
Study on a Novel Variable-Frequency Rolling Pendulum Bearing

Abstract
:1. Introduction
2. Derivation of Theoretical Formulas for the Device
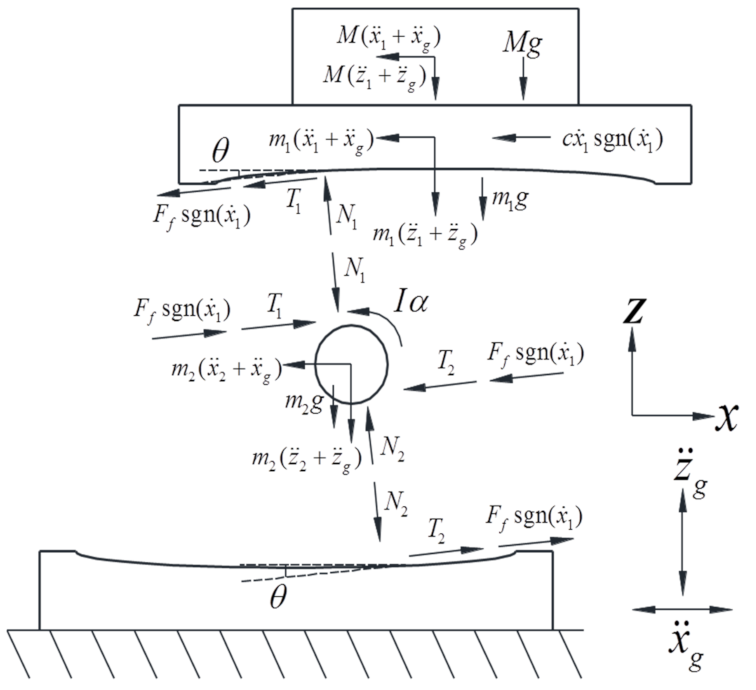
2.1. The Analytical Model for the Device
2.2. The Restoring Force
2.3. The Surface Functions
2.3.1. Traditional Spherical Surface
2.3.2. Traditional Elliptic Surface
2.3.3. Variable-Frequency Surface
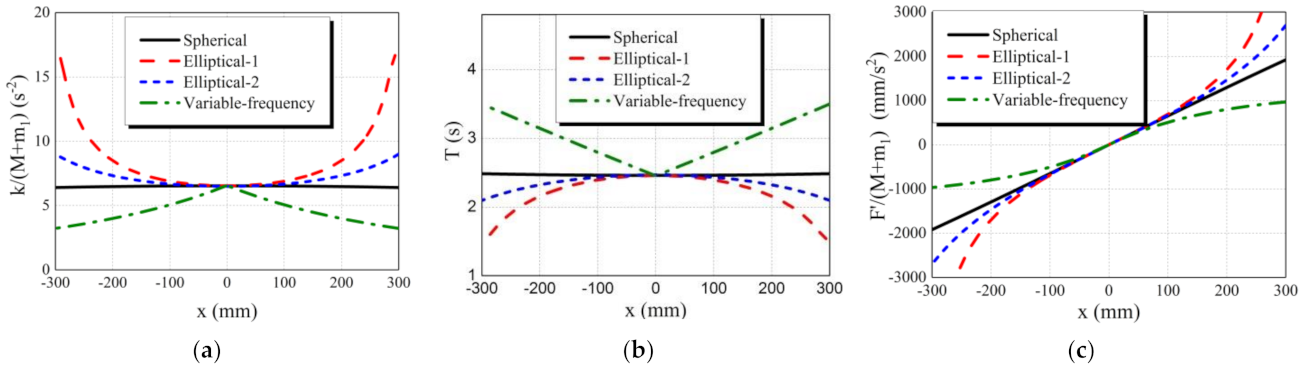
2.4. Comparison of the Device Characteristics with Different Curved Surfaces
2.5. Mechanical Characteristic of the Four Pendulum Bearings
2.5.1. The Stiffness, Natural Period and Horizontal Restoring Force
2.5.2. The Hysteretic Performance
2.5.3. The Self-Restoring Performance
3. The Shake Table Tests
3.1. The Design of the Pendulum Bearings
3.1.1. The Key Parameters
3.1.2. The Support Plates and the Rolling Sphere
3.1.3. The Viscous Damper
3.1.4. The Rolling Ball and the Rolling Friction
3.1.5. The Issues Regarding Limit, Overturning and Torsion
