1. Introduction
The 3D mapping of indoor environments is beneficial for many applications, such as the documentation of constructions or historical buildings (e.g., [
1,
2]), building diagnostics (e.g., [
3]), the life cycle of buildings (e.g., [
4]), and building information modeling (BIM) (e.g., [
5,
6,
7]). There are many methods with which to collect data from indoor environments, such as terrestrial laser scanning (TLS) (e.g., [
8,
9]), photogrammetry (e.g., [
10,
11]), using depth cameras (e.g., [
12,
13]), and using simultaneous localization and mapping (SLAM) laser scanners (LSs) (e.g., [
14,
15]). Not all of the techniques are suitable in every indoor mapping application because of their limitations. Photogrammetry is time consuming and often hampered by ambient light. Depth cameras require specific lighting. The SLAM LS is currently at centimeter level accuracy. Though TLS is accurate, it is expensive and the most limiting factor is its static data collection principle, which only provides a limited number of observation points in the capturing of often polymorphic structures [
3,
16].
For years TLS has been widely used in the 3D measurement of indoor environments. It enables high-quality point clouds with high accuracy (0.1–5 mm) and precision (0.6–4 mm), and a high level of detail [
17]. As a result, it has become common practice to utilize TLS as a reference system when testing, for example, more affordable scanning systems (e.g., [
18]). However, in a large and complex indoor environment, TLS requires a multitude of scanning positions in order to obtain sufficient data. This increases the amount of time required to cover the whole environment. Besides this, when the measurements of the indoor space required being georeferenced, it becomes a necessity to collect additional data with TLS and/or traditional surveying/measuring methods in order to establish a common coordinate system and tie the observations to that. In particular, moving from one room to another typically requires extra work in order to ensure accurate georeferencing. This also increases the time spent on the data collection [
19,
20,
21]. In indoor environments, it is laborious to register non-overlapping spaces together by creating extra TLS scans to connect non-overlapping point clouds (e.g., the spaces/rooms at different ends of a corridor). When the only purpose is the registration of the non-overlapping data, it creates excessive unnecessary work, measurements, data, time cost, etc. Another option for registering these non-overlapping point clouds is to use geodetic surveying methods to measure tie points, which is time consuming and also needs extra equipment and expertise.
