
Neural Network-Based Prediction Model for the Stability of Unlined Elliptical Tunnels in Cohesive-Frictional Soils


 , , and
, , and
Abstract
:1. Introduction
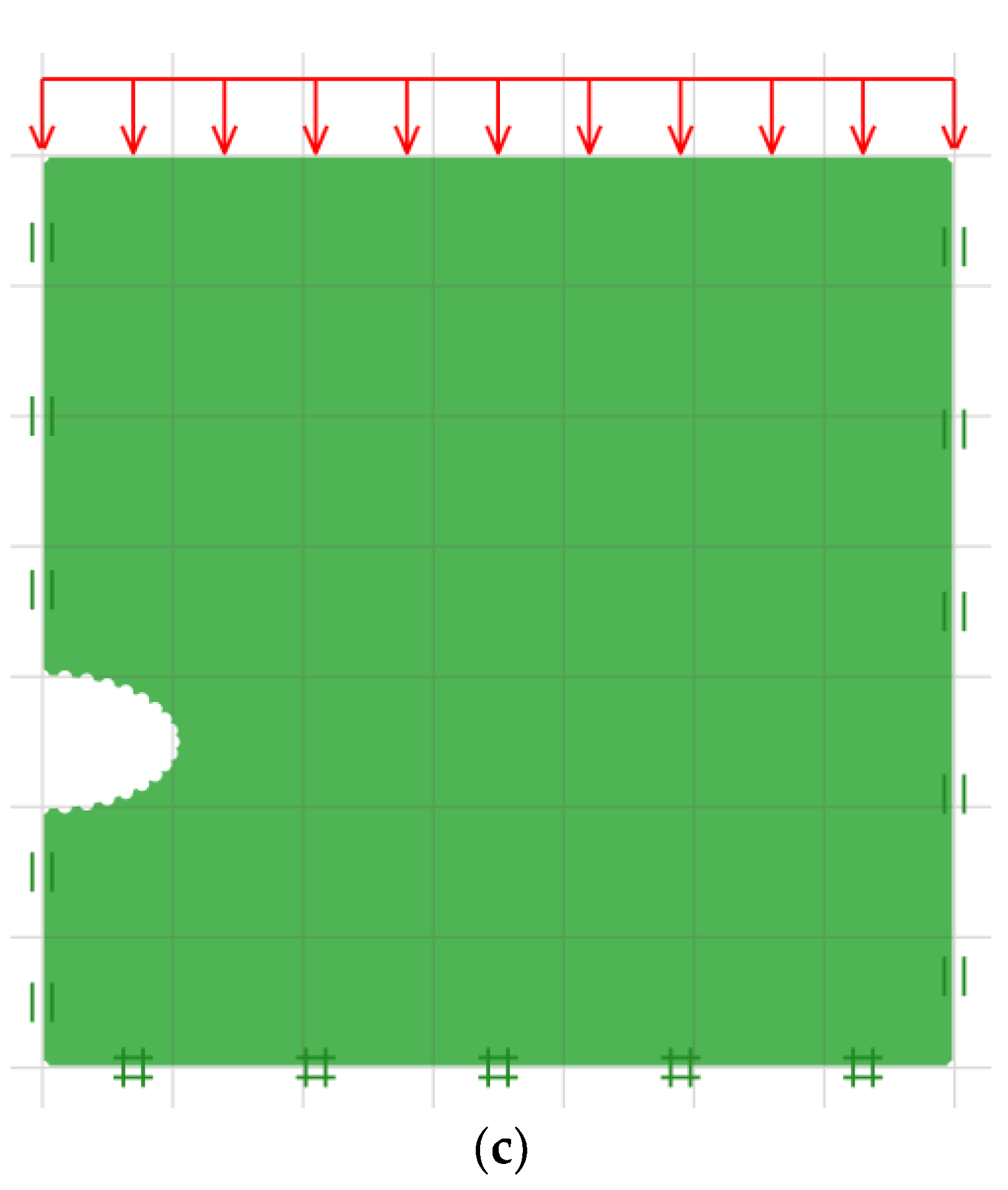
2. Problem Definition
3. Numerical Analysis
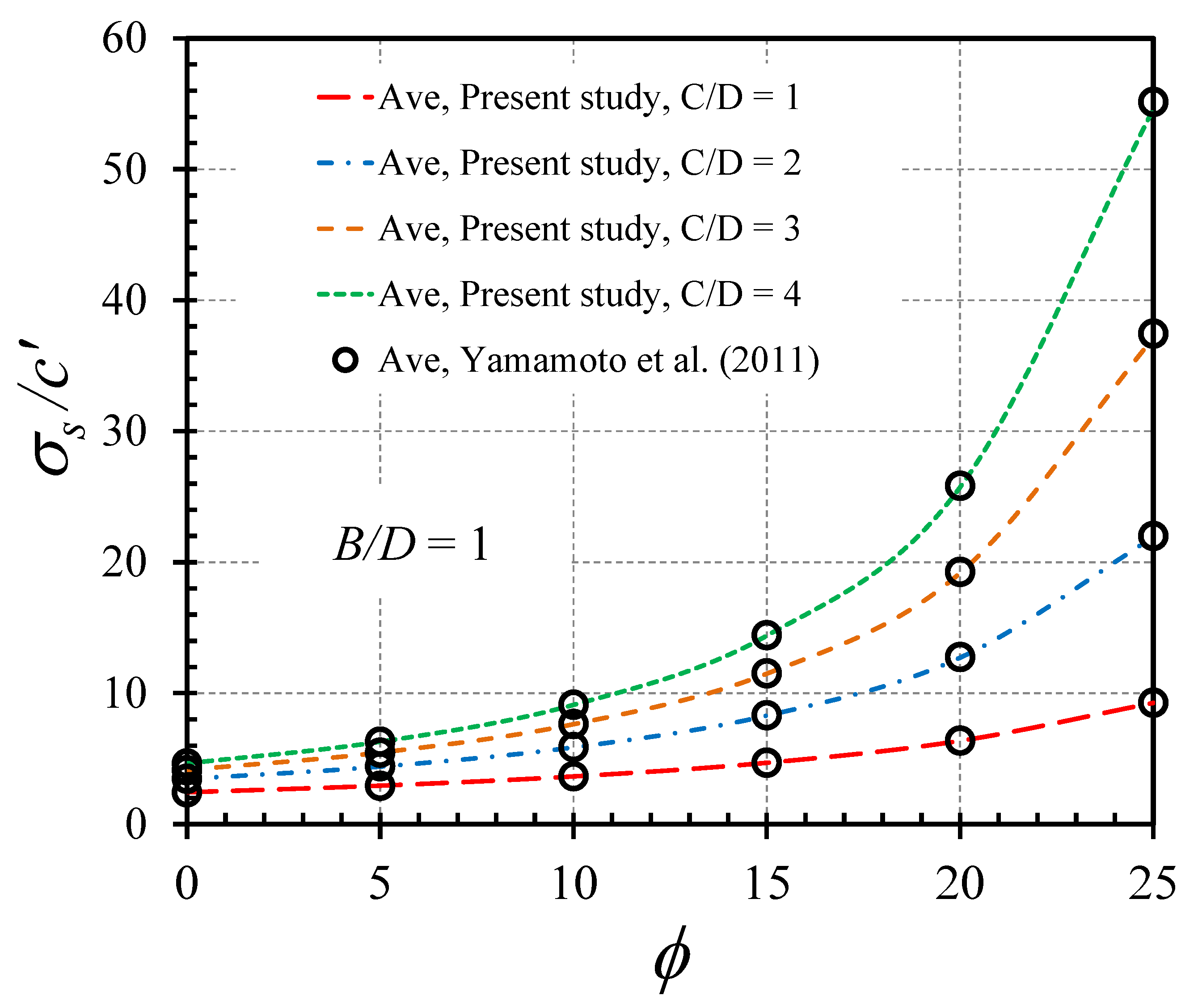
4. FELA Results and Discussion
