
Ground Deformation Monitoring for Subway Structure Safety Based on GNSS


Abstract
:1. Introduction
2. Methodology
2.1. High-Precision Calculation of GNSS Data
2.2. Robust Local Mean Decomposition (RLMD)
2.3. Singular Value Decomposition for Noise Reduction
2.4. Ground Deformation Monitoring System along the Subway Based on the GNSS Monitoring Signal
- (1)
- Sensor subsystem: consists of each GNSS monitoring unit and is responsible for collecting monitoring data from ground deformation monitoring points along the subway;
- (2)
- Data transmission subsystem: responsible for the real-time transmission of the data collected by the sensor system to the control center. Specific transmission methods generally use optical fiber, wireless bridges, and other media for reliable, effective, and stable performance. It uses multiple methods to coexist, even solving problems related to long distances and wiring trouble, and can also be used to set up a wireless base station;
- (3)
- Auxiliary support system: consists of a monitoring field and monitoring center to assist the normal operation of all GNSS automated monitoring system equipment, including power distribution and UPS, lightning protection, integrated wiring, field cabinets, and other subsystems;
- (4)
- Data processing and control subsystem: consists of a small computer system, server system, and software system located in the monitoring center.
3. Results
3.1. GNSS Measurement Points
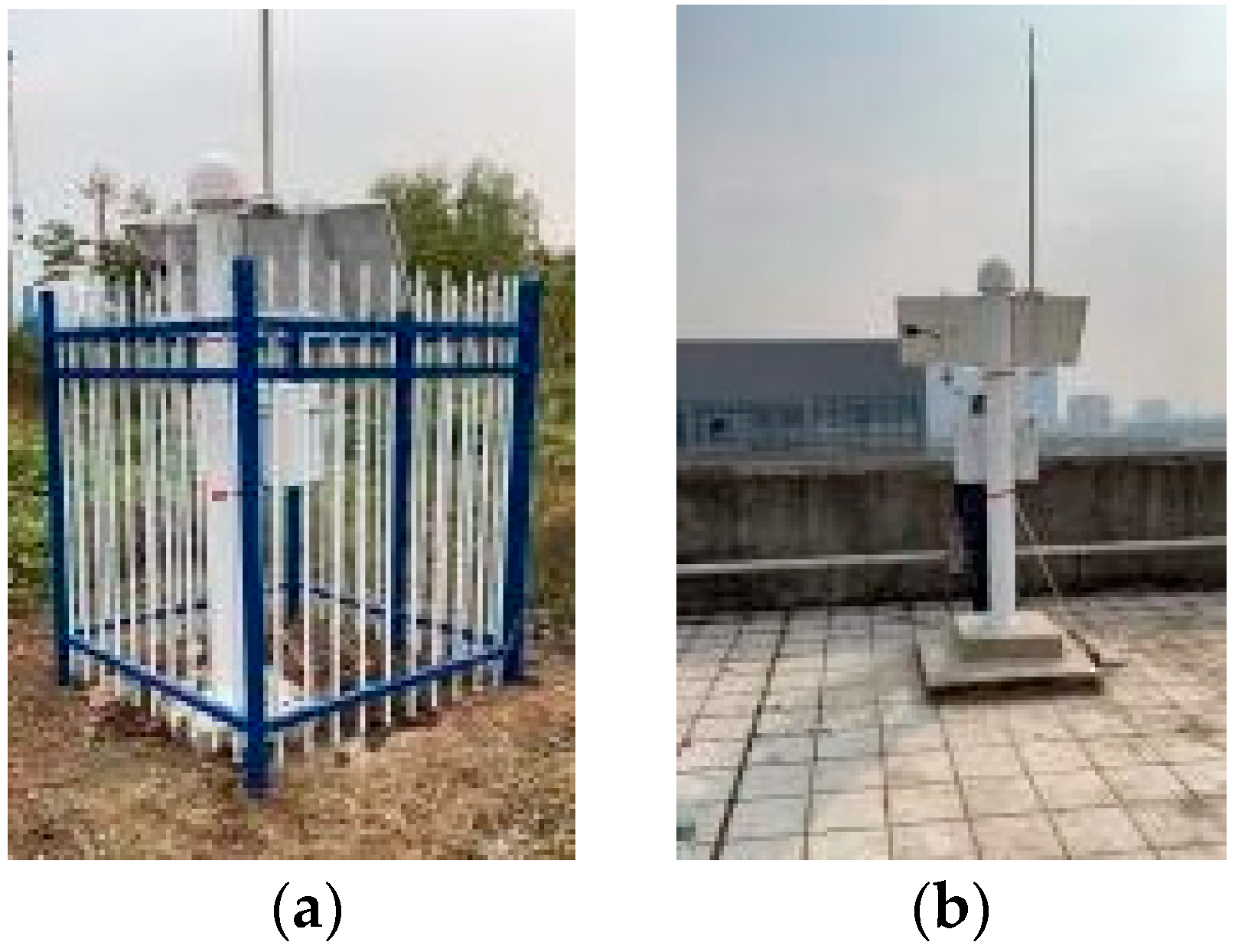
3.1.1. Integrated BeiDou Monitoring Equipment
3.1.2. Layout of Measurement Points
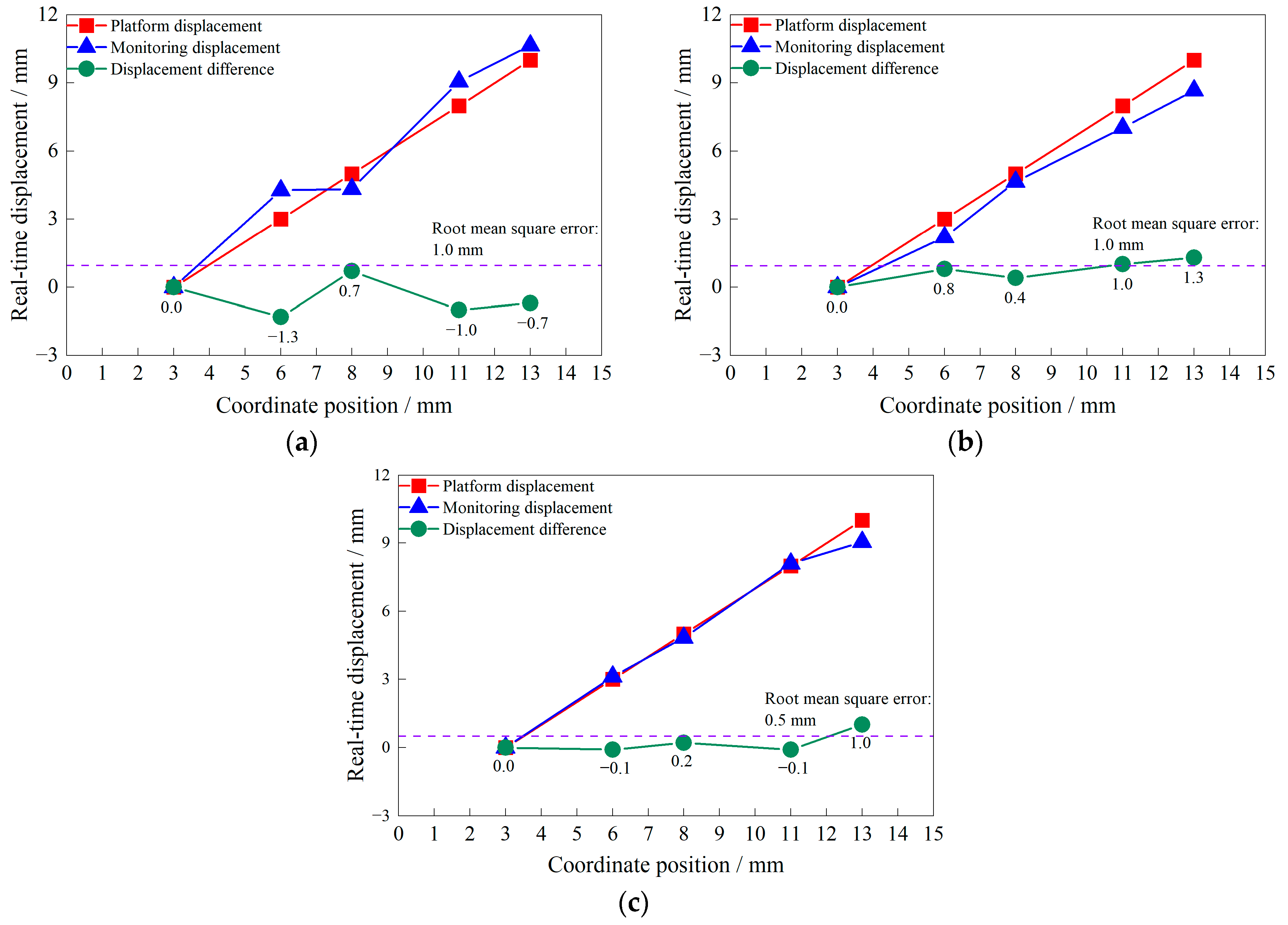
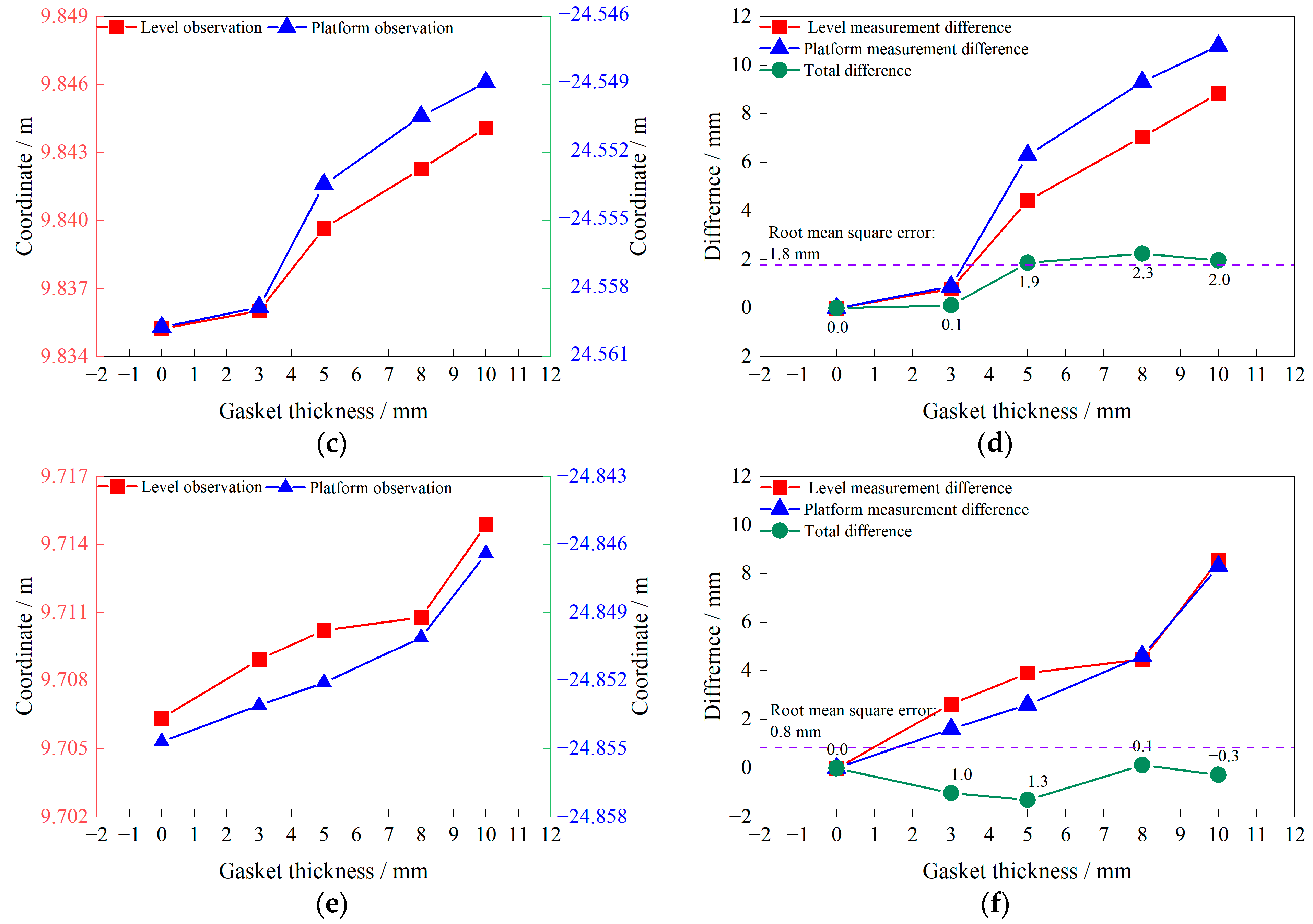
3.2. RLMD-SVD Joint Denoising Method
4. Discussion
5. Conclusions
- (1)
- A ground deformation monitoring system for subway structure safety based on the GNSS was established. Compared to traditional engineering observation methods, the system has achieved the convenience and automated monitoring of surface deformation;
- (2)