SLAM LSs have been used for indoor mapping for some years; they have been used in, for example, construction sites, modern buildings, cultural heritage sites, and open spaces (e.g., [
14,
22,
23]). The SLAM LSs are fast for data collection because they are mostly handheld or backpack systems and the data collection only requires walking around the environment. Besides this, it works without a global navigation satellite system (GNSS), which enables the use of a mobile laser scanner in environments that do not have satellite coverage. A SLAM LS is typically designed to be as simple as possible to use. The user does not have to be an expert, though application requirements and the optimal measurement trajectory should preferably be considered/understood. However, based on the results of prior studies, the accuracy of SLAM LSs are at the centimeter level [
22,
24,
25,
26]. While several papers mention the efficiency of SLAM systems in obtaining comprehensive data from complex indoor environments, we were not successful in finding earlier works that utilize a SLAM LS as a reference frame for other point cloud data sets [
14,
27,
28]. The integration of these two techniques would solve the laboriousness of acquiring georeferenced TLS data and overcoming the reduced accuracy of SLAM. It would add even more productivity and quality as the new technologies have done during past years for construction [
29,
30]
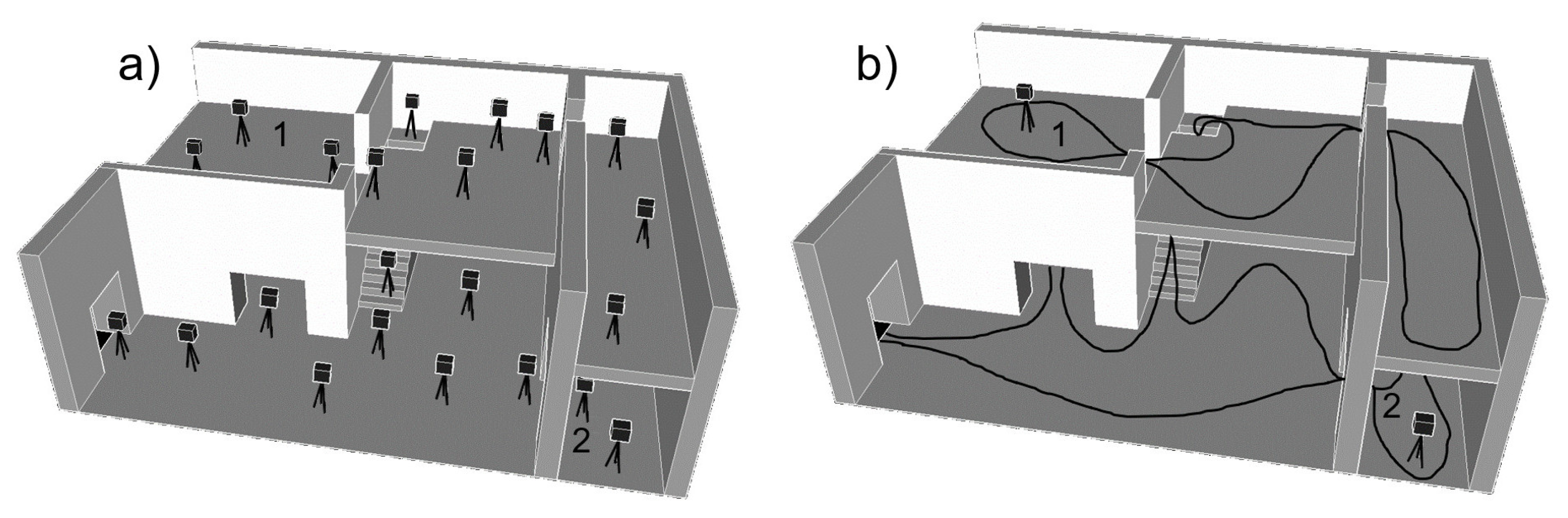
This study aims to introduce a novel strategy for the registration of non-overlapping TLS data with the support of SLAM LS data in order to collect geometrically coherent building interior data. This enables more effective data collection in large and complex buildings because it is possible to prioritize spaces according to their need for point cloud accuracy. The spaces that demand the highest accuracy can be measured with TLS. In large buildings, it is not necessarily demanded to have millimeter-level accuracy in every space of the building, the high-accuracy spaces can be registered to each other by using a rapid and easily adaptable SLAM LS point cloud. By combining the advantages of both the TLS and SLAM LS methods, we can not only execute the data collection of large buildings more effectively and get the demanded accuracy for the requested spaces but can also reconstruct the overall geometry of the floor plans or interiors. This approach creates comprehensive point cloud information on the environment. More precisely, the aim is to establish both the accuracy of the non-overlapping TLS point cloud registration with SLAM LS data support and how much the shorter SLAM LS walking path influences the accuracy of non-overlapping TLS point clouds. We present the method employed, demonstrate its use in an indoor mapping case, and investigate the 3D mapping accuracy.
