
Research on Parametric Vibration of a Steel Truss Corridor under Pedestrians Excitation Considering the Time-Delay Effect
 and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Nonlinear Parametric Vibration Model for the STC
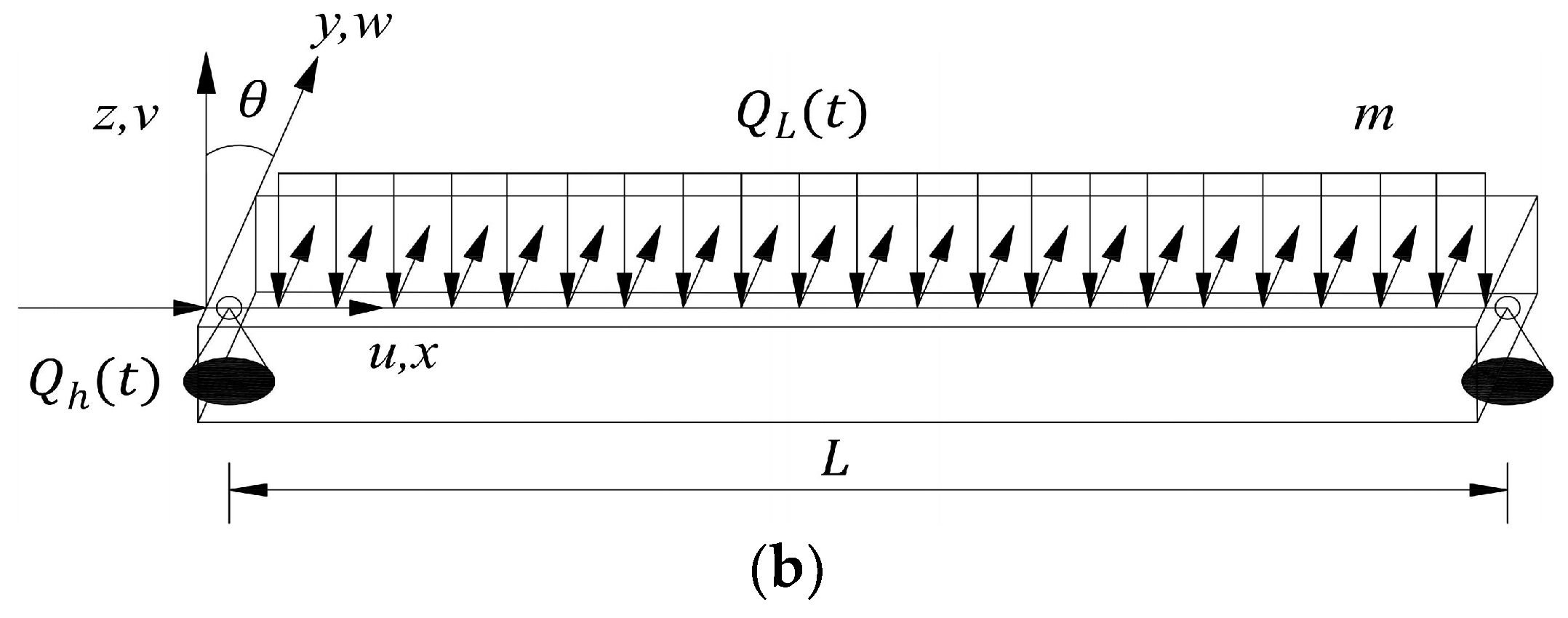
2.1. Basic Assumptions
- (1)
- The number of pedestrians is considered to be evenly distributed along the span of the STC.
- (2)
- We ignore the effect of the pedestrians’ forward direction on the three-way walking force.
- (3)
- The STC modeling obeys the Euler–Bernoulli beams’ assumption.
- (4)
- We ignore the effect of the pedestrians’ damping.
