
Assessment of a Full-Scale Unreinforced Stone Masonry Building Tested on a Shaking Table by Inverse Engineering


Abstract
:1. Introduction
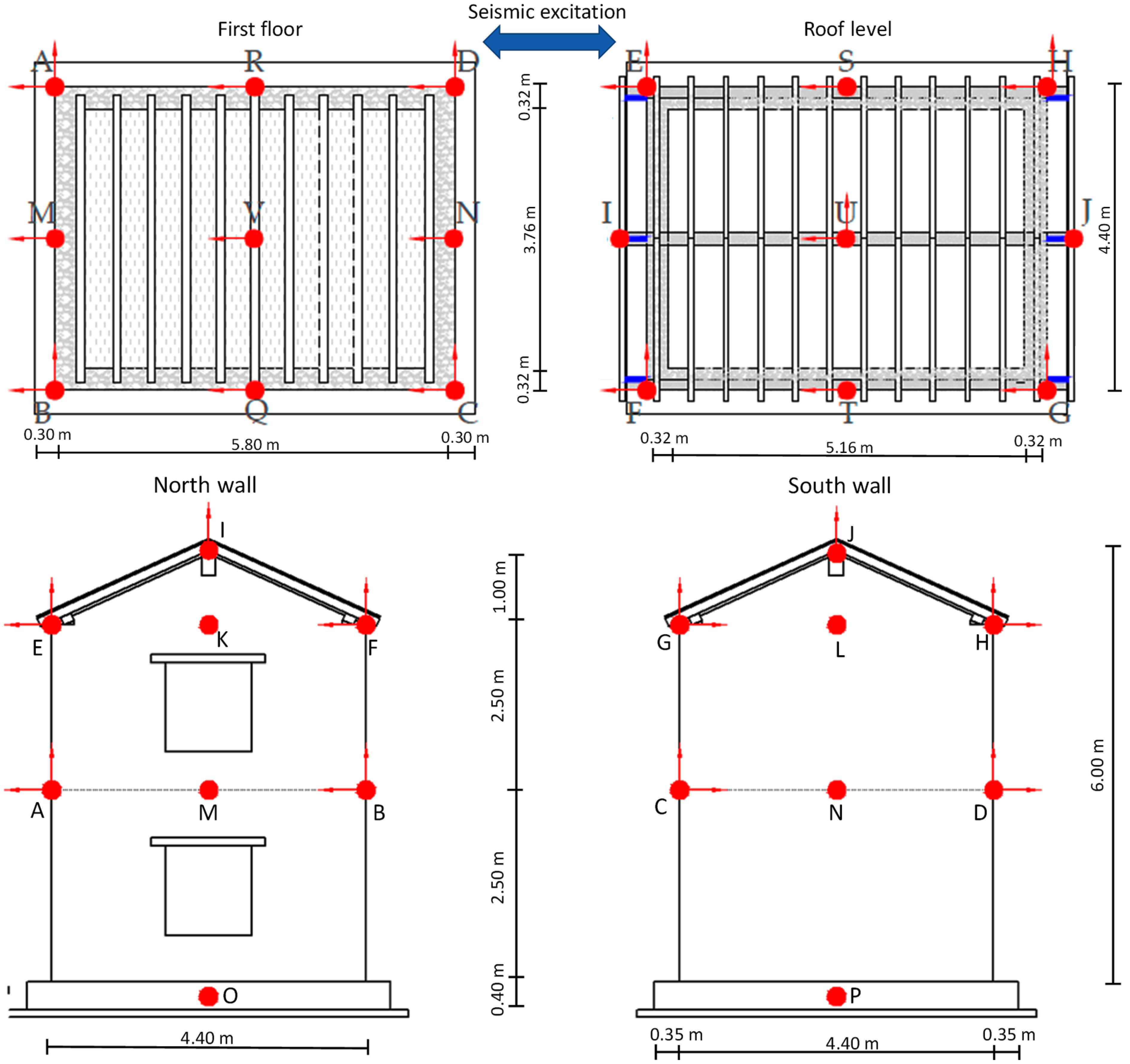
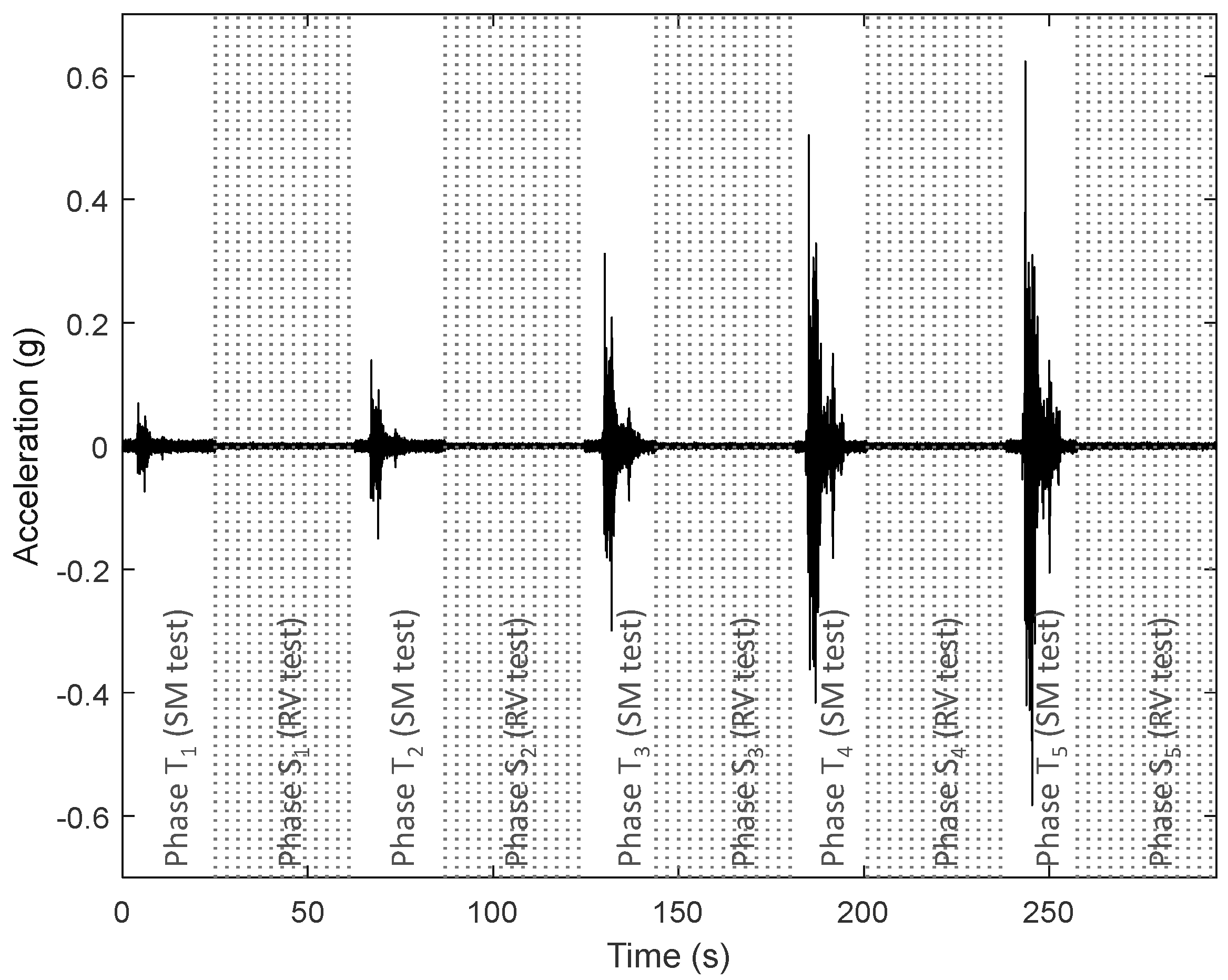
2. Brief Description of the Shaking Table Test Procedure and Response of the Building
3. State-Space Model of the Acceleration Measurements
4. FEM Calibration
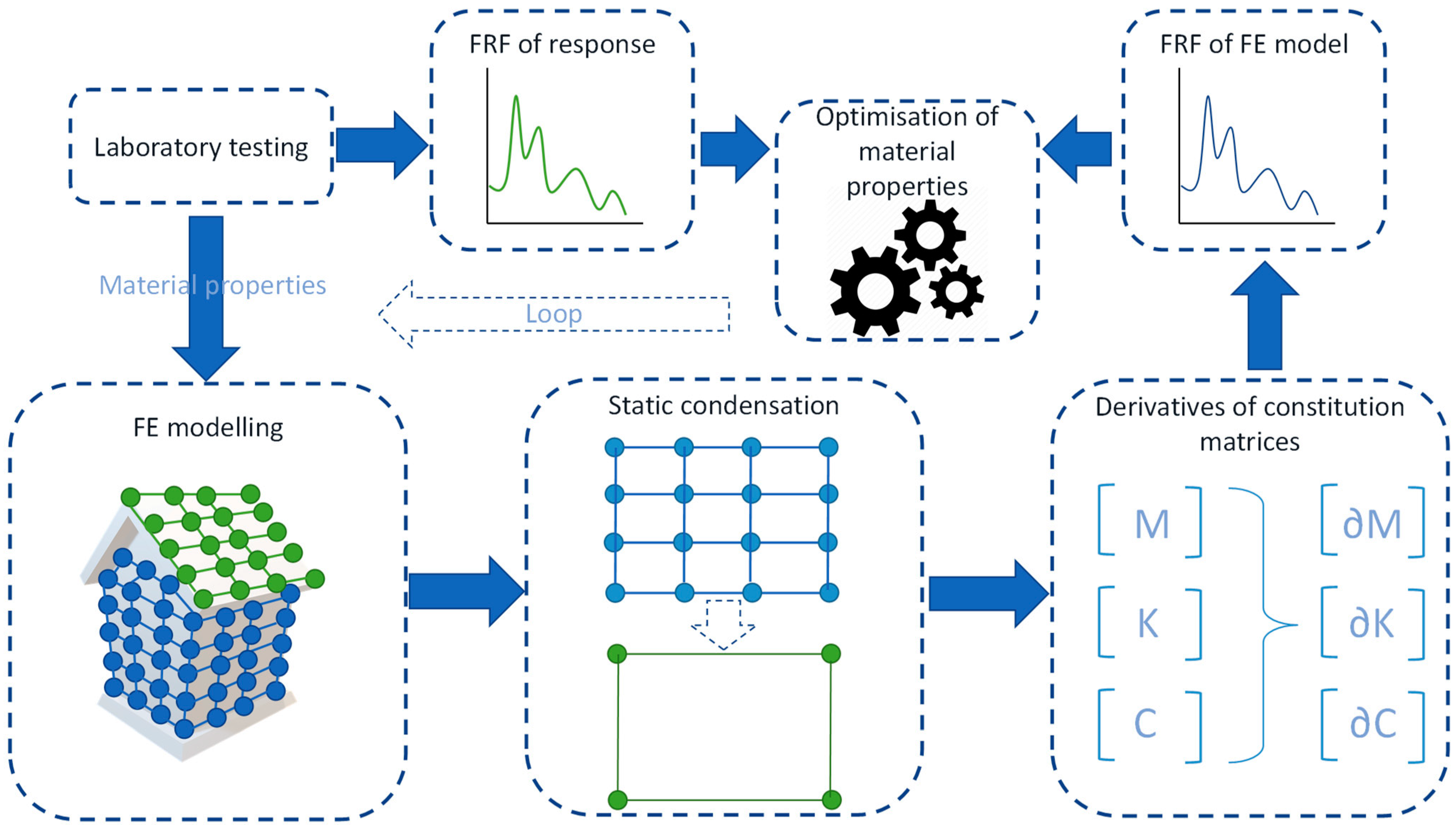
4.1. Overview of the Calibration Procedure
- Step 1: from the laboratory testing, the material properties and the frequency response functions (FRF’s) of the structure are obtained.
- Step 2: an FE model of the structure is built based on the previously found material properties.
- Step 3: static condensation is performed to reduce the degrees of freedom (DOFs) of the model.
- Step 4: the derivatives of the constitution matrices of the model (M mass, K stiffness and C damping) are estimated.
- Step 5: using the data from steps 2 to 4, the FRF’s are estimated.
- Step 6: FRF’s from steps 1 and 6 are compared and new material properties are estimated.
- Step 7: the optimisation procedure returns to step 2 until the comparison shows an acceptable convergence.