5. Discussion
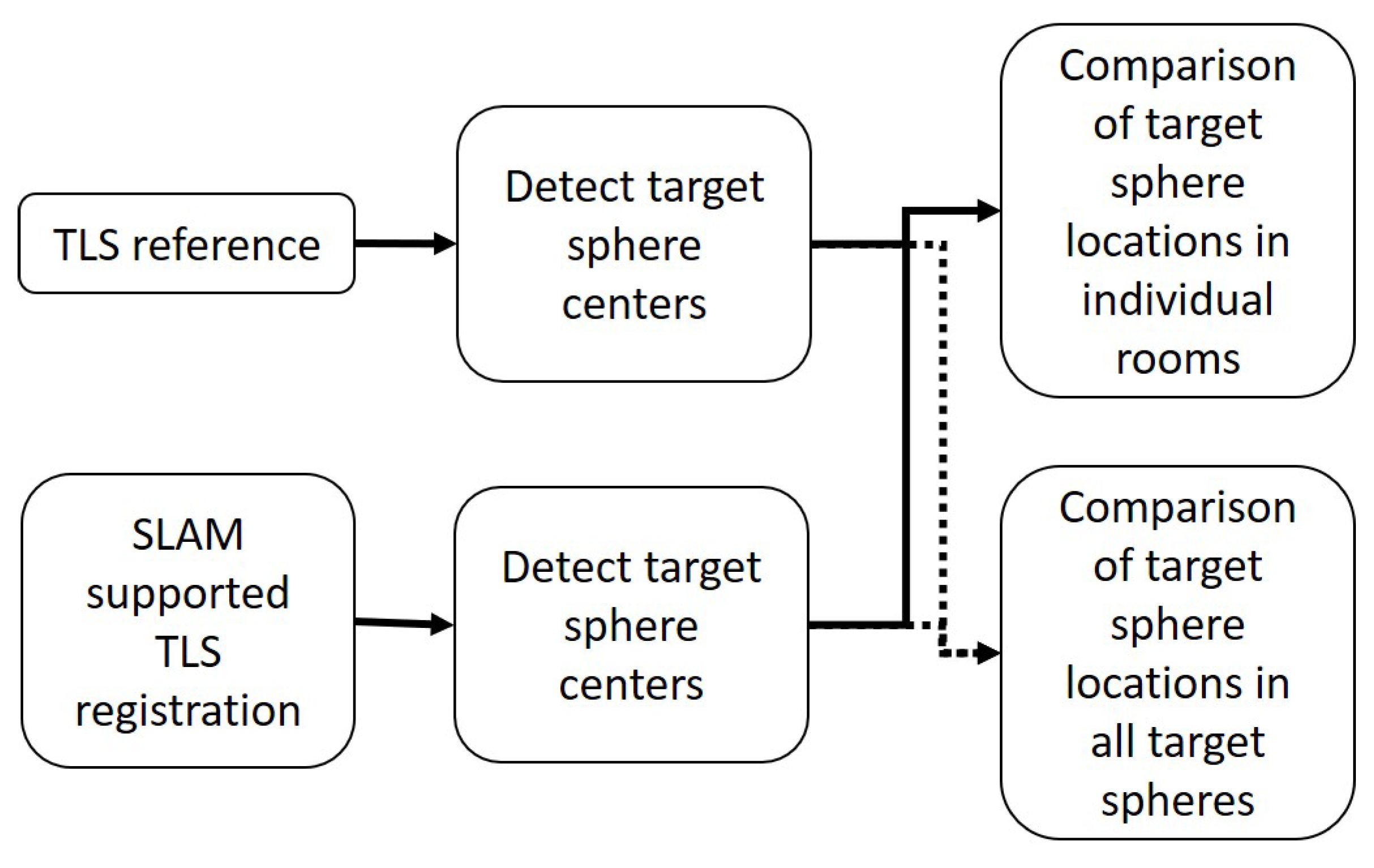
Our experiment showed that the non-overlapping TLS point clouds of the rooms can be located with SLAM support (TLS
room) to an accuracy of 39.96 mm for a mapping path that covers the whole room (the SLAM
Cover path) and 34.94 mm for the mapping path that only briefly visits the room in the proximity of the door (the SLAM
Brief path) in the target sphere comparison. (
Table 6). The results of the target sphere analysis are very close in both paths. The results indicate that SLAM LS-supported non-overlapping TLS point cloud registration is possible with reasonable accuracy. Especially when the result accuracy is compared to the laboriousness of the TLS measurements. With TLS we need to collect data from the rooms and from the hallways between the rooms that will add remarkably collection time. During this study, we have proven that data collection time can be minimized with SLAM LS measurements and the accuracy of the TLS room locations is reasonable. The improvement of data collection time was 72% compared to TLS measurements. For this reason, this approach provides a comprehensive point cloud of a building with the required accuracy of the application, for example BIM, with less labor involved in creating extra TLS stations to connect non-overlapping or weakly overlapping point clouds in complex geometries/building environments.
