
Vibration-Based and Near Real-Time Seismic Damage Assessment Adaptive to Building Knowledge Level

 ,
,  , , , , ,
, , , , ,
Abstract
:1. Introduction
2. Dynamic Identification and Damage Prediction Methods
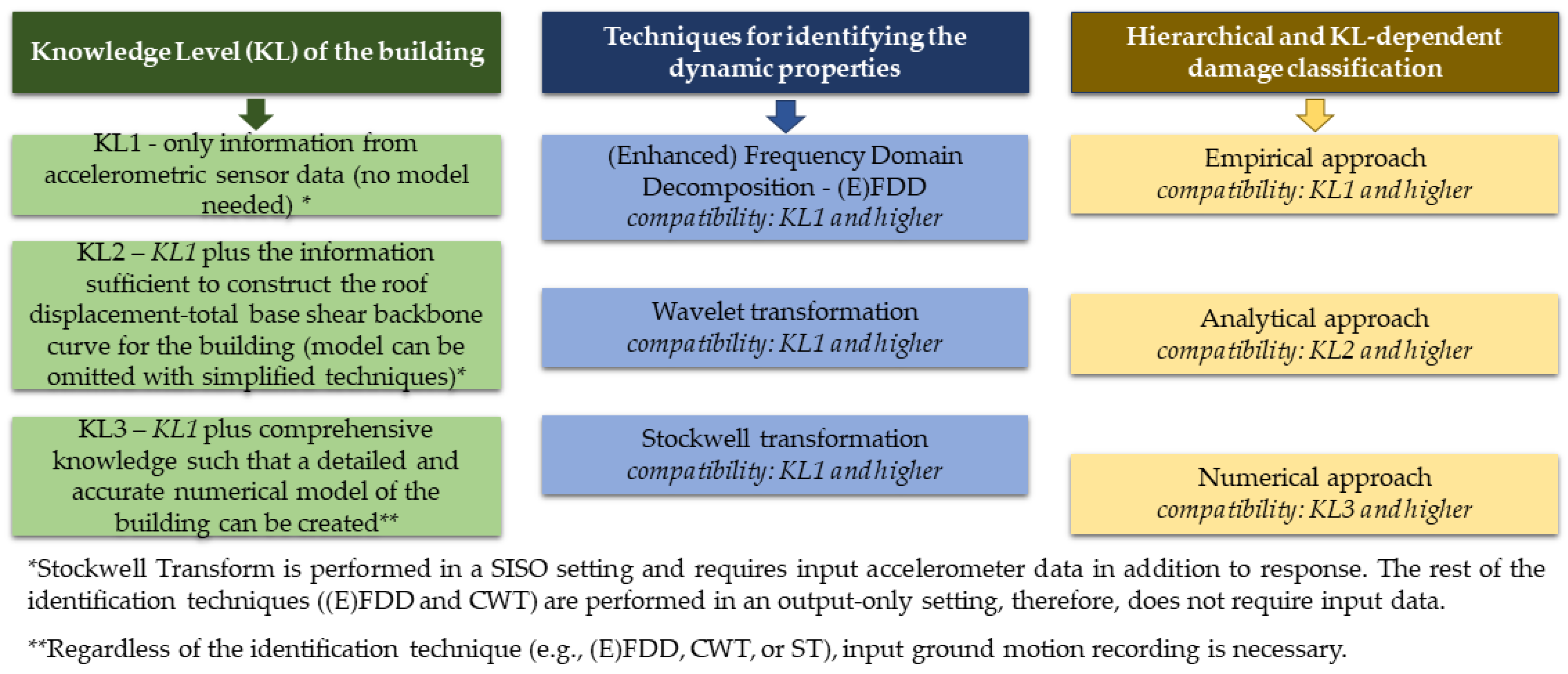
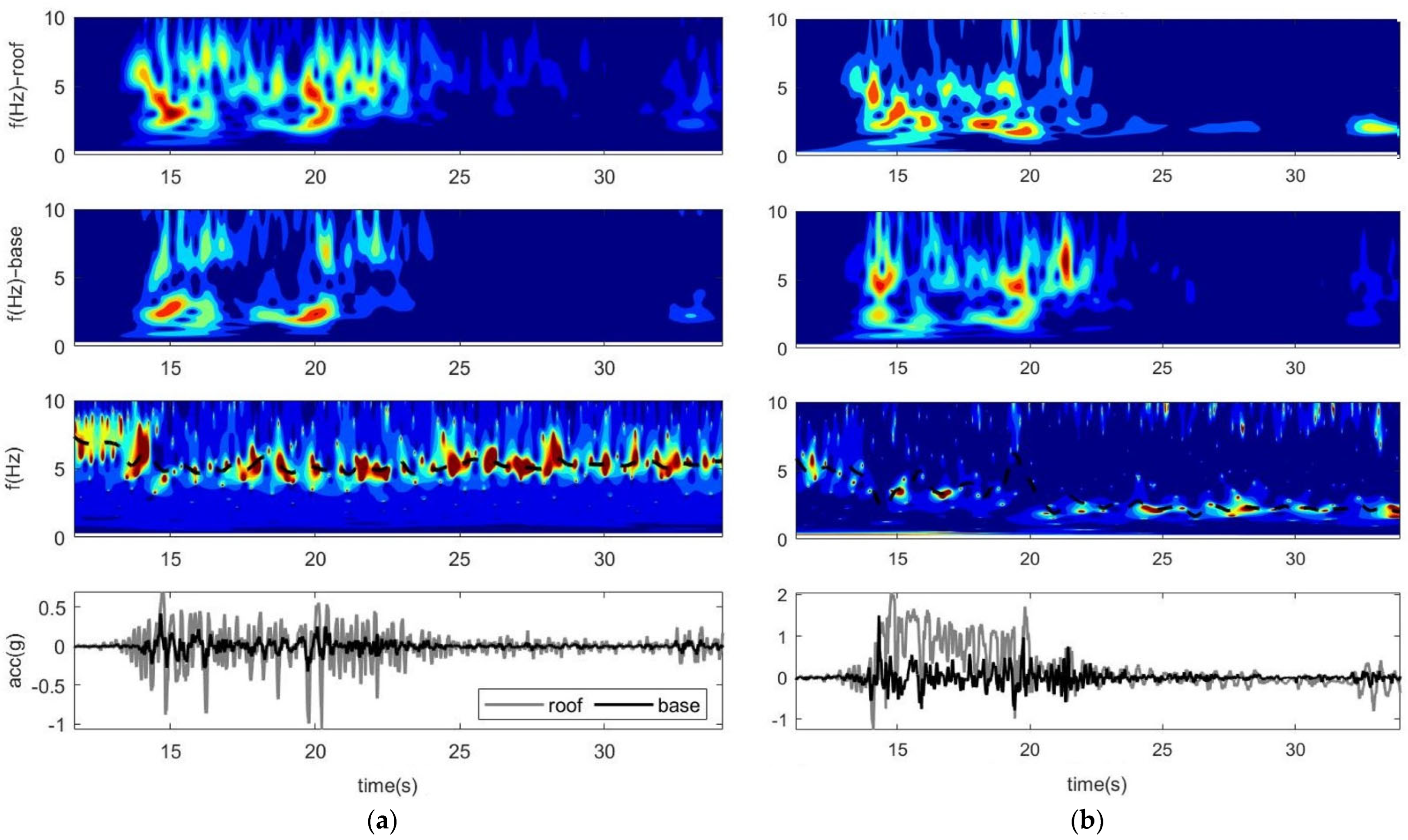
2.1. Overview of Selected Tools for Dynamic Identification
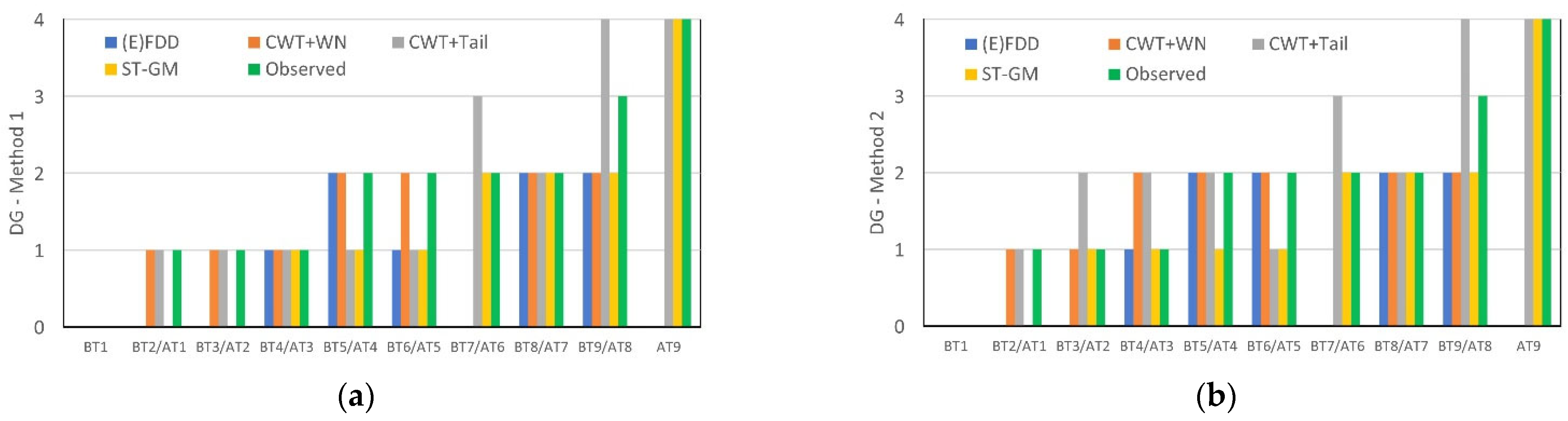
2.2. Overview of Selected Methods for Damage Assessment
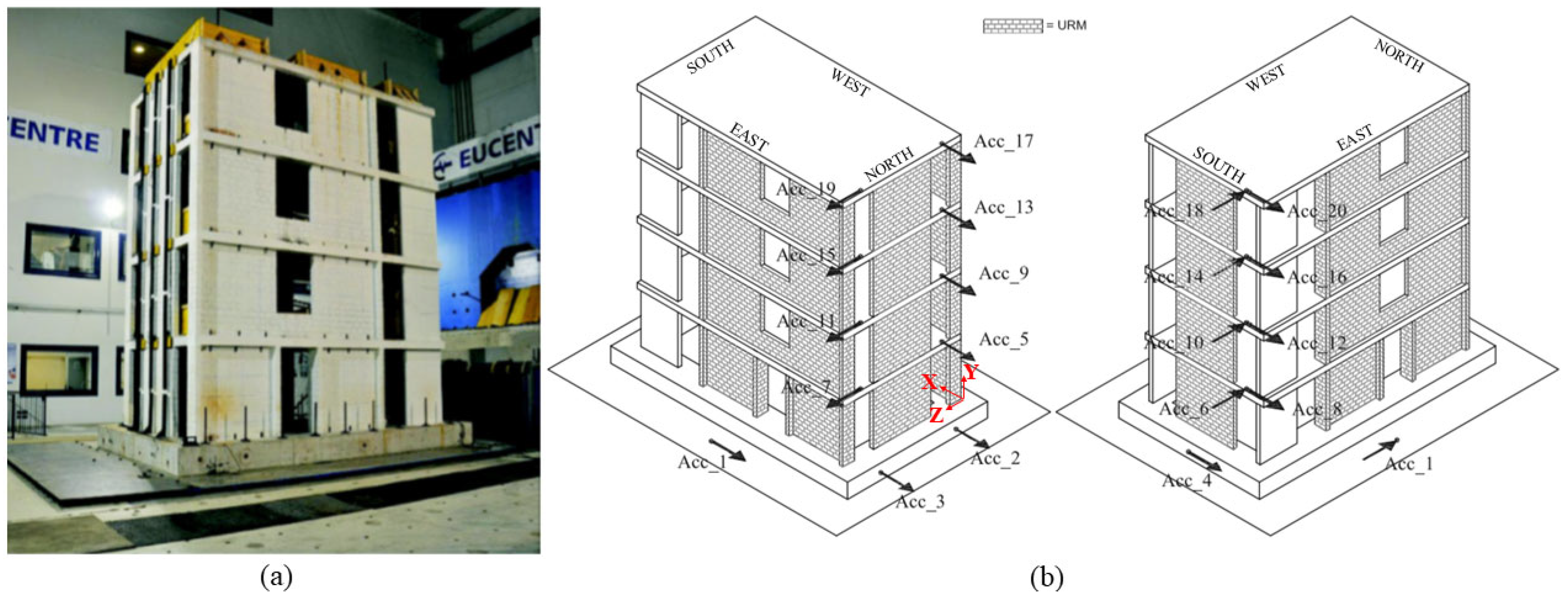