5. Proposed Models
5.1. Multiple Linear Regression (MLP)
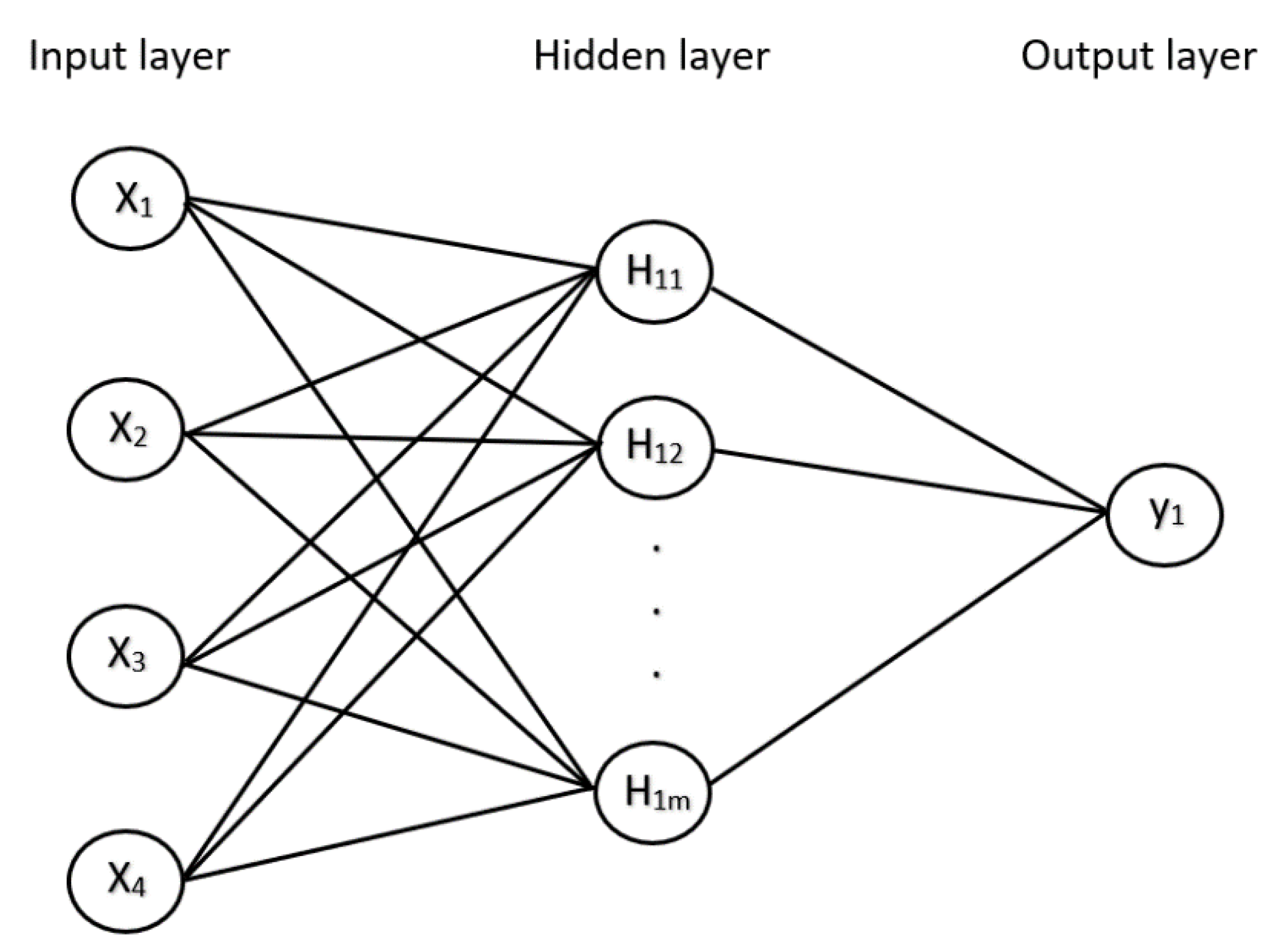
5.2. Artificial Neural Network (ANN)
5.3. Cross-Validation
5.4. Performance Measures
5.5. Multiple Linear Regression (MLR) Equation
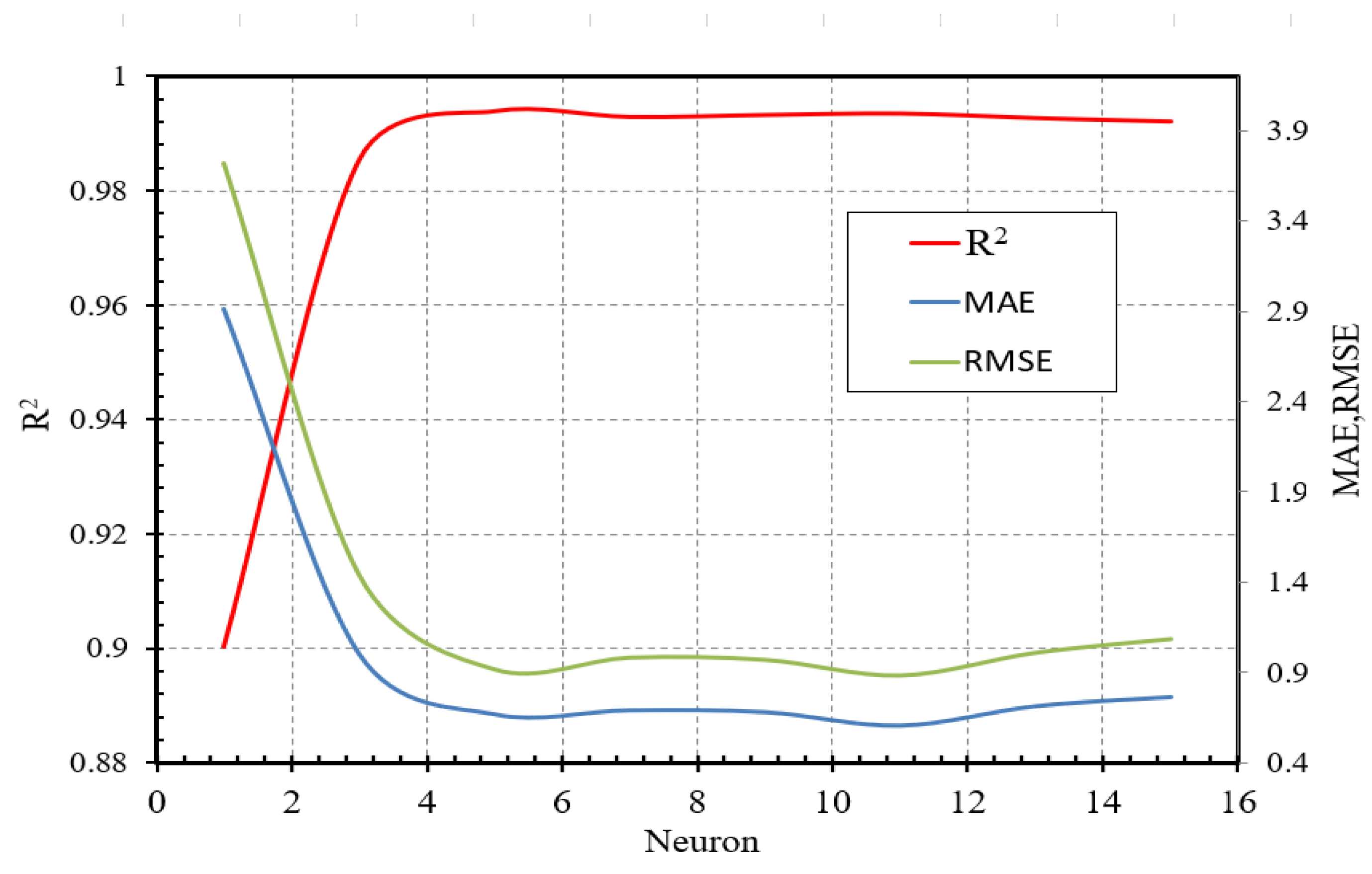
5.6. Details of Proposed Artificial Neural Network (ANN) Model
6. Conclusions
- The combination of FELA solutions and the ANN is presented as a guide for geotechnical engineers. Note that the proposed predictive model for the stability factor of this problem can be evaluated based on the complex solutions that are derived from the matrices obtained in this study.