The alignment accuracy of the SLAM point cloud to the reference was 14.84 mm for SLAM
Cover path and 11.99 mm for SLAM
Brief path (
Table 4). The errors of individual targets were 11.91–17.69 for SLAM
Cover path and 7.52–16.45 for SLAM
Brief path. Both of these paths align well at the 10 mm level considering the relative accuracy of the SLAM system to be 10–30 mm. The TLS measured rooms could be registered to the SLAM point cloud with a best accuracy of 5 mm, while the worst case provided 20 mm when individual target sphere errors was 3–28 mm (
Table 5). The TLS rooms registered to the SLAM
Cover path between 7.03–8.86 mm accuracy. The corresponding values for SLAM
Brief path were higher in every room except Room 1. The accuracy was 16.07–19.84 mm for Rooms 2, 3, 4, and 5.08 mm for Room 1. The registration of TLS rooms to SLAM point cloud functions as expected in Rooms 2, 3, and 4 with SLAM
Brief path. The SLAM
Brief had fewer data and the registration accuracy became weaker. However, in Room 1 registration does not provide coherent result. The difference could be due to the SLAM path. The SLAM
Brief path may not detect enough features during the beginning of the measurement leading to small misalignment in the SLAM LS point cloud. This small misalignment has probably happened after Room 1 because the registration value of Room 1 is very close to those of the SLAM
Cover path. After Room 1 the misalignment spread through the path and led to larger values for the registrations of Rooms 2, 3, and 4.
Even though there were differences in the TLS room registrations between the SLAM paths (
Table 5) it has only a very small impact on the target sphere comparison of all rooms (
Table 6). Based on these results SLAM
Brief path has a small impact on the results when we compare it to the SLAM
Cover path. However, the paths have small differences also outside the rooms, which may have more impact on the SLAM LS point cloud than the changes in the paths in the rooms. Before the possible misalignment of the SLAM
Brief path, the 3D distances of the target spheres are on the same scale as with the SLAM
Cover path. The values of the 3D distances differ only by circa 15 mm in SLAM
Cover path (31.67–49.87 mm) and the value of Room 1 of SLAM
Brief path is also on the same scale with a value of 41.54 mm. After the misalignment of the SLAM
Brief path, the values differ more than 18.25–51.20 mm (
Table 6). Because the misalignment of the SLAM
Brief path has happened after Room 1 and on the other hand before Room 2 (
Table 5 and
Table 6) it appears that the overall path has more impact on the SLAM-supported non-overlapping TLS room registration than the visiting time of the rooms.
In addition, there is a possibility that the size of the room has an impact on the TLS room location in the SLAM LS supported registration. There is a difference between larger and smaller rooms in both paths. In the SLAM
Cover path, the error difference is circa 10 mm larger in smaller rooms (under 25 m
2) than in bigger rooms (over 90 m
2), and circa 20 mm larger in bigger rooms than in smaller rooms with SLAM
Brief path (
Table 6). It appears that the smaller rooms require less data with SLAM LS than bigger rooms for an accurate TLS room registration and the opposite for the bigger rooms. Based on these results the combination of the SLAM LS paths would be best. The size of the rooms should affect the SLAM LS path in the rooms. In bigger rooms, we should use SLAM
Cover path, and in smaller rooms SLAM
Brief path. The combination would lead to better results for SLAM LS-supported non-overlapping TLS room registration. Based on the results, SLAM LS is more affected by the overall path and room sizes than the small difference between SLAM
Cover and SLAM
Brief paths within the rooms.