- The ground deformation monitoring system makes up for the shortcomings of the traditional method; however, due to the influence of environmental noise and other factors, it will produce a certain degree of error. A RLMD–SVD joint denoising method is proposed. The ground deformation monitoring system noise-reduction results show that up to 86% of the noise in the data can be reduced. Using the RLMD–SVD joint denoising method more effectively eliminates the noise in the ground deformation monitoring system signal compared to the SVD and RLMD methods alone;
- (3)
- The RLMD–SVD joint denoising method improves the horizontal and vertical localization accuracy of the ground deformation monitoring system. The vertical positioning accuracy of the deformation monitoring system was greater than 2.7 mm, the horizontal positioning accuracy was greater than 1.3 mm, and the measurement error was less than 1.5 mm, meeting the ground deformation observation technical requirements of a subway structure. It provides a new method for ground deformation monitoring.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lazarus, D. Structural engineering for the Elizabeth line: Damage Assessment and Monitoring for Buildings on the Elizabeth Line. Struct. Eng. J. Inst. Struct. Eng. 2018, 96, 14–24. [Google Scholar] [CrossRef]
- Torp-Petersen, G.E.; Black, M.G. Geotechnical Investigation and Assessment of Potential Building Damage Arising from Ground Movements: CrossRail. Proc. Inst. Civ. Eng.-Transport. 2001, 147, 107–119. [Google Scholar] [CrossRef]
- Szabo, B.; Brzeski, J.; González Martí, J. Use of Linked Monitoring Systems for Asset Protection at Finsbury Circus during SCL Tunnelling for Crossrail Station. In Crossrail Project: Infrastructure Design and Construction; ICE Publishing: London, UK, 2015; pp. 315–345. [Google Scholar] [CrossRef]
- Korff, M.; Kaalberg, F. Monitoring Dataset of Deformations Related to Deep Excavations for North-South Line in Amsterdam. In Geotechnical Aspects of Underground Construction in Soft Ground; Korean Geotechnical Society: Seoul, Republic of Korea, 2014; pp. 321–326. [Google Scholar] [CrossRef]
- Schiess, S.; Berget, G.E.; Arnesen, P.; Brunes, M.T.; Seter, H.; Muggerud, A.M.F. GNSS Technology for Precise Positioning in CCAM: A Comparative Evaluation of Services. IEEE Access 2023, 11, 47816–47826. [Google Scholar] [CrossRef]
