
Field Work’s Optimization for the Digital Capture of Large University Campuses, Combining Various Techniques of Massive Point Capture


Abstract
:1. Introduction
2. Digital Survey of Large Urban Areas in a Short Time, Study Cases
3. Methods and Materials
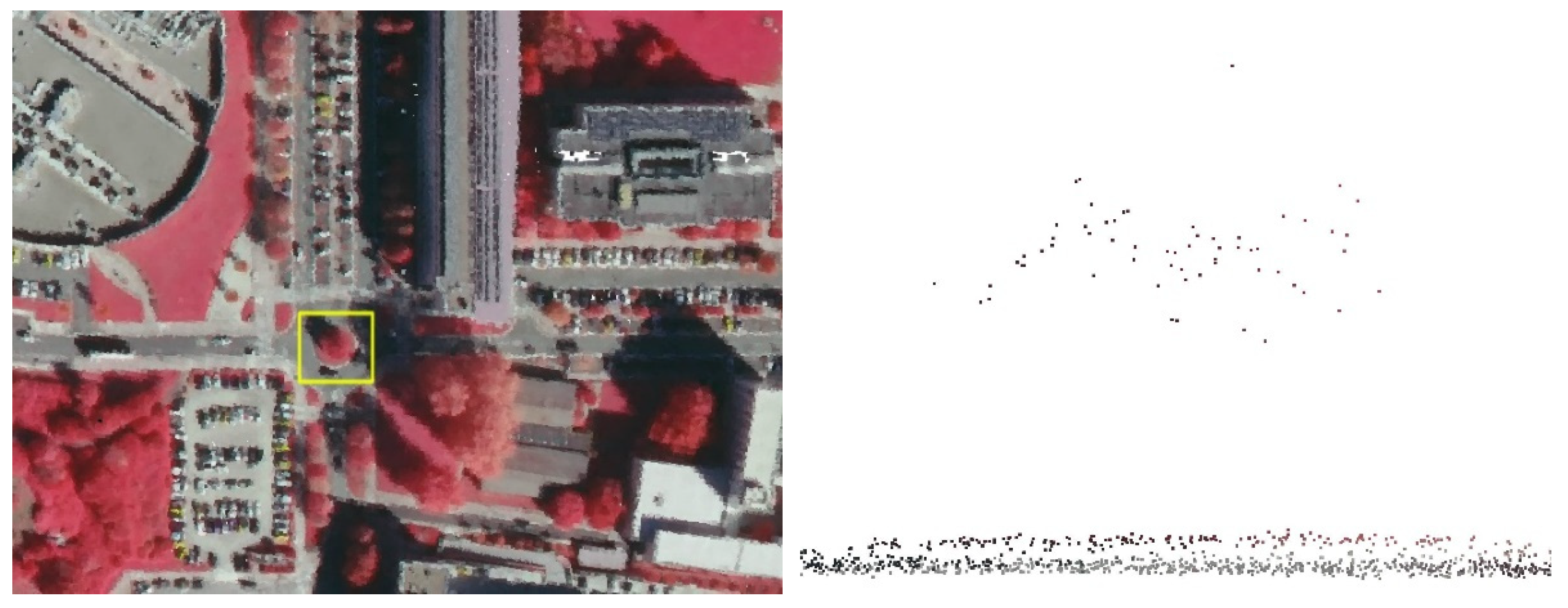
3.1. Analysis of LiDAR Clouds Obtained by Public Services
3.2. Data Collection to Complete the LiDAR, MLS and TLS Clouds
3.2.1. Survey of Control Points in UTM Coordinates Using a Total Station
- Link checkpoints, for joining point clouds corresponding to the different laser scans. Located on vertical walls of the façade and meant to cover the maximum possible width, both vertically and horizontally. Some of these control points, if located on vertical roof faces, can help facilitate the union between the data captured by laser scanner and the UAV-assisted photographic capture;
- Checkpoints on the roof, the topographical targets that we usually place to give more precision to the photogrammetric work of the UAV in relation to the work