3. Experimental Setup of a Multi-Story Building
3.1. Experimental Configuration
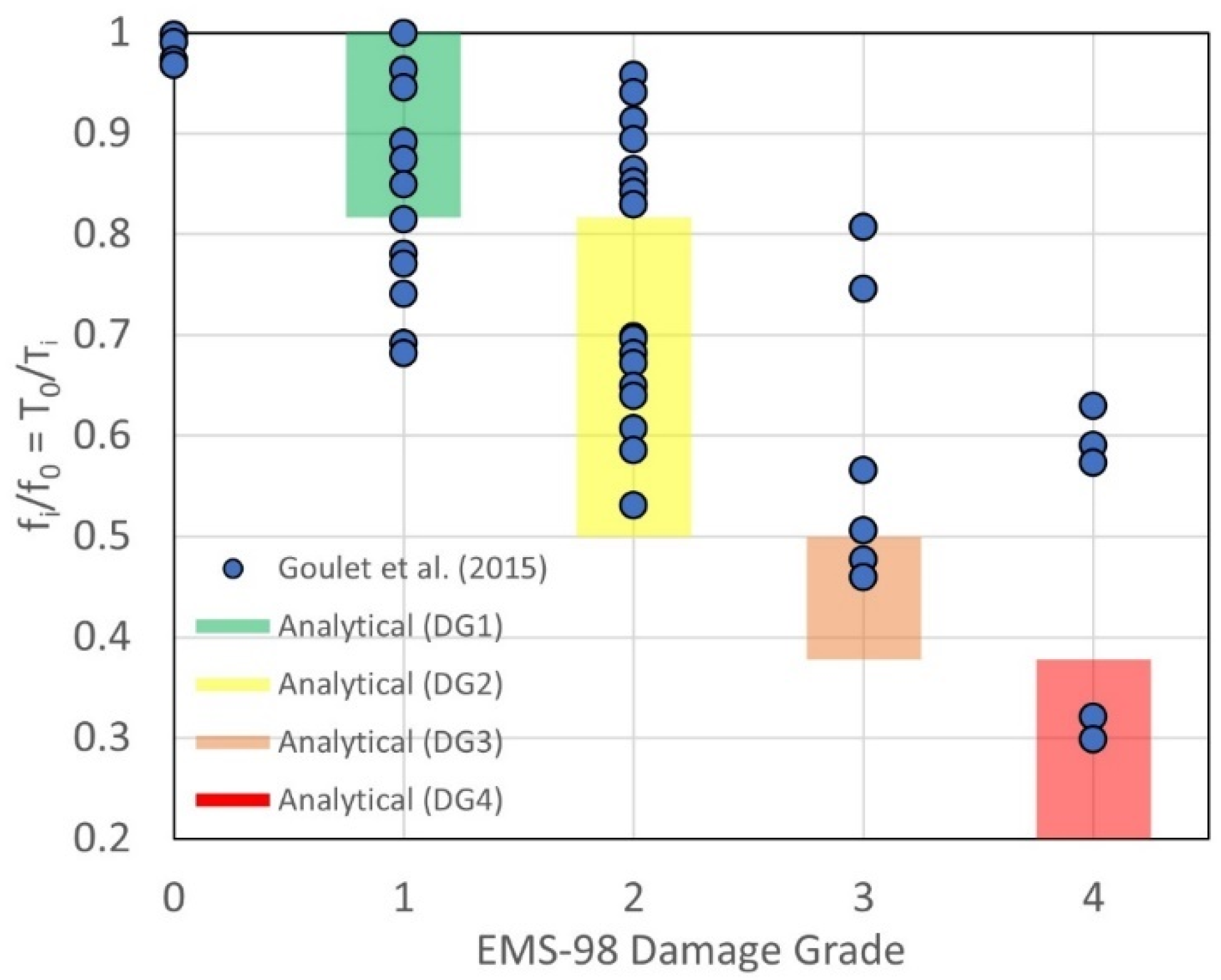
3.2. Limit State Thresholds for the EMS-98 Damage Grades
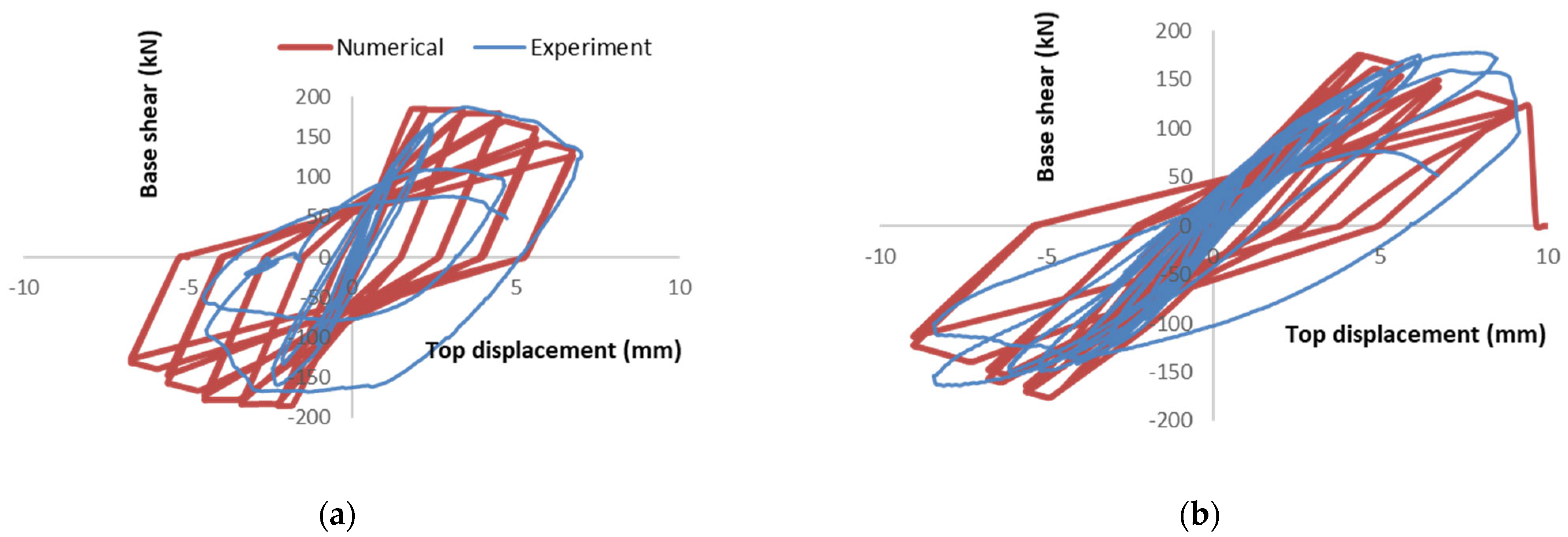
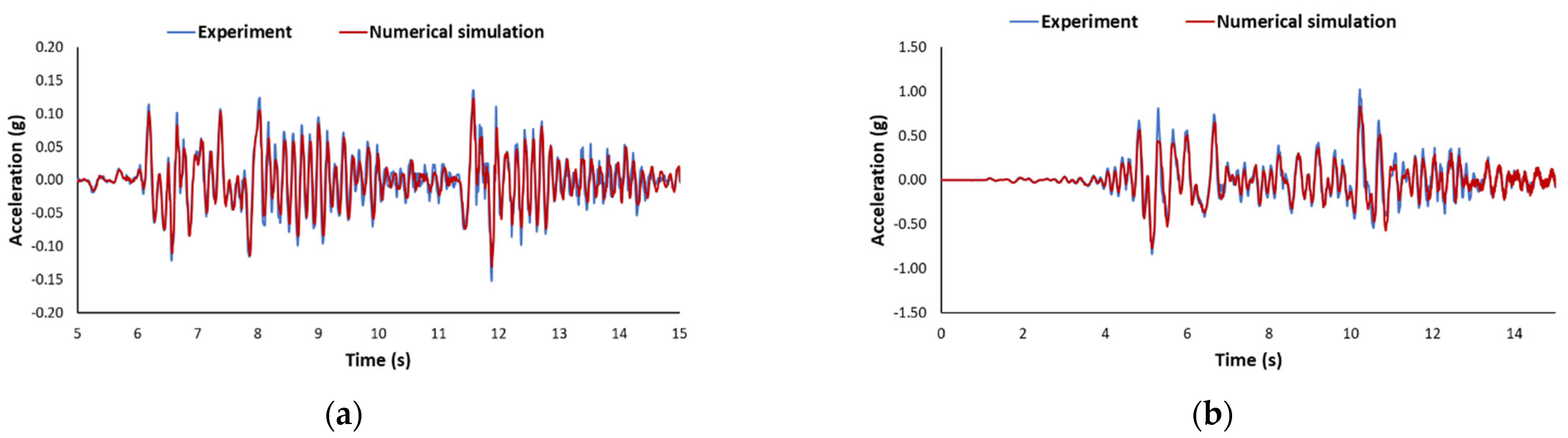
4. Numerical Modelling
4.1. Complete Numerical Modelling
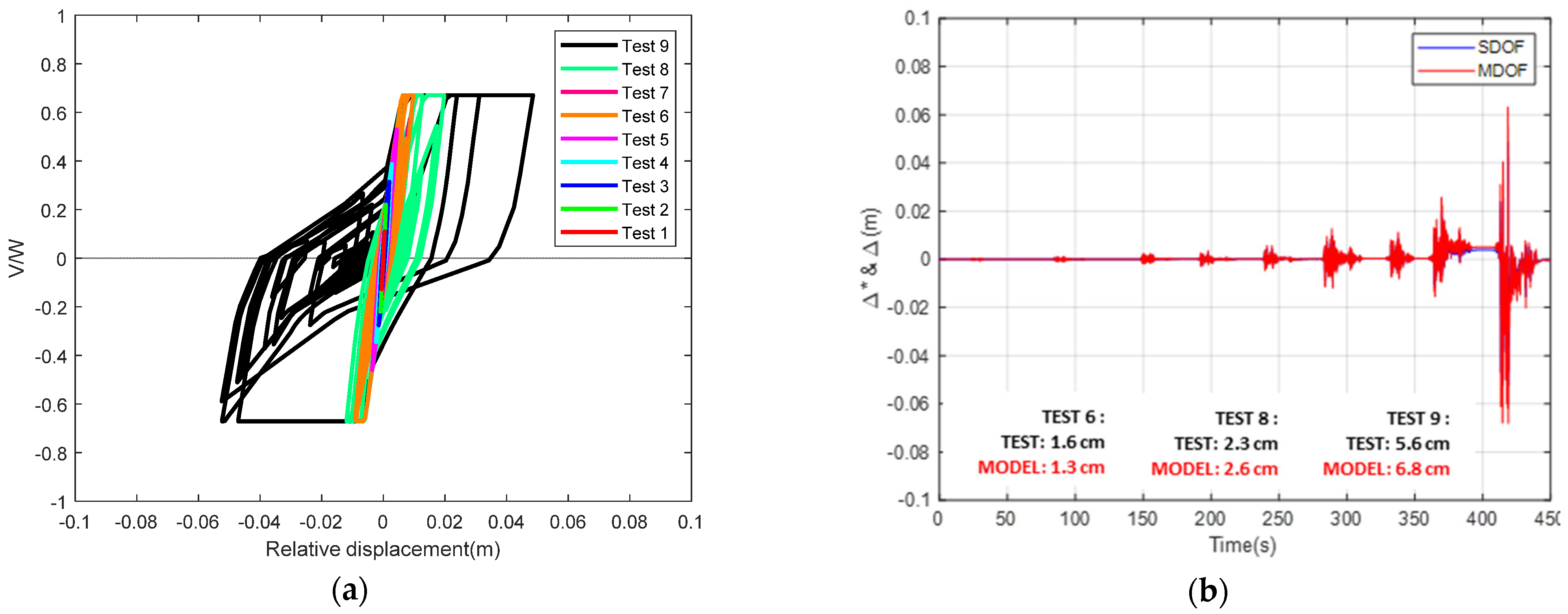
4.2. Simplified Numerical Modelling
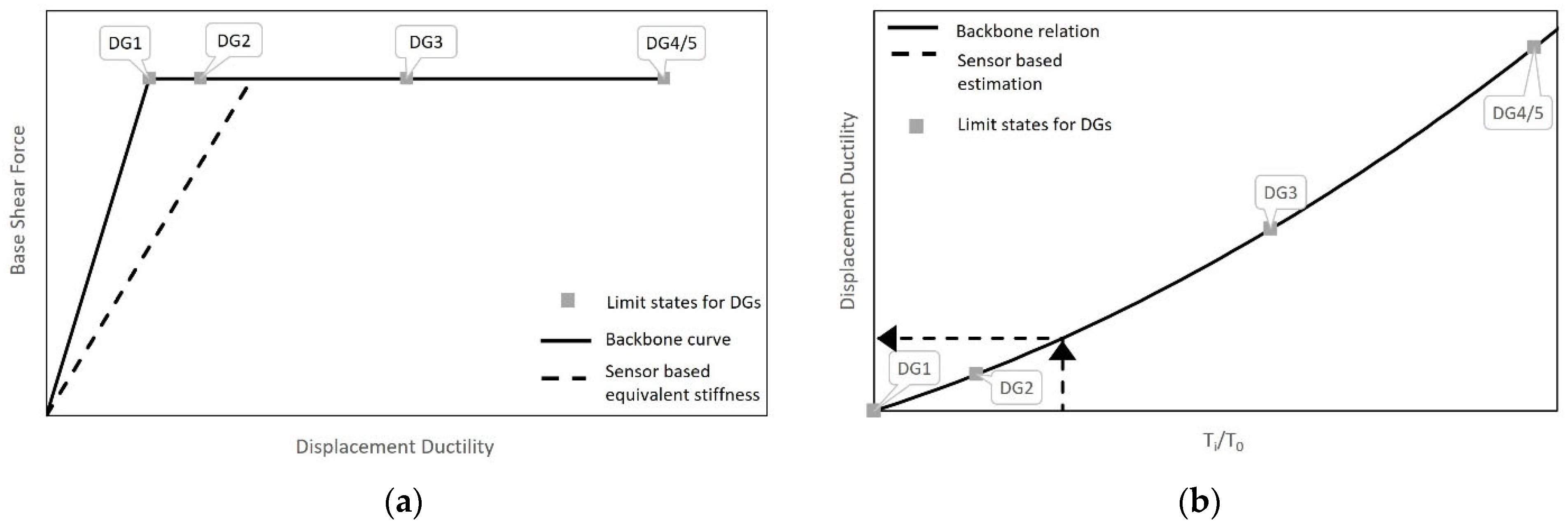
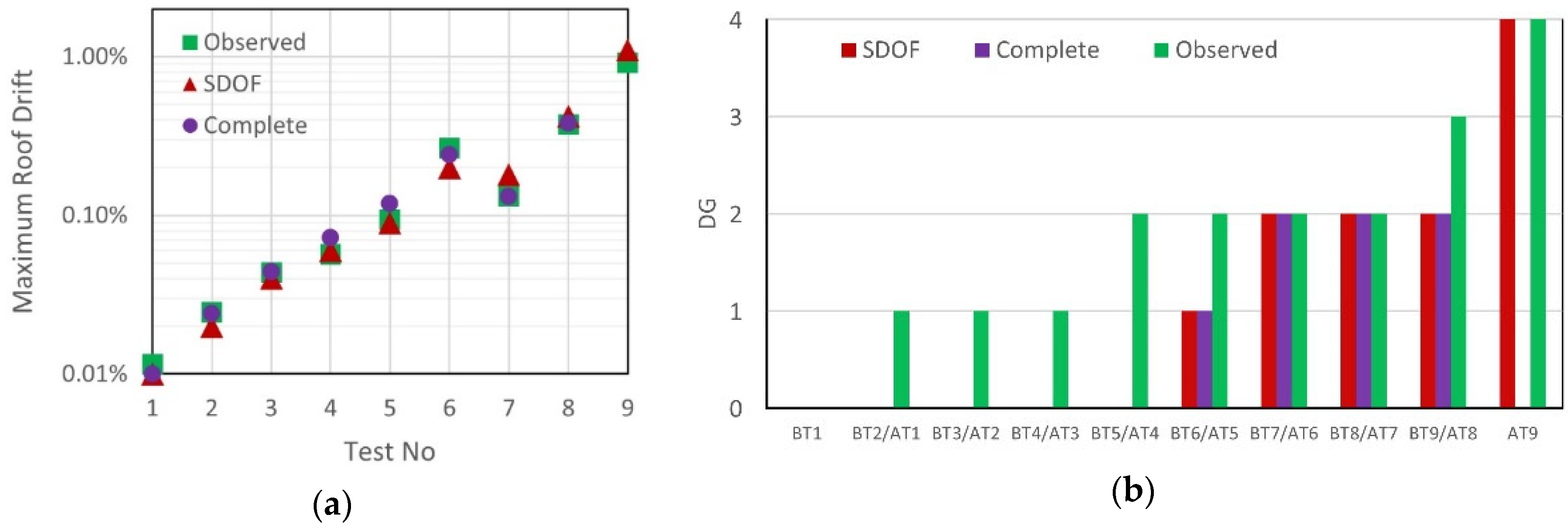
