
Parameter Optimization and Application for the Inerter-Based Tuned Type Dynamic Vibration Absorbers

Abstract
:1. Introduction
2. Model Establishment and Parameter Optimization
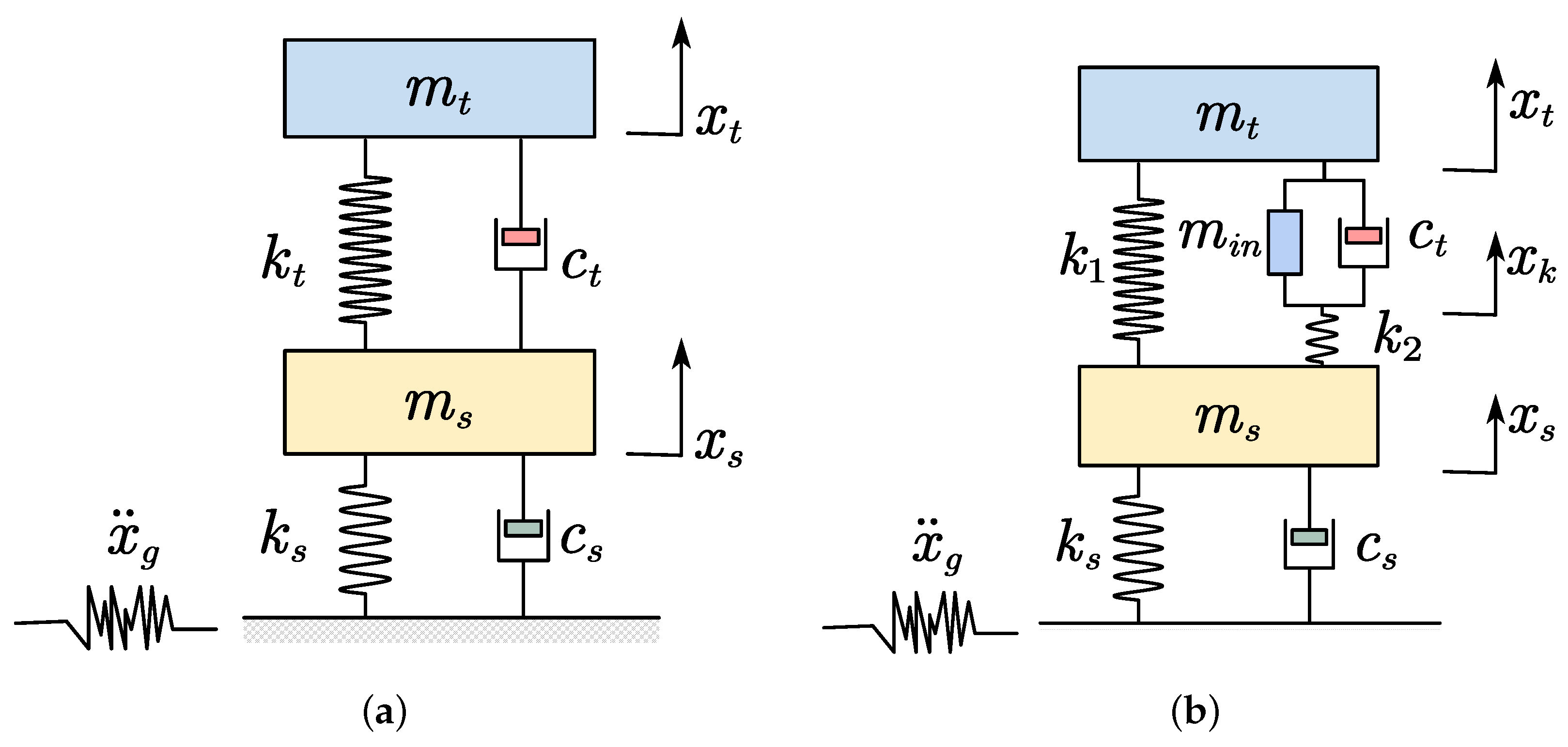
2.1. Numerical Model of SDOF System
2.2. Parameters Optimization
2.3. Performance Comparison
3. Case Study 1—A SDOF Oscillator
3.1. Parameters of SDOF Structure
3.2. Reaction of the Primary Structure
3.3. Stroke of Damping elements
3.4. Energy Dissipation
4. Case Study 2– A MDOF Benchmark Model
4.1. Introduction of Model
4.2. External Loads Acting on the Structure
4.3. Dynamic Modal Establishment for Passive Control
4.4. Active Control with Multiple DVAs
5. Verification for Vibration Suppression
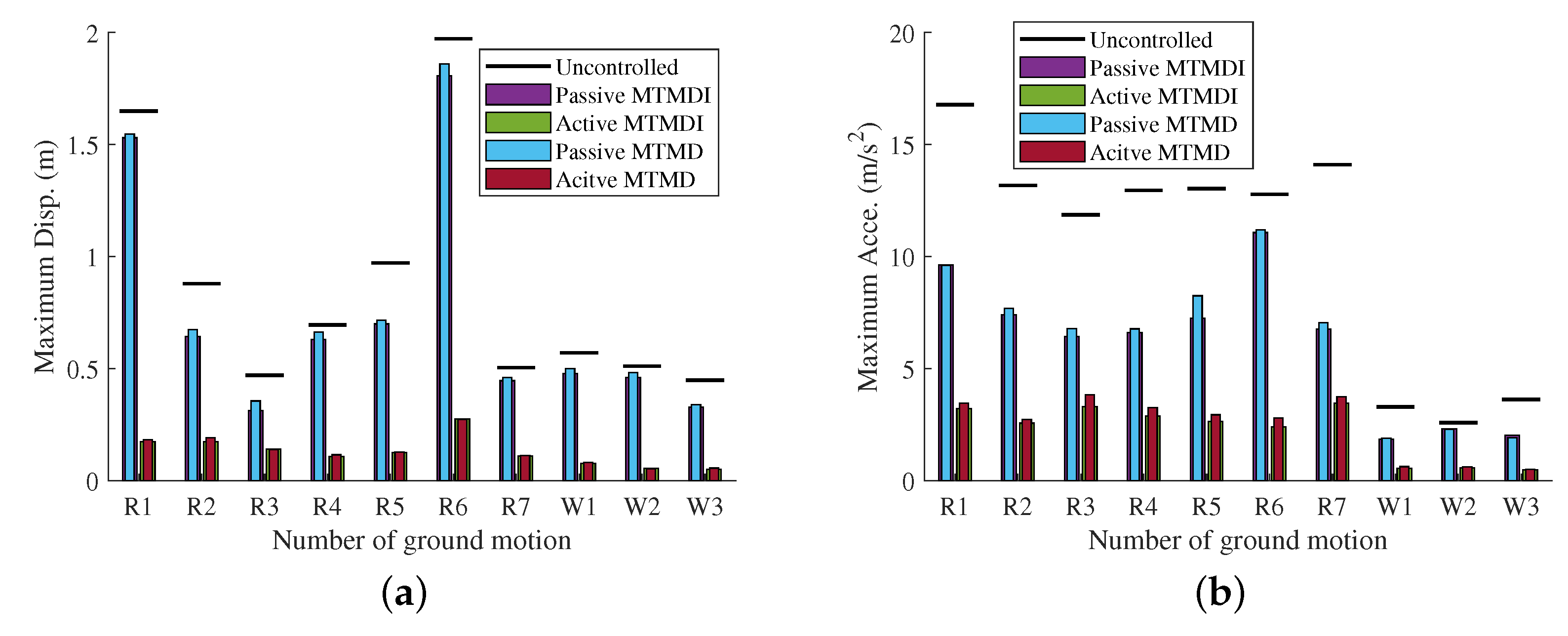
5.1. The Top Response of This Building
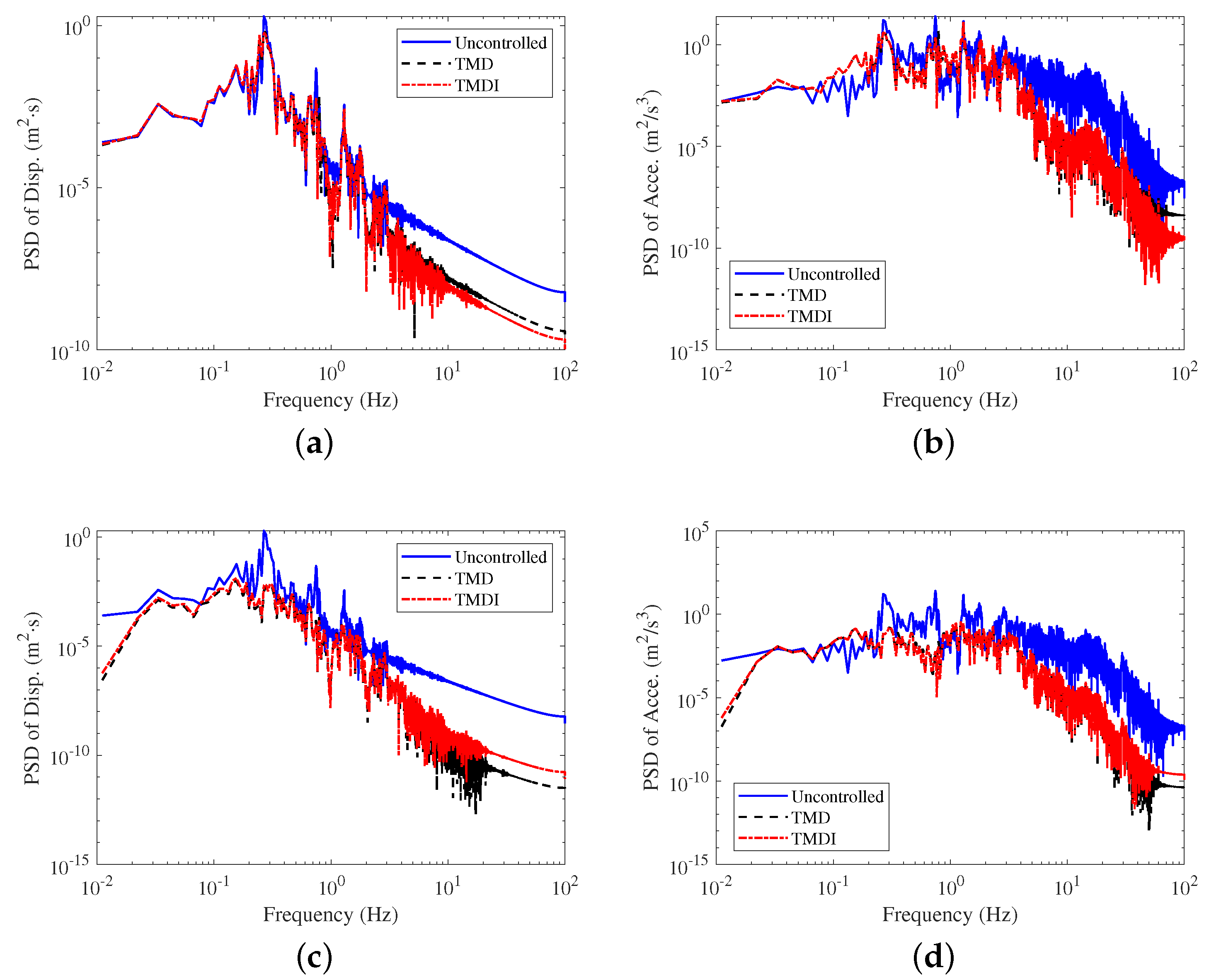
5.2. Statistical Characteristics of the Response
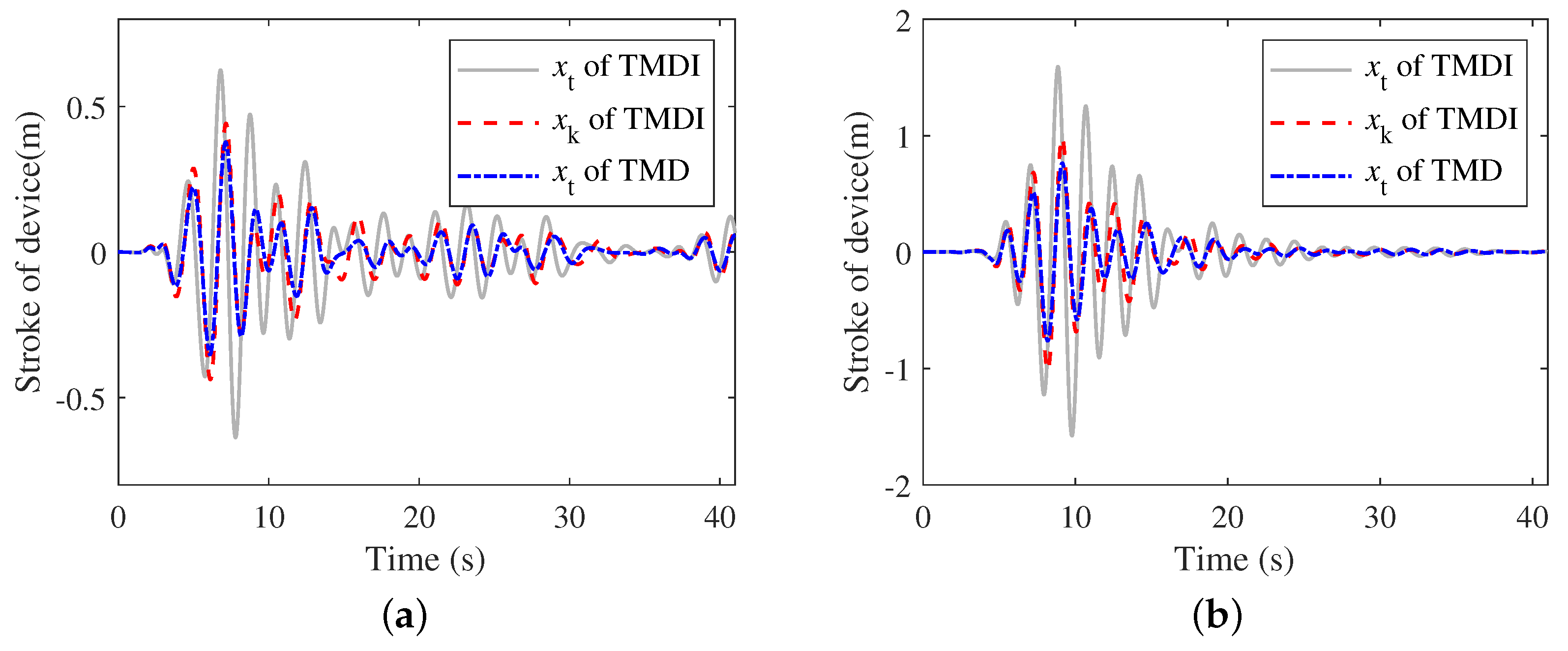
5.3. Stroke of the Devices
6. Conclusions
- 1.
- The deficiency of classical fixed-point theory can be compensated by employing numerical searching, and the optimal design parameters of TMD and TMDI under external excitation can be effectively found.
- 2.
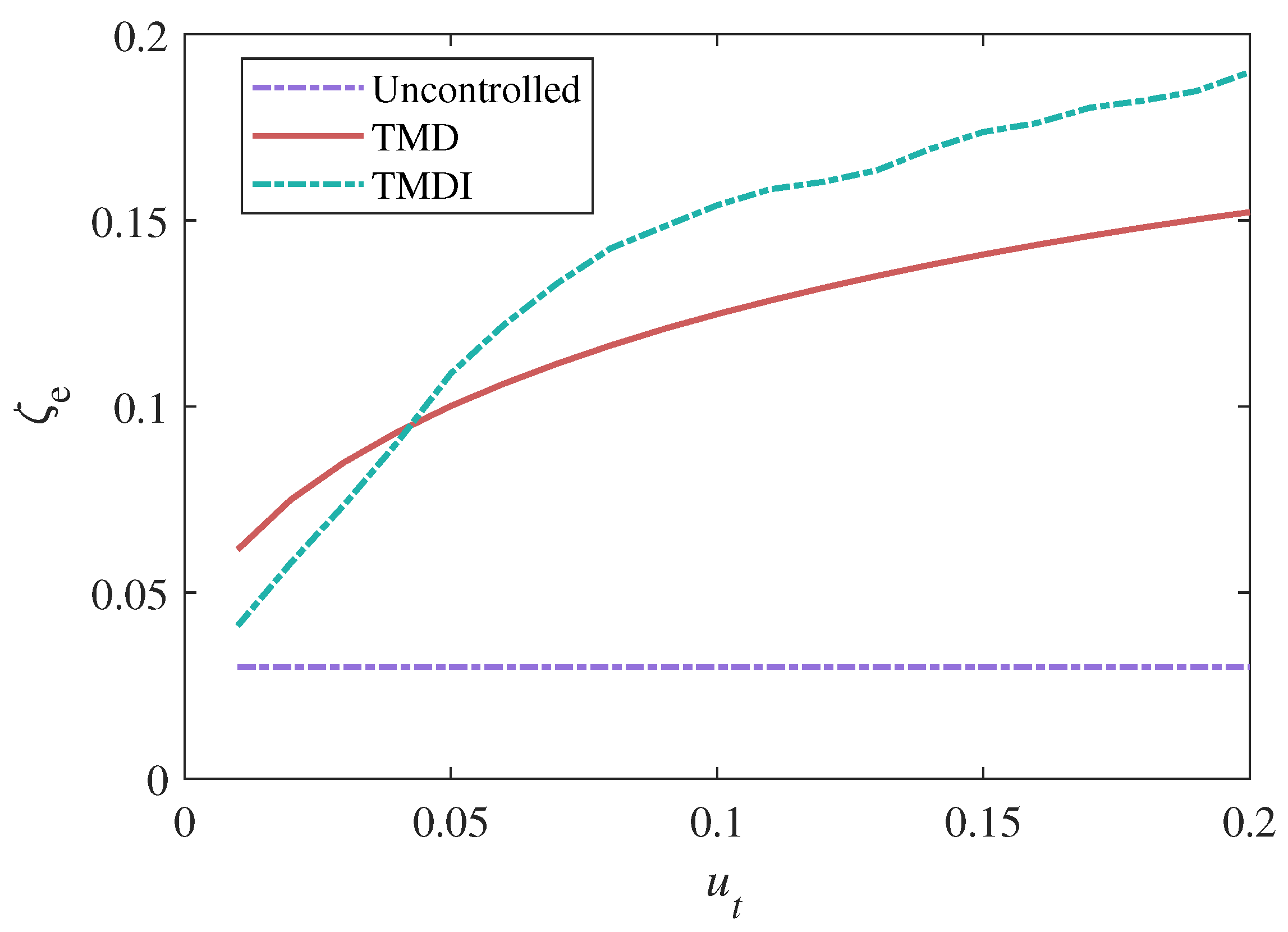
- The TMDI performs better than the classical TMD, with the lower amplitude of the transfer function for the primary system. Meanwhile, the TMDI can provide more extra additional damping to the structure and increase the overall system energy dissipation, but the stroke has to be increased.
- 3.
- With the contribution of extra actuators, the multiple active TMDI could greatly alleviate the response of the structure and stroke of attached DVAs. Besides, it also has the strength of being insensitive to structural and environmental changes, with stronger robustness and stability.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ismail, M. Seismic isolation of structures. Part I: Concept, review and a recent development. Hormigón Acero 2018, 69, 147–161. [Google Scholar] [CrossRef]