of the laser scanner. We placed them at the ends of the roofs at different heights (especially on the campus buildings that had flat roofs with several volumes of different heights). That way some targets are captured by the 3D laser scanner and by the UAV, and this facilitates the union between points clouds;
- Checkpoints on the ground, common to both data collection procedures for later integration. Situated in such a way that they are recorded by both laser scanning and UAV-assisted photographic capture.
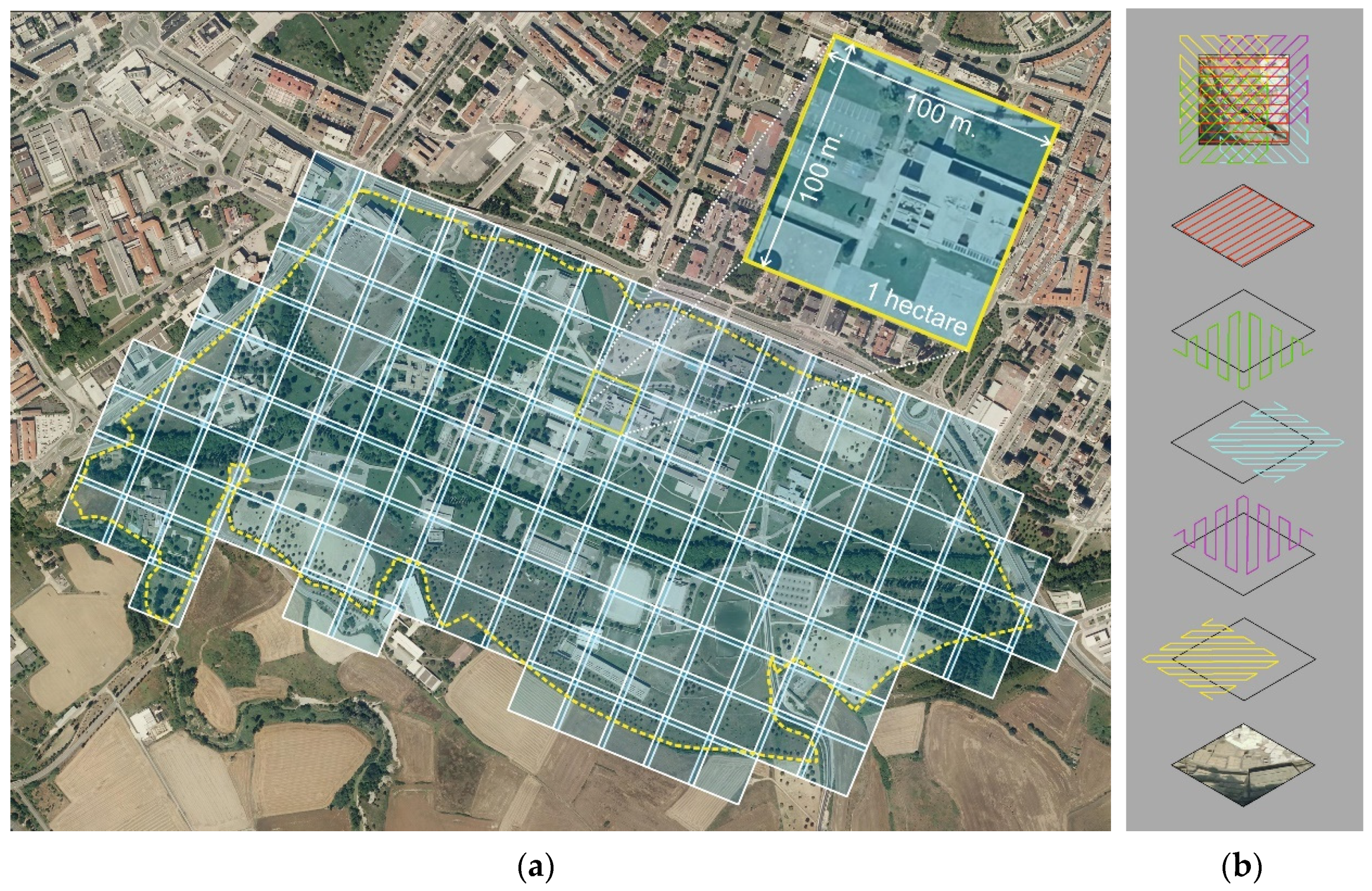
3.2.2. Scanning Plan
- The exterior survey of each campus’s buildings, both in cloud format and in a 360° image, to obtain a multitude of data so that the 3D simulation model could be created from the office without having to venture into the field;
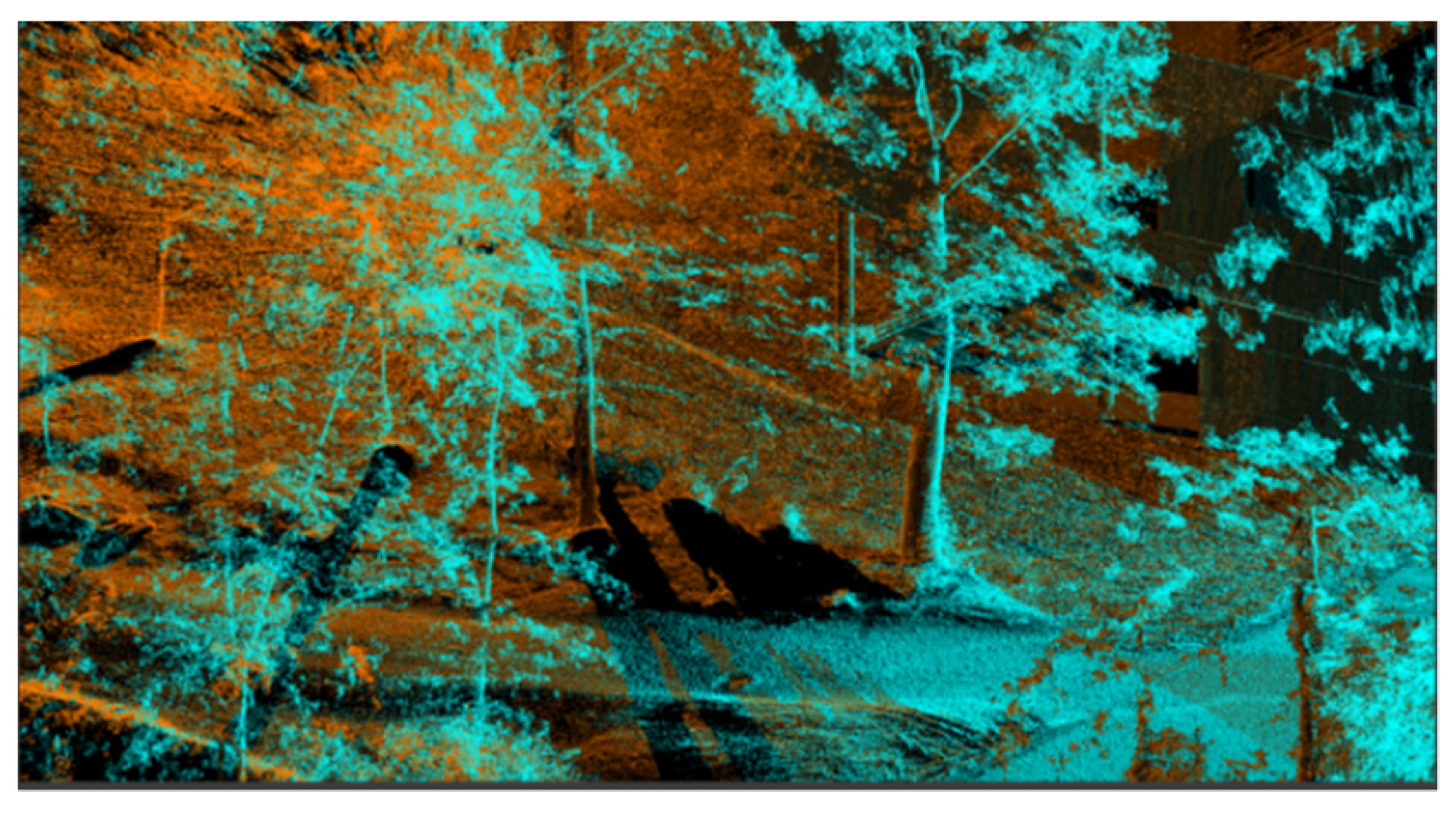
- Registration of the buildings’ external environment, where the main aim focused on capturing the green areas with more or less trees, to record and measure the amount of available forest Biomass.