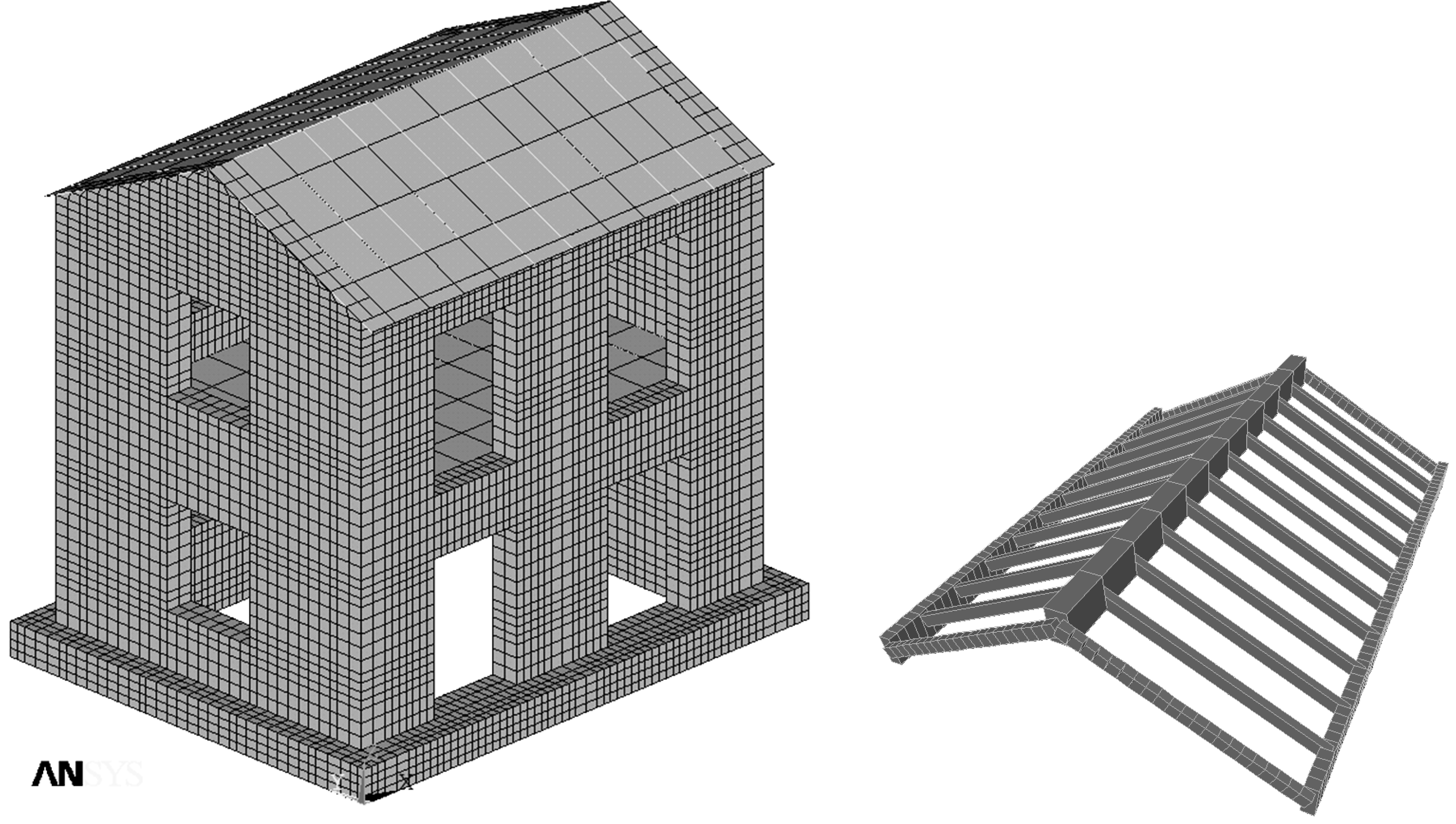
4.2. Set-Up of the FE Model and Calibration Parameters
- Eight-node solid elements (SOLID185) with three translational DOFs in each node to simulate the concrete base of the structure and the masonry walls. Shell elements with rotational DOFs could be used alternatively but they can simulate the connections with timber less accurately.
- Four-node shell elements (SHELL63) with two in-plane translational DOFs in each node to simulate the timber floor diaphragm and the timber roof diaphragm.
- Two-node beam elements (BEAM4) with six DOFs (translational and rotational) in each node to simulate the timber beams of the floor and the roof.
4.3. Static Condensation of the FE Model
4.4. Estimation of the Derivatives of the FE Matrices
4.5. Estimation of the Frequency Response Function of the FE Model
4.6. Estimation of Deviation between FE Model and Recording Response
4.7. Iterative Method for Solving the Calibration Set of Equations
5. Calibrated Model
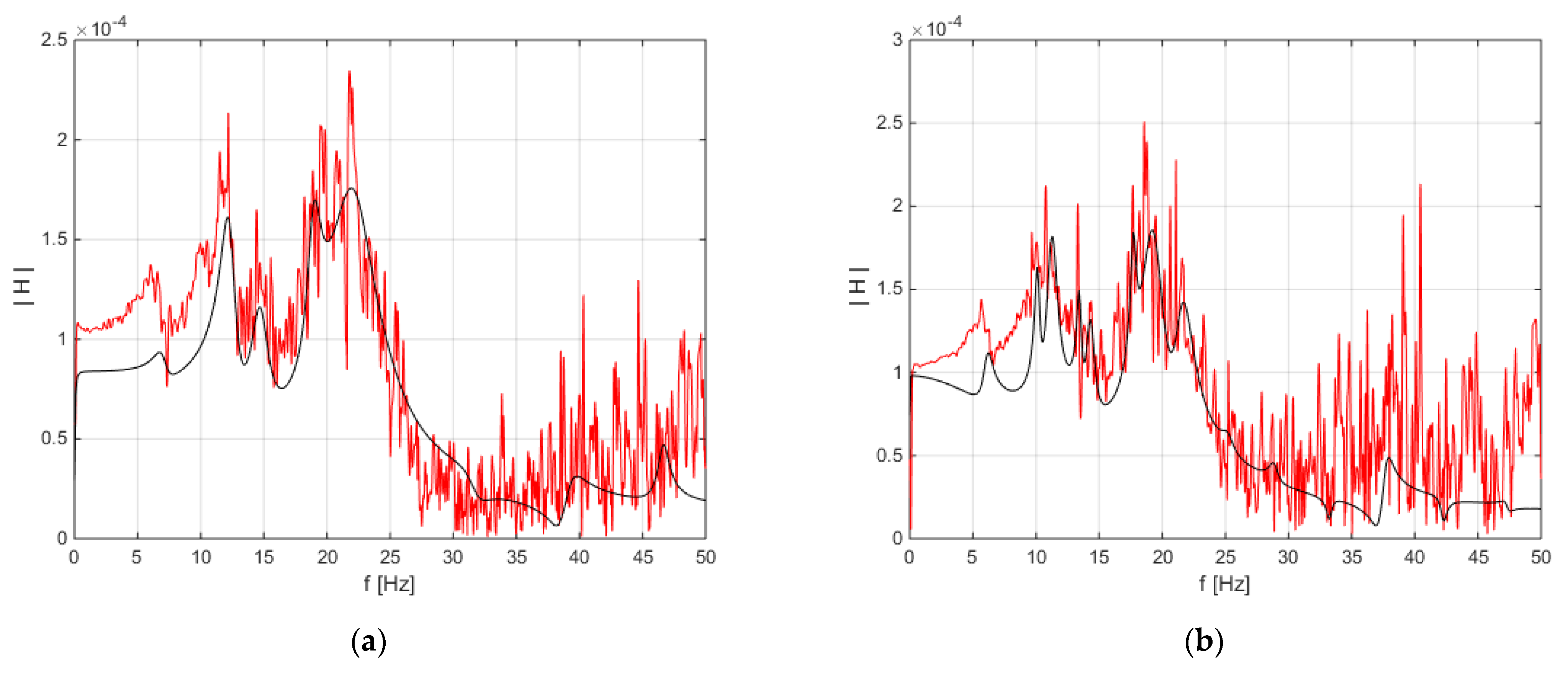
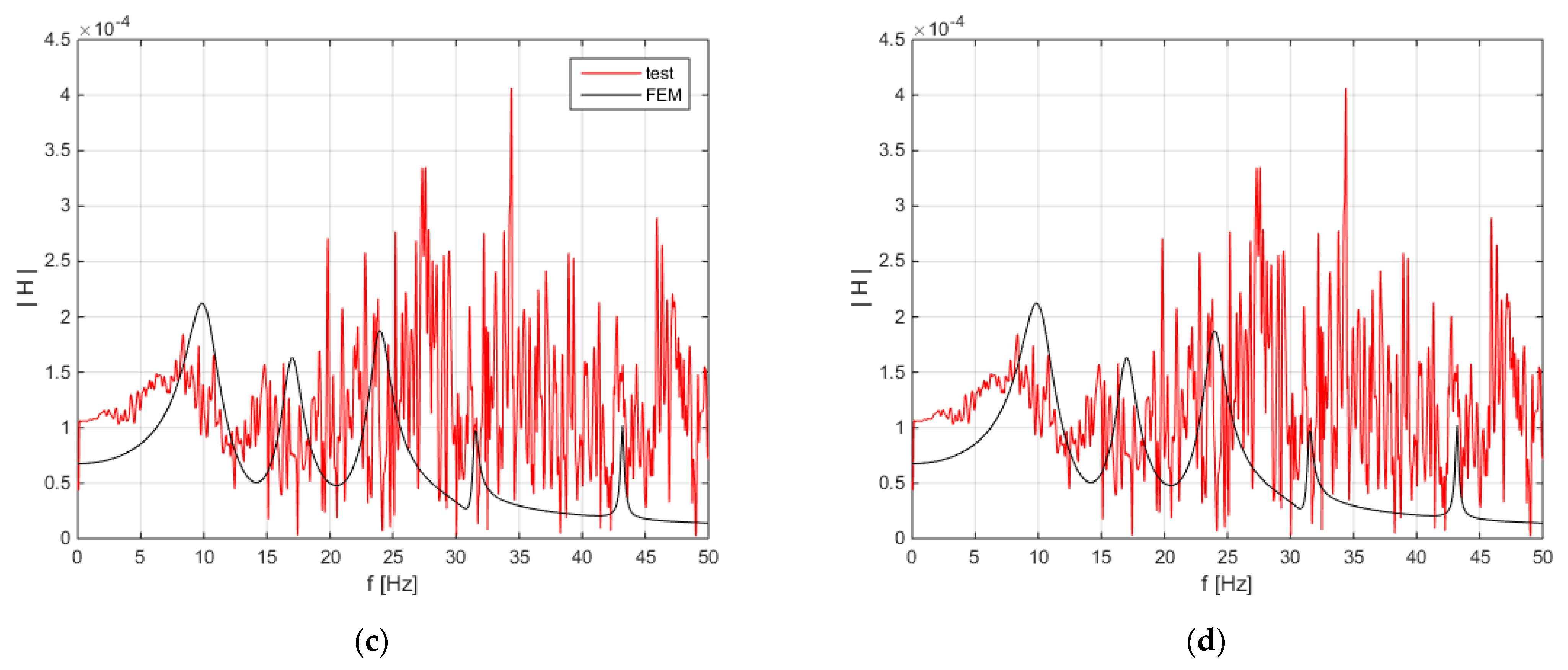
5.1. Calibrated Frequency Response
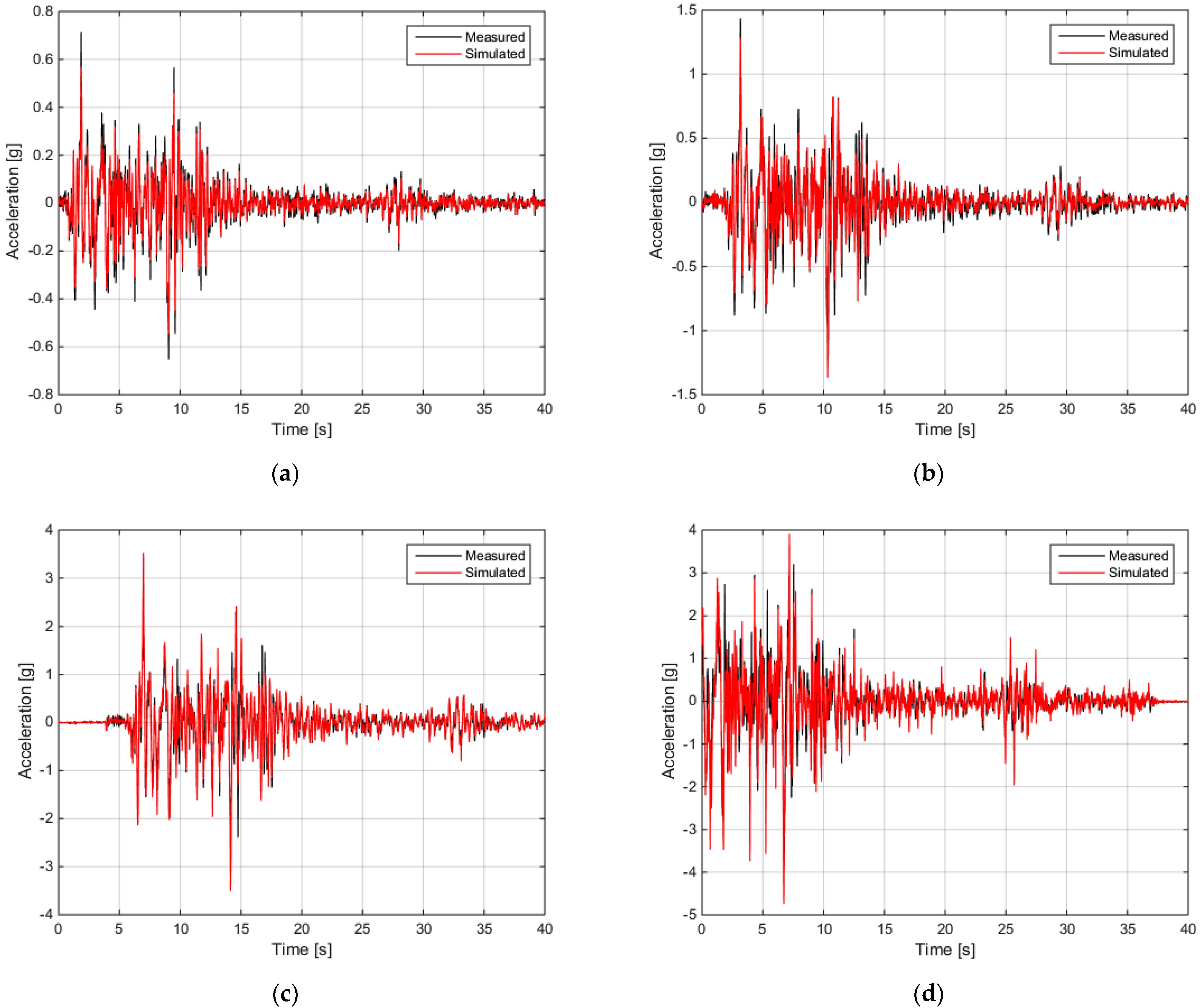
5.2. Calibrated Acceleration Response
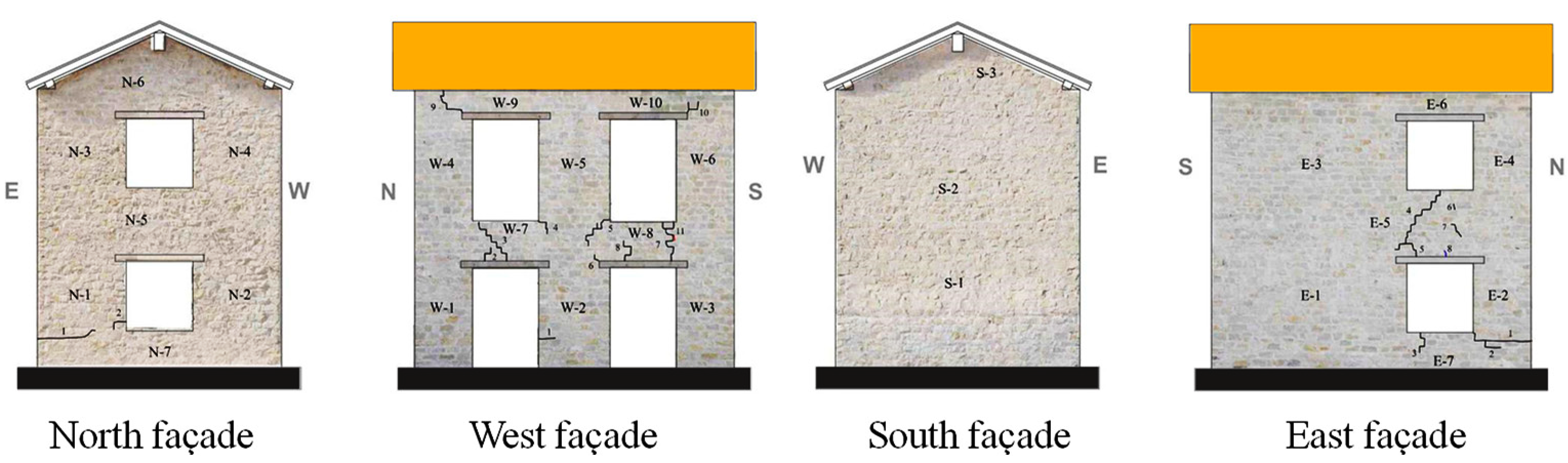
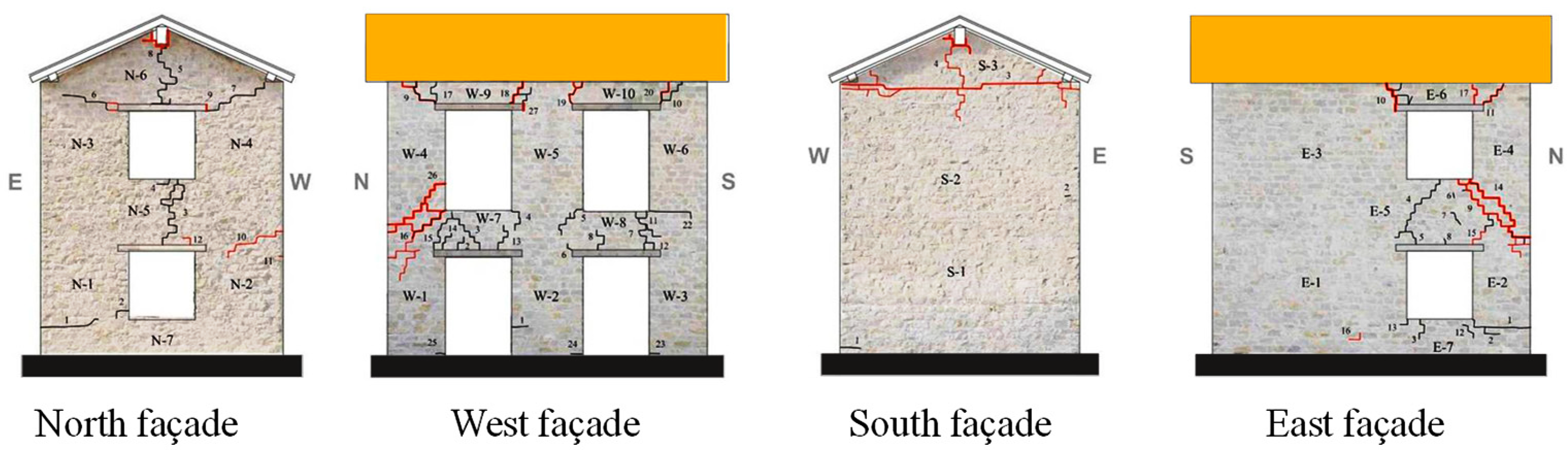
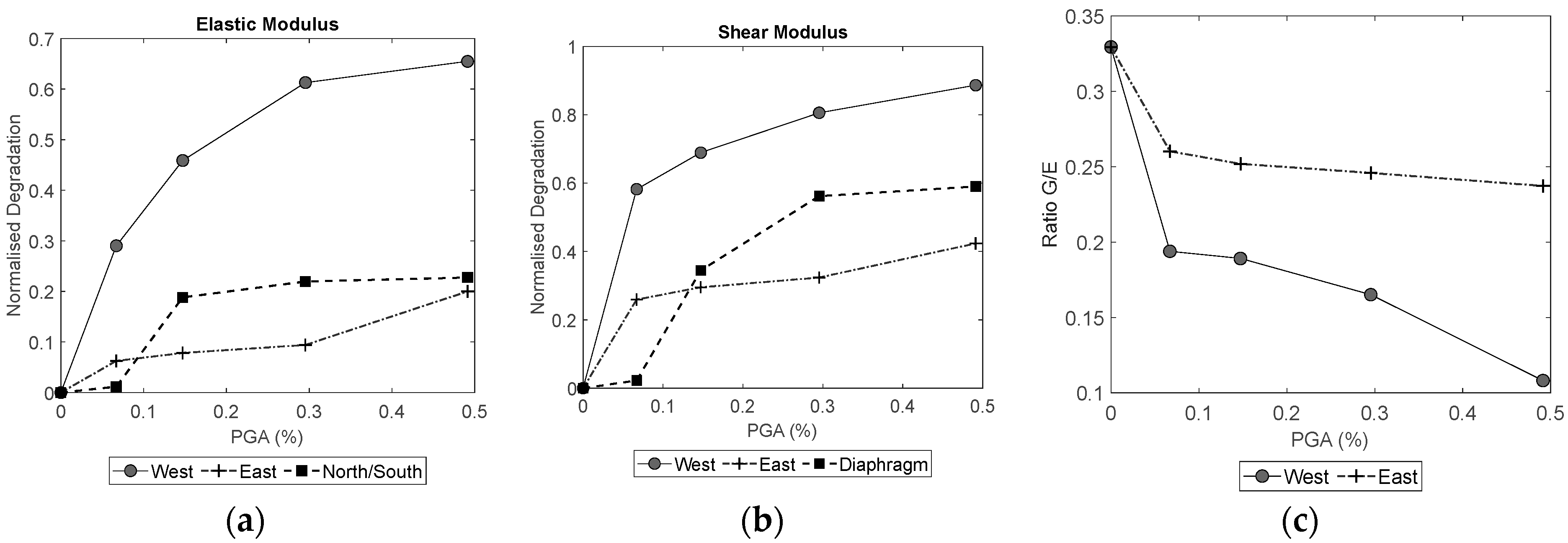
5.3. Mechanical Deterioration
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Aras, F.; Krstevska, L.; Altay, G.; Tashkov, L. Experimental and numerical modal analyses of a historical masonry palace. Constr. Build. Mater. 2011, 25, 81–91. [Google Scholar] [CrossRef]
- Krstevska, L.; Tashkov, L.; Gocevski, V.; Garevski, M. Experimental and analytical investigation of seismic stability of masonry walls at Beauharnois powerhouse. Bull. Earthq. Eng. 2009, 8, 421–450. [Google Scholar] [CrossRef]
- Kerschen, G.; Worden, K.; Vakakis, A.F.; Golinval, J.-C. Past, present and future of nonlinear system identification in structural dynamics. Mech. Syst. Signal Process. 2006, 20, 505–592. [Google Scholar] [CrossRef]
- Doebling, S.W. Structural dynamics model validation: Pushing the envelope. In Proceedings of the International Conference on Structural Dynamics Modelling: Test, Analysis, Correlation and Validation, Madeira, Portugal, 3–5 June 2002. [Google Scholar]