- Yu, W.; Peng, H.; Pan, L.; Dai, W.; Qu, X.; Ren, Z. Performance Assessment of High-Rate GPS/BDS Precise Point Positioning for Vibration Monitoring Based on Shaking Table Tests. Adv. Space Res. 2022, 69, 2362–2375. [Google Scholar] [CrossRef]
- Lee, J.; Lee, W.; Lee, H.; Yoon, H. The Settlement Analysis of the Saemenguem Coastal Area by the Tide Using D-InSAR. J. Coast. Res. 2019, 91, 361. [Google Scholar] [CrossRef]
- Bovenga, F.; Nitti, D.O.; Fornaro, G.; Radicioni, F.; Stoppini, A.; Brigante, R. Using C/X-Band SAR Interferometry and GNSS Measurements for the Assisi Landslide Analysis. Int. J. Remote Sens. 2013, 34, 4083–4104. [Google Scholar] [CrossRef]
- Adamcová, D.; Bartoň, S.; Osinski, P.; Pasternak, G.; Podlasek, A.; Vaverková, M.D.; Koda, E. Analytical Modelling of MSW Landfill Surface Displacement Based on GNSS Monitoring. Sensors 2020, 20, 5998. [Google Scholar] [CrossRef] [PubMed]
- Iwahana, G.; Busey, R.; Saito, K. Seasonal and Interannual Ground-Surface Displacement in Intact and Disturbed Tundra along the Dalton Highway on the North Slope, Alaska. Land 2020, 10, 22. [Google Scholar] [CrossRef]
- Kyriou, A.; Kakavas, M.; Nikolakopoulos, K.G.; Koukouvelas, I.; Stefanopoulos, P.; Zygouri, V.; Tsigalidas, D. Landslide Mapping and Volume Estimation Using UAV-Based Point Clouds, GIS and Geophysical Techniques. In Proceedings of the Earth Resources and Environmental Remote Sensing/GIS Applications XI, Online, 21–25 September 2020; Volume 11534, pp. 171–180. [Google Scholar] [CrossRef]
- Bayik, C.; Abdikan, S.; Ozdemir, A.; Arıkan, M.; Balik Sanli, F.; Dogan, U. Investigation of the Landslides in Beylikdüzü-Esenyurt Districts of Istanbul from InSAR and GNSS Observations. Nat. Hazards 2021, 109, 1201–1220. [Google Scholar] [CrossRef]
- Lu, D.; Tan, J.; Cai, B.; Liu, J.; Wang, J. GNSS Signal in Railway Train Operation Scenario Quality Grid Generation Method. In Proceedings of the ION Pacific PNT—ION 2019 Pacific PNT Meeting, Honolulu, HI, USA, 8–11 April 2019; pp. 529–539. [Google Scholar] [CrossRef]