2.2. Dynamic Equilibrium Equations for STCs
3. Parametric Vibration Equations for STC Taking into Account Time-Delay Effects
3.1. Solution of Dynamically Unstable Regions Considering Time-Delay Effects
3.2. Nonlinear Dynamic Response Solution Considering the Time-Delay Effect
4. Numerical Analysis of the Millennium STC Parametric Vibration Considering Time-Delay Effect
4.1. Calculation Parameters Related to the Midspan of the Millennium Bridge
4.2. Time-Delay Effects on the Dynamic Instability Region in the Midspan of the Millennium STC
4.3. Effect of Time-Delay Effect on the Nonlinear Dynamic Response of the Midspan of the Millennium STC
4.3.1. Stable Region
4.3.2. Critical Region
4.3.3. Regions of Instability
4.4. Analysis of the Impact of Time-Delay Effect on the Midspan of the Millennium STC
5. Conclusions
- (1)
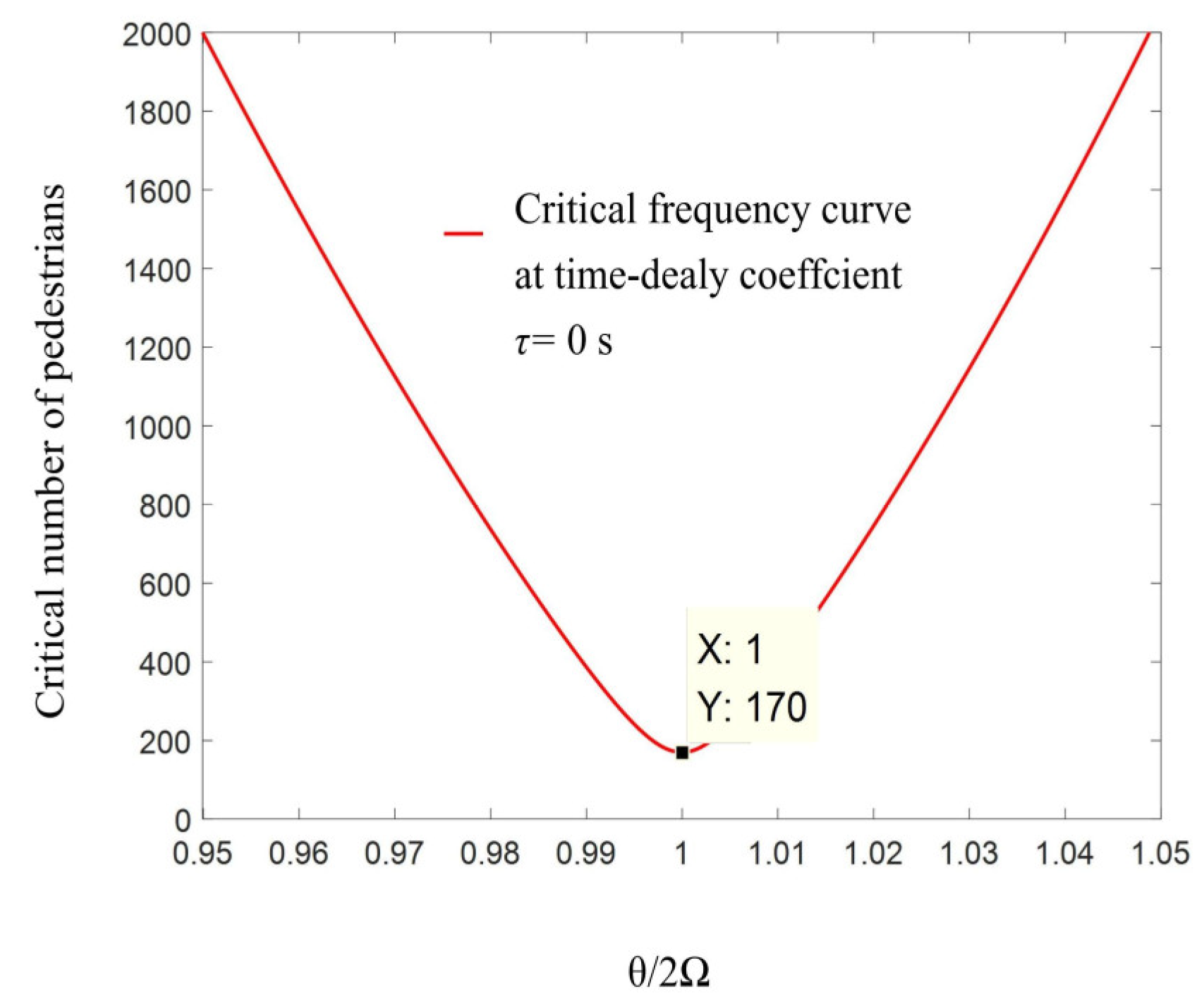
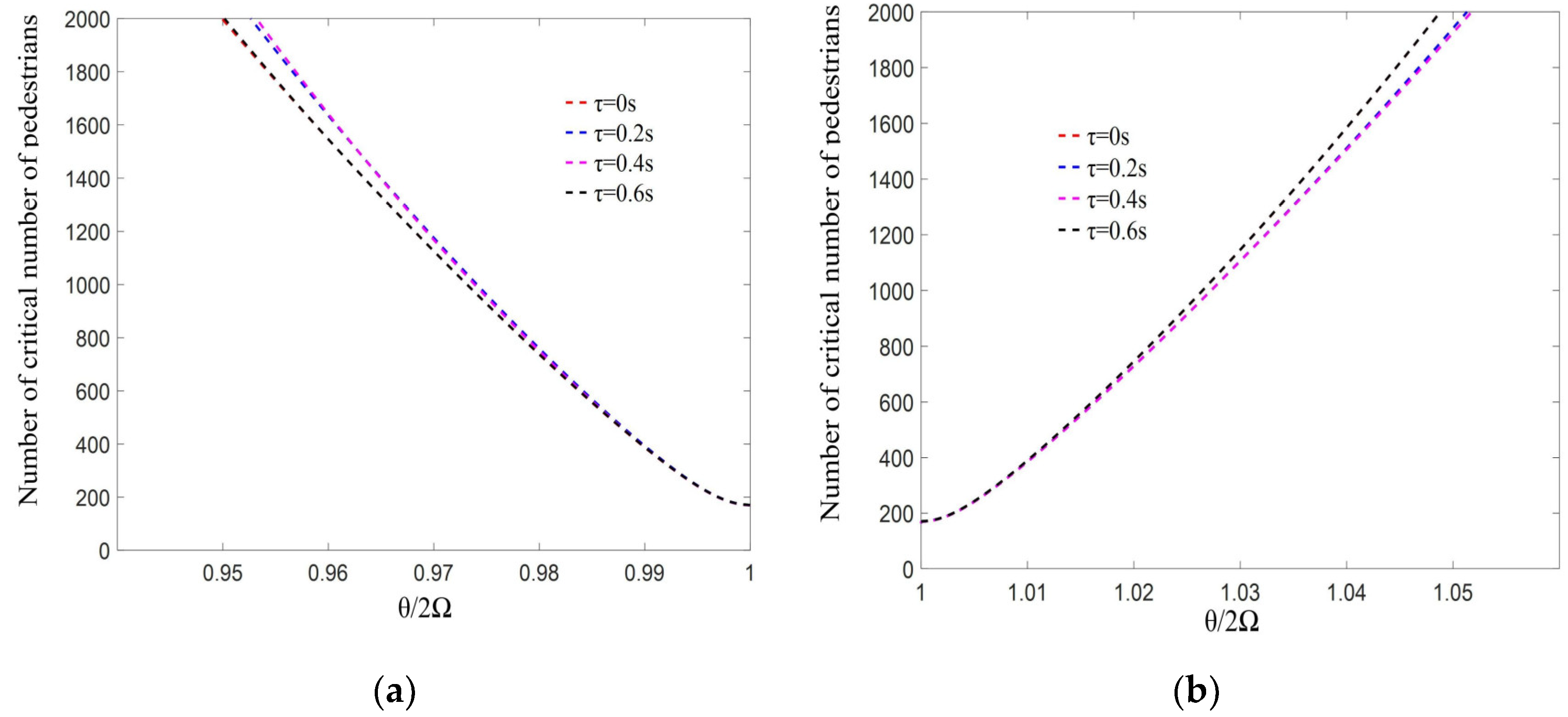
- When there is a time-delay effect, the frequency ratio θ/2Ω = 1, the regional boundary size, shape and rotation center of its dynamic stability do not change, and the value of the time-delay coefficient has no effect on the critical number of pedestrians on the STC in the parametric resonance region. As the frequency ratio θ/2Ω gradually moves away from 1, the time-delay effect slightly affects the value of the critical number of pedestrians, and the effect becomes more significant as the frequency ratio θ/2Ω is farther away from 1.
- (2)
- For STC in nonparametric resonance regions, the time-delay coefficient will affect the lateral dynamic stability of the STC. When the STC begins to excite the parametric resonance phenomenon, the existence of the time-delay effect will change the time for the STC to reach a stable amplitude, and the existence of a suitable time-delay value on the STC can suppress the lateral vibration of the STC. When the STC generates severe parametric vibration, the value of the time-delay coefficient will not affect the nonlinear dynamic response of the STC.