- It is notable that just one hidden layer with seven neurons can sufficiently build a reliable high-performance neural network model.
- The proposed model can be used to accurately predict the stability factor of shallow elliptical tunnels in cohesive-frictional soils based on a new dataset using the weight and bias matrices derived in this study.
- The limitation of the proposed model is that the new dataset should be within the ranges provided in this study.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sloan, S.; Assadi, A. Undrained stability of a plane strain heading. Can. Geotech. J. 1994, 31, 443–450. [Google Scholar] [CrossRef]
- Ukritchon, B.; Keawsawasvong, S.; Yingchaloenkitkhajorn, K. Undrained face stability of tunnels in Bangkok subsoils. Int. J. Geotech. Eng. 2016, 11, 262–277. [Google Scholar] [CrossRef]
- Mair, R.J. Centrifugal Modelling of Tunnel Construction in Soft Clay. Ph.D. Thesis, Cambridge University, Cambridge, UK, 1979. [Google Scholar] [CrossRef]
- Shiau, J.; Al-Asadi, F. Three-Dimensional Analysis of Circular Tunnel Headings Using Broms and Bennermark’s Original Stability Number. Int. J. Géoméch. 2020, 20, 06020015. [Google Scholar] [CrossRef]
- Ukritchon, B.; Keawsawasvong, S. Lower bound stability analysis of plane strain headings in Hoek-Brown rock masses. Tunn. Undergr. Space Technol. 2018, 84, 99–112. [Google Scholar] [CrossRef]
- Ukritchon, B.; Keawsawasvong, S. Stability of Retained Soils Behind Underground Walls with an Opening Using Lower Bound Limit Analysis and Second-Order Cone Programming. Geotech. Geol. Eng. 2018, 37, 1609–1625. [Google Scholar] [CrossRef]
- Ukritchon, B.; Keawsawasvong, S. Design equations for undrained stability of opening in underground walls. Tunn. Undergr. Space Technol. 2017, 70, 214–220. [Google Scholar] [CrossRef]
- Fraldi, M.; Guarracino, F. Limit analysis of collapse mechanisms in cavities and tunnels according to the Hoek–Brown failure criterion. Int. J. Rock Mech. Min. Sci. 2009, 46, 665–673. [Google Scholar] [CrossRef]
- Davis, E.H.; Gunn, M.J.; Mair, R.J.; Seneviratine, H.N. The stability of shallow tunnels and underground openings in cohesive material. Geotechnique 1980, 30, 397–416. [Google Scholar] [CrossRef]
- Ukritchon, B.; Keawsawasvong, S. Lower bound solutions for undrained face stability of plane strain tunnel headings in anisotropic and non-homogeneous clays. Comput. Geotech. 2019, 112, 204–217. [Google Scholar] [CrossRef]
- Ukritchon, B.; Yingchaloenkitkhajorn, K.; Keawsawasvong, S. Three-dimensional undrained tunnel face stability in clay with a linearly increasing shear strength with depth. Comput. Geotech. 2017, 88, 146–151. [Google Scholar] [CrossRef]
- Drucker, D.C.; Prager, W.; Greenberg, H.J. Extended limit design theorems for continuous media. Q. Appl. Math. 1952, 9, 381–389. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.F.; Liu, X.L. Limit Analysis in Soil Mechanics; Elsevier: Amsterdam, The Netherlands, 1990. [Google Scholar]
- Sloan, S. Geotechnical stability analysis. Géotechnique 2013, 63, 531–571. [Google Scholar] [CrossRef] [Green Version]
- Sloan, S.W.; Assadi, A. Undrained stability of a square tunnel whose strength increases linearly with depth. Comput. Geotech. 1991, 12, 321–346. [Google Scholar] [CrossRef]
- Wilson, D.W.; Abbo, A.J.; Sloan, S.W.; Lyamin, A.V. Undrained stability of a circular tunnel where the shear strength increases linearly with depth. Can. Geotech. J. 2011, 48, 1328–1342. [Google Scholar] [CrossRef]
- Abbo, A.J.; Wilson, D.W.; Sloan, S.; Lyamin, A. Undrained stability of wide rectangular tunnels. Comput. Geotech. 2013, 53, 46–59. [Google Scholar] [CrossRef]