- Zhou, Y.; Shao, H.; Cao, Y.; Lui, E.M. Application of buckling-restrained braces to earthquake-resistant design of buildings: A review. Eng. Struct. 2021, 246, 112991. [Google Scholar] [CrossRef]
- De Domenico, D.; Ricciardi, G.; Takewaki, I. Design strategies of viscous dampers for seismic protection of building structures: A review. Soil Dyn. Earthq. Eng. 2019, 118, 144–165. [Google Scholar] [CrossRef]
- Elias, S.; Matsagar, V. Research developments in vibration control of structures using passive tuned mass dampers. Annu. Rev. Control 2017, 44, 129–156. [Google Scholar] [CrossRef]
- Haskett, T.; Breukelman, B.; Robinson, J.; Kottelenberg, J. Tuned Mass Dampers under Excessive Structural Excitation; Report; Motioneering Inc.: Guelph, ON, Canada, 2004. [Google Scholar]
- McNamara, R.J. Tuned mass dampers for buildings. J. Struct. Div. 1977, 103, 1785–1798. [Google Scholar] [CrossRef]
- Kwok, K.C. Damping increase in building with tuned mass damper. J. Eng. Mech. 1984, 110, 1645–1649. [Google Scholar] [CrossRef]
- Lu, X.; Chen, J. Parameter optimization and structural design of tuned mass damper for Shanghai centre tower. Struct. Des. Tall Spec. Build. 2011, 20, 453–471. [Google Scholar] [CrossRef]
- Yang, F.; Sedaghati, R.; Esmailzadeh, E. Vibration suppression of structures using tuned mass damper technology: A state-of-the-art review. J. Vib. Control 2021, 28, 812–836. [Google Scholar] [CrossRef]
- Rahimi, F.; Aghayari, R.; Samali, B. Application of tuned mass dampers for structural vibration control: A state-of-the-art review. Civ. Eng. J. 2020, 6, 1622–1651. [Google Scholar] [CrossRef]