3.2.3. Laser Scanning, Pre-Processed in the Field with Mobile Devices
3.2.4. Information Processing—Point Clouds, 360° Images
3.2.5. Results and Reports
3.2.6. Visualization—Obtaining Data to Feed the Model
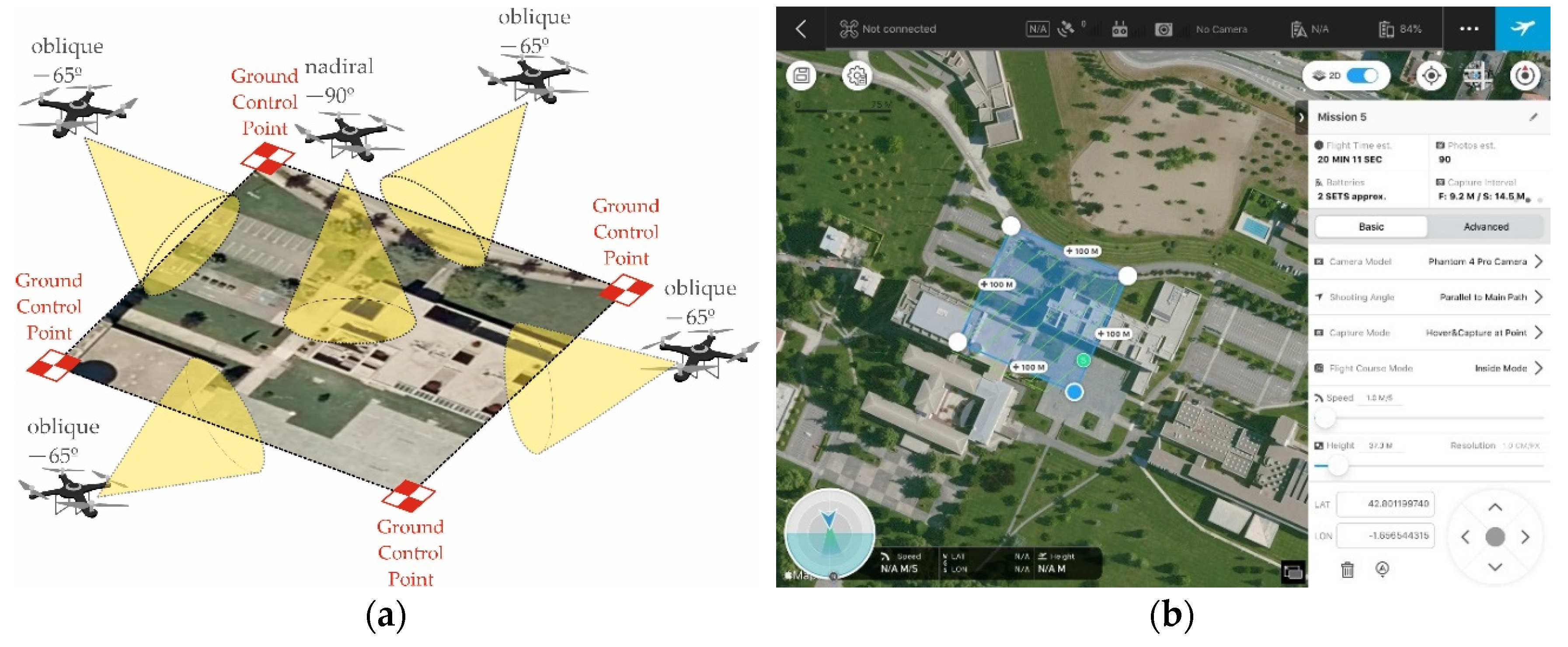
3.3. Capture by UAV and Structure from Motion (SfM) Photogrammetric Processing
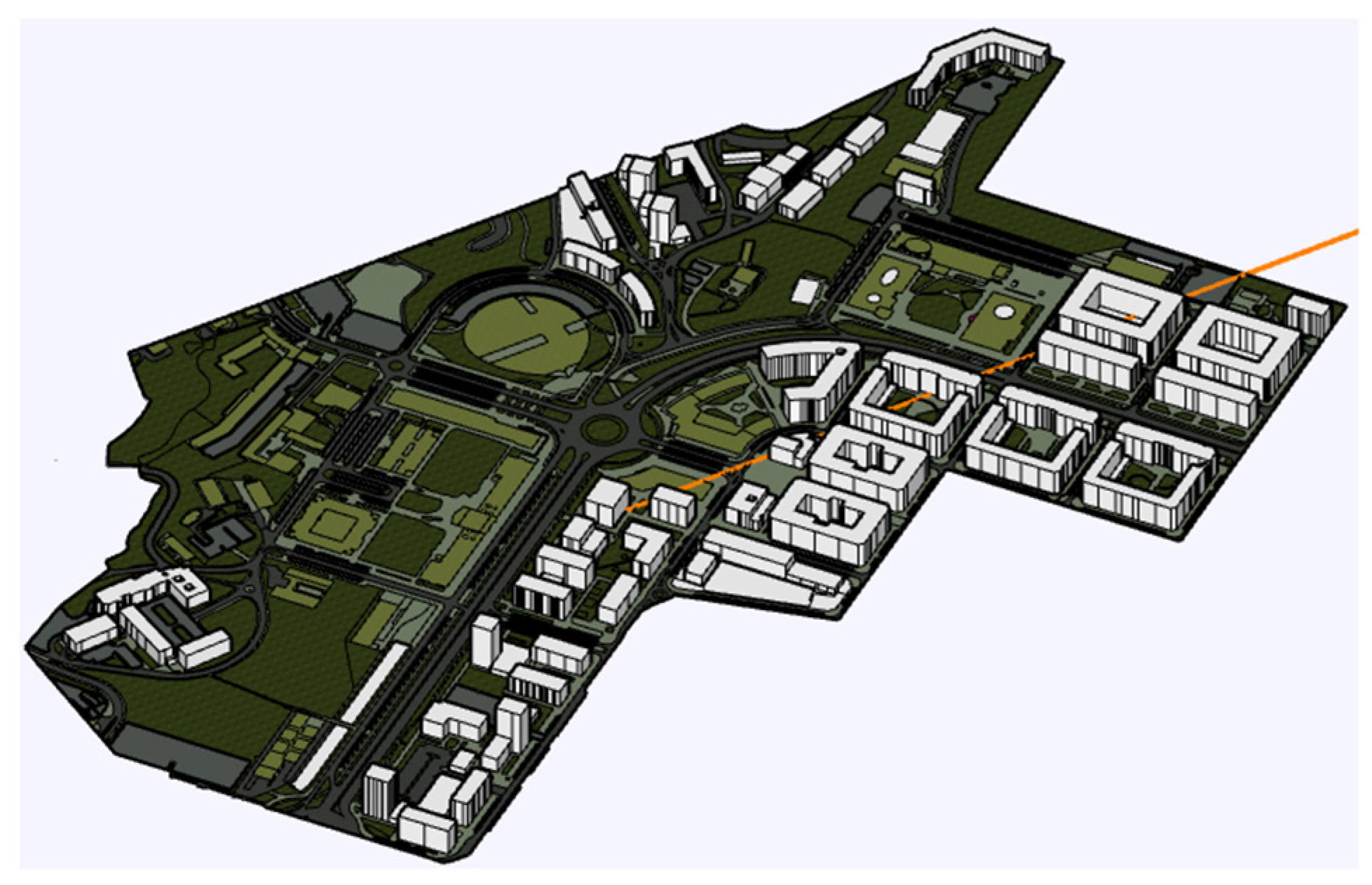
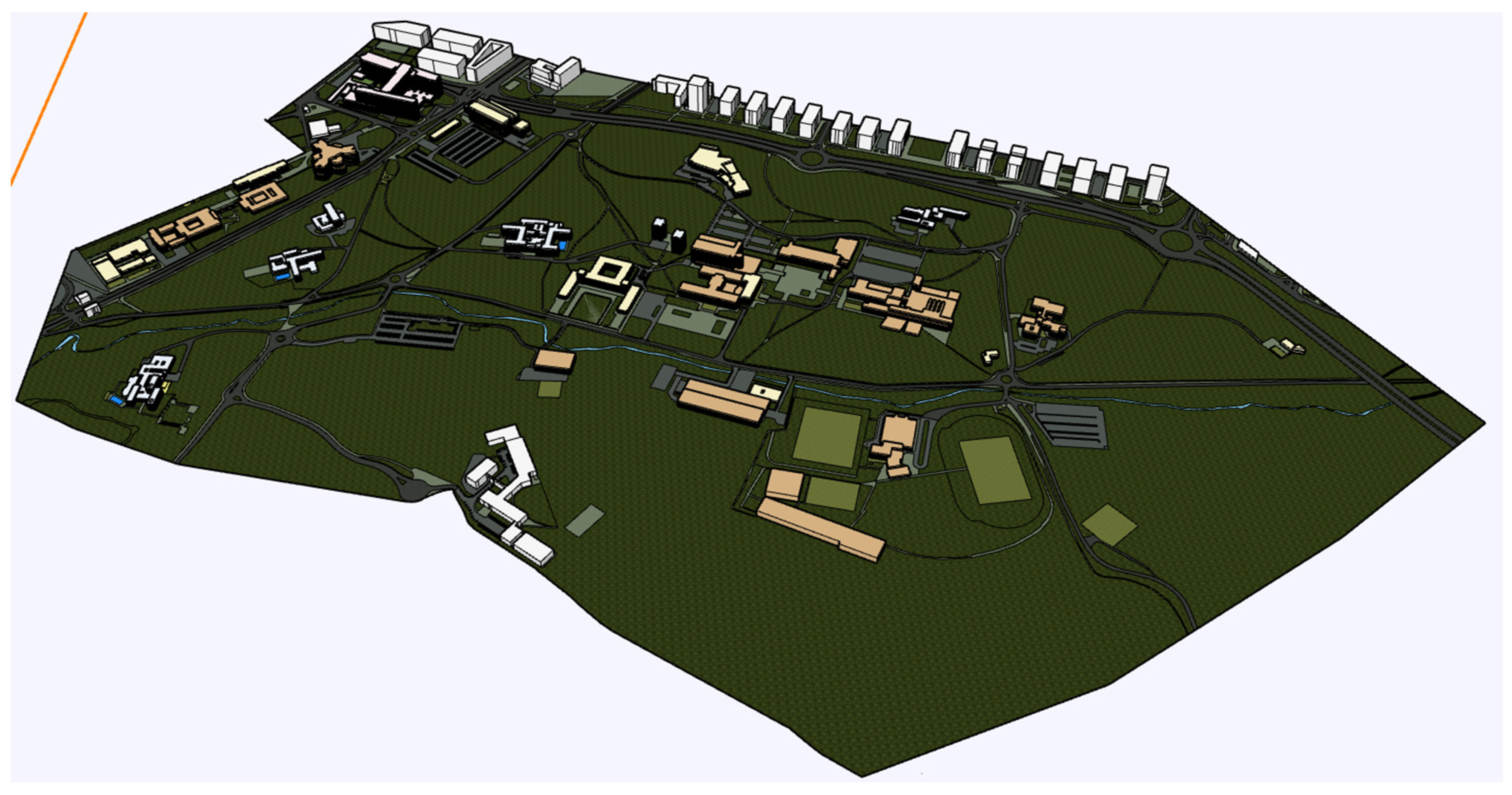
3.4. Modeling and NEST-Sketchup
- Model from the plan, take measurements from the 360 image with the cloud superimposed, create the buildings first and then the rest of the urban layout;
- Model from the points cloud inserted in Sketchup, which is a faster process.
3.5. Materials for Method
3.5.1. Material Resources Required
3.5.2. Software and Hardware
4. Results
4.1. ALS LiDAR Clouds
4.2. TLS LiDAR Clouds
4.3. Capture by UAV and SfM Photogrammetric Processing
4.4. Modeling
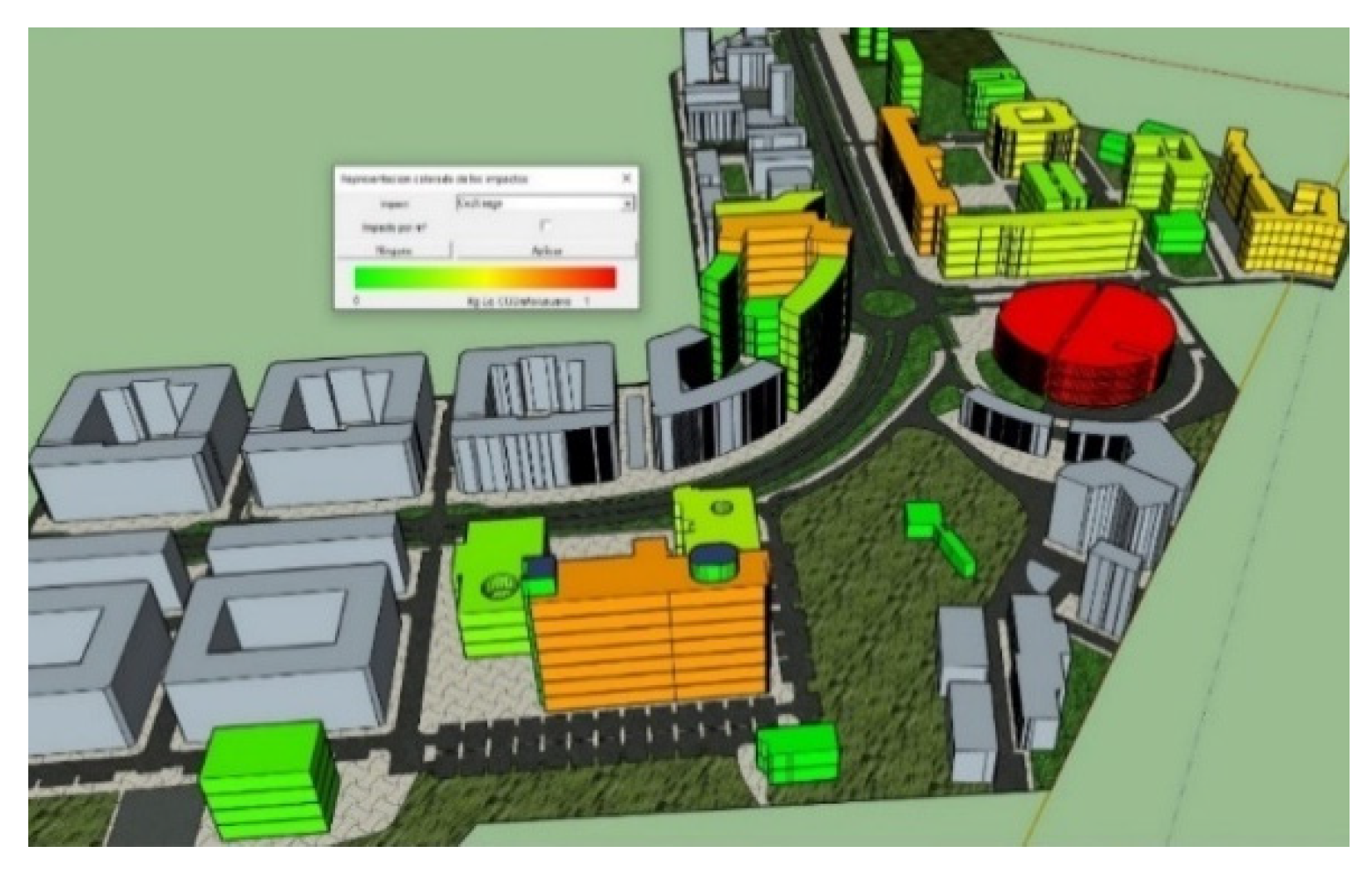
4.5. NEST—Environmental Assessment Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A



References
- Anastaselos, D.; Oxizidis, S.; Manoudis, A. Environmental performance of energy systems of residential buildings: Toward sustainable communities. Sustain. Cities Soc. 2016, 20, 96–108. [Google Scholar] [CrossRef]
- IPCC. Climate Change 2014: Synthesis Report; Contribution of Working Groups I, II and III to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; IPCC: Geneva, Switzerland, 2015. [Google Scholar]
- Pinto, J.F.; da Graça, G.C. Comparison between geothermal district heating and deep energy refurbishment of residential building districts. Sustain. Cities Soc. 2018, 38, 309–324. [Google Scholar] [CrossRef]
- World Economic Forum. Shaping the Future of Construction. 2016, p. 5. Available online: https://www3.weforum.org/docs/WEF_Shaping_the_Future_of_Construction_full_report__.pdf (accessed on 14 February 2022).