3.1.6. The Issues Regarding Manufacturing and Assembly Installation
3.2. The Shake Table
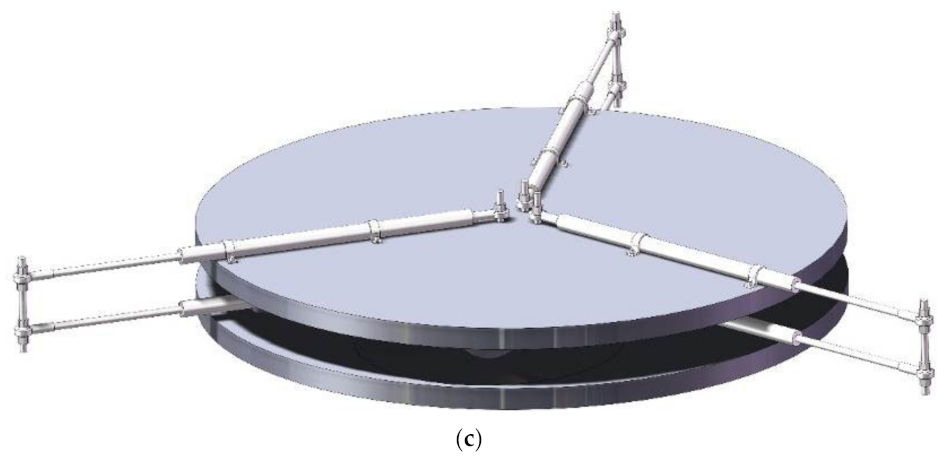
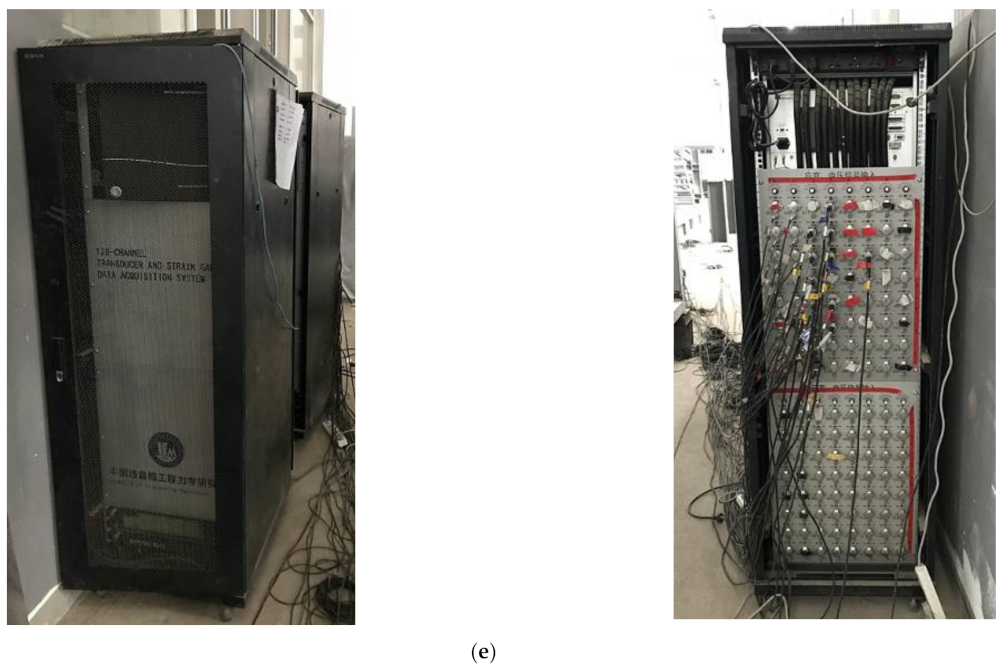
3.2.1. Shake Table Apparatus
3.2.2. Arrangement of Data Acquisition Points
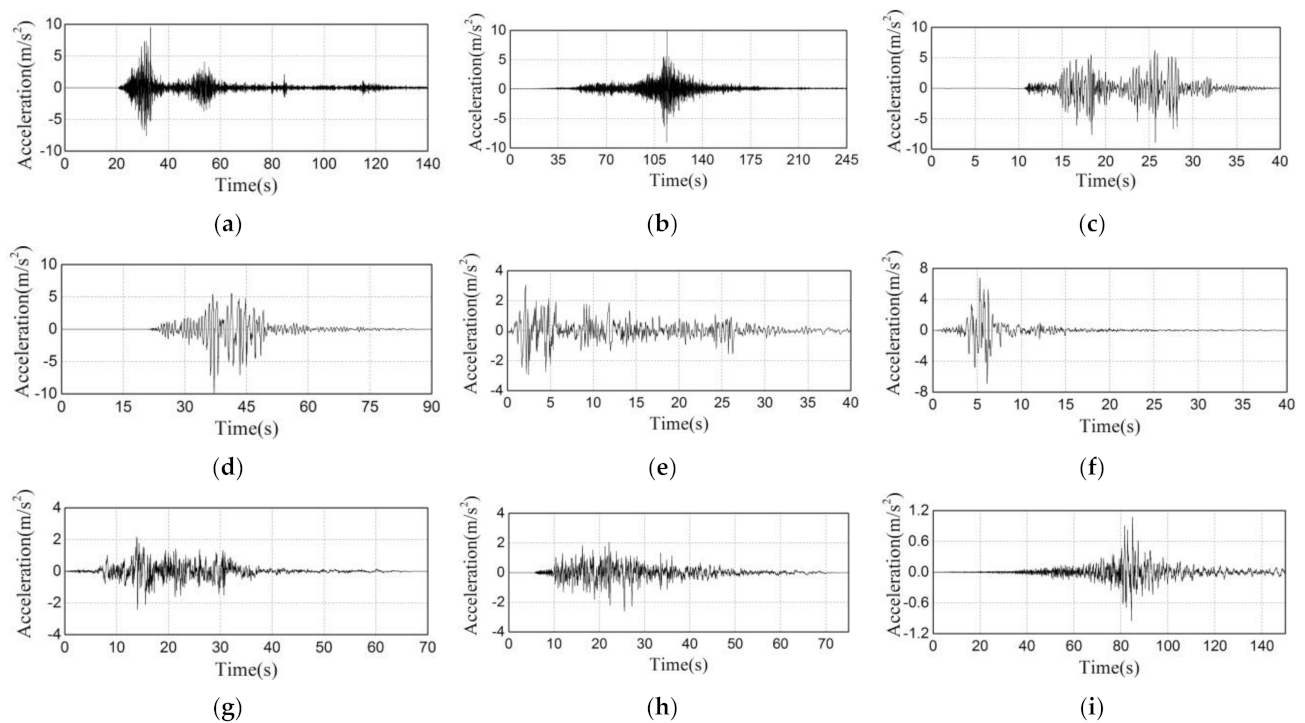
3.2.3. Selecting and Scaling Ground Motion Records
3.3. Shake Table Test Results
3.3.1. Test Phenomenon
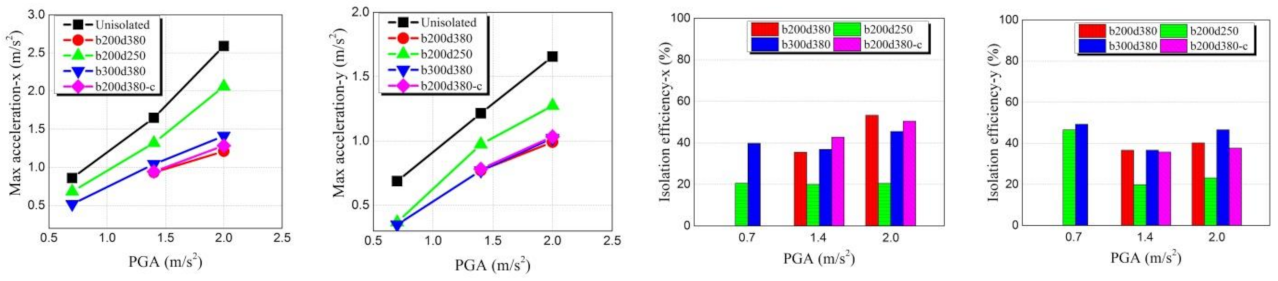
3.3.2. Acceleration Responses of the Devices
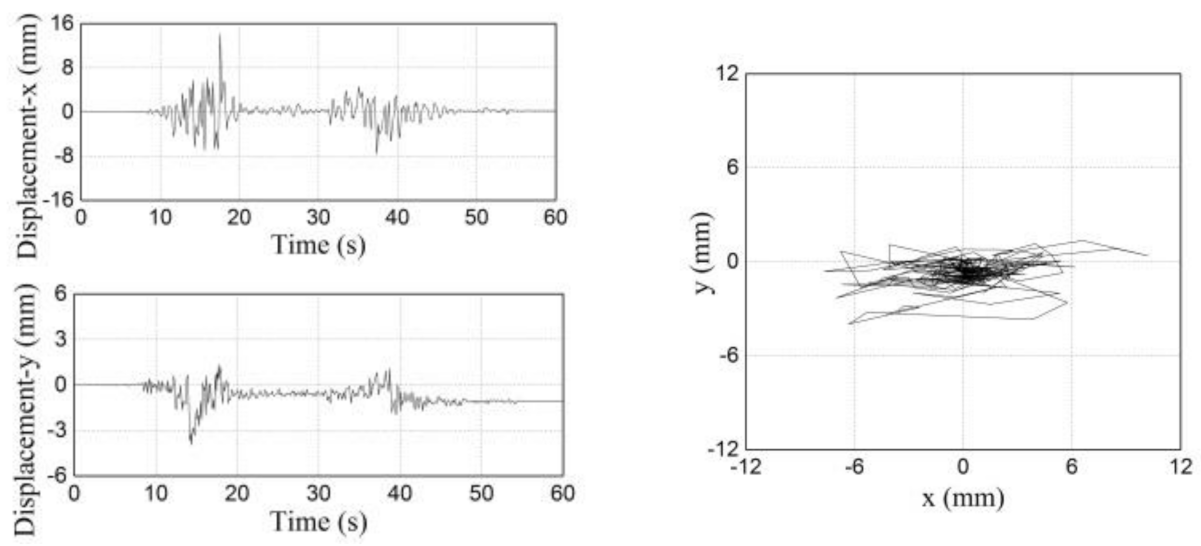
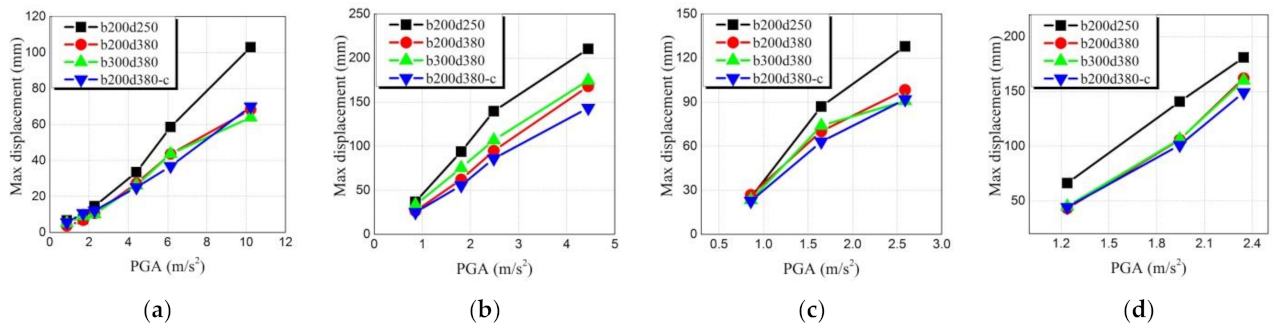
3.3.3. Displacement Responses of the Devices
4. The Numerical Analysis
- (1)
- At the start of the integration, the known solution dependent variables, including , can be retrieved from the previous step, whereas can be read from the input accelerations. According to the surface function, can be represented in terms of . Meanwhile, the damping force can be updated in terms of .
- (2)