- Den Hartog, J.P. Mechanical Vibrations; Courier Corporation: North Chelmsford, MA, USA, 1985. [Google Scholar]
- Warburton, G.B. Optimum absorber parameters for various combinations of response and excitation parameters. Earthq. Eng. Struct. Dyn. 1982, 10, 381–401. [Google Scholar] [CrossRef]
- Asami, T.; Nishihara, O.; Baz, A.M. Analytical solutions to H∞ and H2 optimization of dynamic vibration absorbers attached to damped linear systems. J. Vib. Acoust. 2002, 124, 284–295. [Google Scholar] [CrossRef]
- Hoang, N.; Warnitchai, P. Design of multiple tuned mass dampers by using a numerical optimizer. Earthq. Eng. Struct. Dyn. 2005, 34, 125–144. [Google Scholar] [CrossRef]
- Nishihara, O.; Asami, T. Closed-form solutions to the exact optimizations of dynamic vibration absorbers (minimizations of the maximum amplitude magnification factors). J. Vib. Acoust. 2002, 124, 576–582. [Google Scholar] [CrossRef]
- Li, C.; Liu, Y. Optimum multiple tuned mass dampers for structures under the ground acceleration based on the uniform distribution of system parameters. Earthq. Eng. Struct. Dyn. 2003, 32, 671–690. [Google Scholar] [CrossRef]
- Elias, S.; Matsagar, V.; Datta, T. Effectiveness of distributed tuned mass dampers for multi-mode control of chimney under earthquakes. Eng. Struct. 2016, 124, 1–16. [Google Scholar] [CrossRef]
- Vaiana, N.; Sessa, S.; Marmo, F.; Rosati, L. A class of uniaxial phenomenological models for simulating hysteretic phenomena in rate-independent mechanical systems and materials. Nonlinear Dyn. 2018, 93, 1647–1669. [Google Scholar] [CrossRef]
- Vaiana, N.; Sessa, S.; Rosati, L. A generalized class of uniaxial rate-independent models for simulating asymmetric mechanical hysteresis phenomena. Mech. Syst. Signal Process. 2021, 146, 106984. [Google Scholar] [CrossRef]