- Allemang, R.J.; Brown, D.L. A correlation coefficient for modal vector analysis. In Proceedings of the First International Modal Analysis Conference; Union Coll: Orlando, FL, USA, 1982; pp. 110–116. [Google Scholar]
- Lourenço, P.B.; Trujillo, A.; Mendes, N.; Ramos, L.F. Seismic performance of the St. George of the Latins church: Lessons learned from studying masonry ruins. Eng. Struct. 2012, 40, 501–518. [Google Scholar] [CrossRef]
- Aguilar, R.; Marques, R.; Sovero, K.; Martel, C.; Trujillano, F.; Boroschek, R. Investigations on the structural behaviour of archaeological heritage in Peru: From survey to seismic assessment. Eng. Struct. 2015, 95, 94–111. [Google Scholar] [CrossRef]
- Abrahamsson, T.S.; Kammer, D. FEM Calibration with FRF Damping Equalization. In Model Validation and Uncertainty Quantification; Atamturktur, H.S., Moaveni, B., Papadimitriou, C., Schoenherr, T., Eds.; Conference Proceedings of the Society for Experimental Mechanics Series; Springer: Cham, Switzerland, 2014; Volume 3, pp. 265–278. ISBN 978-3-319-04551-1. [Google Scholar]
- Abrahamsson, T.J.S.; Kammer, D.C. Finite element model calibration using frequency responses with damping equalization. Mech. Syst. Signal Process. 2015, 62–63, 218–234. [Google Scholar] [CrossRef]
- Van Overschee, P.; De Moor, B. N4SID: Subspace algorithms for the identification of combined deterministic-stochastic systems. Automatica 1994, 30, 75–93. [Google Scholar] [CrossRef]
- Ljung, L.; McKelvey, T. Subspace identification from closed loop data. Signal Process. 1996, 52, 209–215. [Google Scholar] [CrossRef]
- Peeters, B.; De Roeck, G. Reference-Based Stochastic Subspace Identification for Output-Only Modal Analysis. Mech. Syst. Signal Process. 1999, 13, 855–878. [Google Scholar] [CrossRef]
- Deraemaeker, A.; Reynders, E.; De Roeck, G.; Kullaa, J. Vibration-based structural health monitoring using output-only measurements under changing environment. Mech. Syst. Signal Process. 2008, 22, 34–56. [Google Scholar] [CrossRef]
- Juang, J.-N.; Phan, M.Q.; Dewell, L. Identification and Control of Mechanical Systems; Cambridge University Press: Cambridge, UK, 2004; Volume 55, ISBN 0-521-78355-0. [Google Scholar]
- Hoshiya, M.; Saito, E. Structural Identification by Extended Kalman Filter. J. Eng. Mech. 1984, 110, 1757–1770. [Google Scholar] [CrossRef]