4.3. Damage Estimation through Numerical Modelling
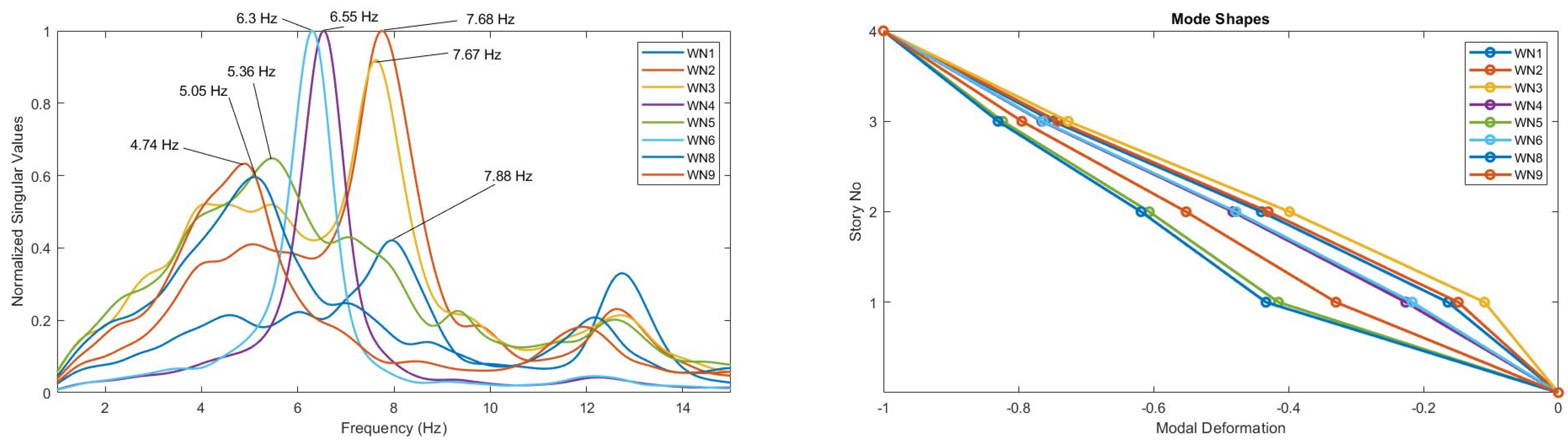
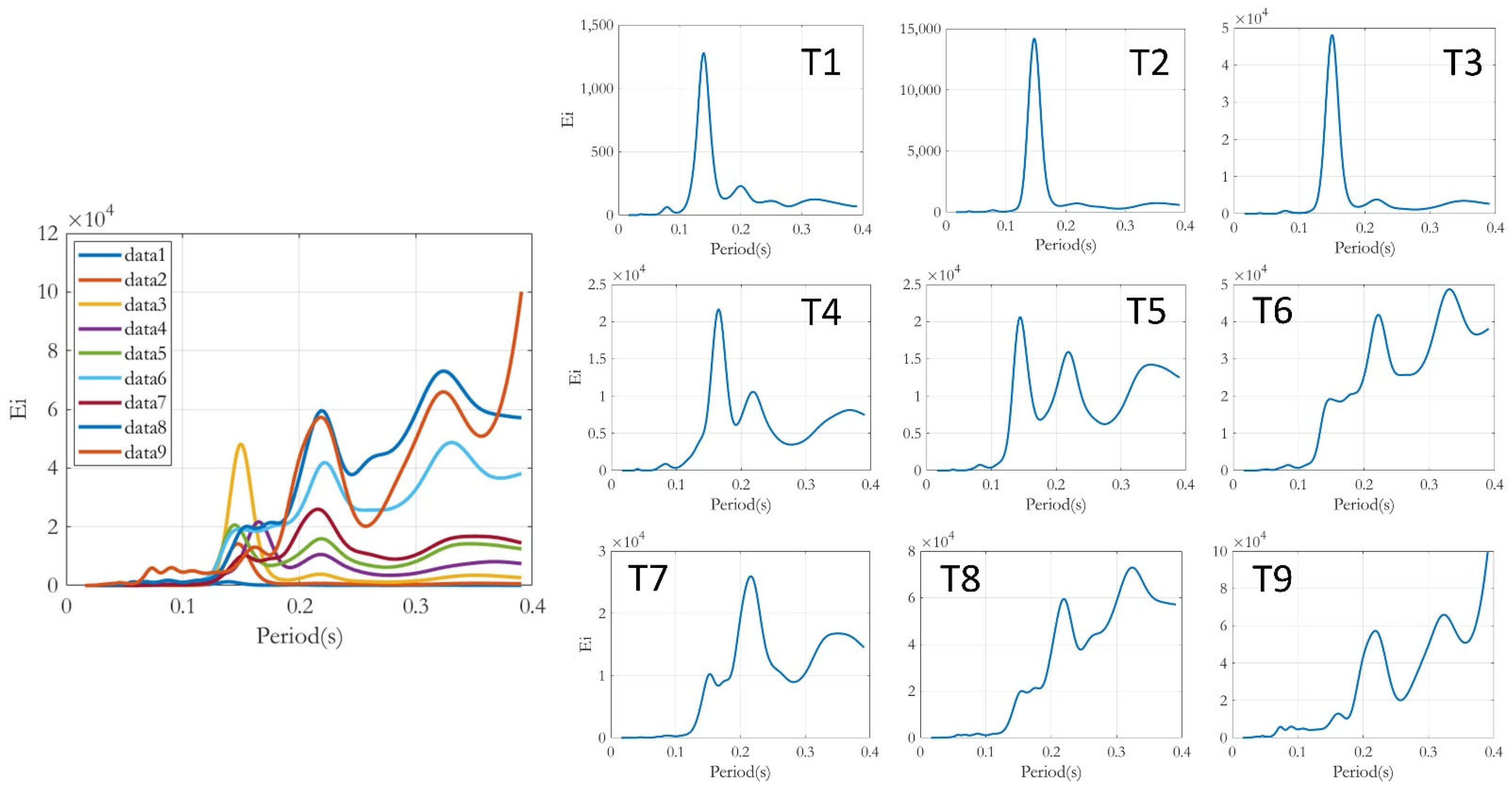
5. Dynamic Identification and Damage Estimation through SHM-Based Approaches
6. Conclusive Remarks
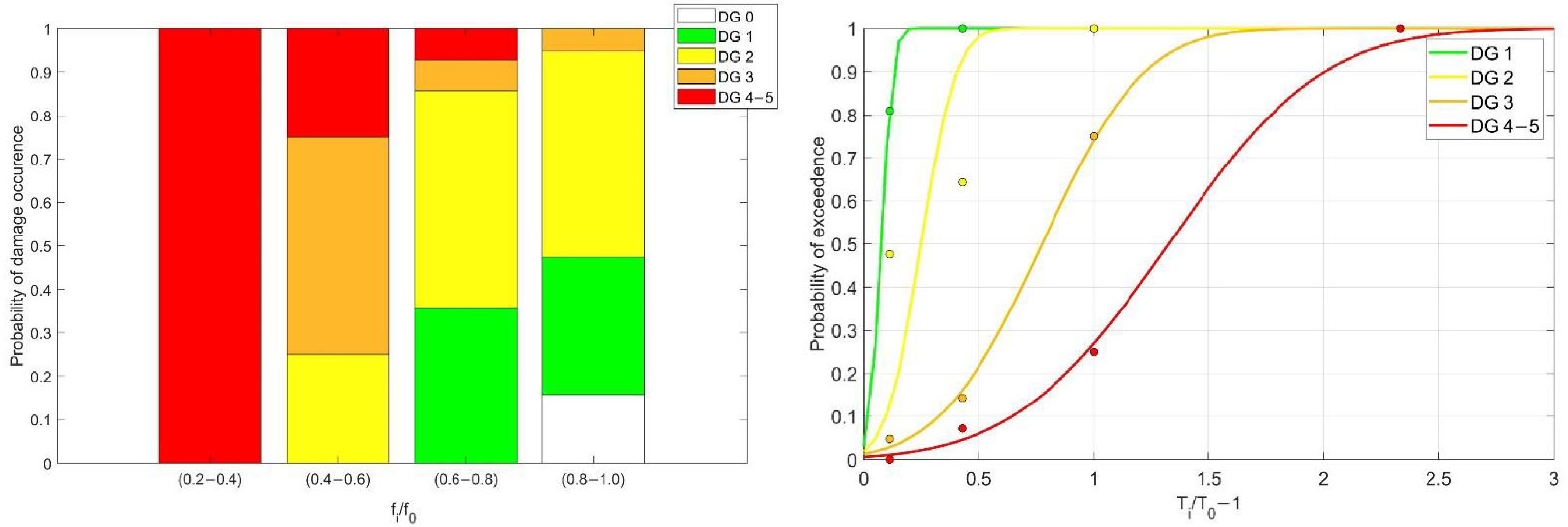
- Different dynamic identification techniques are consistent in detecting the modal frequencies of the building structure decaying in time due to cumulative seismic damage. This consistency is predominantly reflected in the same EMS-98 damage grade estimations being obtained for each technique.
- Among different algorithms used in the system identification process, Continuous Wavelet Transform-based damage estimation performed under the white noise domain gives the most accurate damage grade estimation (which is above 85%). However, when the performance is relaxed such that neighbour predicted damage grades are also deemed acceptable, all techniques return 100% detection accuracy for all of the cases.
- Although estimations with earthquake ground motion (EGM) recordings have relatively lower accuracy compared with white noise, it should be noted that white noise signals are likely unavailable for low-cost accelerometers unless there is a distinct vibration source in the testing vicinity. On the other hand, methods capable of deploying EGM are not affected by noise characteristics and are likely to capture the period elongation even during low-amplitude seismic events.