- Mi, L. Research on Construction of Urban Rail First-Order Control Network in Extra Large Area. Surv. Mapp. Geol. Miner. Resour. Surv. Mapp. Geol. Miner. Resour. 2013, 29, 8–10. [Google Scholar] [CrossRef]
- Guang, Y. High Precision First-Grade Control Network Survey for Guangzhou Rail Transit. Eng. Surv. Mapp. Eng. Surv. Mapp. 2012, 21, 82–85. [Google Scholar] [CrossRef]
- Peternel, T.; Janža, M.; Šegina, E.; Bezak, N.; Maček, M. Recognition of Landslide Triggering Mechanisms and Dynamics Using GNSS, UAV Photogrammetry and In Situ Monitoring Data. Remote Sens. 2022, 14, 3277. [Google Scholar] [CrossRef]
- Evers, M.; Kyriou, A.; Schulz, K.; Nikolakopoulos, K.G. A Study on Recent Ground Deformation near Patras, Greece. In Proceedings of the Earth Resources and Environmental Remote Sensing/GIS Applications X, Strasbourg, France, 10–12 September 2019; Volume 11560, pp. 108–119. [Google Scholar] [CrossRef]
- Gokceoglu, C.; Kocaman, S.; Nefeslioglu, H.A.; Ok, A.O. Use of Multisensor and Multitemporal Geospatial Datasets to Extract the Foundation Characteristics of a Large Building: A Case Study. Bull. Eng. Geol. Environ. 2021, 80, 3251–3269. [Google Scholar] [CrossRef]
- Chen, M.; Lv, P.; Nie, W.; Tan, C.; Bai, Z.; Liao, Y.; Zhou, J. The Role of Water and Lithology on the Deformation and Failure of an Anaclinal Rock Slope in a Hydropower Reservoir. Adv. Civ. Eng. 2020, 8852227. [Google Scholar] [CrossRef]
- Peng, Y.; Dong, D.; Chen, W.; Zhang, C. Stable Regional Reference Frame for Reclaimed Land Subsidence Study in East China. Remote Sens. 2022, 14, 3984. [Google Scholar] [CrossRef]
- Xiao, R.; Shi, H.; He, X.; Li, Z.; Jia, D.; Yang, Z. Deformation Monitoring of Reservoir Dams Using GNSS: An Application to South-to-North Water Diversion Project, China. IEEE Access 2019, 7, 54981–54992. [Google Scholar] [CrossRef]
- Zhu, S.; Zuo, X.; Shi, K.; Li, Y.; Guo, S.; Li, C. Surface Subsidence Monitoring in Kunming City with Time-Series InSAR and GNSS. Appl. Sci. 2022, 12, 12752. [Google Scholar] [CrossRef]
- Du, Q.; Li, G.; Zhou, Y.; Chai, M.; Chen, D.; Qi, S.; Wu, G. Deformation Monitoring in an Alpine Mining Area in the Tianshan Mountains Based on SBAS-InSAR Technology. Adv. Mater. Sci. Eng. 2021, 9988017. [Google Scholar] [CrossRef]