- (3)
- As a dynamic control parameter, the time-delay coefficient will affect the complex dynamic behavior of the parametric vibration of the STC. For STC in the non-parametric resonance region and critical region, there is a pair of staggered critical bifurcation time-delay coefficients, and the number of pedestrians N on different STC corresponds to different critical time-delay values τ1 and τ2, and different time-delay coefficients will change the vibration response of the midspan of the Millennium STC; the instant time-delay effect causes the pedestrian bridge to cross between a steady state and an unstable state.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dey, P.; Narasimhan, S.; Walbridge, S. Reliability-based assessment and calibration of standards for the lateral vibration of pedestrians bridges. Eng. Struct. 2021, 239, 112–271. [Google Scholar] [CrossRef]
- Peng, J.L.; Luo, X.Q.; Zhang, Q.L. Analysis and control of human-induced vibration response of a STC supported by an arch cable. Build. Struct. 2017, 47, 569–573. [Google Scholar]
- Casciati, F.; Casciati, S.; Faravelli, L. A contribution to the modelling of human induced excitation on pedestrians bridges. Struct. Saf. 2017, 66, 51–61. [Google Scholar] [CrossRef]
- Song, Z.G.; Huan, Y. Estimating the critical number of lateral vibrations of STC structures using the social force model. J. Vib. Eng. 2014, 27, 233–237. [Google Scholar]
- Wang, D.Y.; Wu, C.Q.; Zhang, Y.S.; Li, S.W. Study on vertical vibration control of long-span steel footbridge with tuned mass dampers under pedestrians excitation. J. Constr. Steel Res. 2019, 154, 84–98. [Google Scholar] [CrossRef]
- Qin, J.W. Human-structure interaction is based on a bipedal walking model. Beijing Jiaotong Univ. 2013, 07, 150. [Google Scholar]
- Luongo, A.; Piccardo, G. Linear instability mechanisms for coupled translational galloping. J. Sound Vib. 2005, 288, 1027–1047. [Google Scholar] [CrossRef] [Green Version]
- Firus, A.; Kemmler, R.; Berthold, H.; Lorenzen, S.; Schneider, J. A time domain method for reconstruction of pedestrians induced loads on vibrating structures. Mech. Syst. Signal Process. 2022, 171, 108–887. [Google Scholar] [CrossRef]
- Bassoli, E.; Gambarelli, P.; Vincenzi, L. Human-induced vibrations of a curved cable-stayed footbridge. J. Constr. Steel Res. 2018, 146, 84–96. [Google Scholar] [CrossRef]
- Venuti, F.; Bruno, L. Mitigating human-induced lateral vibrations on footbridges through walkway shaping. Eng. Struct. 2013, 56, 95–104. [Google Scholar] [CrossRef] [Green Version]
- Jia, B.Y.; Yan, Q.S.; Yu, X.L. Stability analysis of pedestrian-induced large lateral vibration on a footbridge. Eng. Mech. 2019, 36, 155–164. [Google Scholar] [CrossRef]
- Piccardo, G.; Tubino, F. Parametric resonance of flexible footbridges under crowd-induced lateral excitation. J. Sound Vib. 2008, 311, 353–371. [Google Scholar] [CrossRef]
- Xia, Y.; Fujino, Y. Auto-parametric vibration of a cable-stayed-beam structure under random excitation. J. Eng. Mech. 2006, 132, 279–286. [Google Scholar] [CrossRef]
- Wei, X.X.; Peter, V.D.B.; Guido, D.R.; Katrien, V.N. A simplified method to account for the effect of human-human interaction on the pedestrians-induced vibrations of footbridges. Procedia Eng. 2017, 199, 2907–2912. [Google Scholar] [CrossRef]
- Gabriella, M.M.; Lai, E.; Giulia, L. Coupled Analysis of STC-pedestrians dynamic interaction. Eng. Struct. 2018, 176, 127–142. [Google Scholar]
- Lu, D. Response Analysis and Vibration Assessment of Tibetan Ancient Structures under Crowd Loading; Beijing Jiaotong University: Beijing, China, 2017. [Google Scholar]
- Hu, H.Y. Applied Nonlinear Dynamics; Aviation Industry Press: Shanghai, China, 2000. [Google Scholar]
- Dillard, P.; Fitzpatrick, T.; Flint, A. London Millennium Brigde: Pedestrians-induced Lateral Vibration. J. Bridge Eng. 2001, 06, 412–417. [Google Scholar] [CrossRef]
- Bolotin, V.V. The Dynamic Stability of Elastic Systems; Aerospace Corp el: Segundo, CA, USA, 1962. [Google Scholar]
- Meyer, R.B.K.R. Theory and Applications of Hopf Bifurcation. Siam Rev. 2006, 24, 498–499. [Google Scholar] [CrossRef]
- Zhou, C.; Yan, Q.S.; Deng, D.Y.; Chen, Y.J.; Jia, B.Y.; Yu, X.L. Study on nonlinear lateral parametric vibration of footbridges under crowd excitation. Vib. Shock 2018, 37, 47–51. [Google Scholar]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Wen, J.; Deng, D.; Dai, W.; Chen, S.; Lu, H.; Liu, L. Research on Parametric Vibration of a Steel Truss Corridor under Pedestrians Excitation Considering the Time-Delay Effect. Buildings 2023, 13, 98. https://doi.org/10.3390/buildings13010098
Chen Z, Wen J, Deng D, Dai W, Chen S, Lu H, Liu L. Research on Parametric Vibration of a Steel Truss Corridor under Pedestrians Excitation Considering the Time-Delay Effect. Buildings. 2023; 13(1):98. https://doi.org/10.3390/buildings13010098
Chicago/Turabian StyleChen, Zhou, Jiahao Wen, Deyuan Deng, Wei Dai, Siyuan Chen, Hanwen Lu, and Lingfei Liu. 2023. "Research on Parametric Vibration of a Steel Truss Corridor under Pedestrians Excitation Considering the Time-Delay Effect" Buildings 13, no. 1: 98. https://doi.org/10.3390/buildings13010098