- Wilson, D.W.; Abbo, A.J.; Sloan, S.W. Undrained stability of tall tunnels. In Proceedings of the 14th International Conference of International Association for Computer Methods and Recent Advances in Geomechanics, Kyoto, Japan, 22–25 September 2014. [Google Scholar]
- Yamamoto, K.; Lyamin, A.; Wilson, D.W.; Sloan, S.; Abbo, A. Stability of a circular tunnel in cohesive-frictional soil subjected to surcharge loading. Comput. Geotech. 2011, 38, 504–514. [Google Scholar] [CrossRef]
- Yamamoto, K.; Lyamin, A.; Wilson, D.W.; Sloan, S.; Abbo, A. Stability of a single tunnel in cohesive–frictional soil subjected to surcharge loading. Can. Geotech. J. 2011, 48, 1841–1854. [Google Scholar] [CrossRef]
- Keawsawasvong, S.; Ukritchon, B. Undrained stability of plane strain active trapdoors in anisotropic and non-homogeneous clays. Tunn. Undergr. Space Technol. 2020, 107, 103628. [Google Scholar] [CrossRef]
- Keawsawasvong, S.; Ukritchon, B. Design equation for stability of shallow unlined circular tunnels in Hoek-Brown rock masses. Bull. Eng. Geol. Environ. 2020, 79, 4167–4190. [Google Scholar] [CrossRef]
- Keawsawasvong, S.; Likitlersuang, S. Undrained stability of active trapdoors in two-layered clays. Undergr. Space 2020, 6, 446–454. [Google Scholar] [CrossRef]
- Keawsawasvong, S.; Shiau, J. Stability of active trapdoors in axisymmetry. Undergr. Space 2021, 7, 50–57. [Google Scholar] [CrossRef]
- Ukritchon, B.; Keawsawasvong, S. Stability of unlined square tunnels in Hoek-Brown rock masses based on lower bound analysis. Comput. Geotech. 2018, 105, 249–264. [Google Scholar] [CrossRef]
- Ukritchon, B.; Keawsawasvong, S. Undrained Stability of Unlined Square Tunnels in Clays with Linearly Increasing Anisotropic Shear Strength. Geotech. Geol. Eng. 2019, 38, 897–915. [Google Scholar] [CrossRef]
- Yang, F.; Zhang, J.; Yang, J.; Zhao, L.; Zheng, X. Stability analysis of unlined elliptical tunnel using finite element upper-bound method with rigid translatory moving elements. Tunn. Undergr. Space Technol. 2015, 50, 13–22. [Google Scholar] [CrossRef]
- Yang, F.; Sun, X.; Zheng, X.; Yang, J. Stability analysis of a deep buried elliptical tunnel in cohesive–frictional (c–ϕ) soils with a nonassociated flow rule. Can. Geotech. J. 2017, 54, 736–741. [Google Scholar] [CrossRef]
- Yang, F.; Sun, X.; Zou, J.; Zheng, X. Analysis of an elliptical tunnel affected by surcharge loading. Proc. Inst. Civ. Eng. -Geotech. Eng. 2019, 172, 312–319. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, J.; Yang, F.; Zhang, X.; Zheng, X. Upper-Bound Solution for Stability Number of Elliptical Tunnel in Cohesionless Soils. Int. J. Géoméch. 2017, 17, 06016011. [Google Scholar] [CrossRef]
- Dutta, P.; Bhattacharya, P. Determination of internal pressure for the stability of dual elliptical tunnels in soft clay. Géoméch. Geoengin. 2019, 16, 67–79. [Google Scholar] [CrossRef]
- Amberg, R. Design and construction of the Furka base tunnel. Rock Mech. Rock Eng. 1983, 16, 215–231. [Google Scholar] [CrossRef]
- Wone, M.; Nasri, V.; Ryzhevskiy, M. Rock tunnelling challenges in Manhattan. In Claiming the Underground Space, 1st ed.; Routledge: Oxfordshire, UK, 2003; Volume 1, pp. 145–151. [Google Scholar]
- Miura, K. Design and construction of mountain tunnels in Japan. Tunn. Undergr. Space Technol. 2003, 18, 115–126. [Google Scholar] [CrossRef]
- Miura, K.; Yagi, H.; Shiroma, H.; Takekuni, K. Study on design and construction method for the New Tomei–Meishin expressway tunnels. Tunn. Undergr. Space Technol. 2003, 18, 271–281. [Google Scholar] [CrossRef]