- Li, R.; Li, Z.; Han, J.; Lu, P.; Qiao, G.; Meng, X.; Hao, T.; Zhou, F. Monitoring Surface Deformation of Permafrost in Wudaoliang Region, Qinghai–Tibet Plateau with ENVISAT ASAR Data. Int. J. Appl. Earth Obs. Geoinf. 2021, 104, 102527. [Google Scholar] [CrossRef]
- Luo, L.; Ma, W.; Zhang, Z.; Zhuang, Y.; Yang, J.; Cao, X.; Liang, S.; Yi, S. Integration of Terrestrial Laser Scanning and Soil Sensors for Deformation and Hydrothermal Monitoring of Frost Mounds. Measurement 2019, 131, 513–523. [Google Scholar] [CrossRef]
- Palano, M.; Pezzo, G.; Serpelloni, E.; Devoti, R.; D’Agostino, N.; Gandolfi, S.; Sparacino, F.; Anderlini, L.; Poluzzi, L.; Tavasci, L.; et al. Geopositioning Time Series from Offshore Platforms in the Adriatic Sea. Sci. Data 2020, 7, 373. [Google Scholar] [CrossRef] [PubMed]
- Aytekin, G.; Topan, H.; Elkar, Y.E.; Kisi, M.; Erisik, O. 2D Orientation Accuracy of Güktürk-1 Panchromatic Imagery. In Proceedings of the 2019 9th International Conference on Recent Advances in Space Technologies (RAST 2019), Istanbul, Turkey, 11–14 June 2019; pp. 821–826. [Google Scholar] [CrossRef]
- Usmanov, B.M.; Gainullin, I.; Gafurov, A.M.; Rudenko, K.A.; Ivanov, M.A. Using Multitemporal Remote Sensing Data for Evaluation of the Kuibyshev Reservoir Bank Transformation (Laishevo and Ostolopovo Archaeological Sites, Tatarstan, Russia). In Proceedings of the Earth Resources and Environmental Remote Sensing/GIS Applications XII, Online, 13–17 September 2021; Volume 11863, pp. 100–110. [Google Scholar] [CrossRef]
- Vieira, G.; Mora, C.; Pina, P.; Ramalho, R.; Fernandes, R. UAV-Based Very High Resolution Point Cloud, Digital Surface Model and Orthomosaic of the Chã Das Caldeiras Lava Fields (Fogo, Cabo Verde). Earth Syst. Sci. Data 2021, 13, 3179–3201. [Google Scholar] [CrossRef]
- Shahmoradi, J.; Talebi, E.; Roghanchi, P.; Hassanalian, M. A Comprehensive Review of Applications of Drone Technology in the Mining Industry. Drones 2020, 4, 34. [Google Scholar] [CrossRef]