The SLAM LS has some disadvantages. These have been listed in many of the earlier studies experimenting with GeoSLAM LSs. SLAM has problems when the environment is elongated and narrow or exceedingly large (in terms of scanner range performance) with a lack of features, such as furniture or other objects that are suitable as geometric targets for robust matching, or an open space [
56,
57]. Lidar-based SLAM requires features at small intervals in every environment and the measurements demand paths with closed loops to improve the internal geometric integrity [
51]. In most indoor environments, there are naturally a sufficient number of geometric features at sufficiently short intervals/distances, while environments with insufficient/disadvantageous geometric properties are a minority. However, in such cases it is possible to add features to the obvious areas with disadvantageous characteristics in order to overcome the SLAM deficiencies in environments, such as narrow corridors, for example, by adding furniture or other objects, or opening doors to provide additional surfaces with geometric variance in order to help the SLAM and other data registration. Besides this, the ranging performance of the particular sensor restricts perception [
39,
58]. Most of the indoor environments have features within the 30 m range, which is typically even well suited for the short-sighted SLAM LSs. The tested GeoSLAM Zeb Horizon equipped with a Velodyne VLP-16 exhibits a relatively long-range performance that is suitable for outdoor and even UAV applications [
59].
The spatial error of any particular SLAM solution will cumulate with the increased time spent on the data collection [
60]. This needs to be considered when assessing the value of the proposed methods. For a GeoSLAM LS, the maximum data collection time is 30 min, and during that time, the error will be contained provided that the requirements for the system operation are considered. Because of these listed disadvantages, the operations require reasonable planning before mapping the environment [
25]. Furthermore, TLS scanning requires planning, and in comparison with that, planning for SLAM LS mapping is easier. SLAM LS point cloud collection does not take substantial time. For this reason, with a SLAM LS, it is possible to collect data from the desired site twice in order to make sure that the system works correctly in the environment.
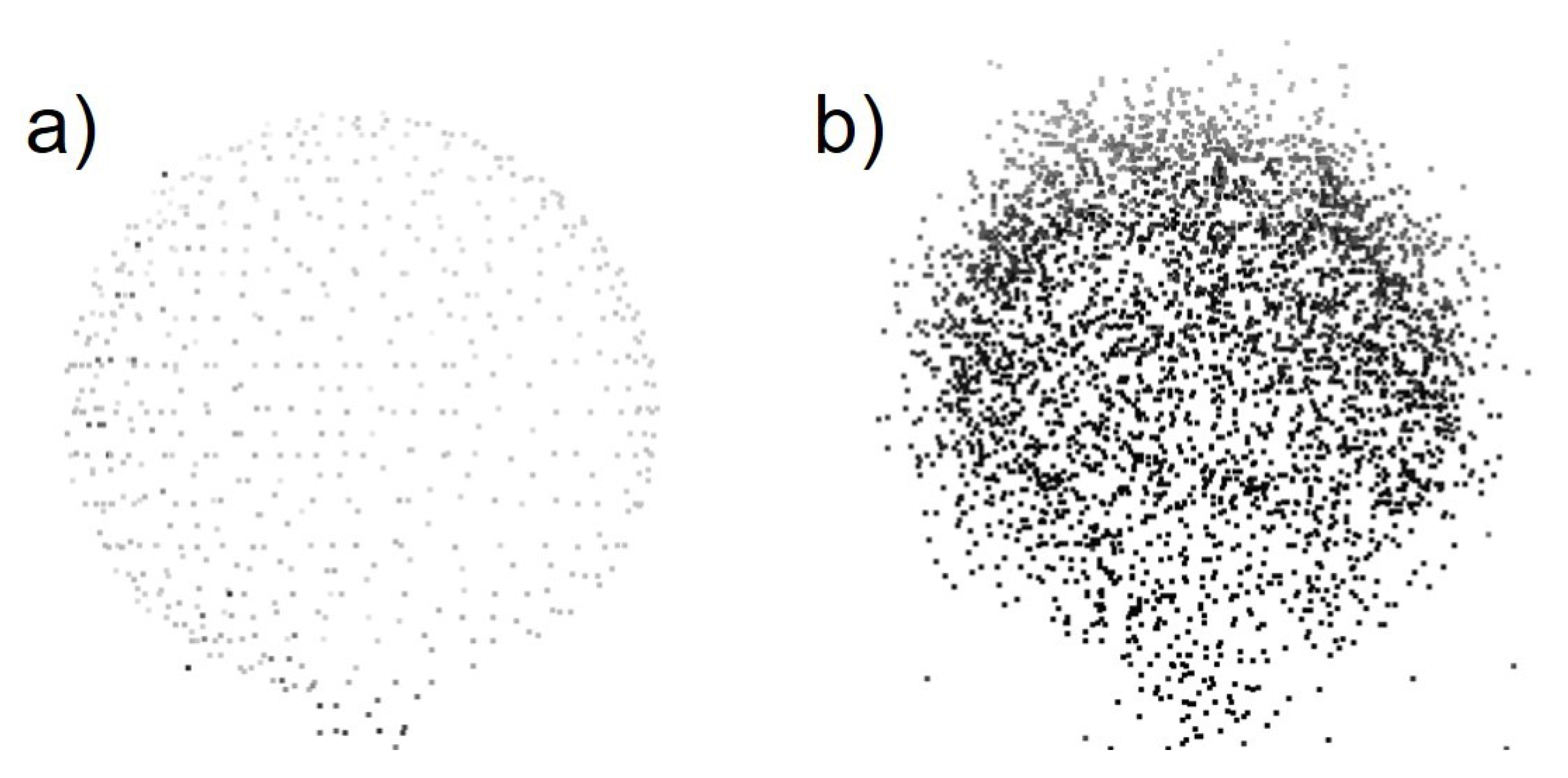
The point density of SLAM LS point clouds depends on measurement distances from the scanner to the features and mapping speed [
57]. The data is especially noisy in areas where the walking speed is slower [
39,
41,
57]. Because of noise, it is difficult to recognize small objects that are under 3 cm in size or the placements of windows [