- Leon, I.; Pérez, J.J.; Senderos, M. Advanced Techniques for Fast and Accurate Heritage Digitisation in Multiple Case Studies. Sustainability 2020, 12, 6068. [Google Scholar] [CrossRef]
- Xabat, O.; Maxime, P.; Lara, M.; Alexandre, E.; Iker, M. Sustainability assessment of three districts in the city of Donostia through the NEST simulation tool. Nat. Res. Forum 2016, 40, 156–168. [Google Scholar]
- Agencia Estatal Boletín Oficial del Estado. Available online: https://www.boe.es/buscar/doc.php?id=BOE-A-2020-3692 (accessed on 14 February 2022).
- Van Aken, J. Management Research Based on the Paradigm of the Design Sciences: The Quest for Field-Tested and Grounded Technological Rules. J. Manag. Stud. 2004, 41, 219–246. [Google Scholar] [CrossRef]
- Holmström, J.; Ketokivi, M.; Hameri, A.P. Bridging practice and theory: A design science approach. Decis. Sci. 2009, 40, 65–87. [Google Scholar] [CrossRef]
- Lotteau, M.; Yepez-Salmon, G.; Salmon, N. Environmental assessment of sustainable neighborhood projects through NEST, a decision support tool for early stage urban planning. Procedia Eng. 2015, 115, 69–76. [Google Scholar] [CrossRef] [Green Version]
- Leon, I.; Oregi, X.; Marieta, C. Environmental assessment of four Basque University campuses using the NEST tool. Sustain. Cities Soc. 2018, 42, 396–406. [Google Scholar] [CrossRef]
- Arias, A.; Leon, I.; Oregi, X.; Marieta, C. Environmental Assessment of University Campuses: The Case of the University of Navarra in Pamplona (Spain). Sustainability 2021, 13, 8588. [Google Scholar] [CrossRef]
- Gorzalka, P.; Estevam Schmiedt, J.; Schorn, C.; Hoffschmidt, B. Automated Generation of an Energy Simulation Model for an Existing Building from UAV Imagery. Buildings 2021, 11, 380. [Google Scholar] [CrossRef]
- Rebelo, C.; Rodrigues, A.M.; Tenedório, J.A.; Goncalves, J.A.; Marnoto, J. Building 3D city models: Testing and comparing Laser scanning and low-cost UAV data using FOSS technologies. In Proceedings of the International Conference on Computational Science and Its Applications, Banff, AB, Canada, 22–25 June 2015; Springer: Cham, Switzerland; pp. 367–379. [Google Scholar]
- Küng, O.; Strecha, C.; Fua, P.; Gurdan, D.; Achtelik, M.; Doth, K.M.; Stumpf, J. Simplified Building Models Extraction from Ultra-Light UAV Imagery. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, XXXVIII-1/C22, 217–222. [Google Scholar] [CrossRef] [Green Version]
- Pu, S.; Vosselman, G. Knowledge based reconstruction of building models from terrestrial laser scanning data. ISPRS J. Photogramm. Remote Sens. 2009, 64, 575–584. [Google Scholar] [CrossRef]
- Feng, X.; Li, P. A tree species mapping method from UAV images over urban area using similarity in tree-crown object histograms. Remote Sens. 2019, 11, 1982. [Google Scholar] [CrossRef] [Green Version]
- Persad, R.A.; Armenakis, C. Co-registration of DSMS generated by UAV and Terrestrial Laser Scanning Systems. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 985–990. [Google Scholar] [CrossRef] [Green Version]
- Heinzel, J.; Koch, B. Exploring full-waveform LiDAR parameters for tree species classification. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 152–160. [Google Scholar] [CrossRef]
- Yu, B.; Liu, H.; Zhang, L.; Wu, J. An object-based two-stage method for a detailed classification of urban landscape components by integrating airborne LiDAR and color infrared image data: A case study of downtown Houston. In Proceedings of the 2009 Joint Urban Remote Sensing Event, Shanghai, China, 20–22 May 2009; pp. 1–8. [Google Scholar]
- Mill, T.; Alt, A.; Liias, R. Combined 3D building surveying techniques—Terrestrial laser scanning (TLS) and total station surveying for BIM data management purposes. J. Civ. Eng. Manag. 2013, 19, S23–S32. [Google Scholar] [CrossRef]
- Drešček, U.; Kosmatin Fras, M.; Tekavec, J.; Lisec, A. Spatial ETL for 3D Building Modelling Based on Unmanned Aerial Vehicle Data in Semi-Urban Areas. Remote Sens. 2020, 12, 1972. [Google Scholar] [CrossRef]
- Senderos, M.; Leon, I.; Pérez, J.J. Levantamiento gráfico de patrimonio industrial en actividad: Nueva Cerámica de Orio. EGA Expresión Gráfica Arquit. 2019, 24, 92–105. [Google Scholar] [CrossRef] [Green Version]
- Cali, M.; Ambu, R. Advanced 3D Photogrammetric Surface Reconstruction of Extensive Objects by UAV Camera Image Acquisition. Sensors 2018, 18, 2815. [Google Scholar] [CrossRef] [Green Version]
- Sestras, P.; Roșca, S.; Bilașco, Ș.; Naș, S.; Buru, S.M.; Kovacs, L.; Spalević, V.; Sestras, A.F. Feasibility Assessments Using Unmanned Aerial Vehicle Technology in Heritage Buildings: Rehabilitation-Restoration, Spatial Analysis and Tourism Potential Analysis. Sensors 2020, 20, 2054. [Google Scholar] [CrossRef] [Green Version]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote. Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, T.; Liu, J.; Li, X.; Liang, C. Hierarchical Instance Recognition of Individual Roadside Trees in Environmentally Complex Urban Areas from UAV Laser Scanning Point Clouds. ISPRS Int. J. Geo-Inf. 2020, 9, 595. [Google Scholar] [CrossRef]
- Hirschmüller, H.; Bucher, T. Evaluation of Digital Surface Models by Semi-Global. Available online: https://elib.dlr.de/66923/1/dgpf2010.pdf (accessed on 22 January 2022).
