
Pareto-Based Bi-Objective Optimization Method of Sensor Placement in Structural Health Monitoring

Abstract
:1. Introduction
2. Single-Objective Criteria for Sensor Placement
2.1. Criterion of Minimum Estimation Error of Modal Coordination (EI Criterion)
2.2. Criterion of Maximum Structural Modal Kinetic Energy (MSMKE Criterion)
2.3. Criterion of Structural Modal Independence (SMI Criterion)
3. Pareto Based Bi-Objective OSP
3.1. Theory of Pareto-Based Bi-Objective Optimization
3.2. Bi-Objective Optimization Functions for Sensor Placement
- (1)
- Objective function for EI and MSMKE criteria
- (2)
- Objective function for SMI and MSMKE criteria
- (3)
- Objective function for EI and SMI
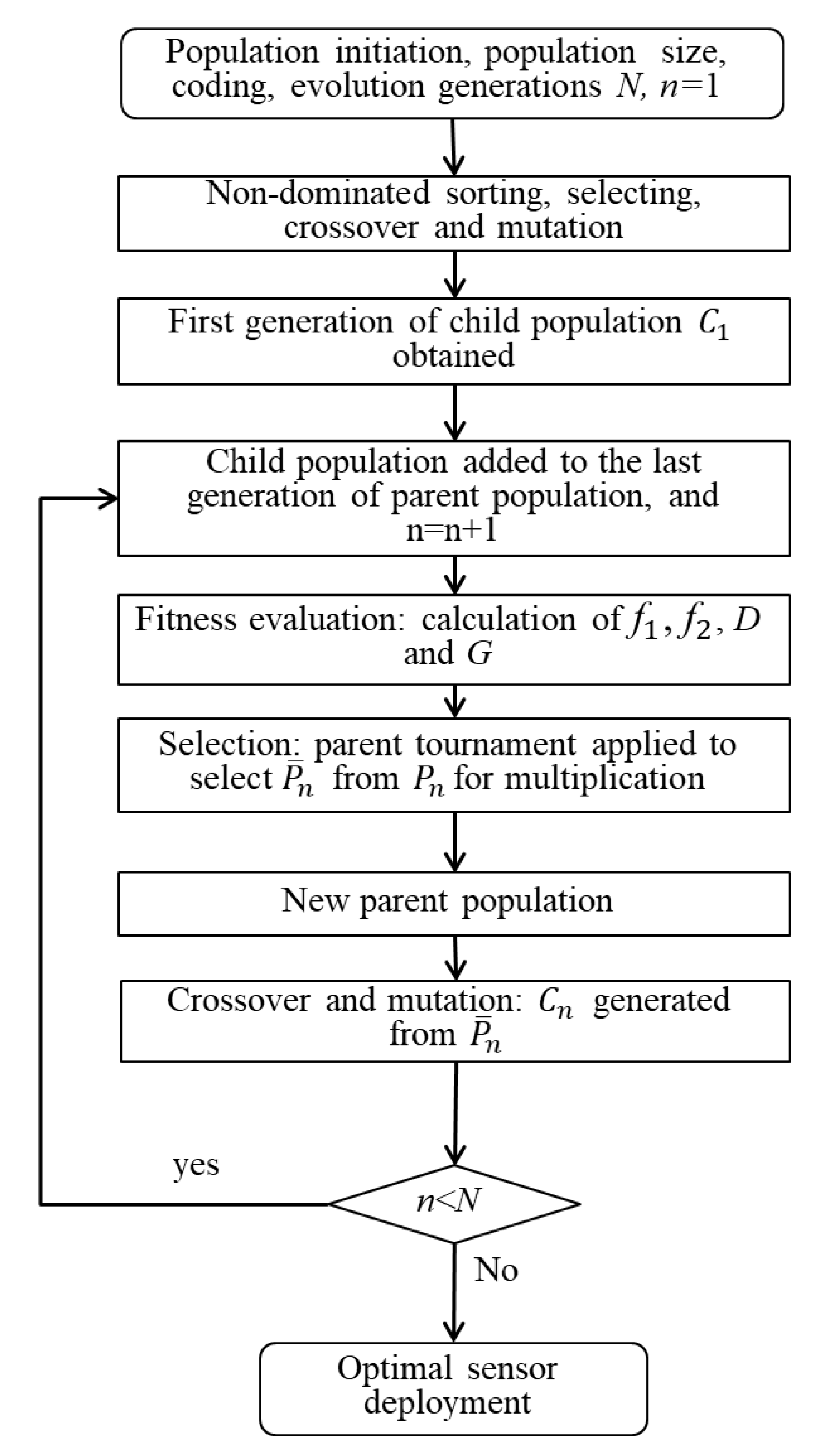
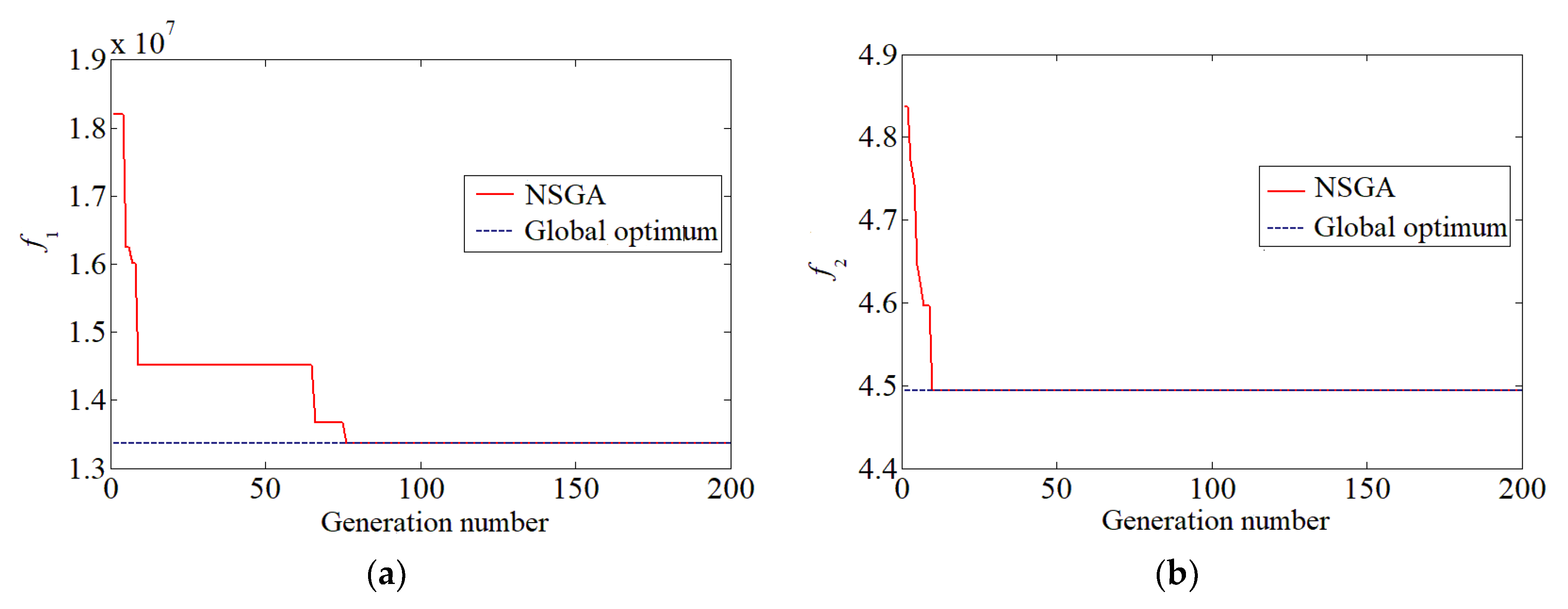