- Mainsant, G.; Larose, E.; Brönnimann, C.; Jongmans, D.; Michoud, C.; Jaboyedoff, M. Ambient Seismic Noise Monitoring of a Clay Landslide: Toward Failure Prediction. J. Geophys. Res. Earth Surf. 2012, 117, F1. [Google Scholar] [CrossRef]
- Moschas, F.; Psimoulis, P.A.; Stiros, S.C. GPS/RTS Data Fusion to Overcome Signal Deficiencies in Certain Bridge Dynamic Monitoring Projects. Smart Struct. Syst. 2013, 12, 251–269. [Google Scholar] [CrossRef]
- Penzias, A.A.; Wilson, R.W. A Measurement of Excess Antenna Temperature at 4080-Mc/s. Astrophys. J. 1965, 142, 419. [Google Scholar] [CrossRef]
- Blewitt, G. An Automatic Editing Algorithm for GPS Data. Geophys. Res. Lett. 1990, 17, 199–202. [Google Scholar] [CrossRef]
- Zhu, H.; Li, J.; Wang, C.; Xu, A.; Gao, M. A method of BeiDou navigation satellite system double difference network real-time kinematic. Sci. Surv. Mappin 2017, 42, 1–6. [Google Scholar] [CrossRef]
- Hu, G.; Cui, W. Observation Random Model of Precision Positioning with Combined GPS/GLONASS. J. Remote Sens. 2001, 5, 95–99. [Google Scholar]
- Xiong, C.; Lu, H.; Zhu, J.; Yu, J. Dynamic deformation monitoring of bridge structures based on GPS-RTK and accelerometers. J. Vib. Shock. 2019, 38, 69. [Google Scholar] [CrossRef]
- Smith, J.S. The Local Mean Decomposition and Its Application to EEG Perception Data. J. R. Soc. Interface 2005, 2, 443–454. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Jin, Y.; Zuo, M.J.; Feng, Z. Time-Frequency Representation Based on Robust Local Mean Decomposition for Multicomponent AM-FM Signal Analysis. Mech. Syst. Signal Process. 2017, 95, 468–487. [Google Scholar] [CrossRef]
- Cai, J.; Xiao, Y. Bearing Fault Diagnosis Method Based on the Generalized S Transform Time–Frequency Spectrum de-Noised by Singular Value Decomposition. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 2467–2477. [Google Scholar] [CrossRef]
- He, X.; Gao, Z.; Xiao, R.; Luo, H.; Jia, D.; Zhang, Z. Current status and outlook of the research on surface deformation monitoring by the integrated method of InSAR and Beidou/GNSS. J. Surv. Mapp. 2022, 51, 1338–1355. (In Chinese) [Google Scholar]
