

Using a Smart Living Environment Simulation Tool and Machine Learning to Optimize the Home Sensor Network Configuration for Measuring the Activities of Daily Living of Older People



Abstract
:
1. Introduction
2. Related Work
3. Materials and Methods
3.1. User’s Profile
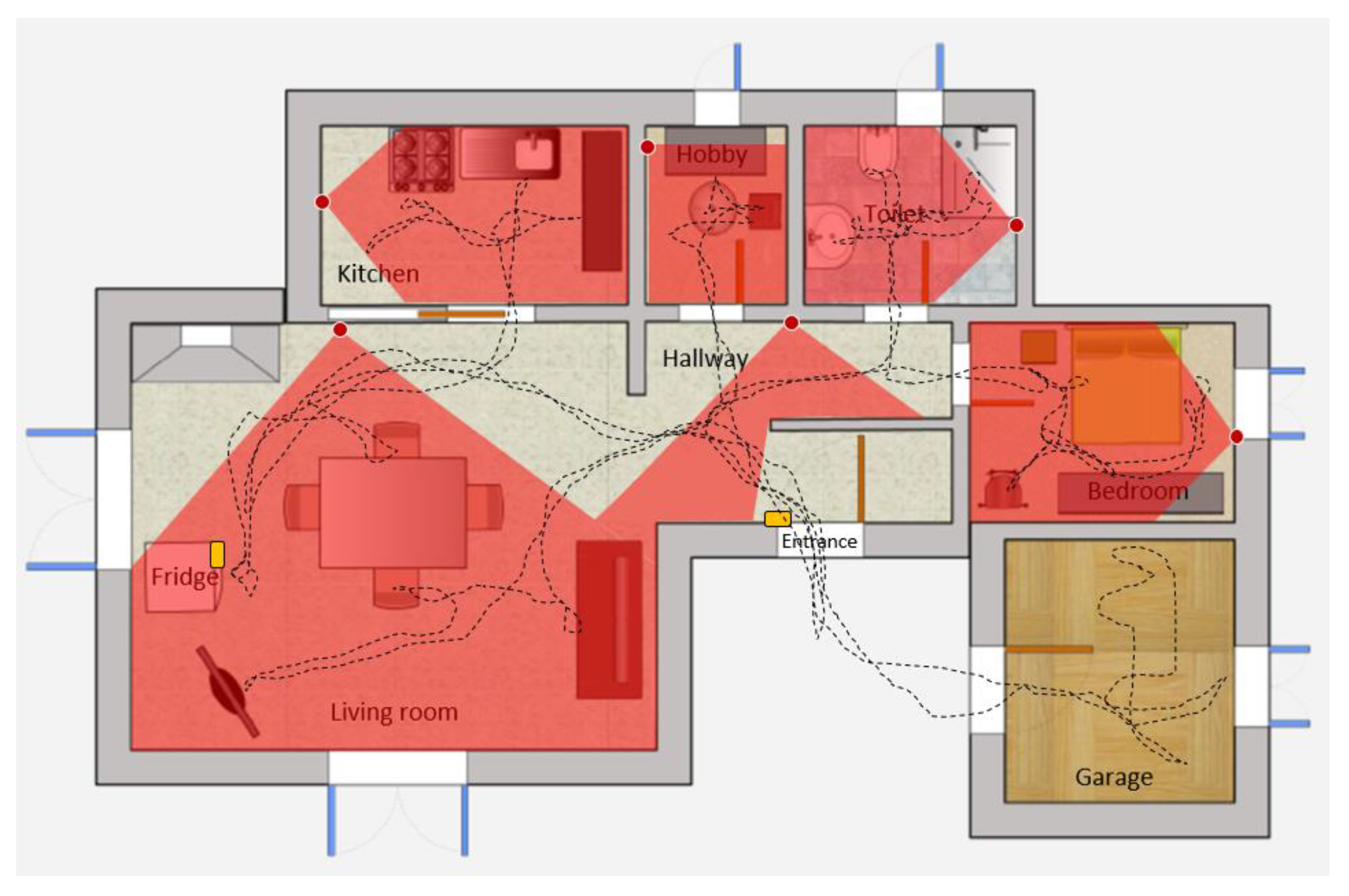
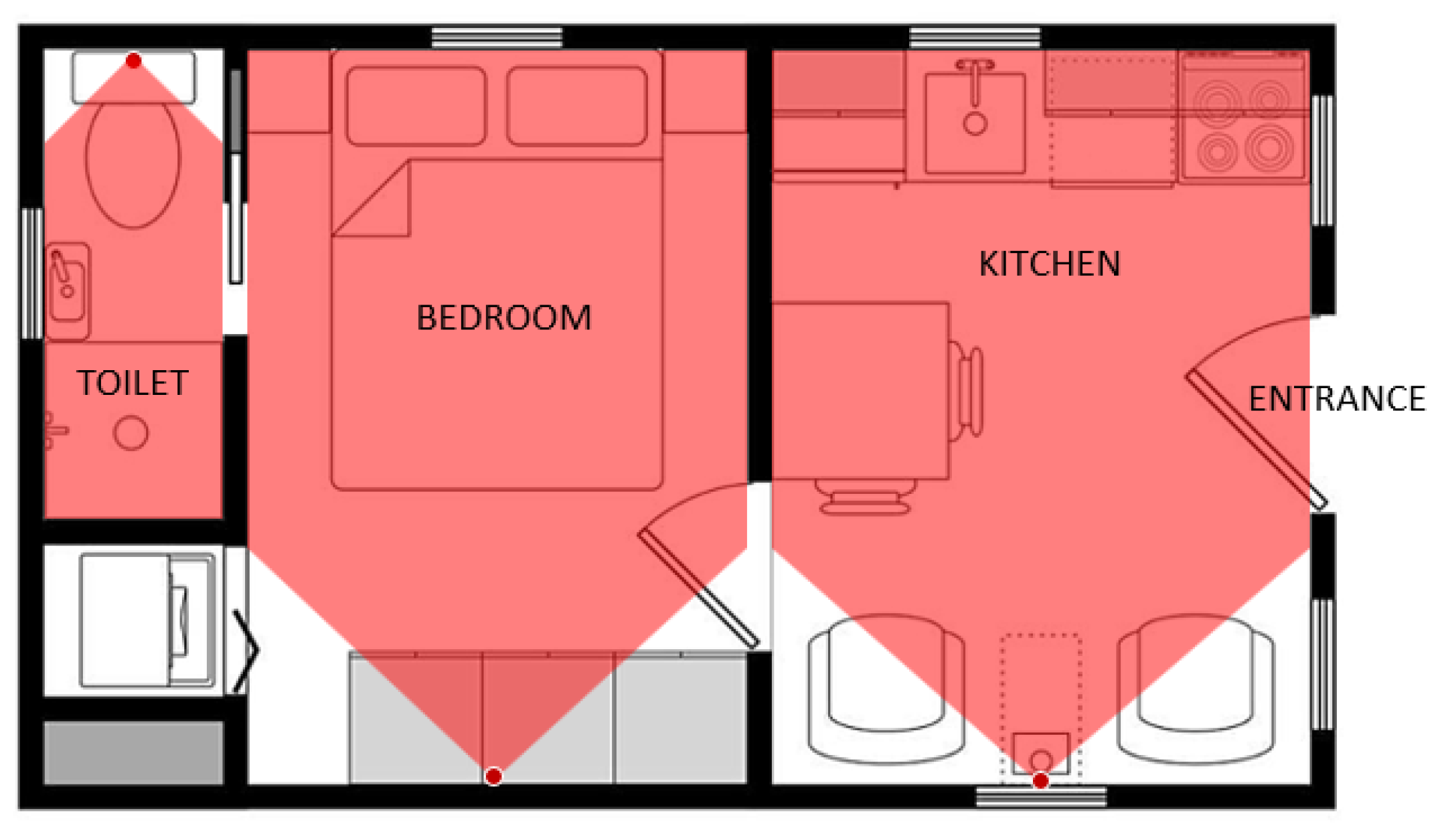
3.2. Environment Characteristics
3.3. Sensors’ Characteristics
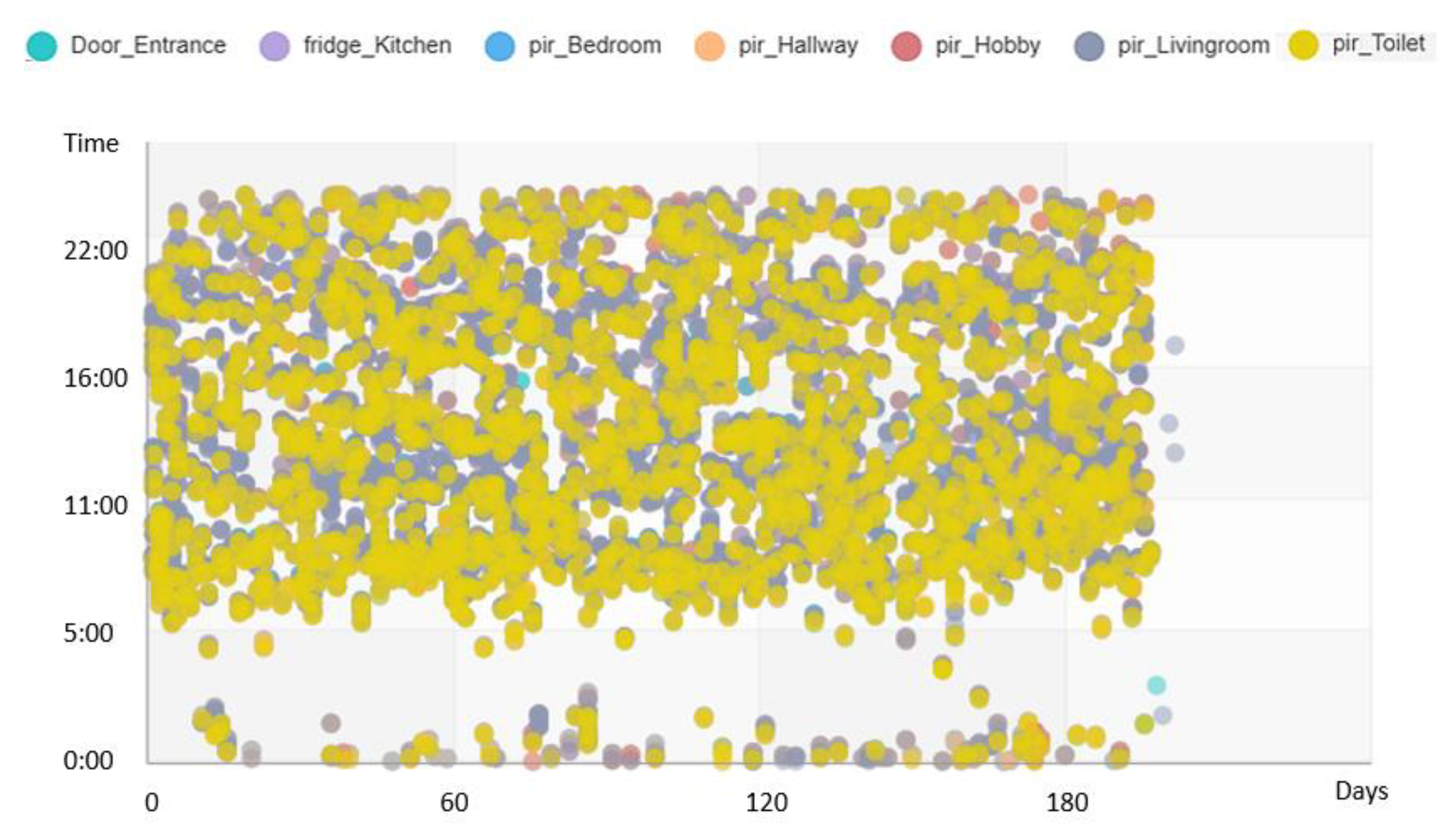
3.4. Data Simulation
3.5. Data Validation
