency domain. Int. J. Comput. Methods 2018, 15, 1850051. [Google Scholar] [CrossRef]
- Yan, W.J.; Yuen, K.V. A new probabilistic frequency-domain approach for influence line extraction from static transmissibility measurements under unknown moving loads. Eng. Struct. 2020, 216, 110625. [Google Scholar] [CrossRef]
- Sanchez, J.; Benaroya, H. Review of force reconstruction techniques. J. Sound Vib. 2014, 333, 2999–3018. [Google Scholar] [CrossRef]
- Tran, H.; Inoue, H. Development of wavelet deconvolution technique for impact force reconstruction: Application to reconstruction of impact force acting on a load-cell. Int. J. Impact Eng. 2018, 122, 137–147. [Google Scholar] [CrossRef]
- Chen, Z.; Chan, T.H. A truncated generalized singular value decomposition algorithm for moving force identification with ill-posed problems. J. Sound Vib. 2017, 401, 297–310. [Google Scholar] [CrossRef]
- Chen, Z.; Chan, T.H.; Nguyen, A. Moving force identification based on modified preconditioned conjugate gradient method. J. Sound Vib. 2018, 423, 100–117. [Google Scholar] [CrossRef]
- Chen, Z.; Chan, T.H.; Nguyen, A.; Yu, L. Identification of vehicle axle loads from bridge responses using preconditioned least square QR-factorization algorithm. Mech. Syst. Signal Process. 2019, 128, 479–496. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Qin, L.; Zhao, S.; Chan, T.H.; Nguyen, A. Toward efficacy of piecewise polynomial truncated singular value decomposition algorithm in moving force identification. Adv. Struct. Eng. 2019, 22, 2687–2698. [Google Scholar] [CrossRef]
- Chen, Z.; Chan, T.H.; Yu, L. Comparison of regularization methods for moving force identification with ill-posed problems. J. Sound Vib. 2020, 478, 115349. [Google Scholar] [CrossRef]
- Chen, Z.; Deng, L.; Kong, X. Modified truncated singular value decomposition method for moving force identification. Adv. Struct. Eng. 2022, 25, 2609–2623. [Google Scholar] [CrossRef]
- Pan, C.D.; Yu, L.; Liu, H.L.; Chen, Z.P.; Luo, W.F. Moving force identification based on redundant concatenated dictionary and weighted l1-norm regularization. Mech. Syst. Signal Process. 2018, 98, 32–49. [Google Scholar] [CrossRef]
- Pan, C.; Ye, X.; Zhou, J.; Sun, Z. Matrix regularization-based method for large-scale inverse problem of force identification. Mech. Syst. Signal Process. 2020, 140, 106698. [Google Scholar] [CrossRef]
- Pan, C.; Huang, Z.; You, J.; Li, Y.; Yang, L. Moving force identification based on sparse regularization combined with moving average constraint. J. Sound Vib. 2021, 515, 116496. [Google Scholar] [CrossRef]
- Chudong, P.; Liwen, Z.; Xijun, Y.; Zhuo, S. Vehicle weight identification based on equivalent loads reconstructed from responses of beam-like bridge. J. Sound Vib. 2022, 534, 117072. [Google Scholar] [CrossRef]
- Zhou, H.C.; Li, H.N.; Yang, D.H.; Yi, T.H. Moving force identification of simply supported bridges through the integral time domain method. J. Sound Vib. 2022, 534, 117046. [Google Scholar] [CrossRef]
- Zhang, Z.H.; He, W.Y.; Ren, W.X. Moving force identification based on learning dictionary with double sparsity. Mech. Syst. Signal Process. 2022, 170, 108811. [Google Scholar] [CrossRef]
- He, W.Y.; Li, Y.L.; Yi, J.X.; Ren, W.X. Time-domain identification of moving load on beam type bridges considering interval uncertainty in finite element model. Mech. Syst. Signal Process. 2023, 191, 110168. [Google Scholar] [CrossRef]