- Zhang, M.; Xu, F. Tuned mass damper for self-excited vibration control: Optimization involving nonlinear aeroelastic effect. J. Wind Eng. Ind. Aerodyn. 2022, 220, 104836. [Google Scholar] [CrossRef]
- Chen, X.; Kareem, A.; Xu, G.; Wang, H.; Sun, Y.; Hu, L. Optimal tuned mass dampers for wind turbines using a Sigmoid satisfaction function-based multiobjective optimization during earthquakes. Wind Energy 2021, 24, 1140–1155. [Google Scholar] [CrossRef]
- Tseng, H.E.; Hrovat, D. State of the art survey: Active and semi-active suspension control. Veh. Syst. Dyn. 2015, 53, 1034–1062. [Google Scholar] [CrossRef]
- Ma, R.; Bi, K.; Hao, H. Inerter-based structural vibration control: A state-of-the-art review. Eng. Struct. 2021, 243, 112655. [Google Scholar] [CrossRef]
- Smith, M.C. The inerter: A retrospective. Annu. Rev. Control. Robot. Auton. Syst. 2020, 3, 361–391. [Google Scholar] [CrossRef]
- Makris, N.; Kampas, G. Seismic protection of structures with supplemental rotational inertia. J. Eng. Mech. 2016, 142, 4016089. [Google Scholar] [CrossRef]
- Smith, M.C.; Houghton, N.E.; Long, P.J.; Glover, A.R. Force-Controlling Hydraulic Device. US Patent 8,881,876, 11 November 2014. [Google Scholar]
- Luo, Y.; Sun, H.; Wang, X.; Chen, A.; Zuo, L. Parametric optimization of electromagnetic tuned inerter damper for structural vibration suppression. Struct. Control Health Monit. 2021, 28, e2711. [Google Scholar] [CrossRef]
- Barredo, E.; Blanco, A.; Colín, J.; Penagos, V.M.; Abúndez, A.; Vela, L.G.; Meza, V.; Cruz, R.H.; Mayén, J. Closed-form solutions for the optimal design of inerter-based dynamic vibration absorbers. Int. J. Mech. Sci. 2018, 144, 41–53. [Google Scholar] [CrossRef]
- Zhang, L.; Xue, S.; Zhang, R.; Xie, L.; Hao, L. Simplified multimode control of seismic response of high-rise chimneys using distributed tuned mass inerter systems (TMIS). Eng. Struct. 2021, 228, 111550. [Google Scholar] [CrossRef]