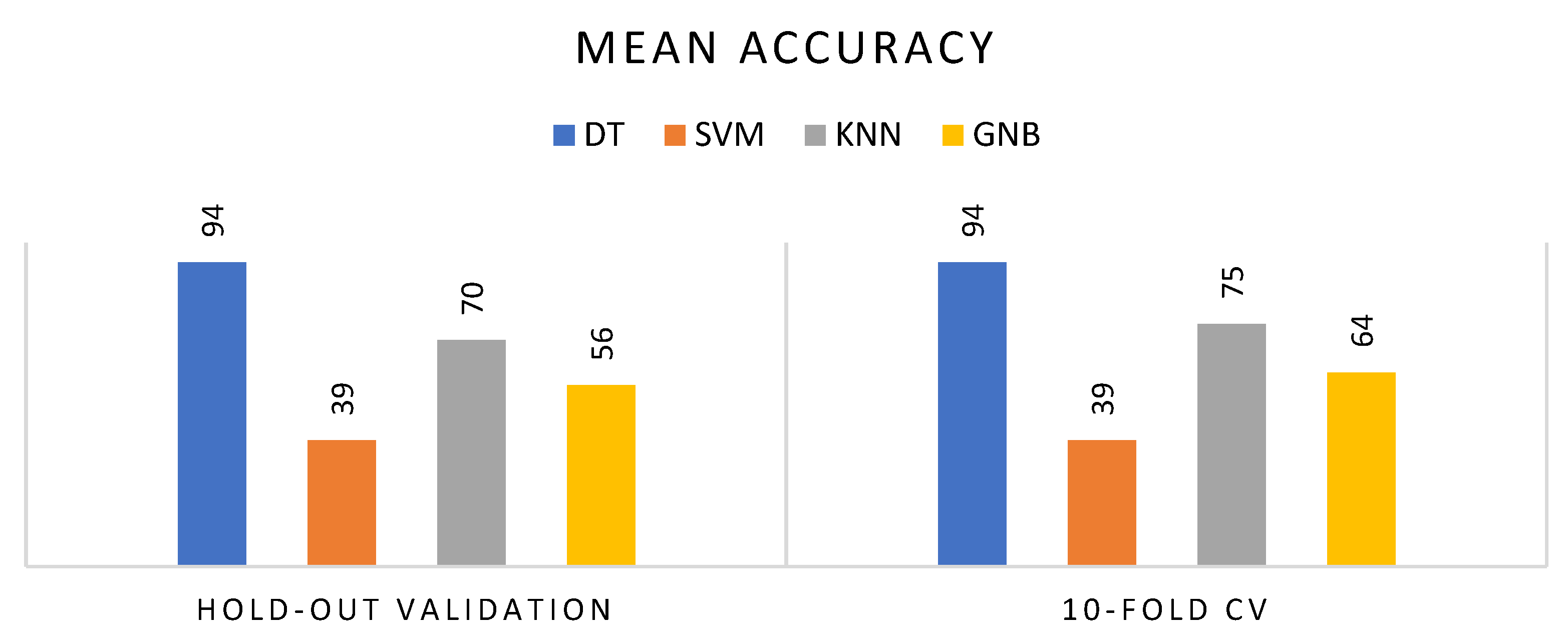
3.6. ADLs Classification and Evaluation Metric
3.7. Case Study 1
3.8. Case Study 2
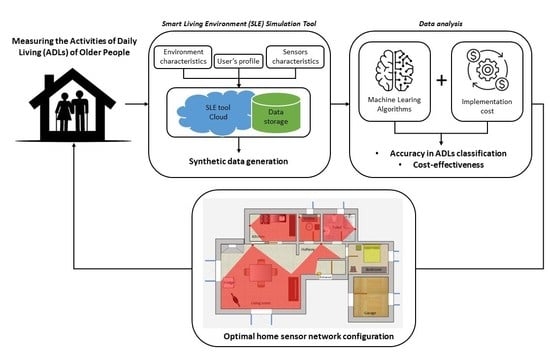
- -
- Identify which are the relevant ADLs to be measured for the older user.
- -