- According to Equation (37), the relative acceleration can be updated. At this time, particular emphasis should be placed on the motion state of the upper plate. If the upper plate is at rest, this integration step will be competed with and .
- (3)
- When the upper plate begins to move, the solution dependent variables can be solved with using the fictitious relative acceleration . In this scenario, additional judgment is required to establish whether the product of and is positive or negative. If the product is positive, this integration step will be completed immediately. If the product is negative, the solution dependent variables, including , should be determined based on Equations (42)–(45).
- (4)
- Following the determination of the product of and , the motion state of the upper plate should be reconfirmed. If the upper plate is stationary, this integration step will be competed with and is consistent with the relative displacement determined in Step (3). If the upper plate continues to move, the product of and derived in Step (3) should be recalculated. The following routine is in accordance with Step (3).
- (5)
- Repeat the above steps until the whole numerical analysis has been completed.
5. Conclusions and Recommendation
- (1)
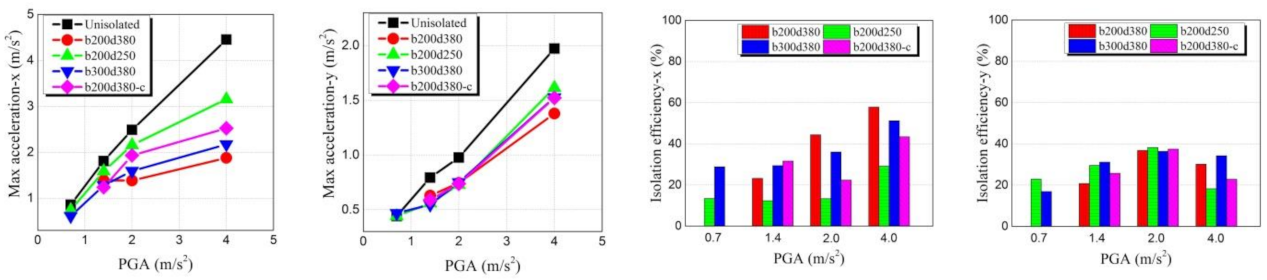
- The isolation efficiency of the novel isolation bearings rise with the growth of the predominant frequency of the ground motions: the isolation efficiency is about 30% under low- or intermediate-frequency ground motions, and about 70% under high-frequency ground motions; the maximum relative-displacement responses demonstrate an obviously opposite trend: the maximum relative displacements of the b200d380 bearing are about 6 mm, 45 mm, and 65 mm when subjected to Wo-long, ChiChi-TCU084 and ChiChi-TCU122 ground motions with PGA of 2 m/s2, respectively. Meanwhile, the proposed devices exhibit more distinguished isolation performance with the growth of the input peak ground accelerations.