- Lafarge, F.; Mallet, C. Creating large-scale city models from 3D-point clouds: A robust approach with hybrid representation. Int. J. Comput. Vis. 2012, 99, 69–85. [Google Scholar] [CrossRef]
- Gui, D.; Lin, Z.; Zhang, C. Research on construction of 3D building based on oblique images from UAV. Sci. Surv. Mapp. 2012, 37, 140–142. [Google Scholar]
- Lefsky, M.; Cohen, W.; Parker, G.; Harding, D. Lidar Remote Sensing for Ecosystem Studies. BioScience 2009, 52, 19–30. [Google Scholar] [CrossRef]
- Wehr, A.; Lohr, U. Airborne laser scanning—an introduction and overview. ISPRS J. Photogramm. Remote Sens. 1999, 54, 68–82. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, S.; Li, J.; Ma, L.; Wu, R.; Luo, Z.; Wang, C. Rapid urban roadside tree inventory using a mobile laser scanning system. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 3690–3700. [Google Scholar] [CrossRef]
- Hu, P.; Yang, B.; Dong, Z.; Yuan, P.; Huang, R.; Fan, H.; Sun, X. Towards Reconstructing 3D Buildings from ALS Data Based on Gestalt Laws. Remote Sens. 2018, 10, 1127. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Weng, Q.; Zheng, Y. A Hybrid Approach for Three-Dimensional Building Reconstruction in Indianapolis from LiDAR Data. Remote Sens. 2017, 9, 310. [Google Scholar] [CrossRef] [Green Version]
- Jung, J.; Jwa, Y.; Sohn, G. Implicit Regularization for Reconstructing 3D Building Rooftop Models Using Airborne LiDAR Data. Sensors 2017, 17, 621. [Google Scholar] [CrossRef] [PubMed]
- Yang, B.; Huang, R.; Li, J.; Tian, M.; Dai, W.; Zhong, R. Automated Reconstruction of Building LoDs from Airborne LiDAR Point Clouds Using an Improved Morphological Scale Space. Remote Sens. 2017, 9, 14. [Google Scholar] [CrossRef] [Green Version]
- Kedzierski, M.; Fryskowska, A. Methods of laser scanning point clouds integration in precise 3D building modelling. Measurement 2015, 74, 221–232. [Google Scholar] [CrossRef]
- Szabó, Z.; Schlosser, A.; Túri, Z.; Szabó, S. A review of climatic and vegetation surveys in urban environment with laser scanning: A literature-based analysis. Geogr. Pannonica 2019, 23, 411–421. [Google Scholar] [CrossRef] [Green Version]
- Dorninger, P.; Pfeifer, N. A comprehensive automated 3D approach for building extraction, reconstruction, and regularization from airborne laser scanning point clouds. Sensors 2008, 8, 7323–7343. [Google Scholar] [CrossRef] [Green Version]
- Jurjević, L.; Gašparović, M.; Liang, X.; Balenović, I. Assessment of Close-Range Remote Sensing Methods for DTM Estimation in a Lowland Deciduous Forest. Remote Sens. 2021, 13, 2063. [Google Scholar] [CrossRef]
- Tian, J.; Luo, S.; Wang, X.; Hu, J.; Yin, J. Crane lifting optimization and construction monitoring in steel bridge construction project based on BIM and UAV. Adv. Civ. Eng. 2021, 2021, 5512229. [Google Scholar] [CrossRef]
- Leksono, B.E.; Soedomo, A.S.; Apriani, L.; Sugito, N.T.; Rabbani, A. Acceleration of land certification with unmanned aerial vehicle in Cisumdawu toll road construction area. Indones. J. Geogr. 2019, 51, 1–8. [Google Scholar] [CrossRef]
- Wu, B.; Yu, B.; Yue, W.; Shu, S.; Tan, W.; Hu, C.; Huang, Y.; Wu, J.; Liu, H. A Voxel-Based Method for Automated Identification and Morphological Parameters Estimation of Individual Street Trees from Mobile Laser Scanning Data. Remote Sens. 2013, 5, 584–611. [Google Scholar] [CrossRef] [Green Version]
- García, J.; Ros, J.; Vázquez, G.; Montes, F.D. La evolución y cambio del alzado de una vía principal durante el último siglo. Aplicación a un tramo de la Calle del Carmen de Cartagena. EGA Rev. Expresión Gráfica Arquit. 2017, 22, 204–213. [Google Scholar] [CrossRef] [Green Version]
- Sánchez, S.; Vidal, F.; Cipriani, L.; Ríos, J.L. Limitaciones en el levantamiento digital de bienes patrimoniales con tipología de torre. EGA Expresión Gráfica Arquit. 2021, 26, 76–89. [Google Scholar] [CrossRef]
- Martínez, J.; Fernández, J.J.; San José, J.I. Implementación de escáner 3d y fotogrametría digital para la documentación de la iglesia de La Merced de Panamá. EGA Expresión Gráfica Arquit. 2018, 23, 208–219. [Google Scholar] [CrossRef] [Green Version]
- Husain, A.; Vaishya, R.C. Detection and thinning of street trees for calculation of morphological parameters using mobile laser scanner data. Remote Sens. Appl. Soc. Environ. 2018, 13, 375–388. [Google Scholar] [CrossRef]
- Guan, H.; Yu, Y.; Ji, Z.; Li, J.; Zhang, Q. Deep learning-based tree classification using mobile LiDAR data. Remote. Sens. Lett. 2015, 6, 864–873. [Google Scholar] [CrossRef]
- Simon, H. The Sciences of the Artificial; Comares: Granada, Spain, 2006. [Google Scholar]
- Gregor, S.; Hevner, A. Positioning and presenting design science research for maximum impact. MIS Q. 2013, 37, 337–355. [Google Scholar] [CrossRef]
- Jones, D.; Gregor, S. The anatomy of a design theory. J. Assoc. Inf. Syst. 2007, 8, 1. [Google Scholar] [CrossRef] [Green Version]
- March, S.; Smith, G. Design and natural science research on information technology. Decis. Support Syst. 1995, 15, 251–266. [Google Scholar] [CrossRef]
- Hevner, A.; March, S.; Park, J.; Ram, S. Design science in information systems research. MIS Q. 2004, 28, 75–105. [Google Scholar] [CrossRef] [Green Version]
- Zlot, R.; Bosse, M. Efficient Large-scale Three-dimensional Mobile Mapping for Underground Mines. J. Field Robot. 2014, 31, 758–779. [Google Scholar] [CrossRef]
- Chang, H.J.; Lee, C.S.G.; Lu, Y.-H.; Hu, Y.C. P-SLAM: Simultaneous Localization and Mapping with Environmental-Structure Prediction. IEEE Trans. Robot. 2007, 23, 281–293. [Google Scholar] [CrossRef] [Green Version]
- Ozimek, A.; Ozimek, P.; Skabek, K.; Łabędź, P. Digital Modelling and Accuracy Verification of a Complex Architectural Object Based on Photogrammetric Reconstruction. Buildings 2021, 11, 206. [Google Scholar] [CrossRef]
- Salach, A.; Bakula, K.; Pilarska, M.; Ostrowski, W.; Górski, K.; Kurczynski, Z. Accuracy assessment of point clouds from LidaR and dense image matching acquired using the UAV platform for DTM creation. ISPRS Workshop Photogramm. Image Anal. 2018, 7, 342. [Google Scholar] [CrossRef] [Green Version]
- Tarsha-Kurdi, F.; Landes, T.; Grussenmeyer, P.; Koehl, M. Model-driven and data-driven approaches using LIDAR data: Analysis and comparison. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2007, XXXVI-3/W4, 87–92. [Google Scholar]
- Hammad, A.W.A.; da Costa, B.B.F.; Soares, C.A.P.; Haddad, A.N. The Use of Unmanned Aerial Vehicles for Dynamic Site Layout Planning in Large-Scale Construction Projects. Buildings 2021, 11, 602. [Google Scholar] [CrossRef]
- Son, S.W.; Kim, D.W.; Sung, W.G.; Yu, J.J. Integrating UAV and TLS Approaches for Environmental Management: A Case Study of a Waste Stockpile Area. Remote Sens. 2020, 12, 1615. [Google Scholar] [CrossRef]
- Farella, E.M.; Torresani, A.; Remondino, F. Refining the Joint 3D Processing of Terrestrial and UAV Images Using Quality Measures. Remote Sens. 2020, 12, 2873. [Google Scholar] [CrossRef]
- Yepez, G. Construction D´un Outil D´évaluation Environnementale des Écoquartiers: Vers une Méthode Systémique de Mise en Œuvre de la Ville Durable. Ph.D. Thesis, Université Bordeaux, Bordeaux, France, 7 September 2011. [Google Scholar]
- ISO 14040; Environmental Management—Life Cycle Assessment–Principles and Framework; International Organization for Standardization: Geneva, Switzerland, 2018.