- Design different configurations of the home sensor network and recreate them in the SLE simulator.
- -
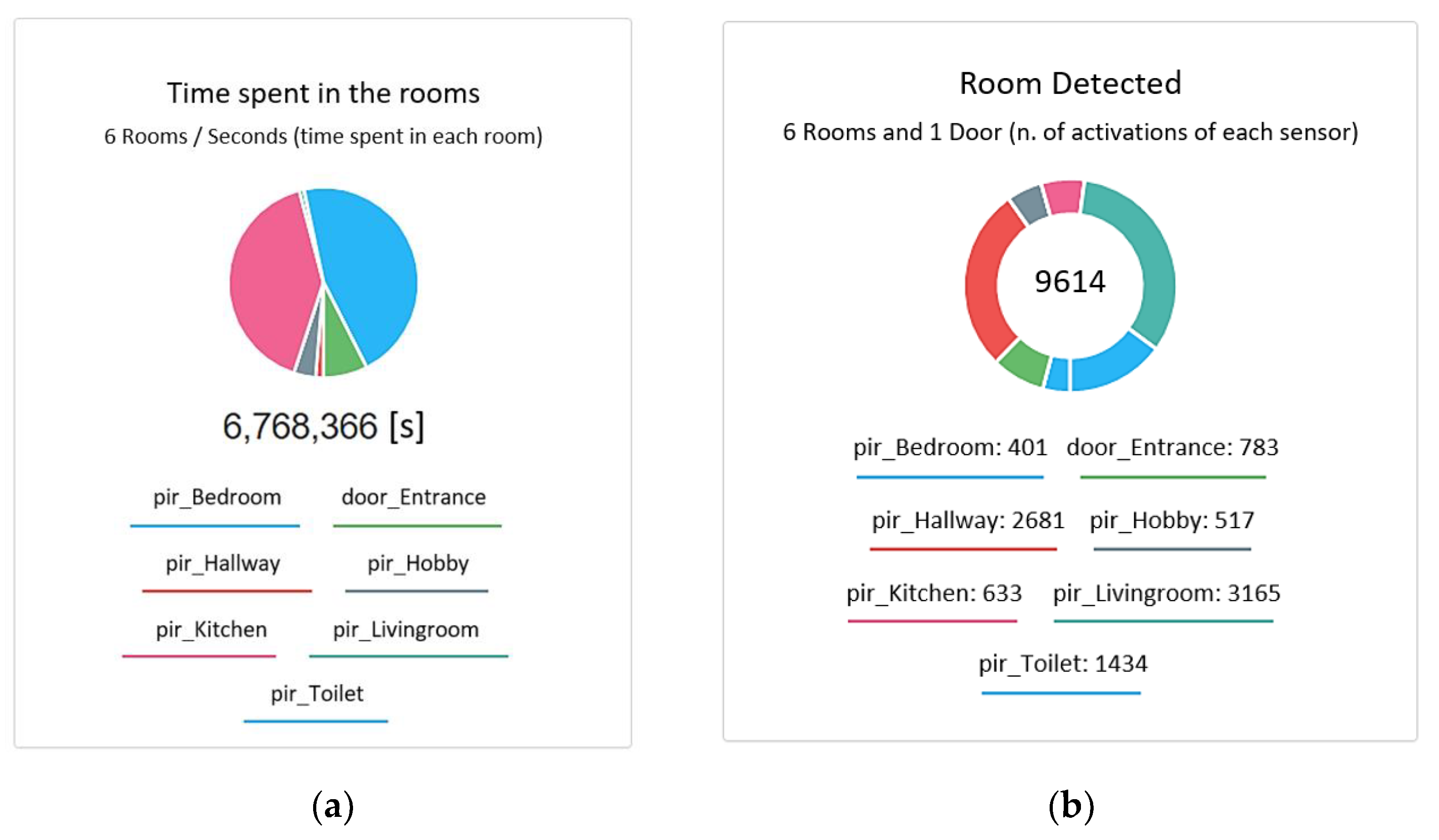
- Simulate the behaviour of the older user via the SLE tool to generate a consistent dataset of sensor activations.