- Hoang, N.; Fujino, Y.; Warnitchai, P. Optimal tuned mass damper for seismic applications and practical design formulas. Eng. Struct. 2008, 30, 707–715. [Google Scholar] [CrossRef]
- Rahman, M.M.; Nahar, T.T.; Kim, D. Effect of Frequency Characteristics of Ground Motion on Response of Tuned Mass Damper Controlled Inelastic Concrete Frame. Buildings 2021, 11, 74. [Google Scholar] [CrossRef]
- Jia, F.; Jianwen, L. Performance degradation of tuned-mass-dampers arising from ignoring soil-structure interaction effects. Soil Dyn. Earthq. Eng. 2019, 125, 105701. [Google Scholar] [CrossRef]
- Pinkaew, T.; Lukkunaprasit, P.; Chatupote, P. Seismic effectiveness of tuned mass dampers for damage reduction of structures. Eng. Struct. 2003, 25, 39–46. [Google Scholar] [CrossRef]
- Su, N.; Xia, Y.; Peng, S. Filter-based inerter location dependence analysis approach of Tuned mass damper inerter (TMDI) and optimal design. Eng. Struct. 2022, 250, 113459. [Google Scholar] [CrossRef]
- Shi, X.; Zhu, S. Dynamic characteristics of stay cables with inerter dampers. J. Sound Vib. 2018, 423, 287–305. [Google Scholar] [CrossRef]
- Li, C.; Cao, L. High performance active tuned mass damper inerter for structures under the ground acceleration. Earthquakes Struct. 2019, 16, 149–163. [Google Scholar]
- Li, Y.Y.; Park, S.; Jiang, J.Z.; Lackner, M.; Neild, S.; Ward, I. Vibration suppression for monopile and spar-buoy offshore wind turbines using the structure-immittance approach. Wind Energy 2020, 23, 1966–1985. [Google Scholar] [CrossRef]
- Hu, Y.; Chen, M.Z. Performance evaluation for inerter-based dynamic vibration absorbers. Int. J. Mech. Sci. 2015, 99, 297–307. [Google Scholar] [CrossRef] [Green Version]