- (2)
- Increasing the isolation system damping could reduce the maximum displacement responses of the device, although the isolation efficiency may be lower: under high-frequency ground motions, there is no significant difference between the b200d380 bearing and the b200d380-c devices; under medium- and low-frequency ground motions, the b200d380 bearing becomes more efficient than the b200d380-c bearing with the growth of the PGA, whereas the maximum displacement responses demonstrate an obviously opposite trend.
- (3)
- The variations of surface parameters definitely have an impact on the isolation performance. In practical terms, the isolation efficiency of the variable-frequency bearings can get higher with the growth of parameter d, or the decline of parameter b.
- (4)
- The complementary numerical algorithms for the novel isolation system are proposed and the simulated peak acceleration responses and peak displacement responses are almost consistent with test results: under different ground motions, the differences of the peak displacement responses are within 20%, while the differences of the peak acceleration responses are within 25%. The comparison results validate the reliability of test results, as well as the effectiveness of the simulated results, which can be utilized for further study.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Touaillon, J. Improvement in Buildings. U.S. Patent 99, 973, 15 February 1870. [Google Scholar]
- Izumi, M. State-of-the-art report: Base isolation and passive seismic response control. Ninth world conference on earthquake engineering. Proceedings of Ninth World Conference on Earthquake Engineering, Tokyo, Japan, 2–8 August 1988. [Google Scholar]
- Derham, C.J.; Thomas, A.G.; Eidinger, J.M.; Kelly, J.M. Natural Rubber Foundation Bearings for Earthquake Protection Experimental Results. NR Ref. 244 Technol. 1977, 39, 41–61, reprinted in Rubber Chem. Technol. 1980 53 186–209. [Google Scholar] [CrossRef]
- Robinson, W.H. Lead-Rubber Hysteretic Bearings suitable for protecting structures during earthquakes. Earthq. Eng. Struct. Dyn. 1982, 10, 593–604. [Google Scholar] [CrossRef]
- Zayas, V.; Low, S.; Mahin, S. The Friction Pendulum System (FPS) Earthquake Resisting System: Experimental Report–Report N° UCB/EERC87/01; Earthquake Engineering Research Center: Berkeley, CA, USA, 1987. [Google Scholar]
- Costantinou, M.C.; Mokha, A.; Reinhorn, A.M. Teflon Bearings in Aseismic Base Isolation: Experimental Studies and Mathematical Modeling; Report N. NCEER-88/0038; National Center for Earthquake Engineering Research, State University of New York: Buffalo, NY, USA, 1988. [Google Scholar]
- Uang, C.M.; Bertero, V. Evaluation of seismic energy in structures. Earthq. Eng. Struct. Dyn. 1990, 19, 77–90. [Google Scholar] [CrossRef]
- Kelly, J.M. Base Isolation: Linear Theory and Design. Earthq. Spectra 1990, 6, 223–244. [Google Scholar] [CrossRef]
- Cheng, C.T.; Chao, C.H. Seismic behavior of rocking base-isolated structures. Eng. Struct. 2017, 139, 46–58. [Google Scholar] [CrossRef]
- Ismail, M.; Rodellar, J. Experimental investigations of a rolling-based seismic isolation system. J. Vib. Control. 2018, 24, 323–342. [Google Scholar] [CrossRef]
- Xiong, W.; Zhang, S.J.; Jiang, L.Z.; Li, Y.Z. The Multangular-Pyramid Concave Friction System (MPCFS) for seismic isolation: A preliminary numerical study. Eng. Struct. 2018, 160, 383–394. [Google Scholar] [CrossRef]
- Han, Q.; Liang, X.; Wen, J.; Li, Y. Multiple-variable frequency pendulum isolator with high-performance materials. Smart Mater. Struct. 2020, 29, 075002. [Google Scholar] [CrossRef]
- Erkal, A.; Tezcan, S.S.; Laefer, D.F. Assessment and code considerations for the combined effect of seismic base isolation and viscoelastic dampers. Int. Sch. Res. Not. 2011, 2011, 861451. [Google Scholar] [CrossRef] [Green Version]
- Banazadeh, M.; Gholhaki, M.; Parvini Sani, H. Cost-benefit analysis of seismic-isolated structures with viscous damper based on loss estimation. Struct. Infrastruct. Eng. 2017, 13, 1045–1055. [Google Scholar] [CrossRef]
- Hur, D.J.; Hong, S.C. Analysis of an Isolation System with Vertical Spring-viscous Dampers in Horizontal and Vertical Ground Motion. Appl. Sci. 2020, 10, 1411. [Google Scholar] [CrossRef] [Green Version]
- Deringöl, A.H.; Güneyisi, E.M. Influence of nonlinear fluid viscous dampers in controlling the seismic response of the base-isolated buildings. Structures 2021, 34, 1923–1941. [Google Scholar] [CrossRef]