- -
- Analyze the obtained dataset through ML algorithms and evaluate which configuration best measures the user’s ADLs (highest accuracy in ADLs classification).
- -
- Finally, the optimization of the home sensor network configuration is given by a cost-effectiveness analysis, in terms of ADL classification accuracy and the cost of the installed sensor network.
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Andò, B.; Baglio, S.; Castorina, S.; Crispino, R.; Marletta, V. Advanced Sensing Solutions for Ambient Assisted Living: The NATIFLife Framework. IEEE Instrum. Meas. Mag. 2020, 23, 33–40. [Google Scholar] [CrossRef]
- Casaccia, S.; Romeo, L.; Calvaresi, A.; Morresi, N.; Monteriù, A.; Frontoni, E.; Scalise, L.; Revel, G.M. Measurement of Users’ Well-Being Through Domotic Sensors and Machine Learning Algorithms. IEEE Sens. J. 2020, 20, 8029–8038. [Google Scholar] [CrossRef]
- Naccarelli, R.; Casaccia, S.; Revel, G. The Problem of Monitoring Activities of Older People in Multi-Resident Scenarios: An Innovative and Non-Invasive Measurement System Based on Wearables and PIR Sensors. Sensors 2022, 22, 3472. [Google Scholar] [CrossRef] [PubMed]
- Pietroni, F.; Casaccia, S.; Revel, G.M.; Scalise, L. Methodologies for Continuous Activity Classification of User through Wearable Devices: Feasibility and Preliminary Investigation. In Proceedings of the 2016 IEEE Sensors Applications Symposium (SAS), Catania, Italy, 20–22 April 2016; pp. 1–6. [Google Scholar]
- Casaccia, S.; Naccarelli, R.; Moccia, S.; Migliorelli, L.; Frontoni, E.; Revel, G.M. Development of a Measurement Setup to Detect the Level of Physical Activity and Social Distancing of Ageing People in a Social Garden during COVID-19 Pandemic. Measurement 2021, 184, 109946. [Google Scholar] [CrossRef]
- Ooi, B.Y.; Beh, W.L.; Lee, W.; Shirmohammadi, S. Using the Cloud to Improve Sensor Availability and Reliability in Remote Monitoring. IEEE Trans. Instrum. Meas. 2019, 68, 1522–1532. [Google Scholar] [CrossRef]
- Massaroni, C.; Nicolò, A.; Schena, E.; Sacchetti, M. Remote Respiratory Monitoring in the Time of COVID-19. Front. Physiol. 2020, 11, 635. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, Y.; Liu, H. Unobtrusive Sensor-Based Occupancy Facing Direction Detection and Tracking Using Advanced Machine Learning Algorithms. IEEE Sens. J. 2018, 18, 6360–6368. [Google Scholar] [CrossRef]
- Sprint, G.L.; Cook, D.J.; Fritz, R. Behavioral Differences Between Subject Groups Identified Using Smart Homes and Change Point Detection. IEEE J. Biomed. Health Inform. 2020, 25, 559–567. [Google Scholar] [CrossRef]
- De, P.; Chatterjee, A.; Rakshit, A. PIR Sensor Based AAL Tool for Human Movement Detection: Modified MCP Based Dictionary Learning Approach. IEEE Trans. Instrum. Meas. 2020, 69, 7377–7385. [Google Scholar] [CrossRef]
- Chowdhury, D.; Chattopadhyay, M. Development of a Low Power Microcontroller Based Wrist-Worn Device with Resource Constrained Activity Detection Algorithm. IEEE Trans. Instrum. Meas. 2020, 69, 7522–7529. [Google Scholar] [CrossRef]
- Xing, Y.; Wang, T.; Zhou, F.; Hu, A.; Li, G.; Peng, L. EVAL Cane: Non-Intrusive Monitoring Platform with a Novel Gait-Based User Identification Scheme. IEEE Trans. Instrum. Meas. 2020, 70, 1–15. [Google Scholar] [CrossRef]
- Gochoo, M.; Tan, T.; Liu, S.; Jean, F.; Alnajjar, F.; Huang, S. Unobtrusive Activity Recognition of Elderly People Living Alone Using Anonymous Binary Sensors and DCNN. IEEE J. Biomed. Health Inform. 2018, 23, 693–702. [Google Scholar] [CrossRef] [PubMed]