- Juang, J.-N.; Pappa, R.S. An eigensystem realization algorithm for modal parameter identification and model reduction. J. Guid. Control. Dyn. 1985, 8, 620–627. [Google Scholar] [CrossRef]
- Hu, S.-L.J.; Yang, W.-L.; Liu, F.-S.; Li, H.-J. Fundamental comparison of time-domain experimental modal analysis methods based on high- and first-order matrix models. J. Sound Vib. 2014, 333, 6869–6884. [Google Scholar] [CrossRef]
- Indirli, M.; Kouris, L.A.S.; Formisano, A.; Borg, R.P.; Mazzolani, F.M. Seismic Damage Assessment of Unreinforced Masonry Structures After The Abruzzo 2009 Earthquake: The Case Study of the Historical Centers of L’Aquila and Castelvecchio Subequo. Int. J. Archit. Herit. 2013, 7, 536–578. [Google Scholar] [CrossRef]
- Kouris, L.A.S.; Borg, R.P.; Indirli, M. The L’Aquila Earthquake, April 6th, 2009: A review of seismic damage mechanisms. In Proceedings of the COST ACTION C26 “Urban Habitat Constructions under Catastrophic Events”, Final Conference, Naples, Italy, 16–19 September 2010; Mazzolani, F.M., Ed.; Taylor & Francis Group: London, UK, 2010; pp. 673–681. [Google Scholar]
- Magenes, G.; Penna, A.; Galasco, A. A full-scale shaking table test on a two-storey stone masonry building. In Proceedings of the 14th European Conference on Earthquake Engineering, Ohrid, Republic of Macedonia, 30 August–3 September 2010. [Google Scholar]
- Kouris, L.A.S.; Penna, A.; Magenes, G. Seismic damage diagnosis of a masonry building using short-term damping measurements. J. Sound Vib. 2017, 394, 366–391. [Google Scholar] [CrossRef]
- Kouris, L.A.S. Dynamic Identification and Assessment of the Response of a Full Scale Unreinforced Masonry Building Tested on Shaking Table. Ph.D. Thesis, Istituto Universitario di Studi Superiori di Pavia, Pavia, Italy, 2015. [Google Scholar]
- Kouris, L.A.S.; Penna, A.; Magenes, G. Dynamic Modification and Damage Propagation of a Two-Storey Full-Scale Masonry Building. Adv. Civ. Eng. 2019, 2019, 2396452. [Google Scholar] [CrossRef]
- Aloisio, A.; Antonacci, E.; Fragiacomo, M.; Alaggio, R. The Recorded Seismic Response of the Santa Maria Di Collemaggio Basilica to Low-intensity Earthquakes. Int. J. Archit. Herit. 2021, 15, 229–247. [Google Scholar] [CrossRef]
- Lorenzoni, F.; Casarin, F.; Caldon, M.; Islami, K.; Modena, C. Uncertainty quantification in structural health monitoring: Applications on cultural heritage buildings. Mech. Syst. Signal Process. 2016, 66–67, 268–281. [Google Scholar] [CrossRef]