- Newmark, N.M. A method of computation for structural dynamics. J. Eng. Mech. Div. 1959, 85, 67–94. [Google Scholar] [CrossRef]
- Liu, K.; Law, S.S.; Zhu, X.Q.; Xia, Y. Explicit form of an implicit method for inverse force identification. J. Sound Vib. 2014, 333, 730–744. [Google Scholar] [CrossRef]
- Jiang, J.; Seaid, M.; Mohamed, M.S.; Li, H. Inverse algorithm for real-time road roughness estimation for autonomous vehicles. Arch. Appl. Mech. 2020, 90, 1333–1348. [Google Scholar] [CrossRef]
- Jiang, J.; Ding, M.; Li, J. A novel time-domain dynamic load identification numerical algorithm for continuous systems. Mech. Syst. Signal Process. 2021, 160, 107881. [Google Scholar] [CrossRef]
- Pourzeynali, S.; Zhu, X.; Ghari Zadeh, A.; Rashidi, M.; Samali, B. Comprehensive study of moving load identification on bridge structures using the explicit form of Newmark-β method: Numerical and experimental studies. Remote Sens. 2021, 13, 2291. [Google Scholar] [CrossRef]
- Xin, J.; Jiang, Y.; Zhou, J.; Peng, L.; Liu, S.; Tang, Q. Bridge deformation prediction based on SHM data using improved VMD and conditional KDE. Eng. Struct. 2022, 261, 114285. [Google Scholar] [CrossRef]
- Jiang, Y.; Hui, Y.; Wang, Y.; Peng, L.; Huang, G.; Liu, S. A novel eigenvalue-based iterative simulation method for multi-dimensional homogeneous non-Gaussian stochastic vector fields. Struct. Saf. 2023, 100, 102290. [Google Scholar] [CrossRef]
- Li, S.; Xin, J.; Jiang, Y.; Wang, C.; Zhou, J.; Yang, X. Temperature-induced deflection separation based on bridge deflection data using the TVFEMD-PE-KLD method. J. Civ. Struct. Health Monit. 2023, 13, 781–797. [Google Scholar] [CrossRef]
- Yang, Y.B.; Lin, C.W.; Yau, J.D. Extracting bridge frequencies from the dynamic response of a passing vehicle. J. Sound Vib. 2004, 272, 471–493. [Google Scholar] [CrossRef]
- Yang, Y.B.; Yang, J.P.; Wu, Y.; Zhang, B. Vehicle Scanning Method for Bridges; John Wiley & Sons: Hoboken, NJ, USA, 2019. [Google Scholar]
- Yang, Y.B.; Wang, Z.L.; Shi, K.; Xu, H.; Wu, Y.T. State-of-the-art of vehicle-based methods for detecting various properties of highway bridges and railway tracks. Int. J. Struct. Stab. Dyn. 2020, 20, 2041004. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle | |||
| Mass | kg | 1200 | |
| Spring stiffness | N/m | 5.0 × 104 | |
| Bridge | |||
| Young’s modulus | N/m2 | 2.75 × 1010 | |
| Moment of inertia | m4 | 0.20 | |
| Mass per unit length | kg/m | 2400 | |
| Length | m | 30 | |
| No. Case | Locations for the Sensors | Quantity Sensors |
|---|---|---|
| Case 1 | 1/4 span, 1/2 span, and 3/4 span | Three |
| Case 2 | 1/6 span, 1/3 span, 1/2 span, 2/3 span, and 5/6 span | Five |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, D.; Liu, B.; Li, X.; Shi, K. Theoretical and Numerical Examination of a Novel Method for Identifying Bridge Moving Force Using an Instrumented Vehicle. Buildings 2023, 13, 1481. https://doi.org/10.3390/buildings13061481
Liu D, Liu B, Li X, Shi K. Theoretical and Numerical Examination of a Novel Method for Identifying Bridge Moving Force Using an Instrumented Vehicle. Buildings. 2023; 13(6):1481. https://doi.org/10.3390/buildings13061481
Chicago/Turabian StyleLiu, Dexin, Bo Liu, Xingui Li, and Kang Shi. 2023. "Theoretical and Numerical Examination of a Novel Method for Identifying Bridge Moving Force Using an Instrumented Vehicle" Buildings 13, no. 6: 1481. https://doi.org/10.3390/buildings13061481