- Survey Office, version 5.30; Spectra Geospatial: Westminster, CO, USA; Trimble: Sunnyvale, CA, USA, 2020.
- Cyclone FIELD 360, Leica Geosystems: St. Gallen, Switzerland, 2020.
- DJI-GS Pro, version 2.0.15; (iOS 9.2); DJI: Shenzhen, China, 2018.
- Cyclone REGISTER 360, Leica Geosystems: St. Gallen, Switzerland, 2020.
- PointCab, PointCab GmbH: Wernau, Germany, 2020.
- ReCap Pro, (Windows); Autodesk: Mill Valley, CA, USA, 2020.
- TruView, Leica Geosystems: St. Gallen, Switzerland, 2020.
- Jetstream Viewer, Leica Geosystems: St. Gallen, Switzerland, 2020.
- You, H.; Li, S.; Xu, Y.; He, Z.; Wang, D. Tree Extraction from Airborne Laser Scanning Data in Urban Areas. Remote Sens. 2021, 13, 3428. [Google Scholar] [CrossRef]
- Robles, J.L.M.; Sanz, J.O.; Rodríguez, S.M.; Laurnaga, F.G.; Sastre, L.F.S.; Navarro, S.H.; Pérez, Z.C.; Sanz, L.O. Determinación de biomasa en parcelas de cultivos herbáceos mediante cámaras ópticas elevadas por medio de vehículos aéreos no tripulados (UAV). CIAIQ 2016, 4, 95–103. [Google Scholar]
- Gregorio, M.; Ricardo, R.; Peinado, M. Producción de Biomasa y Fijación de CO2 por los Bosques Españoles; INIA-Instituto Nacional de Investigación y Tecnología Agraria y Alimentaria: Madrid, Spain, 2005; p. 13. [Google Scholar]
- Chou, S.; Espeleta, E. Ecuación para estimar la biomasa arbórea en los bosques tropicales de Costa Rica. Tecnol. En Marcha 2013, 26, 41–54. [Google Scholar] [CrossRef]
- Sun, Z.; Cao, Y. Data processing workflows from low-cost digital survey to various applications: Three case studies of Chinese historic architecture. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 5, 409–416. [Google Scholar] [CrossRef] [Green Version]
- Gaiani, M.; Remondino, F.; Apollonio, F.I.; Ballabeni, A. An Advanced Pre-Processing Pipeline to Improve Automated Photogrammetric Reconstructions of Architectural Scenes. Remote Sens. 2016, 8, 178. [Google Scholar] [CrossRef] [Green Version]
- Sun, Z.; Zhang, Y. Using Drones and 3D Modeling to Survey Tibetan Architectural Heritage: A Case Study with the Multi-Door Stupa. Sustainability 2018, 10, 2259. [Google Scholar] [CrossRef] [Green Version]
- Xingzhi, W.; Yuchen, W.; Fei, T.; Ang, L. New Paradigm of Data-Driven Smart Customisation through Digital Twin. J. Manuf. Syst. 2021, 58, 270–280. [Google Scholar]
- Lee, A.; Lee, K.-W.; Kim, K.-H.; Shin, S.-W. A Geospatial Platform to Manage Large-Scale Individual Mobility for an Urban Digital Twin Platform. Remote Sens. 2022, 14, 723. [Google Scholar] [CrossRef]
- Warke, V.; Kumar, S.; Bongale, A.; Kotecha, K. Sustainable Development of Smart Manufacturing Driven by the Digital Twin Framework: A Statistical Analysis. Sustainability 2021, 13, 10139. [Google Scholar] [CrossRef]
- Demystifying Artificial Intelligence based Digital Twins in Manufacturing-A Bibliometric Analysis of Trends and Techniques. Available online: https://www.researchgate.net/profile/Satish-Kumar-V-C/publication/346057367_Demystifying_Artificial_Intelligence_based_Digital_Twins_in_Manufacturing-A_Bibliometric_Analysis_of_Trends_and_Techniques/links/5fb9160f299bf104cf66d615/Demystifying-Artificial-Intelligence-based-Digital-Twins-in-Manufacturing-A-Bibliometric-Analysis-of-Trends-and-Techniques.pdf (accessed on 14 February 2022).