- Smith, M.C. Synthesis of mechanical networks: The inerter. IEEE Trans. Autom. Control 2002, 47, 1648–1662. [Google Scholar] [CrossRef] [Green Version]
- Shen, W.; Niyitangamahoro, A.; Feng, Z.; Zhu, H. Tuned inerter dampers for civil structures subjected to earthquake ground motions: Optimum design and seismic performance. Eng. Struct. 2019, 198, 109470. [Google Scholar] [CrossRef]
- Messac, A. Optimization in Practice with MATLAB®: For Engineering Students and Professionals; Cambridge University Press: Cambridge, UK, 2015. [Google Scholar]
- Jerome, J.C. Introduction. In Structural Motion Control; Prentice Hall Pearson Education, Inc.: Upper Saddle River, NJ, USA, 2002; pp. 217–285. [Google Scholar]
- Mario, P.; Young, H.K. Structural Dynamics: Theory and Computation; Springer: Berlin, Germany, 2019. [Google Scholar]
- Vaiana, N.; Sessa, S.; Marmo, F.; Rosati, L. Nonlinear dynamic analysis of hysteretic mechanical systems by combining a novel rate-independent model and an explicit time integration method. Nonlinear Dyn. 2019, 98, 2879–2901. [Google Scholar] [CrossRef]
- Chang, S.Y. Family of structure-dependent explicit methods for structural dynamics. J. Eng. Mech. 2014, 140, 6014005. [Google Scholar] [CrossRef]
- Spencer Jr, B.F.; Christenson, R.E.; Dyke, S.J. Next generation benchmark control problem for seismically excited buildings. In In Proceedings of the Second World Conference on Structural Control, Kyoto Japan, Kyoto, Japan, 29 June 1998; 2, pp. 1135–1360. [Google Scholar]
- Shen, W.; Zhu, S.; Zhu, H. Unify energy harvesting and vibration control functions in randomly excited structures with electromagnetic devices. J. Eng. Mech. 2019, 145, 4018115. [Google Scholar] [CrossRef]
- Rahmani, H.R.; Wiering, M.M. Artificial Intelligence Approach for Seismic Control of Structures. Ph.D. Thesis, Bauhaus-Universität Weimar, Weimar, Germany, 2020. [Google Scholar]