- Li, B.; Ge, Y. Single Epoch GPS Deformation Monitoring Data Processing and System Development. J. Henan Polytech. Univ. (Nat. Sci. Ed.). 2007, 26, 165–170. [Google Scholar] [CrossRef]
- Chen, X.; Yang, Y.; Zhou, C.; Liao, C. Study on Fast Positioning Algorithm for BeiDou Post-Mission Network RTK. IOP Conf. Ser. Mater. Sci. Eng. 2020, 780, 032051. [Google Scholar] [CrossRef]
- China Nonferrous Metals Industry Association (CNMIA). Ministry of Housing and Urban-Rural Development of the People’s Republic of China; General Administration of State Market Supervision and Administration; Engineering Measurement Standard; CNMIA: Beijing, China, 2020. [Google Scholar]
- Zhu, Y.; Shuang, M.; Sun, D.; Guo, H. Algorithm and Application of Foundation Displacement Monitoring of Railway Cable Bridges Based on Satellite Observation Data. Appl. Sci. 2023, 13, 2868. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ground Deformation Monitoring along Subway Line | ||||||
|---|---|---|---|---|---|---|
| Measurement Point | Horizontal Displacement | Vertical Displacement | ||||
| Cumulative Displacement (mm) | Cumulative Horizontal Displacement (mm) | Cumulative Displacement Rate (mm/d) | Cumulative Settlement (mm) | Cumulative Settlement Rate (mm/d) | ||
| Δx | Δy | ΔHr | ΔHr/d | Δh | Δh/d | |
| BDT1 | −2.7 | 1.0 | 2.9 | 0.09 | −5.1 | −0.15 |
| BDT2 | No data | No data | No data | No data | No data | No data |
| BDT3 | −1.0 | 0 | 1.0 | 0.03 | −4.8 | −0.14 |
| BDT4 | −1.5 | 0.9 | 1.7 | 0.05 | −3.2 | −0.09 |
| BDT5 | −1.1 | 0.4 | 1.2 | 0.04 | −3.0 | −0.09 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, D.; Li, A.; Ji, B.; Duan, J.; Tao, Y.; Luo, H. Ground Deformation Monitoring for Subway Structure Safety Based on GNSS. Buildings 2023, 13, 2682. https://doi.org/10.3390/buildings13112682
Tan D, Li A, Ji B, Duan J, Tao Y, Luo H. Ground Deformation Monitoring for Subway Structure Safety Based on GNSS. Buildings. 2023; 13(11):2682. https://doi.org/10.3390/buildings13112682
Chicago/Turabian StyleTan, Dongmei, An Li, Baifeng Ji, Jiayi Duan, Yu Tao, and Hao Luo. 2023. "Ground Deformation Monitoring for Subway Structure Safety Based on GNSS" Buildings 13, no. 11: 2682. https://doi.org/10.3390/buildings13112682