- Ibarrola, E.; Oregi, X.; Leon, I.; Marieta, C. Evaluación de los aspectos Energéticos y Medioambientales del campus de Vitoria/Gasteiz. In Proceedings of the RED-U, Bilbao, Spain, 13–14 November 2017; pp. 235–245. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Shot Coverage | Front Overlap between Photos | Side Overlap | GSD Resolution | Photographs per Shot | Flight Duration per Shot | Nadiral Shot −90° | Oblique Shot −65° | Total Flight Time |
|---|---|---|---|---|---|---|---|---|
| 1 ha | 75% | 75% | 1 cm/px | 90 | 20 min. | 1 | 4 | 100 min. |
| Product Phase (A1–3) | Transport (A4) | On Site Processes (A5) | Maintenance (B2) | Replacement (B4) | Operational Energy Use (B6) | Operational Water Use (B7) | End-of-Life Phase (C1–4) | |
|---|---|---|---|---|---|---|---|---|
| Buildings | - | - | - | - | - | - | - | - |
| Land use | - | - | - | - | - | - | - | - |
| Infrastructure | - | - | - | - | ||||
| Mobility | - | - | N/A | N/A | N/A | - | - |
| Equipment | Trademark | Model | Use |
|---|---|---|---|
| Total Station | Leica Geosystems | TCR-407 | Establishment of Control Points in UTM coordinates. |
| Terrestrial Laser Scanner (TLS) | Leica Geosystems | RTC-360 | Massive capture of points by laser scanning. |
| Leica Geosystems | BLK 360 | Massive capture of points by laser scanning. Thermographic capture. | |
| UAV-RPAs | DJI | Phantom 4 pro | Massive capture of points through photographic series. |
| Tablet | Samsung | TAB S6 LITE 64 Gb RAM | RPAs flight and laser scanning operation interface. |
| Work Phase | Software | Scan Data Import | Import Formats | Export Formats |
|---|---|---|---|---|
| UTM referencing | Survey Office [66] | - | ASCII, LandXML | ASCII, LandXML, GIS/CAD |
| Scanning and Pre-processing | Field 360 * [67] | - | Direct Wifi connection with the 3D scanner or UAV automatic import to tablet | Direct export to Leica Cyclone REGISTER 360 via Wi-Fi network. |
| DJI-GS Pro (UAV) [68] | Photographs in the SD of the UAV | |||
| Processing | Cyclone REGISTER 360 * [69] | Only Leica | LGS, PTX, PTS, E57, etc. | Almost any format: cloud of points and geometries. Accuracy reports. 360 images. |
| PointCab [70] | Independent | XYZ, E57 | Point information, CAD formats | |
| ReCap Autodesk [71] | Independent | XYZ, E57 | Autocad (DWG), E57 PTS RCP/RCS | |
| Results visualization | TruView * [72] | Only Leica | LGS | Almost any format: cloud of points and geometries. Accuracy reports. 360 images. |
| Jetstream Viewer * [73] | Only Leica | LGS | Point information, CAD formats (free) | |
| ReCap Autodesk [71] | Independent | XYZ, E57 | Autocad (DWG), E57 PTS RCP/RCS |
| Facade Length | Height to Eave | Facade Surface | Window Dimensions F0/F1 | Window Dimensions F2/F3 |
|---|---|---|---|---|
| 51.90 m. | 15.50 m. | 804.45 m2 | 1.55 × 1.35 m. | 1.55 × 2.30 m. |
| Sectors | Sectors Overlap | Flight Height | Ground Sample Distance GSD | Nadir Shot (−90°) | Oblique Shot (−65°) | Frontal Overlap | Lateral Overlap | Flight Time | Batteries | Photos |
|---|---|---|---|---|---|---|---|---|---|---|
| Sector type 1 ha | - | 37.3 m | 1 cm/pixel | 1 | 4 | 75% | 75% | 100 min | 5 sets | 450 |
| Set of sectors 147 ha | 10 m. (10%) | 37.3 m | 1 cm/pixel | 147 | 588 | 75% | 75% | 245 h | 735 sets | 66,150 |
| Impact Indicator | Sector | Life-Cycle Stage * | Baseline Scenario | 2030 | 2050 | |||
|---|---|---|---|---|---|---|---|---|
| UNAV | UPV/EHU | UNAV | UPV/EHU | UNAV | UPV/EHU | |||
| PE (MJ/year) | Buildings (BP) | A1–3, A4–5, B2, B4, C1–4 | 7.5 × 106 | 1.0 × 107 | 1.7 × 107 | 1.5 × 107 | 3.4 × 107 | 1.7 × 107 |
| Buildings (BU) | B6 | 1.3 × 108 | 3.8 × 107 | 1.1 × 108 | 3.7 × 107 | 9.3 × 107 | 3.5 × 107 | |
| Public lighting (PL) | B6 | 2.2 × 106 | 3.1 × 106 | 1.7 × 106 | 2.5 × 106 | 1.1 × 106 | 1.6 × 106 | |
| Mobility | A1–3, B6, C1–4 | 1.8 × 103 | 3.1 × 103 | 1.8 × 103 | 3.1 × 103 | 1.8 × 103 | 3.1 × 103 | |
| GWP (kgeqCO2/year) | Buildings (BP) | A1–3, A4–5, B2, B4, C1–4 | 3.5 × 105 | 4.1 × 105 | 8.1 × 105 | 6.3 × 105 | 9.7 × 105 | 7.2 × 105 |
| Buildings (BU) | B6 | 6.3 × 106 | 1.9 × 106 | 5.0 × 106 | 1.8 × 106 | 4.4 × 106 | 1.7 × 106 | |
| Public lighting (PL) | B6 | 2.3 × 105 | 3.3 × 105 | 1.9 × 105 | 2.7 × 105 | 1.2 × 105 | 1.7 × 105 | |
| Mobility | A1–3, B6, C1–4 | 1.0 × 102 | 1.4 × 102 | 1.0 × 102 | 1.4 × 102 | 1.0 × 102 | 1.4 × 102 | |
| Energy consumption (kWh/year) | Natural gas (NG) | B6 | 1.7 × 107 | 1.5 × 106 | 9.4 × 106 | 1.2 × 106 | 5.7 × 106 | 6.9 × 105 |
| Electricity (E) | B6 | 9.7 × 106 | 5.9 × 106 | 1.0 × 107 | 5.7 × 106 | 1.1 × 107 | 5.5 × 106 | |
| Biomass (B) | B6 | 7.0 × 103 | 0.0 | 6.3 × 105 | 4.5 × 104 | 1.0 × 106 | 9.8 × 104 | |
| Renewable energy production (kWh) | Thermal solar (TS) | 3.6 × 104 | 7.1 × 104 | 2.4 × 105 | 1.9 × 105 | 6.6 × 105 | 4.7 × 105 | |
| Photovoltaic (P) | 0.0 | 4.7 × 105 | 1.8 × 106 | 7.8 × 105 | 3.7 × 106 | 1.6 × 106 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pérez, J.J.; Senderos, M.; Casado, A.; Leon, I. Field Work’s Optimization for the Digital Capture of Large University Campuses, Combining Various Techniques of Massive Point Capture. Buildings 2022, 12, 380. https://doi.org/10.3390/buildings12030380
Pérez JJ, Senderos M, Casado A, Leon I. Field Work’s Optimization for the Digital Capture of Large University Campuses, Combining Various Techniques of Massive Point Capture. Buildings. 2022; 12(3):380. https://doi.org/10.3390/buildings12030380
Chicago/Turabian StylePérez, José Javier, María Senderos, Amaia Casado, and Iñigo Leon. 2022. "Field Work’s Optimization for the Digital Capture of Large University Campuses, Combining Various Techniques of Massive Point Capture" Buildings 12, no. 3: 380. https://doi.org/10.3390/buildings12030380