- Cook, R.D. Concepts and Applications of Finite Element Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Roy, R.; Craig, J. Structural Dynamics: An Introduction to Computer Methods; John Wiley & Sons: Hoboken, NJ, USA, 1981. [Google Scholar]
- Kiureghian, A.D.; Neuenhofer, A. Response spectrum method for multi-support seismic excitations. Earthq. Eng. Struct. Dyn. 1992, 21, 713–740. [Google Scholar] [CrossRef]
- Ministry of Housing and Urban-Rural Development of the People’s Republic of China. GB 50011–2010; Code for Seismic Design of Buildings. China Building Industry Press: Beijing, China, 2010. (In Chinese) [Google Scholar]
- ASCE. Minimum Design Loads for Buildings and Other Structures; American Society of Civil Engineers: Reston, VA, USA, 2013. [Google Scholar]
- Ancheta, T.D.; Darragh, R.B.; Stewart, J.P.; Seyhan, E.; Silva, W.J.; Chiou, B.S.J.; Wooddell, K.E.; Graves, R.W.; Kottke, A.R.; Boore, D.M.; et al. NGA-West2 database. Earthq. Spectra 2014, 30, 989–1005. [Google Scholar] [CrossRef]
- Tewari, A. Modern Control Design with MATLAB and SIMULINK; Wiley: Chichester, UK, 2002. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TMDI | TMD | ||||||
|---|---|---|---|---|---|---|---|
| —1.969 | —0.907 | 0.578 | —1.800 | 0.220 | —1.043 | ||
| 5.114 | 2.606 | —1.923 | 4.915 | —0.746 | 2.708 | ||
| —4.832 | —2.896 | 2.458 | —4.981 | 1.138 | —2.535 | ||
| 1.855 | 1.485 | —1.997 | 2.160 | —1.269 | 1.389 | ||
| 0.030 | 0.022 | 0.986 | 0.262 | 0.997 | 0.070 | ||
| —1.547 | —1.139 | —0.403 | —2.032 | 0.309 | —1.022 | ||
| 4.261 | 3.166 | —0.133 | 5.379 | —0.968 | 2.703 | ||
| —4.271 | —3.394 | 1.407 | —5.302 | 1.339 | —2.543 | ||
| 1.703 | 1.669 | —1.806 | 2.249 | —1.353 | 1.404 | ||
| 0.043 | 0.006 | 0.962 | 0.251 | 0.990 | 0.073 | ||
| —2.770 | —1.404 | 1.982 | —3.056 | 0.398 | —0.981 | ||