- Mora, N.; Grossi, F.; Russo, D.; Barsocchi, P.; Hu, R.; Brunschwiler, T.; Michel, B.; Cocchi, F.; Montanari, E.; Nunziata, S.; et al. IoT-Based Home Monitoring: Supporting Practitioners’ Assessment by Behavioral Analysis. Sensors 2019, 19, 3238. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Piau, A.; Lepage, B.; Bernon, C.; Gleizes, M.-P.; Nourhashemi, F. Real-Time Detection of Behavioral Anomalies of Older People Using Artificial Intelligence (The 3-PEGASE Study): Protocol for a Real-Life Prospective Trial. JMIR Res. Protoc. 2019, 8, e14245. [Google Scholar] [CrossRef]
- Shirali, M.; Bayo Montón, J.; Fernandez-Llatas, C.; Ghassemian, M.; Traver, V. Design and Evaluation of a Solo-Resident Smart Home Testbed for Mobility Pattern Monitoring and Behavioural Assessment. Sensors 2020, 20, 7167. [Google Scholar] [CrossRef]
- Doyle, J.; Kealy, A.; Loane, J.; Walsh, L.; O’Mullane, B.; Flynn, C.; Macfarlane, A.; Bortz, B.; Knapp, R.B.; Bond, R. An Integrated Home-Based Self-Management System to Support the Wellbeing of Older Adults. J. Ambient Intell. Smart Environ. 2014, 6, 359–383. [Google Scholar] [CrossRef] [Green Version]
- Eisa, S.; Moreira, A. A Behaviour Monitoring System (BMS) for Ambient Assisted Living. Sensors 2017, 17, 1946. [Google Scholar] [CrossRef] [Green Version]
- Casaccia, S.; Revel, G.M.; Scalise, L.; Bevilacqua, R.; Rossi, L.; Paauwe, R.A.; Karkowsky, I.; Ercoli, I.; Artur Serrano, J.; Suijkerbuijk, S.; et al. Social Robot and Sensor Network in Support of Activity of Daily Living for People with Dementia. In Proceedings of the Dementia Lab 2019. Making Design Work: Engaging with Dementia in Context, Eindhoven, The Netherlands, 21–22 October 2019; Brankaert, R., IJsselsteijn, W., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 128–135. [Google Scholar]
- Casaccia, S.; Jokinen, K.; Naccarelli, R.; Revel, G.M. Well-Being and Comfort of Ageing People Based on Indoor Environmental Conditions: Preliminary Study on Human-Coach Conversation. In Proceedings of the 2022 IEEE International Workshop on Metrology for Living Environment (MetroLivEn), Cosenza, Italy, 25–27 May 2022; pp. 164–169. [Google Scholar]
- Alshammari, N.; Alshammari, T.; Sedky, M.; Champion, J.; Bauer, C. OpenSHS: Open Smart Home Simulator. Sensors 2017, 17, 1003. [Google Scholar] [CrossRef] [Green Version]
- Synnott, J.; Nugent, C.; Jeffers, P. Simulation of Smart Home Activity Datasets. Sensors 2015, 15, 14162–14179. [Google Scholar] [CrossRef]
- Renoux, J.; Klugl, F. Simulating daily activities in a smart home for data generation. In Proceedings of the 2018 Winter Simulation Conference (WSC), Gothenburg, Sweden, 9–12 December 2018; pp. 798–809. [Google Scholar]
- Buchmayr, M.; Kurschl, W.; Küng, J. A Simulator for Generating and Visualizing Sensor Data for Ambient Intelligence Environments. Procedia Comput. Sci. 2011, 5, 90–97. [Google Scholar] [CrossRef]
- Helal, S.; Lee, J.W.; Hossain, S.; Kim, E.; Hagras, H.; Cook, D. Persim—Simulator for Human Activities in Pervasive Spaces. In Proceedings of the 2011 Seventh International Conference on Intelligent Environments, Nottingham, UK, 25–28 July 2011; pp. 192–199. [Google Scholar]
- Kormányos, B.; Pataki, B. Multilevel Simulation of Daily Activities: Why and How? In Proceedings of the 2013 IEEE International Conference on Computational Intelligence and Virtual Environments for Measurement Systems and Applications (CIVEMSA), Milan, Italy, 13–17 July 2013; pp. 1–6. [Google Scholar]