- Hochmuth, W.; Kritschke, A.; Weber, J. Subway construction in Munich, developments in tunneling with shotcrete support. Rock Mech. Rock Eng. 1987, 20, 1–38. [Google Scholar] [CrossRef]
- Li, A.; Khoo, S.; Lyamin, A.; Wang, Y. Rock slope stability analyses using extreme learning neural network and terminal steepest descent algorithm. Autom. Constr. 2016, 65, 42–50. [Google Scholar] [CrossRef]
- Li, A.-J.; Lim, K.; Fatty, A. Stability evaluations of three-layered soil slopes based on extreme learning neural network. Transactions of the Chinese Institute of Engineers, Series A. J. Chin. Inst. Eng. 2020, 43, 628–637. [Google Scholar] [CrossRef]
- Qian, Z.; Li, A.; Chen, W.; Lyamin, A.; Jiang, J. An artificial neural network approach to inhomogeneous soil slope stability predictions based on limit analysis methods. Soils Found. 2019, 59, 556–569. [Google Scholar] [CrossRef]
- Keawsawasvong, S.; Seehavong, S.; Ngamkhanong, C. Application of Artificial Neural Networks for Predicting the Stability of Rectangular Tunnels in Hoek–Brown Rock Masses. Front. Built Environ. 2022, 8, 837745. [Google Scholar] [CrossRef]
- Butterfield, R. Dimensional analysis for geotechnical engineers. Geotechnique 1999, 49, 357–366. [Google Scholar] [CrossRef]
- Ukritchon, B.; Keawsawasvong, S. Unsafe Error in Conventional Shape Factor for Shallow Circular Foundations in Normally Consolidated Clays. J. Geotech. Geoenviron. Eng. 2017, 143, 02817001. [Google Scholar] [CrossRef]
- Ukritchon, B.; Keawsawasvong, S. Error in Ito and Matsui’s Limit-Equilibrium Solution of Lateral Force on a Row of Stabilizing Piles. J. Geotech. Geoenviron. Eng. 2017, 143, 02817004. [Google Scholar] [CrossRef]
- Keawsawasvong, S.; Ukritchon, B. Undrained lateral capacity of I-shaped concrete piles. Songklanakarin J. Sci. Technol. 2017, 39, 751–758. [Google Scholar]
- Keawsawasvong, S.; Ukritchon, B. Finite element analysis of undrained stability of cantilever flood walls. Int. J. Geotech. Eng. 2016, 11, 355–367. [Google Scholar] [CrossRef]
- Ukritchon, B.; Wongtoythong, P.; Keawsawasvong, S. New design equation for undrained pullout capacity of suction caissons considering combined effects of caisson aspect ratio, adhesion factor at interface, and linearly increasing strength. Appl. Ocean Res. 2018, 75, 1–14. [Google Scholar] [CrossRef]
- Ukritchon, B.; Keawsawasvong, S. Design equations of uplift capacity of circular piles in sands. Appl. Ocean Res. 2019, 90, 101844. [Google Scholar] [CrossRef]
- Ukritchon, B.; Yoang, S.; Keawsawasvong, S. Three-dimensional stability analysis of the collapse pressure on flexible pavements over rectangular trapdoors. Transp. Geotech. 2019, 21, 100277. [Google Scholar] [CrossRef]
- Ukritchon, B.; Yoang, S.; Keawsawasvong, S. Undrained stability of unsupported rectangular excavations in non-homogeneous clays. Comput. Geotech. 2019, 117, 103281. [Google Scholar] [CrossRef]
- Ukritchon, B.; Keawsawasvong, S. Undrained lower bound solutions for end bearing capacity of shallow circular piles in non-homogeneous and anisotropic clays. Int. J. Numer. Anal. Methods Geomech. 2020, 44, 596–632. [Google Scholar] [CrossRef]
- Yodsomjai, W.; Keawsawasvong, S.; Senjuntichai, T. Undrained Stability of Unsupported Conical Slopes in Anisotropic Clays Based on Anisotropic Undrained Shear Failure Criterion. Transp. Infrastruct. Geotechnol. 2021, 8, 557–568. [Google Scholar] [CrossRef]
- Krabbenhoft, K.; Lyamin, A.; Krabbenhoft, J. Optum Computational Engineering (OptumG2 Version G2 2020_2020.08.17). Available online: www.optumce.com (accessed on 1 July 2020).