- Kouris, L.A.S.L.; Penna, A.; Magenes, G. Damage detection of an unreinforced stone masonry two storeys building based on damping estimate. In Brick and Block Masonry; CRC Press: Boca Raton, FL, USA, 2016; pp. 2425–2432. ISBN 978-1-138-02999-6. [Google Scholar]
- Chrysostomou, C.Z.; Kyriakides, N.; Kappos, A.J.; Kouris, L.; Georgiou, E.; Millis, M. Seismic retrofitting and health monitoring of school buildings of Cyprus. Open Constr. Build. Technol. J. 2013, 7, 208–220. [Google Scholar] [CrossRef]
- Magenes, G.; Penna, A.; Rota, M.; Galasco, A.; Senaldi, I. Verifica Numerico-Sperimentale Delle Indicazioni Relative ad Edifici Esistenti in Muratura Presenti Nell’ordinanza PCM 3274 Del 20/03/2003 e s.m.i.; EUCENTRE: Pavia, Italy, 2010. [Google Scholar]
- Kouris, E.-G. Dynamic Characteristics and Rocking Response of a Byzantine Medieval Tower. J. Civ. Eng. Sci. 2017, 6, 14–23. [Google Scholar] [CrossRef]
- Kouris, E.-G.S.; Kouris, L.-A.S.; Konstantinidis, A.A.; Kourkoulis, S.K.; Karayannis, C.G.; Aifantis, E.C. Stochastic Dynamic Analysis of Cultural Heritage Towers up to Collapse. Building 2021, 11, 296. [Google Scholar] [CrossRef]
- Kouris, E.-G.; Kouris, L.-A.S.; Konstantinidis, A.A.; Karayannis, C.G.; Aifantis, E.C. Assessment and Fragility of Byzantine Unreinforced Masonry Towers. Infrastructures 2021, 6, 40. [Google Scholar] [CrossRef]
- Lenzen, A.; Waller, H. Damage detection by system identification. An application of the generalized singular value decomposition. Arch. Appl. Mech. 1996, 66, 555–568. [Google Scholar] [CrossRef]
- Golub, G.H.; Reinsch, C. Singular value decomposition and least squares solutions. Numer. Math. 1970, 14, 403–420. [Google Scholar] [CrossRef]
- De Callafon, R.A.; Moaveni, B.; Conte, J.P.; He, X.; Udd, E. General Realization Algorithm for Modal Identification of Linear Dynamic Systems. J. Eng. Mech. 2008, 134, 712–722. [Google Scholar] [CrossRef]
- De Angelis, M.; Luş, H.; Betti, R.; Longman, R.W. Extracting Physical Parameters of Mechanical Models From Identified State-Space Representations. J. Appl. Mech. 2002, 69, 617. [Google Scholar] [CrossRef]
- Lardies, J. Modal parameter identification based on ARMAV and state–space approaches. Arch. Appl. Mech. 2009, 80, 335–352. [Google Scholar] [CrossRef]