- Bouchard, K.; Ajroud, A.; Bouchard, B.; Bouzouane, A. SIMACT: A 3D Open Source Smart Home Simulator for Activity Recognition with Open Database and Visual Editor. Int. J. Hybrid Inf. Technol. (IJHIT) 2012, 5, 13–32. [Google Scholar]
- Park, J.; Moon, M.; Hwang, S.; Yeom, K. CASS: A Context-Aware Simulation System for Smart Home. In Proceedings of the 5th ACIS International Conference on Software Engineering Research, Management & Applications (SERA 2007), Washington, DC, USA, 20–22 August 2007; pp. 461–467. [Google Scholar]
- Caruso, M.; Ilban, Ç.; Leotta, F.; Mecella, M.; Vassos, S. Synthesizing Daily Life Logs through Gaming and Simulation. In Proceedings of the 2013 ACM Conference on Pervasive and Ubiquitous Computing Adjunct Publication, Zurich, Switzerland, 8–12 September 2013; Association for Computing Machinery: New York, NY, USA, 2013; pp. 451–460. [Google Scholar]
- Synnott, J.; Chen, L.; Nugent, C.D.; Moore, G. The Creation of Simulated Activity Datasets Using a Graphical Intelligent Environment Simulation Tool. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; pp. 4143–4146. [Google Scholar]
- Ariani, A.; Redmond, S.J.; Chang, D.; Lovell, N.H. Simulation of a Smart Home Environment. In Proceedings of the 2013 3rd International Conference on Instrumentation, Communications, Information Technology and Biomedical Engineering (ICICI-BME), Bandung, Indonesia, 7–8 November 2013; pp. 27–32. [Google Scholar]
- Nishikawa, H.; Yamamoto, S.; Tamai, M.; Nishigaki, K.; Kitani, T.; Shibata, N.; Yasumoto, K.; Ito, M. UbiREAL: Realistic Smartspace Simulator for Systematic Testing. In Proceedings of the UbiComp 2006: Ubiquitous Computing, Orange County, CA, USA, 17–21 September 2006; Dourish, P., Friday, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 459–476. [Google Scholar]
- Casaccia, S.; Rosati, R.; Scalise, L.; Revel, G.M. Measurement of Activities of Daily Living: A Simulation Tool for the Optimisation of a Passive Infrared Sensor Network in a Smart Home Environment. In Proceedings of the 2020 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Dubrovnik, Croatia, 25–28 May 2020; pp. 1–6. [Google Scholar]
- Pirozzi, M. Development of a Simulation Tool for Measurements and Analysis of Simulated and Real Data to Identify ADLs and Behavioral Trends through Statistics Techniques and ML Algorithms. Ph.D. Thesis, Univeristà Politecnica delle Marche, Ancona, Italy, 2020. [Google Scholar]
- Atallah, L.; Lo, B.; Ali, R.; King, R.; Yang, G.-Z. Real-Time Activity Classification Using Ambient and Wearable Sensors. IEEE Trans. Inf. Technol. Biomed. 2009, 13, 1031–1039. [Google Scholar] [CrossRef] [PubMed]
- Ariani, A.; Redmond, S.J.; Chang, D.; Lovell, N.H. Software Simulation of Unobtrusive Falls Detection at Night-Time Using Passive Infrared and Pressure Mat Sensors. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 2115–2118. [Google Scholar]
- Hu, Y.-J.; Yu, M.-C.; Wang, H.-A.; Ting, Z.-Y. A Similarity-Based Learning Algorithm Using Distance Transformation. IEEE Trans. Knowl. Data Eng. 2015, 27, 1452–1464. [Google Scholar] [CrossRef]
- Francillette, Y.; Bouchard, B.; Bouchard, K.; Gaboury, S. Modeling, Learning, and Simulating Human Activities of Daily Living with Behavior Trees. Knowl. Inf. Syst. 2020, 62, 3881–3910. [Google Scholar] [CrossRef]
- Roy, P.C.; Bouchard, B.; Bouzouane, A.; Giroux, S. Ambient Activity Recognition in Smart Environments for Cognitive Assistance. Available online: www.igi-global.com/article/ambient-activity-recognition-in-smart-environments-for-cognitive-assistance/95226 (accessed on 1 October 2020).