- Lal, K.M.; Parsi, S.S.; Kosbab, B.D.; Ingersoll, E.D.; Charkas, H.; Whittaker, A.S. Towards standardized nuclear reactors: Seismic isolation and the cost impact of the earthquake load case. Nucl. Eng. Des. 2022, 386, 111487. [Google Scholar] [CrossRef]
- Ueda, S.; Enomoto, T.; Fujita, T. Experiments and analysis of roller type isolation device. In Proceedings of the 13th World Conference on Earthquake Engineering-WCEE, Vancouver, BC, Canada, 1–6 August 2004. Paper 3362. [Google Scholar]
- Robinson, W.H.; Gannon, C.R.; Meyer, J. The RoGlider—A sliding bearing with an elastic restoring force. Bull. N. Z. Soc. Earthq. Eng. 2006, 39, 81–84. [Google Scholar]
- Lowry, M.; Farrar, B.J.; Armendariz, D.; Podany, J. Protecting Collections in the J. Paul Getty Museum from Earthquake Damage. West. Assoc. Art Conserv. Newsl. 2007, 29, 16–23. [Google Scholar]
- Kesti, M.G.; Mowrtage, W.; Erdik, M. Earthquake Risk Reduction of Structures by a Low-Cost Base Isolation Device: Experimental Study on BNC Bearing. In Proceedings of the 14th European Conference on Earthquake Engineering-ECEE, Ohrid, Macedonia, 30 August–3 September 2010. [Google Scholar]
- Tsai, C.S.; Lin, Y.C.; Chen, W.S.; Su, H.C. Tri-directional shaking table tests of vibration sensitive equipment with static dynamics interchangeable ball pendulum system. Earthq. Eng. Eng. Vib. 2010, 9, 103–112. [Google Scholar] [CrossRef]
- De Canio, G. Marble devices for the Base isolation of the two Bronzes of Riace: A proposal for the David of Michelangelo. In Proceedings of the 15WCCE, Lisboa, Portugal, 24 September 2012. [Google Scholar]
- Berto, L.; Favaretto, T.; Saetta, A. Seismic risk mitigation technique for art objects: Experimental evaluation and numerical modelling of double concave curved surface sliders. Bull. Earthq. Eng. 2013, 11, 1817–1840. [Google Scholar] [CrossRef]
- Sorace, S.; Terenzi, G. Seismic performance assessment and base-isolated floor protection of statues exhibited in museum halls. Bull. Earthq. Eng. 2015, 13, 1873–1892. [Google Scholar] [CrossRef]
- Sorace, S.; Terenzi, G.; Bitossi, C.; Mori, E. Mutual seismic assessment and isolation of different art objects. Solid Dyn. Earthq. Eng. 2016, 85, 91–102. [Google Scholar] [CrossRef]
- Donà, M. Rolling-Ball Rubber-layer System for The Lightweight Structures Seismic Protection; Experimentation and Numerical Analyses; University of Trento: Trento, Italy, 2015. [Google Scholar]
- Deng, X.; Gong, J.; Zhou, Y. Theoretical analysis and numerical simulation of variable curvature friction pendulum isolation bearing. J. Civ. Archit. Environ. Eng. 2011, 33, 50–58. (In Chinese) [Google Scholar]
- Reyes, S.I.; Almazán, J.L. A novel device for a vertical rocking isolation system with uplift allowed for industrial equipment and structures. Eng. Struct. 2020, 214, 110595. [Google Scholar] [CrossRef]
- Hsu, T.W.; Chang, C.M. Dynamics characteristics of geometrically nonlinear isolation systems for seismic protection of equipment. Earthq. Eng. Struct. Dyn. 2021, 50, 2795–2816. [Google Scholar] [CrossRef]
- Koo, G.-H.; Jung, J.-Y.; Hwang, J.-K.; Shin, T.-M.; Lee, M.-S. Vertical Seismic Isolation Device for Three-Dimensional Seismic Isolation of Nuclear Power Plant Equipment—Case Study. Appl. Sci. 2022, 12, 320. [Google Scholar] [CrossRef]
- Kavyashree, B.G.; Patil, S.; Rao, V.S. Review on vibration control in tall buildings: From the perspective of devices and applications. Int. J. Dyn. Control. 2021, 9, 1316–1331. [Google Scholar] [CrossRef]
- Pranesh, M.; Sinha, R. VFPI: An isolation device for aseismic design. Earthq. Eng. Struct. Dyn. 2000, 29, 603–627. [Google Scholar] [CrossRef]
- Murnal, P.; Sinha, R. Behavior of Torsionally Coupled Structures with Variable Frequency Pendulum Isolator. J. Struct. Eng. 2004, 130, 1041–1054. [Google Scholar] [CrossRef]
- Li, B.; Chen, Y.; Sun, P.; Li, B.; Liu, W. Engineering Measurement and Verification of Rolling Friction Coefficients. Constr. Mach. Equip. 2017, 48, 29–32. (In Chinese) [Google Scholar]
- Ning, X.; Dai, J.; Wang, D.; Bai, W. Shaking table test of seismic bracings in piping systems. In Proceedings of the 16th World Conference on Earthquake-WCEE, Santiago, Chile, 9–13 January 2017. Paper N 416. [Google Scholar]
- Chinese Standard GB 50011-2010; Code for Seismic Design of Buildings. National Standard of the People’s Republic of China: Beijing, China, 2010.










