- Reynders, E. System Identification Methods for (Operational) Modal Analysis: Review and Comparison. Arch. Comput. Methods Eng. 2012, 19, 51–124. [Google Scholar] [CrossRef]
- Aloisio, A.; Pelliciari, M.; Bergami, A.V.; Alaggio, R.; Briseghella, B.; Fragiacomo, M. Effect of pinching on structural resilience: Performance of reinforced concrete and timber structures under repeated cycles. Struct. Infrastruct. Eng. 2022, 1–17. [Google Scholar] [CrossRef]
- Kouris, L.A.S.; Bournas, D.A.; Akintayo, O.T.; Konstantinidis, A.A.; Aifantis, E.C. A gradient elastic homogenisation model for brick masonry. Eng. Struct. 2020, 208, 110311. [Google Scholar] [CrossRef]
- Kržan, M.; Bosiljkov, V. In-plane seismic behaviour of ashlar three-leaf stone masonry walls: Verifying performance limits. Int. J. Archit. Herit. 2021, 1–14. [Google Scholar] [CrossRef]
- Di Nino, S.; Zulli, D. Homogenization of Ancient Masonry Buildings: A Case Study. Appl. Sci. 2020, 10, 6687. [Google Scholar] [CrossRef]
- Wilding, B.V.; Godio, M.; Beyer, K. The ratio of shear to elastic modulus of in-plane loaded masonry. Mater. Struct. 2020, 53, 40. [Google Scholar] [CrossRef] [PubMed]
- Tomaževič, M. Shear resistance of masonry walls and Eurocode 6: Shear versus tensile strength of masonry. Mater. Struct. Constr. 2009, 42, 889–907. [Google Scholar] [CrossRef]
- Croce, P.; Beconcini, M.L.; Formichi, P.; Cioni, P.; Landi, F.; Mochi, C.; De Lellis, F.; Mariotti, E.; Serra, I. Shear modulus of masonry walls: A critical review. Procedia Struct. Integr. 2018, 11, 339–346. [Google Scholar] [CrossRef]
- Cluni, F.; Gusella, V. Homogenization of non-periodic masonry structures. Int. J. Solids Struct. 2004, 41, 1911–1923. [Google Scholar] [CrossRef]
- Magenes, G.; Penna, A.; Galasco, A.; Rota, M. Experimental characterisation of stone masonry mechanical properties. In Proceedings of the 8th International Masonry Conference, Dresden, Germany, 4–7 July 2010; pp. 1–10. [Google Scholar]
- Manual, A.U. Revision 13.0; Swanson Analysis System Inc.: Houston, PA, USA, 2011. [Google Scholar]
- Magenes, G.; Galasco, A.; Penna, A.; Paré, M.; Da; DaParé, M. In-plane cyclic shear tests of undressed double leaf stone masonry panels. In Proceedings of the 8th International Masonry Conference, Dresden, Germany, 4–7 July 2010. [Google Scholar]
- CEN. Eurocode 6: Design of Masonry Structures; Part 1: General Rules for Buildings; European Union: Brussels, Belgium, 2004; Volume 1. [Google Scholar]