- Mohanapriya, M.; Lekha, J. Comparative Study between Decision Tree and Knn of Data Mining Classification Technique. J. Phys. Conf. Ser. 2018, 1142, 012011. [Google Scholar] [CrossRef]
- Rahmadani, S.; Dongoran, A.; Zarlis, M.; Zakarias. Comparison of Naive Bayes and Decision Tree on Feature Selection Using Genetic Algorithm for Classification Problem. J. Phys. Conf. Ser. 2018, 978, 012087. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ML Algorithm | Hyperparameter | Value |
|---|---|---|
| DT | Criterion | Gini |
| Min. samples split | 2 | |
| Min. samples leaf | 1 | |
| Max. depth | None | |
| SVM | C | 1 |
| Kernel | rbf | |
| Gamma | 1/n° features | |
| KNN | n° of nearest neighbors | 3 |
| GNB | No parameter | - |
| Configurations | ML Algorithms | Precision [%] | Recall [%] | F1-Score [%] | Accuracy [%] |
|---|---|---|---|---|---|
| 1 | DT | 98 | 98 | 98 | 98 |
| SVM | 11 | 34 | 50 | 34 | |
| KNN | 85 | 81 | 82 | 81 | |
| GNB | 11 | 32 | 50 | 32 | |
| 2 | DT | 99 | 99 | 99 | 99 |
| SVM | 15 | 38 | 56 | 38 | |
| KNN | 58 | 76 | 87 | 76 | |
| GNB | 92 | 95 | 98 | 95 | |
| 3 | DT | 98 | 98 | 98 | 98 |
| SVM | 15 | 39 | 56 | 38 | |
| KNN | 36 | 52 | 45 | 52 | |
| GNB | 87 | 88 | 89 | 89 |
| Configurations | ML Algorithms | Precision [%] | Recall [%] | F1-Score [%] | Accuracy [%] |
|---|---|---|---|---|---|
| 1 | DT | 94 | 90 | 90 | 99 |
| SVM | 4 | 11 | 7 | 34 | |
| KNN | 70 | 69 | 66 | 94 | |
| GNB | 25 | 31 | 37 | 34 | |
| 2 | DT | 99 | 99 | 99 | 99 |
| SVM | 4 | 11 | 6 | 38 | |
| KNN | 70 | 70 | 69 | 93 | |
| GNB | 74 | 79 | 76 | 95 | |
| 3 | DT | 99 | 99 | 99 | 99 |
| SVM | 40 | 6 | 8 | 40 | |
| KNN | 80 | 80 | 79 | 97 | |
| GNB | 82 | 86 | 83 | 90 |
| Configurations | Cost [GBP] |
|---|---|
| 1 | 900 |
| 2 | 1000 |
| 3 | 850 |
| Configurations | ML Algorithms | Precision [%] | Recall [%] | F1-Score [%] | Accuracy [%] |
|---|---|---|---|---|---|
| 1 | DT | 98 | 98 | 98 | 98 |
| SVM | 10 | 31 | 48 | 31 | |
| KNN | 45 | 64 | 81 | 64 | |
| GNB | 37 | 56 | 77 | 56 | |
| 2 | DT | 91 | 91 | 91 | 91 |
| SVM | 24 | 49 | 59 | 49 | |
| KNN | 79 | 80 | 79 | 80 | |
| GNB | 48 | 50 | 54 | 50 | |
| 3 | DT | 93 | 94 | 94 | 94 |
| SVM | 15 | 39 | 56 | 39 | |
| KNN | 46 | 65 | 81 | 65 | |
| GNB | 56 | 61 | 93 | 61 |
| Configurations | ML Algorithms | Precision [%] | Recall [%] | F1-Score [%] | Accuracy [%] |
|---|---|---|---|---|---|
| 1 | DT | 94 | 94 | 94 | 97 |
| SVM | 6 | 2 | 9 | 30 | |
| KNN | 56 | 56 | 53 | 63 | |
| GNB | 46 | 60 | 51 | 69 | |
| 2 | DT | 93 | 91 | 92 | 91 |
| SVM | 25 | 50 | 33 | 50 | |
| KNN | 60 | 75 | 83 | 80 | |
| GNB | 43 | 57 | 53 | 51 | |
| 3 | DT | 83 | 82 | 81 | 94 |
| SVM | 10 | 25 | 14 | 37 | |
| KNN | 71 | 70 | 68 | 82 | |
| GNB | 72 | 75 | 73 | 73 |
| Configurations | Cost [GBP] |
|---|---|
| 1 | 450 |
| 2 | 300 |
| 3 | 400 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Naccarelli, R.; Casaccia, S.; Pirozzi, M.; Revel, G.M. Using a Smart Living Environment Simulation Tool and Machine Learning to Optimize the Home Sensor Network Configuration for Measuring the Activities of Daily Living of Older People. Buildings 2022, 12, 2213. https://doi.org/10.3390/buildings12122213
Naccarelli R, Casaccia S, Pirozzi M, Revel GM. Using a Smart Living Environment Simulation Tool and Machine Learning to Optimize the Home Sensor Network Configuration for Measuring the Activities of Daily Living of Older People. Buildings. 2022; 12(12):2213. https://doi.org/10.3390/buildings12122213
Chicago/Turabian StyleNaccarelli, Riccardo, Sara Casaccia, Michela Pirozzi, and Gian Marco Revel. 2022. "Using a Smart Living Environment Simulation Tool and Machine Learning to Optimize the Home Sensor Network Configuration for Measuring the Activities of Daily Living of Older People" Buildings 12, no. 12: 2213. https://doi.org/10.3390/buildings12122213