- Ciria, H.; Peraire, J.; Bonet, J. Mesh adaptive computation of upper and lower bounds in limit analysis. Int. J. Numer. Methods Eng. 2008, 75, 899–944. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Parameters | Values | Average |
|---|---|---|
| C/D | 1, 2, 3, 4 | 2.5 |
| B/D | 0.5, 0.75, 1, 1.33, 2 | 1.116 |
| γD/c′ | 0, 1, 2 | 1.5 |
| ϕ | 0, 5, 10, 15, 20, 25 | 12.5 |
| γD/c′ | B/D | ϕ | C/D = 1 | C/D = 2 | C/D = 3 | C/D = 4 |
|---|---|---|---|---|---|---|
| 0 | 0.5 | 0 | 3.194 | 4.042 | 4.6415 | 5.112 |
| 5 | 3.941 | 5.2585 | 6.2735 | 7.11 | ||
| 10 | 5.0205 | 7.197 | 9.0535 | 10.671 | ||
| 15 | 6.7035 | 10.6005 | 14.3025 | 17.758 | ||
| 20 | 9.537 | 17.311 | 25.606 | 34.1285 | ||
| 25 | 14.846 | 32.5035 | 54.5715 | 80.1625 | ||
| 0.75 | 0 | 2.8235 | 3.766 | 4.3965 | 4.877 | |
| 5 | 3.449 | 4.8515 | 5.8745 | 6.698 | ||
| 10 | 4.3435 | 6.5475 | 8.3315 | 9.8635 | ||
| 15 | 5.6975 | 9.4395 | 12.83 | 15.989 | ||
| 20 | 7.9025 | 14.885 | 22.1915 | 29.491 | ||
| 25 | 11.9115 | 26.743 | 45.0285 | 65.952 | ||
| 1 | 0 | 2.4365 | 3.4595 | 4.131 | 4.6315 | |
| 5 | 2.9435 | 4.406 | 5.4625 | 6.29 | ||
| 10 | 3.65 | 5.875 | 7.622 | 9.1015 | ||
| 15 | 4.6915 | 8.2945 | 11.4835 | 14.387 | ||
| 20 | 6.3665 | 12.72 | 19.1735 | 25.7245 | ||
| 25 | 9.2615 | 21.9155 | 37.1275 | 54.594 | ||
| 1.33 | 0 | 1.9845 | 3.0405 | 3.7625 | 4.297 | |
| 5 | 2.346 | 3.827 | 4.9115 | 5.7565 | ||
| 10 | 2.844 | 5.006 | 6.7365 | 8.174 | ||
| 15 | 3.559 | 6.8775 | 9.8775 | 12.558 | ||
| 20 | 4.6385 | 10.23 | 15.913 | 21.5575 | ||
| 25 | 6.4805 | 16.798 | 29.2085 | 43.145 | ||
| 2 | 0 | 1.369 | 2.3015 | 3.0505 | 3.637 | |
| 5 | 1.5485 | 2.8055 | 3.878 | 4.7595 | ||
| 10 | 1.7905 | 3.533 | 5.148 | 6.533 | ||
| 15 | 2.5705 | 4.6475 | 7.226 | 9.6325 | ||
| 20 | 2.1125 | 6.473 | 10.9655 | 15.5125 | ||
| 25 | 3.293 | 9.714 | 18.507 | 28.4055 | ||
| 1 | 0.5 | 0 | 1.846 | 1.6285 | 1.206 | 0.6655 |
| 5 | 2.501 | 2.6405 | 2.508 | 2.202 | ||
| 10 | 3.451 | 4.2855 | 4.785 | 5.032 | ||
| 15 | 4.9415 | 7.2425 | 9.2465 | 10.9705 | ||
| 20 | 7.482 | 13.205 | 19.229 | 25.3425 | ||
| 25 | 12.383 | 27.1315 | 45.591 | 67.3385 | ||
| 0.75 | 0 | 1.5695 | 1.4205 | 1.011 | 0.471 | |
| 5 | 2.1085 | 2.3035 | 2.163 | 1.8355 | ||
| 10 | 2.877 | 3.7025 | 4.126 | 4.287 | ||
| 15 | 4.0515 | 6.1475 | 7.8615 | 9.28 | ||
| 20 | 6.004 | 10.8555 | 15.9195 | 20.9795 | ||
| 25 | 9.5875 | 21.4915 | 36.3595 | 53.6445 | ||
| 1 | 0 | 1.2515 | 1.1815 | 0.8005 | 0.2685 | |
| 5 | 1.6745 | 1.9235 | 1.8025 | 1.4675 | ||
| 10 | 2.266 | 3.098 | 3.4675 | 3.562 | ||
| 15 | 3.15 | 5.0775 | 6.55 | 7.7195 | ||
| 20 | 4.574 | 8.803 | 12.9935 | 17.166 | ||
| 25 | 7.0895 | 16.763 | 28.6415 | 42.36 | ||
| 1.33 | 0 | 0.85 | 0.832 | 0.5025 | −0.003 | |
| 5 | 1.1365 | 1.413 | 1.3145 | 0.9875 | ||
| 10 | 1.5315 | 2.2985 | 2.6275 | 2.6665 | ||
| 15 | 2.1005 | 3.7575 | 4.979 | 5.903 | ||
| 20 | 2.9985 | 6.3965 | 9.72 | 12.9735 | ||
| 25 | 4.4975 | 11.7655 | 20.696 | 30.9425 | ||
| 2 | 0 | 0.2685 | 0.1605 | −0.1195 | −0.5595 | |
| 5 | 0.397 | 0.4785 | 0.37 | 0.065 | ||
| 10 | 0.562 | 0.9475 | 1.134 | 1.0765 | ||
| 15 | 0.793 | 1.682 | 2.431 | 2.947 | ||
| 20 | 1.117 | 2.9245 | 4.892 | 6.805 | ||
| 25 | 1.6395 | 5.223 | 10.1485 | 15.953 | ||
| 2 | 0.5 | 0 | 0.43 | −0.834 | −2.277 | −3.8305 |
| 5 | 1.016 | −0.0105 | −1.304 | −2.778 | ||
| 10 | 1.8475 | 1.3195 | 0.4135 | −0.811 | ||
| 15 | 3.1475 | 3.777 | 3.9625 | 3.726 | ||
| 20 | 5.3945 | 8.93 | 12.4105 | 15.7345 | ||