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Surface Classification | Spherical Surface | Elliptic Surface 1 | Elliptic Surface 2 | Variable Frequency Surface |
|---|---|---|---|---|
| Initial period T = 2.5 s | R = 750 | a = 150 and b = 30 | a = 200 and b = 53 | b = 300 and d = 473 |
| Parameter | b200d250 | b200d380 | b300d380 | b200d380-c |
|---|---|---|---|---|
| b (mm) | 200 | 200 | 300 | 200 |
| d (mm) | 250 | 380 | 380 | 380 |
| c (N∙s/m) | 100 | 100 | 100 | 150 |
| Initial period (s) | 1.6 | 2.4 | 2.0 | 2.5 |
| Input Ground Motion | Magnitude | Occurrence Time | Station | PGA (m/s2) | Time Interval (s) | Total Time (s) | |
|---|---|---|---|---|---|---|---|
| High-frequency | Wo-long | 8.0 | 2008 | 051WCW | 9.58 | 0.005 | 75 |
| 311 | 9.0 | 2011 | IBR005 | 9.67 | 0.01 | 100 | |
| IZMIT | 7.4 | 1999 | Lamont375 | 8.90 | 0.01 | 40 | |
| Intermediate-frequency | ChiChi-TCU084 | 7.6 | 1999 | TCU084 | 10.09 | 0.005 | 75 |
| ELcentro-BCJ | 7.1 | 1940 | BCJ | 3.05 | 0.02 | 54 | |
| Kobe | 6.9 | 1995 | Takarazuka | 6.94 | 0.005 | 51 | |
| Low-frequency | ChiChi-TCU049 | 7.6 | 1999 | TCU049 | 2.44 | 0.005 | 75 |
| ChiChi-TCU122 | 7.6 | 1999 | TCU122 | 2.61 | 0.005 | 50 | |
| 061CHC | 8.0 | 2008 | 061CHC | 1.07 | 0.005 | 100 |
| Test No. | Input Signal | PGA (m/s2) | Test No. | Input Signal | PGA (m/s2) |
|---|---|---|---|---|---|
| 1 | White noise | 2.0 | 22 | Elcentro-BCJ | 0.7 |
| 2 | Wo-long | 0.7 | 23 | Kobe | 0.7 |
| 3 | 311 | 0.7 | 24 | ChiChi-TCU084 | 1.4 |
| 4 | IZMIT | 0.7 | 25 | ELcentro-BCJ | 1.4 |
| 5 | Wo-long | 1.4 | 26 | Kobe | 1.4 |
| 6 | 311 | 1.4 | 27 | ChiChi-TCU084 | 2.0 |
| 7 | IZMIT | 1.4 | 28 | Elcentro-BCJ | 2.0 |
| 8 | Wo-long | 2.0 | 29 | Kobe | 2.0 |
| 9 | 311 | 2.0 | 30 | ChiChi-TCU084 | 4.0 |
| 10 | IZMIT | 2.0 | 31 | Elcentro-BCJ | 4.0 |
| 11 | Wo-long | 4.0 | 32 | Kobe | 4.0 |
| 12 | 311 | 4.0 | 33 | White noise | 2.0 |
| 13 | IZMIT | 4.0 | 34 | ChiChi-TCU049 | 0.7 |
| 14 | Wo-long | 6.2 | 35 | ChiChi-TCU122 | 0.7 |
| 15 | 311 | 6.2 | 36 | 061CHC | 0.7 |
| 16 | IZMIT | 6.2 | 37 | ChiChi-TCU049 | 1.4 |
| 17 | Wo-long | 10.0 | 38 | ChiChi-TCU122 | 1.4 |
| 18 | 311 | 10.0 | 39 | 061CHC | 1.4 |
| 19 | IZMIT | 10.0 | 40 | ChiChi-TCU049 | 2.0 |
| 20 | White noise | 2.0 | 41 | ChiChi-TCU122 | 2.0 |
| 21 | ChiChi-TCU084 | 0.7 | 42 | 061CHC | 2.0 |
| Input Ground Motion | PGA (m/s2) | b200d250 | b200d380 | b300d380 | b200d380-c | ||||
|---|---|---|---|---|---|---|---|---|---|
| x | y | x | y | x | y | x | y | ||
| Wo-long | 0.7 | 49% | 61% | - | - | 38% | 33% | 61% | 62% |
| Wo-long | 1.4 | 68% | 78% | - | - | 60% | 56% | 65% | 84% |
| Wo-long | 2.0 | 70% | 64% | 67% | 62% | 68% | 65% | 80% | 79% |