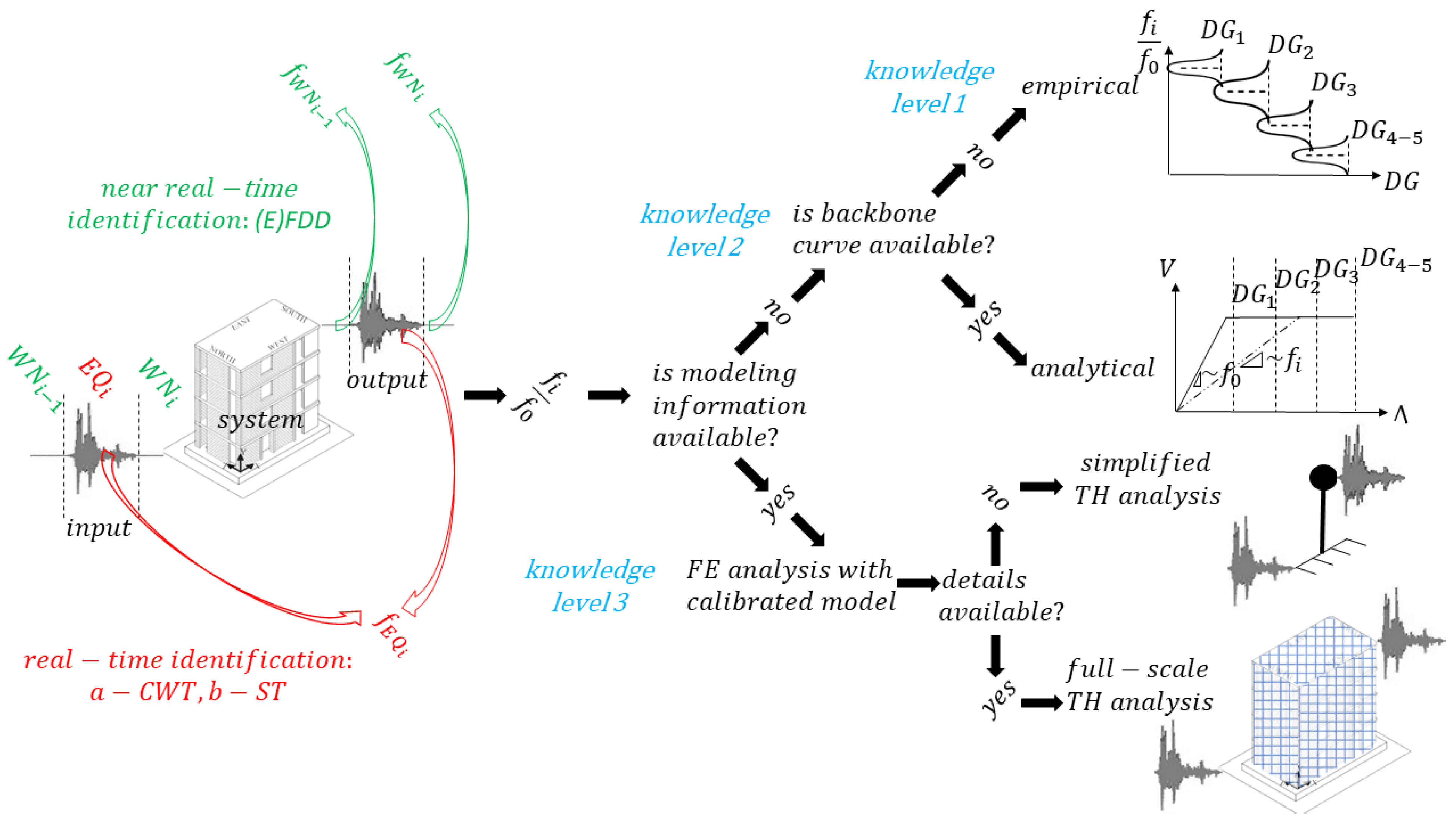
- When empirical, analytical, and numerical methods are compared, it is observed that even the KL1 compatible empirical approach performed acceptably well. This constitutes an important practical outcome, as KL1 is the level of knowledge that is most likely to be present for future potential applications. The KL2 compatible analytical method was found to be more consistent with the empirical method since the methods did not show significant variations in terms of their predictive performances. It is noteworthy that although the developed numerical models do not provide any further improvement of accuracy with respect to the analytical method, they could still be required for loss assessment, which requires an estimate of the demand imposed by the earthquake on structural and non-structural components.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Federal Emergency Management Agency (US) (Ed.) Rapid Visual Screening of Buildings for Potential Seismic Hazards: A Handbook; Government Printing Office: Redwood City, CA, USA, 2017.
- De Martino, G.; Di Ludovico, M.; Prota, A.; Moroni, C.; Manfredi, G.; Dolce, M. Estimation of repair costs for RC and masonry residential buildings based on damage data collected by post-earthquake visual inspection. Bull. Earthq. Eng. 2017, 15, 1681–1706. [Google Scholar] [CrossRef]
- Kaplan, O.; Kaplan, G. Response Spectra-Based Post-Earthquake Rapid Structural Damage Estimation Approach Aided with Remote Sensing Data: 2020 Samos Earthquake. Buildings 2021, 12, 14. [Google Scholar] [CrossRef]
- Zhu, Z.; German, S.; Brilakis, I. Visual retrieval of concrete crack properties for automated post-earthquake structural safety evaluation. Autom. Constr. 2011, 20, 874–883. [Google Scholar] [CrossRef]
- Dabove, P.; Di Pietra, V.; Lingua, A.M. Close range photogrammetry with tablet technology in post-earthquake scenario: Sant’Agostino church in Amatrice. GeoInformatica 2018, 22, 463–477. [Google Scholar] [CrossRef]
- Dominici, D.; Alicandro, M.; Massimi, V. UAV photogrammetry in the post-earthquake scenario: Case studies in L’Aquila. Geomat. Nat. Hazards Risk 2017, 8, 87–103. [Google Scholar] [CrossRef] [Green Version]
- Doebling, S.W.; Farrar, C.R.; Prime, M.B.; Shevitz, D.W. Damage Identification and Health Monitoring of Structural and Mechanical Systems from Changes in Their Vibration Characteristics: A Literature Review (No. LA-13070-MS); Los Alamos National Lab: Los Alamos, NM, USA, 1996. [Google Scholar] [CrossRef] [Green Version]
- Rytter, A. Vibrational Based Inspection of Civil Engineering Structures. Ph.D. Thesis, Aalborg University, Aalborg, Denmark, 1993. [Google Scholar]
- Uma, S.R. Seismic instrumentation of buildings-A promising step for performance based design in New Zealand. In Proceedings of the NZSEE Conference Proceedings, Palmerston North, New Zealand, 30 March–1 April 2007. [Google Scholar]
- Porter, K.; Mitrani-Reiser, J.; Beck, J.L. Near-real-time loss estimation for instrumented buildings. Struct. Des. Tall Spec. Build. 2006, 15, 3–20. [Google Scholar] [CrossRef]
- Cremen, G.; Baker, J.W. Quantifying the benefits of building instruments to FEMA P-58 rapid post-earthquake damage and loss predictions. Eng. Struct. 2018, 176, 243–253. [Google Scholar] [CrossRef]
- Tubaldi, E.; Ozer, E.; Douglas, J.; Gehl, P. Examining the contribution of near real-time data for rapid seismic loss assessment of structures. Struct. Health Monit. 2021, 21, 118–137. [Google Scholar] [CrossRef]
- Hwang, S.-H.; Lignos, D.G. Nonmodel-based framework for rapid seismic risk and loss assessment of instrumented steel buildings. Eng. Struct. 2018, 156, 417–432. [Google Scholar] [CrossRef] [Green Version]
- Reuland, Y.; Lestuzzi, P.; Smith, I.F.C. Measurement-based support for post-earthquake assessment of buildings. Struct. Infrastruct. Eng. 2019, 15, 647–662. [Google Scholar] [CrossRef] [Green Version]
- Goulet, J.A.; Michel, C.; Der Kiureghian, A. Data-driven post-earthquake rapid structural safety assessment. Earthq. Eng. Struct. Dyn. 2015, 44, 549–562. [Google Scholar] [CrossRef] [Green Version]
- Schwarz, J.; Abrahamczyk, L.; Hadidiam, N.; Haweyon, M.; Kaufmann, C. Deliverable D4.1—Report on Knowledge-Based Exposure Modelling Framework Depending on the Accuracy and Completeness of Available Data. EU H2020 TURNkey Project Deliverable. 2021. Available online: https://earthquake-turnkey.eu/deliverables-2/ (accessed on 25 March 2022).