24,
41]. Despite this fact, it was possible to reach a sufficient point density in order to locate non-overlapping TLS point clouds in an indoor environment with the accuracy of 39.96 mm for the mapping path that covers virtually the whole room (the SLAM
Cover path) and with the accuracy of 34.94 mm for the mapping path that only briefly visited the room in the proximity of the door (the SLAM
Brief path). The indoor environment of the case study represents an office interior. The results demonstrate that the noise of the SLAM LS system does not hugely affect the registration and 3D mapping accuracy of the TLS point clouds.
The georeferencing of the SLAM LS point cloud requires control points. However, not all the GeoSLAM systems can use plane targets [
22,
61]. The introduced method will not remove the need for control. The targets need to be chosen with consideration of the sensor capacity. However, it is also possible to use the method with cloud-based registration to another georeferenced point cloud.
The represented method of TLS 3D mapping with SLAM support is faster than TLS. The data acquisition time is circa 1 h including the measurements for the individual TLS rooms and using SLAM LS for the hallways. For the same area, the TLS reference is collected in 3.5 h. However, the used TLS device Leica RTC360 can also use visual odometry to improve the data collection time; it will not be as fast as the represented combination of SLAM and TLS. As an alternative method, it would be possible to use other sensors, such as a depth camera, in the case of using SLAM LS. However, Chen et al. [
27] studied that the depth camera, as the Matterport 3D camera, has weaker accuracy and lower point density than tested SLAM methods.
This method could be expanded to integrate the indoor environments into the outside world. In this case, the SLAM data also needs to be collected outside the building, as we did. The outdoor SLAM point cloud needs to cover enough features that it is possible to integrate it with existing outdoor point clouds—such as aerial, mobile laser scanner point clouds—or other reference data. The SLAM point cloud can contain both outdoor and indoor measurements because SLAM enables data collection in complex environments with the opportunity to move easily from one environment to another [
40,
60]. In this case, the registration of the SLAM point cloud with the existing outdoor point cloud would be the first step in the registration. The rest of the steps would be the same as without the outdoor integration. The SLAM LS point cloud collection is faster than TLS and the point cloud can be easily expanded to cover areas that are easier to georeference, such as the lower floors of high buildings.


 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}