| 6.724 | 3.583 | —5.619 | 7.908 | —1.200 | 2.646 | ||
| —5.880 | —3.596 | 5.567 | —7.391 | 1.549 | —2.507 | ||
| 2.042 | 1.696 | —2.955 | 2.891 | —1.438 | 1.413 | ||
| 0.039 | 0.012 | 1.009 | 0.191 | 0.983 | 0.074 | ||
| TMDI | TMD | |||||
|---|---|---|---|---|---|---|
| (kg) | (kg) | (N·m/s) | (N/m) | (N/m) | (Nm/s) | (N/m) |
| 200.00 | 34.98 | 77.78 | 1272.47 | 372.24 | 214.15 | 1500.50 |
| Soil Type | (rad/s) | (rad/s) | ||
|---|---|---|---|---|
| Firm | 15.0 | 0.6 | 1.5 | 0.6 |
| Medium | 10.0 | 0.4 | 1.0 | 0.6 |
| Soft | 5.0 | 0.2 | 0.5 | 0.6 |
| Series | Earthquake Name | Year | Magnitude | Station Name | (m/s) | (km) |
|---|---|---|---|---|---|---|
| R1 | Chi-Chi_Taiwan | 1999 | 7.62 | CHY019 | 573.04 | 46.59 |
| R2 | Chi-Chi_Taiwan | 1999 | 7.62 | HWA035 | 677.49 | 44.02 |
| R3 | Chi-Chi_Taiwan | 1999 | 7.62 | ILA050 | 621.06 | 63.82 |
| R4 | Chi-Chi_Taiwan | 1999 | 7.62 | TCU071 | 624.85 | 0.00 |
| R5 | Chi-Chi_Taiwan | 1999 | 7.62 | TCU089 | 535.13 | 83.38 |
| R6 | Chi-Chi_Taiwan | 1999 | 7.62 | TTN051 | 665.20 | 30.77 |
| R7 | Chi-Chi_Taiwan | 1999 | 7.62 | TCU129 | 511.18 | 1.83 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, X.; Liu, X.; Chen, J.; Liu, K.; Pang, C. Parameter Optimization and Application for the Inerter-Based Tuned Type Dynamic Vibration Absorbers. Buildings 2022, 12, 703. https://doi.org/10.3390/buildings12060703
Wu X, Liu X, Chen J, Liu K, Pang C. Parameter Optimization and Application for the Inerter-Based Tuned Type Dynamic Vibration Absorbers. Buildings. 2022; 12(6):703. https://doi.org/10.3390/buildings12060703
Chicago/Turabian StyleWu, Xiaoxiang, Xinnan Liu, Jian Chen, Kan Liu, and Chongan Pang. 2022. "Parameter Optimization and Application for the Inerter-Based Tuned Type Dynamic Vibration Absorbers" Buildings 12, no. 6: 703. https://doi.org/10.3390/buildings12060703