- Grunthal, G. (Ed.) European Macroseismic Scale; Chaiers du Centre Européen de Géodynamique et de Séismologie: Luxembourg, 1998; Volume 15. [Google Scholar]
- Brincker, R.; Ventura, C.E.; Andersen, P. Damping estimation by frequency domain decomposition. In Proceedings of the 19th Int’l Modal Analysis Conference (IMAC), Kissimmee, FL, USA, 5–8 February 2001; pp. 698–703. [Google Scholar]
- Brincker, R.; Zhang, L.; Andersen, P. Modal identification of output-only systems using frequency domain decomposition. Smart Mater. Struct. 2001, 10, 441–445. [Google Scholar] [CrossRef] [Green Version]
- Hasan, M.D.A.; Ahmad, Z.A.B.; Leong, M.S.; Hee, L.M. Enhanced frequency domain decomposition algorithm: A review of a recent development for unbiased damping ratio estimates. J. Vibroeng. 2018, 20, 1919–1936. [Google Scholar] [CrossRef]
- Stockwell, R.G.; Mansinha, L.; Lowe, R.P. Localization of the complex spectrum: The S transform. IEEE Trans. Signal Process. 1996, 44, 998–1001. [Google Scholar] [CrossRef]
- Ditommaso, R.; Mucciarelli, M.; Parolai, S.; Picozzi, M. Monitoring the structural dynamic response of a masonry tower: Comparing classical and time-frequency analyses. Bull. Earthq. Eng. 2012, 10, 1221–1235. [Google Scholar] [CrossRef] [Green Version]
- Ditommaso, R.; Ponzo, F.C.; Auletta, G. Damage detection on framed structures: Modal curvature evaluation using Stockwell Transform under seismic excitation. Earthq. Eng. Eng. Vib. 2015, 14, 265–274. [Google Scholar] [CrossRef]
- Pianese, G.; Petrovic, B.; Parolai, S.; Paolucci, R. Identification of the nonlinear seismic response of buildings by a combined Stockwell Transform and deconvolution interferometry approach. Bull. Earthq. Eng. 2018, 16, 3103–3126. [Google Scholar] [CrossRef]
- Stockwell, R.G. Why use the S transform? In Pseudo-Differential Operators: Partial Differential Equations and Time-Frequency Analysis; Rodino, L., Schulze, B.-W., Wong, M.W., Eds.; Fields Institute Communications Series 52; American Mathematical Society: Providence, RI, USA, 2007; pp. 279–309. [Google Scholar]
- Omori, F. The Semi-Destructive Earthquake of April 26; Seismological Notes; Imperial Earthquake Investigation Committee: Tokyo, Japan, 1922; Volume 3, pp. 1–30. [Google Scholar]
- Priestley, M.J.N.; Seible, F.; Calvi, G.M. Seismic Design and Retrofit of Bridges; John Wiley & Sons, Inc.: New York, NY, USA, 1996. [Google Scholar]
- Borzi, B.; Pinho, R.J.S.M.; Crowley, H. Simplified pushover-based vulnerability analysis for large-scale assessment of RC buildings. Eng. Struct. 2008, 30, 804–820. [Google Scholar] [CrossRef]
- Lagomarsino, S.; Giovinazzi, S. Macroseismic and mechanical models for the vulnerability and damage assessment of current buildings. Bull. Earthq. Eng. 2006, 4, 415–443. [Google Scholar] [CrossRef]
- Borzi, B.; Calvi, G.M.; Elnashai, A.; Faccioli, E.; Bommer, J. Inelastic spectra for displacement-based seismic design. Soil Dyn. Earthq. Eng. 2001, 21, 47–61. [Google Scholar] [CrossRef]
- Beyer, K.; Tondelli, M.; Petry, S.; Peloso, S. Dynamic testing of a four-storey building with reinforced concrete and unreinforced masonry walls: Prediction, test results and data set. Bull. Earthq. Eng. 2015, 13, 3015–3064. [Google Scholar] [CrossRef] [Green Version]
- Tondelli, M.; Petry, S.; Beyer, K. Seismic Behaviour of Mixed Reinforced Concrete—Unreinforced Masonry Wall Structures; TREES Laboratory, EUCENTRE: Pavia, Italy, 2013. [Google Scholar]
- Tondelli, M.; Petry, S.; Peloso, S.; Beyer, K. Dynamic Testing of a Four-Storey Building with Reinforced Concrete and Unreinforced Masonry Wall: Data Set. 2014. Available online: https://zenodo.org/record/11578 (accessed on 25 March 2022).
- Tondelli, M.; Beyer, K.; DeJong, M. Influence of boundary conditions on the out-of-plane response of brick masonry walls in buildings with RC slabs. Earthq. Eng. Struct. Dyn. 2016, 45, 1337–1356. [Google Scholar] [CrossRef] [Green Version]
- Seismosoft. SeismoStruct 2021—A Computer Program for Static and Dynamic Nonlinear Analysis of Framed Structures. 2021. Available online: www.seismosoft.com (accessed on 29 March 2022).
- Ibarra, L.F.; Medina, R.A.; Krawinkler, H. Hysteretic models that incorporate strength and stiffness deterioration. Earthq. Eng. Struct. Dyn. 2005, 34, 1489–1511. [Google Scholar] [CrossRef]
- Mander, J.B.; Priestley, M.J.N.; Park, R. Theoretical Stress-Strain Model for Confined Concrete. J. Struct. Eng. 1988, 114, 1804–1826. [Google Scholar] [CrossRef] [Green Version]
- Martínez-Rueda, J.E.; Elnashai, A.S. Confined concrete model under cyclic load. Mater. Struct. 1997, 30, 139–147. [Google Scholar] [CrossRef]
- Madas, P. Advanced Modelling of Composite Frames Subjected to Earthquake Loading. Ph.D. Thesis, Imperial College, University of London, London, UK, 1993. [Google Scholar]
- Menegotto, M.; Pinto, P.E. Method of analysis for cyclically loaded R.C. plane frames including changes in geometry and non-elastic behaviour of elements under combined normal force and bending. In Proceedings of the Symposium on the Resistance and Ultimate Deformability of Structures Acted on by Well Defined Repeated Loads, International Association for Bridge and Structural Engineering, Zurich, Switzerland, June 1973; pp. 15–22. [Google Scholar] [CrossRef]