| Wo-long | 4.0 | 78% | 75% | 80% | 79% | 79% | 75% | 79% | 83% |
| Wo-long | 6.2 | 74% | 74% | 81% | 80% | 80% | 77% | 83% | 84% |
| Wo-long | 10.0 | 78% | 74% | 80% | 80% | 77% | 74% | 70% | 63% |
| Wo-long-average | 69% | 71% | 77% | 75% | 67% | 63% | 73% | 76% | |
| ChiChi-TCU084 | 0.7 | 13% | 23% | - | - | - | - | 29% | 17% |
| ChiChi-TCU084 | 1.4 | 12% | 30% | 23% | 21% | 32% | 26% | 29% | 31% |
| ChiChi-TCU084 | 2.0 | 13% | 38% | 44% | 37% | 22% | 37% | 36% | 36% |
| ChiChi-TCU084 | 4.0 | 29% | 18% | 58% | 30% | 43% | 23% | 51% | 34% |
| ChiChi-TCU084-average | 17% | 27% | 42% | 29% | 32% | 29% | 36% | 30% | |
| ChiChi-TCU122 | 0.7 | 21% | 47% | - | - | - | - | 40% | 49% |
| ChiChi-TCU122 | 1.4 | 20% | 20% | 37% | 36% | 43% | 36% | 37% | 37% |
| ChiChi-TCU122 | 2.0 | 20% | 23% | 40% | 38% | 50% | 38% | 45% | 47% |
| ChiChi-TCU122-average | 20% | 30% | 38% | 37% | 47% | 37% | 41% | 44% | |
| b (m) | d (m) | Damping Coefficient c (N∙s/m) | Friction Coefficient μ | Initial Period (s) | Mass of the Equipment (kg) |
|---|---|---|---|---|---|
| 0.2 | 0.38 | 110 | 0.01 | 2.0 | 70 |
| Peak Displacement | Peak Acceleration | |||||
|---|---|---|---|---|---|---|
| Experiment | Simulation | abs(Sim-Exp)/Exp | Experiment | Simulation | abs(Sim-Exp)/Exp | |
| x-direction | 43.60 mm | 40.70 mm | 6.60% | 1.13 m/s2 | 1.11 m/s2 | 1.76% |
| y-direction | 10.20 mm | 9.90 mm | 3.00% | 0.47 m/s2 | 0.36 m/s2 | 23.40% |
| Peak Displacement | Peak Acceleration | |||||
|---|---|---|---|---|---|---|
| Experiment | Simulation | abs(Sim-Exp)/Exp | Experiment | Simulation | abs(Sim-Exp)/Exp | |
| x-direction | 111.10 mm | 93.00 mm | 16.30% | 1.37 m/s2 | 1.22 m/s2 | 11.00% |
| y-direction | 85.90 mm | 74.70 mm | 13.00% | 1.28 m/s2 | 1.22 m/s2 | 4.70% |
| Peak Displacement | Peak Acceleration | |||||
|---|---|---|---|---|---|---|
| Experiment | Simulation | abs(Sim-Exp)/Exp | Experiment | Simulation | abs(Sim-Exp)/Exp | |
| x-direction | 101.10 mm | 84.60 mm | 16.30% | 1.05 m/s2 | 1.20 m/s2 | 12.50% |
| y-direction | 56.90 mm | 52.30 mm | 8.10% | 0.88 m/s2 | 0.74 m/s2 | 15.90% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pang, H.; Xu, W.; Dai, J.; Jiang, T. Study on a Novel Variable-Frequency Rolling Pendulum Bearing. Buildings 2022, 12, 254. https://doi.org/10.3390/buildings12020254
Pang H, Xu W, Dai J, Jiang T. Study on a Novel Variable-Frequency Rolling Pendulum Bearing. Buildings. 2022; 12(2):254. https://doi.org/10.3390/buildings12020254
Chicago/Turabian StylePang, Hui, Wen Xu, Junwu Dai, and Tao Jiang. 2022. "Study on a Novel Variable-Frequency Rolling Pendulum Bearing" Buildings 12, no. 2: 254. https://doi.org/10.3390/buildings12020254