| 25 | 9.826 | 21.3065 | 35.934 | 53.1345 | ||
| 0.75 | 0 | 0.244 | −0.99 | −2.4375 | −3.9995 | |
| 5 | 0.727 | −0.28 | −1.589 | −3.0845 | ||
| 10 | 1.388 | 0.8205 | −0.171 | −1.476 | ||
| 15 | 2.39 | 2.7845 | 2.6755 | 2.145 | ||
| 20 | 4.066 | 6.749 | 9.256 | 11.528 | ||
| 25 | 7.2225 | 15.9395 | 26.8835 | 39.7155 | ||
| 1 | 0 | 0.0105 | −1.1685 | −2.605 | −4.1705 | |
| 5 | 0.3795 | −0.5795 | −1.89 | −3.4055 | ||
| 10 | 0.866 | 0.2925 | −0.7695 | −2.1495 | ||
| 15 | 1.583 | 1.792 | 1.413 | 0.607 | ||
| 20 | 2.7585 | 4.7355 | 6.351 | 7.706 | ||
| 25 | 4.8905 | 11.302 | 19.2535 | 28.498 | ||
| 1.33 | 0 | −0.3225 | −1.4325 | −2.8375 | −4.395 | |
| 5 | −0.0875 | −1.02 | −2.308 | −3.8255 | ||
| 10 | 0.2075 | −0.431 | −1.5525 | −3.017 | ||
| 15 | 0.645 | 0.5505 | −0.1295 | −1.268 | ||
| 20 | 1.327 | 2.413 | 3.06 | 3.3055 | ||
| 25 | 2.5005 | 6.4225 | 11.193 | 16.616 | ||
| 2 | 0 | −0.845 | −2.001 | −3.329 | −4.831 | |
| 5 | −0.766 | −1.855 | −3.1525 | −4.6615 | ||
| 10 | −0.668 | −1.657 | −2.9515 | −4.5875 | ||
| 15 | −0.5315 | −1.344 | −2.6155 | −3.644 | ||
| 20 | −0.3435 | −0.7905 | −1.8125 | −2.648 | ||
| 25 | −0.0305 | 0.3445 | 0.49 | 0.2425 |
| Methodology | R2 | Mean Absolute Error (MAE) | Root Mean Squared Error (RMSE) |
|---|---|---|---|
| Multiple Linear Regression (MLR) | 0.7536 | 5.1777 | 7.7086 |
| Artificial Neural Network (ANN) | 0.9967 | 0.6774 | 0.9666 |
| Hidden Layer Neurons (i) | Hidden Layer Bias (b1) | Hidden Weight IW1 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| B/D (j = 1) | ϕ (j = 2) | γD/σci (j = 3) | C/D (j = 4) | |||||||
| 1 | −1.8972 | 0.4966 | 0.3791 | −0.4916 | 0.2817 | |||||
| 2 | −1.4926 | 0.5715 | −0.2262 | 0.1143 | 0.7693 | |||||
| 3 | −5.1539 | 1.0019 | −1.0584 | 0.2803 | 2.9550 | |||||
| 4 | −0.5608 | −0.0674 | 0.1779 | 0.0326 | 0.3379 | |||||
| 5 | −0.8563 | 1.1308 | −0.3793 | −0.0940 | 0.8034 | |||||
| 6 | −0.6919 | 0.0469 | −0.0108 | −0.0048 | 0.3094 | |||||
| 7 | −3.2286 | 0.5069 | −0.1487 | −0.4482 | 1.5636 | |||||
| 8 | −1.4544 | −0.7200 | 1.1056 | 0.4755 | 0.8460 | |||||
| 9 | −1.9549 | 1.6058 | −0.0265 | 0.9068 | −0.1308 | |||||
| Output layer node (k) | Output layer bias (b2) | Output weight IW2 | ||||||||
| i = 1 | i = 2 | i = 3 | i = 4 | i = 5 | i = 6 | i = 7 | i =8 | i = 9 | ||
| 1 | 2.6100 | −0.8506 | −0.7820 | −3.5971 | −0.0863 | −0.8197 | −0.0514 | −1.6245 | 0.6988 | 1.8593 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sirimontree, S.; Keawsawasvong, S.; Ngamkhanong, C.; Seehavong, S.; Sangjinda, K.; Jearsiripongkul, T.; Thongchom, C.; Nuaklong, P. Neural Network-Based Prediction Model for the Stability of Unlined Elliptical Tunnels in Cohesive-Frictional Soils. Buildings 2022, 12, 444. https://doi.org/10.3390/buildings12040444
Sirimontree S, Keawsawasvong S, Ngamkhanong C, Seehavong S, Sangjinda K, Jearsiripongkul T, Thongchom C, Nuaklong P. Neural Network-Based Prediction Model for the Stability of Unlined Elliptical Tunnels in Cohesive-Frictional Soils. Buildings. 2022; 12(4):444. https://doi.org/10.3390/buildings12040444
Chicago/Turabian StyleSirimontree, Sayan, Suraparb Keawsawasvong, Chayut Ngamkhanong, Sorawit Seehavong, Kongtawan Sangjinda, Thira Jearsiripongkul, Chanachai Thongchom, and Peem Nuaklong. 2022. "Neural Network-Based Prediction Model for the Stability of Unlined Elliptical Tunnels in Cohesive-Frictional Soils" Buildings 12, no. 4: 444. https://doi.org/10.3390/buildings12040444