- Filippou, F.C.; Popov, E.P.; Bertero, V.V. Effects of Bond Deterioration on Hysteretic Behaviour of Reinforced Concrete Joints; Report EERC 83-19; Earthquake Engineering Research Center, University of California: Berkeley, CA, USA, 1983. [Google Scholar]
- Petry, S.; Beyer, K. Scaling unreinforced masonry for reduced-scale seismic testing. Bull. Earthq. Eng. 2014, 12, 2557–2581. [Google Scholar] [CrossRef] [Green Version]
- Petry, S.; Beyer, K. Cyclic Test Data of Six Unreinforced Masonry Walls with Different Boundary Conditions. Earthq. Spectra 2015, 31, 2459–2484. [Google Scholar] [CrossRef] [Green Version]
- Mwafy, M.; Elnashai, A.S. Static pushover versus dynamic collapse of RC buildings. Eng. Struct. 2001, 23, 407–424. [Google Scholar] [CrossRef]
- Louzai, A.; Abed, A. Evaluation of the seismic behavior factor of reinforced concrete frame structures based on comparative analysis between non-linear static pushover and incremental dynamic analyses. Bull. Earthq. Eng. 2015, 13, 1773–1793. [Google Scholar] [CrossRef]
- Tran, T.T.X.; Ozer, E. Automated and Model-Free Bridge Damage Indicators with Simultaneous Multiparameter Modal Anomaly Detection. Sensors 2020, 20, 4752. [Google Scholar] [CrossRef]
- Tran, T.T.; Ozer, E. Synergistic bridge modal analysis using frequency domain decomposition, observer Kalman filter identification, stochastic subspace identification, system realization using information matrix, and autoregressive exogenous model. Mech. Syst. Signal Process. 2021, 160, 107818. [Google Scholar] [CrossRef]
- Tiganescu, A.; Grecu, B.; Neagoe, C.; Toma-Danila, D.; Tataru, D.; Ionescu, C.; Balan, S.F. PREVENT—An Integrated Multi-Sensor System for Seismic Monitoring of Civil Structures. Rom. Rep. Phys. 2021, 73. Available online: http://www.rrp.infim.ro/IP/AP599.pdf (accessed on 29 March 2022).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
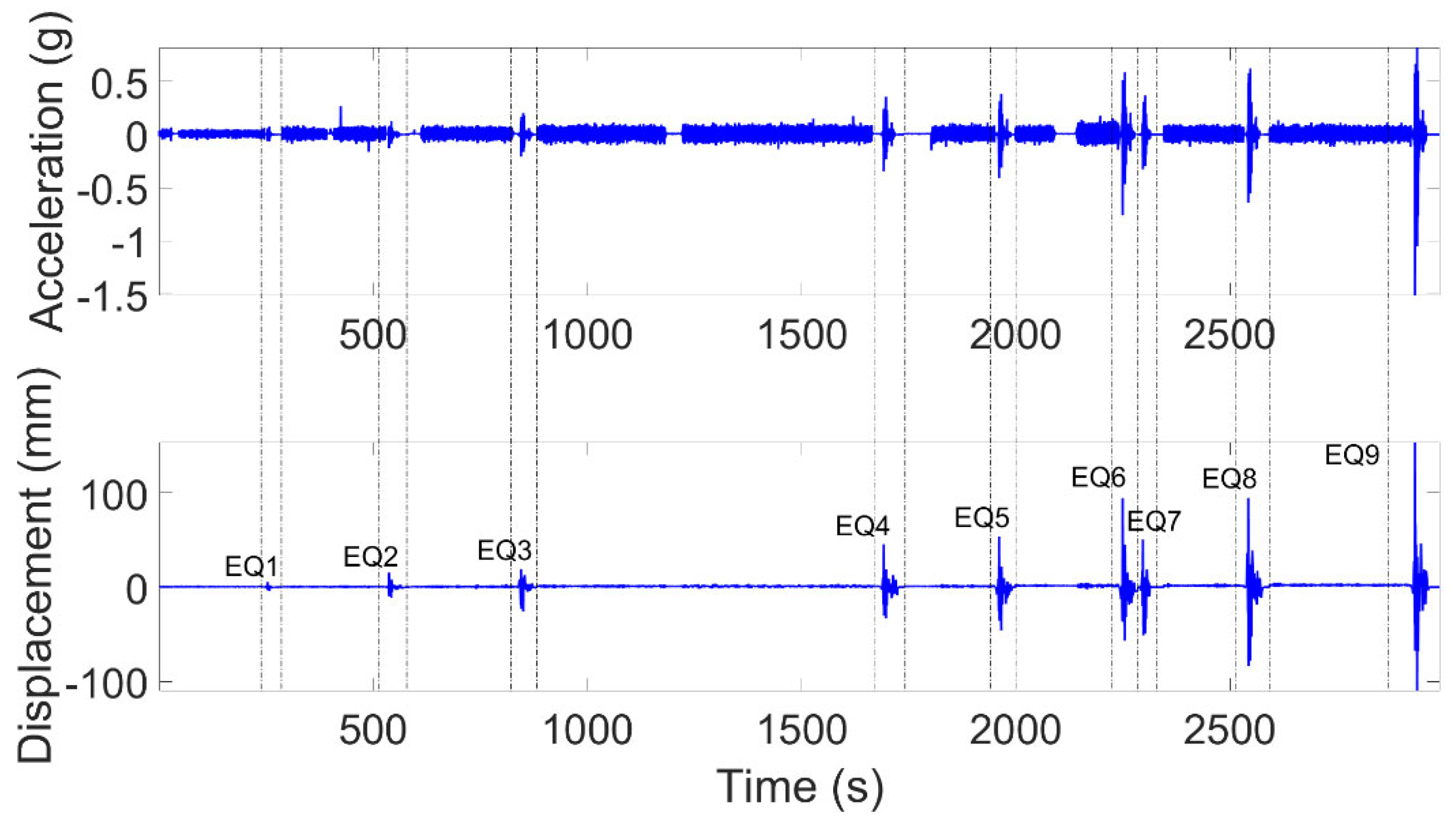
| Test No (EQ) | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|
| PGA (g) | 0.08 | 0.13 | 0.21 | 0.36 | 0.41 | 0.76 | 0.37 | 0.64 | 1.52 |
| EMS-98 Damage Grade | 1 | 1 | 1 | 2 | 2 | 2 | 2 | 3 | 4–5 |
| Residual Drift Ratio (%) | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.29 |
| Tr. Drift Ratio, Interstorey (%) | 0.03 | 0.04 | 0.08 | 0.08 | 0.13 | 0.33 | 0.18 | 0.47 | 1.39 |
| Tr. Drift Ratio, Roof (%) | 0.01 | 0.02 | 0.04 | 0.06 | 0.09 | 0.27 | 0.13 | 0.37 | 0.91 |
| Parameter | Definition | Value |
|---|---|---|
| W* | Modal weight | 581,400 N |
| F*y | SDOF yield strength | 390,000 N |
| d*y | SDOF yield displacement | 0.006 m |
| F*y/F*cr | The ratio of yield strength to cracking force | 3 |
| kpl | Kinematic hardening ratio | 0 |
| ky/kcr | The ratio of cracked stiffness to uncracked stiffness | 0.45 |
| Beyer et al. (2015) | (E)FDD | CWT-WN | CWT-Tail | ST-GM | |
|---|---|---|---|---|---|
| BT1 | 0.13 | 0.13 | 0.12 | 0.12 * | 0.13 |
| AT1 or BT2 | 0.13 | 0.13 | 0.13 | 0.14 | 0.13 |
| AT2 or BT3 | 0.13 | 0.13 | 0.13 | 0.15 | 0.14 |
| AT3 or BT4 | 0.15 | 0.15 | 0.15 | 0.15 | 0.15 |
| AT4 or BT5 | 0.16 | 0.18 | 0.17 | 0.15 | 0.15 |
| AT5 or BT6 | 0.17 | 0.16 | 0.16 | 0.14 | 0.15 |
| AT6 or BT7 | N/A | N/A | N/A | 0.27 | 0.19 |
| AT7 or BT8 | 0.19 | 0.21 | 0.19 | 0.22 | 0.18 |
| AT8 or BT9 | 0.21 | 0.20 | 0.20 | 0.32 | 0.20 |
| AT9 | N/A | N/A | N/A | 0.39 | 0.48 |
| Identification Techniques | ||||||
| Test Sequence | Time Required | (E)FDD | CWT + WN | CWT + Tail | ST-GM | |
| Method 1 (Empirical) | 1 to 9 | A few seconds | 3/7 (7/7) | 6/7 (7/7) | 5/9 (9/9) | 4/9 (9/9) |
| 6 to 9 | 1/2 (2/2) | 1/2 (2/2) | 2/4 (4/4) | 3/4 (4/4) | ||
| Method 2 (Analytical) | 1 to 9 | A few seconds | 4/7 (7/7) | 5/7 (7/7) | 4/9 (9/9) | 5/9 (9/9) |
| 6 to 9 | 1/2 (2/2) | 1/2 (2/2) | 2/4 (4/4) | 3/4 (4/4) | ||
| Modelling Techniques | ||||||
| Test Sequence | Time Required | SDOF | Complete | |||
| Method 3 (Numerical) | 1 to 9 | SDOF: About one minute | 3/9 (8/9) | 2/8 (8/8) | ||
| 6 to 9 | Complete: Minutes to tens of minutes | 3/4 (4/4) | 2/3 (3/3) | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ozer, E.; Özcebe, A.G.; Negulescu, C.; Kharazian, A.; Borzi, B.; Bozzoni, F.; Molina, S.; Peloso, S.; Tubaldi, E. Vibration-Based and Near Real-Time Seismic Damage Assessment Adaptive to Building Knowledge Level. Buildings 2022, 12, 416. https://doi.org/10.3390/buildings12040416
Ozer E, Özcebe AG, Negulescu C, Kharazian A, Borzi B, Bozzoni F, Molina S, Peloso S, Tubaldi E. Vibration-Based and Near Real-Time Seismic Damage Assessment Adaptive to Building Knowledge Level. Buildings. 2022; 12(4):416. https://doi.org/10.3390/buildings12040416
Chicago/Turabian StyleOzer, Ekin, Ali Güney Özcebe, Caterina Negulescu, Alireza Kharazian, Barbara Borzi, Francesca Bozzoni, Sergio Molina, Simone Peloso, and Enrico Tubaldi. 2022. "Vibration-Based and Near Real-Time Seismic Damage Assessment Adaptive to Building Knowledge Level" Buildings 12, no. 4: 416. https://doi.org/10.3390/buildings12040416