- Paz, M.; Leigh, W. Integrated Matrix Analysis of Structures; Springer: Boston, MA, USA, 2001; ISBN 978-1-4613-5640-0. [Google Scholar]
- Ridders, C.J.F. Accurate computation of F′(x) and F′(x) F″(x). Adv. Eng. Softw. 1982, 4, 75–76. [Google Scholar] [CrossRef]
- Ditommaso, R.; Ponzo, F.C.; Auletta, G. Damage detection on framed structures: Modal curvature evaluation using Stockwell Transform under seismic excitation. Earthq. Eng. Eng. Vib. 2015, 14, 265–274. [Google Scholar] [CrossRef]
- Matlab Documentation. Matlab R2012b. 2012. Available online: https://www.mathworks.com/help/matlab/ (accessed on 7 August 2022).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| E1 | E2 | E3 | G1 | G2 | G3 | |
|---|---|---|---|---|---|---|
| West wall | P1 | 0.8P1 | 0.8P1 | P2 | P2 | P2 |
| East wall | P3 | 0.8P3 | 0.8P3 | P4 | P4 | P4 |
| North wall | P5 | 0.8P5 | 0.8P5 | 0.33P5 | 0.33P5 | 0.33P5 |
| South wall | P5 | 0.8P5 | 0.8P5 | 0.33P5 | 0.33P5 | 0.33P5 |
| Diaphragm | - | - | - | P6 | P6 | P6 |
| fm | E | ft | G | |
|---|---|---|---|---|
| Mean | 3.28 | 2550 | 0.137 | 840 |
| St. Dev. | 0.26 | 345 | 0.031 | 125 |
| c.o.v. | 8% | 13.50% | 21.80% | 14.80% |
| Member | Modulus | Initial | Phase 1 | Phase 2 | Phase 3 | Phase 4 |
|---|---|---|---|---|---|---|
| East wall | E | 2.55 | 1.81 | 1.38 | 0.99 | 0.88 |
| G | 0.84 | 0.35 | 0.26 | 0.16 | 0.10 | |
| West wall | E | 2.55 | 2.39 | 2.35 | 2.31 | 2.04 |
| G | 0.84 | 0.62 | 0.59 | 0.57 | 0.48 | |
| OOP walls | E | 2.55 | 2.52 | 2.07 | 1.99 | 1.97 |
| Diaphragm | G | 0.35 | 0.35 | 0.23 | 0.16 | 0.14 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kouris, L.A.S.; Penna, A.; Magenes, G. Assessment of a Full-Scale Unreinforced Stone Masonry Building Tested on a Shaking Table by Inverse Engineering. Buildings 2022, 12, 1235. https://doi.org/10.3390/buildings12081235
Kouris LAS, Penna A, Magenes G. Assessment of a Full-Scale Unreinforced Stone Masonry Building Tested on a Shaking Table by Inverse Engineering. Buildings. 2022; 12(8):1235. https://doi.org/10.3390/buildings12081235
Chicago/Turabian StyleKouris, Leonidas Alexandros S., Andrea Penna, and Guido Magenes. 2022. "Assessment of a Full-Scale Unreinforced Stone Masonry Building Tested on a Shaking Table by Inverse Engineering" Buildings 12, no. 8: 1235. https://doi.org/10.3390/buildings12081235