3.3. Solving of Pareto Based Bi-Objective OSP
- (1)
- Population initiation
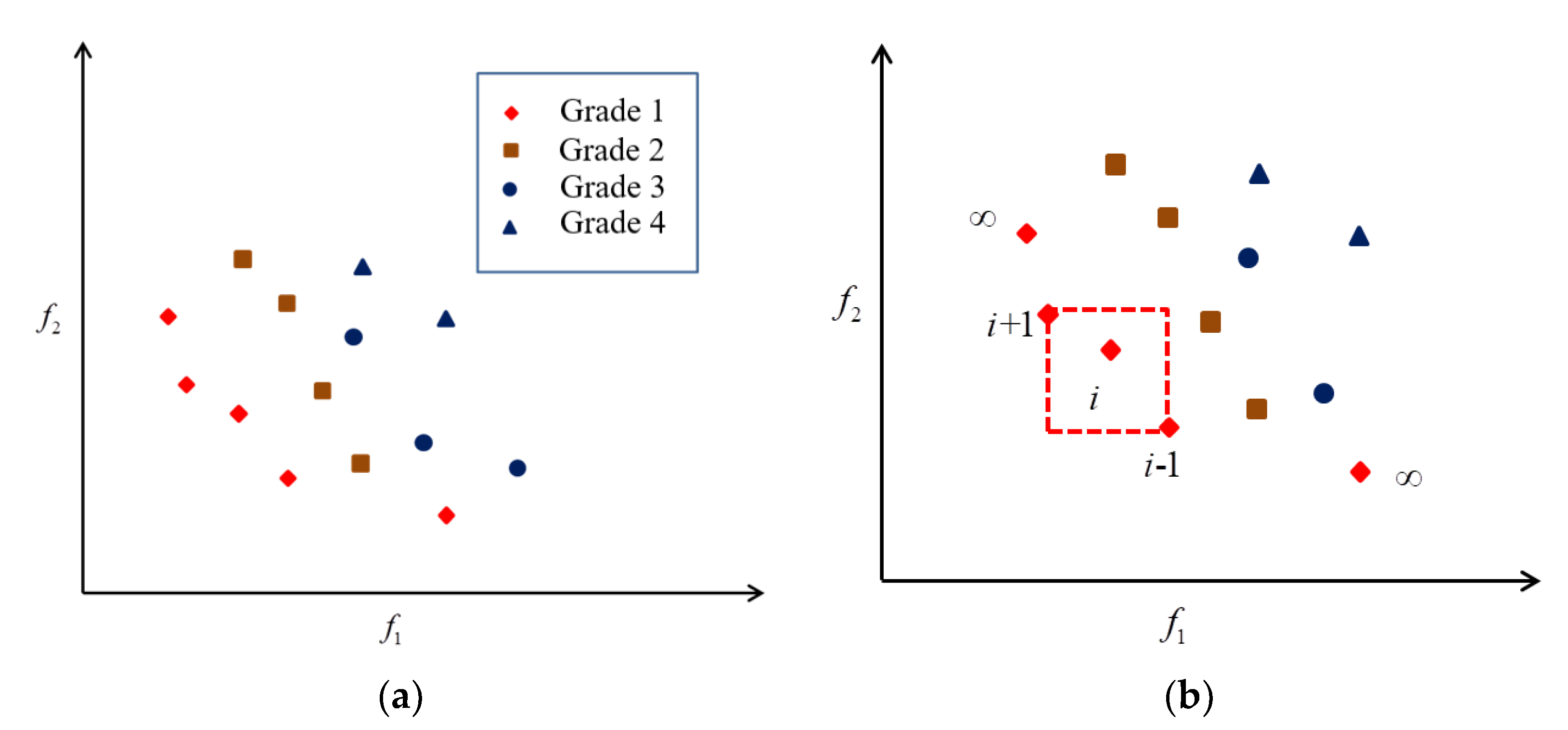
- (2)
- Non-dominated sorting and crowding distance of individuals
- (3)
- Selection
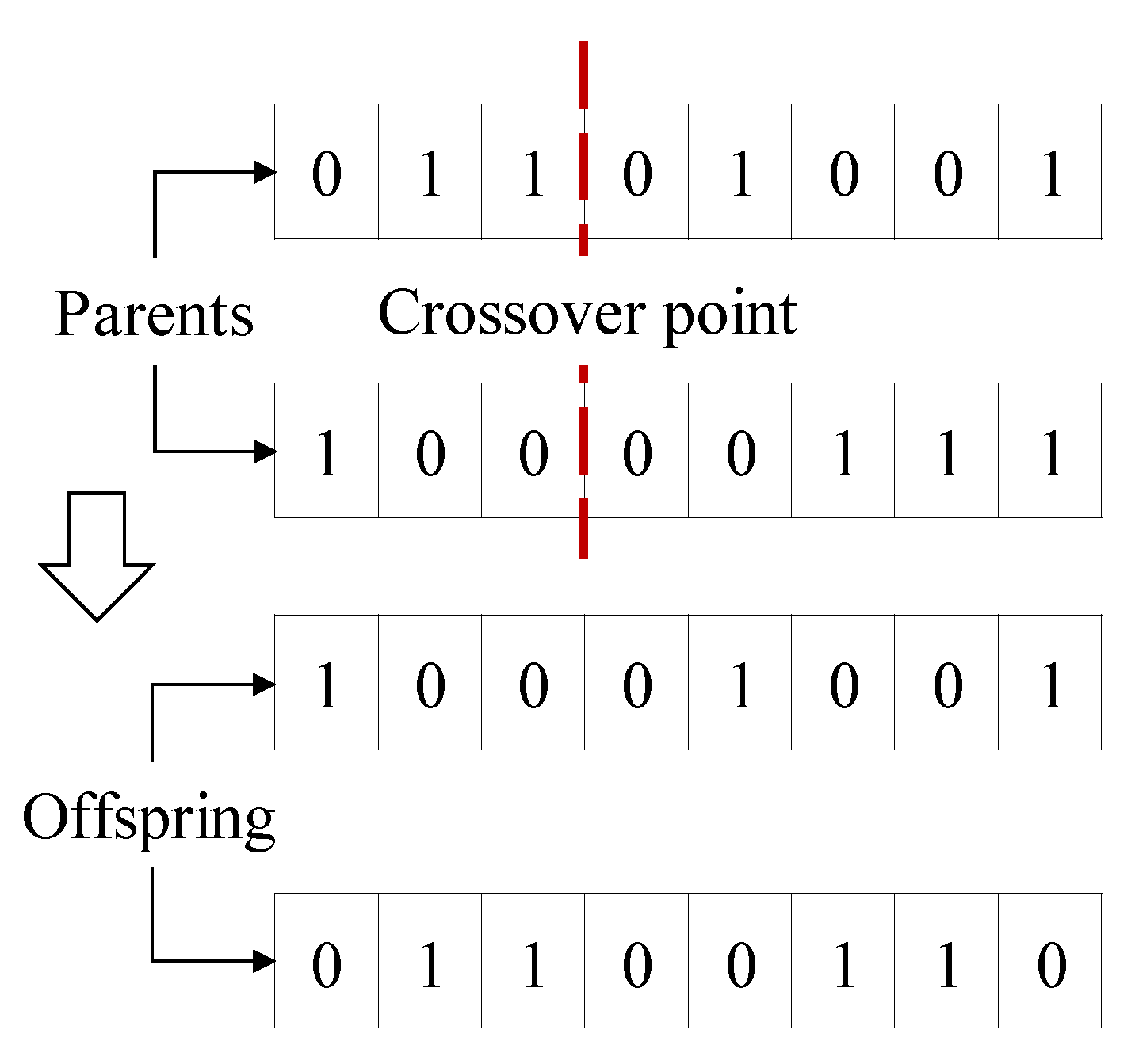
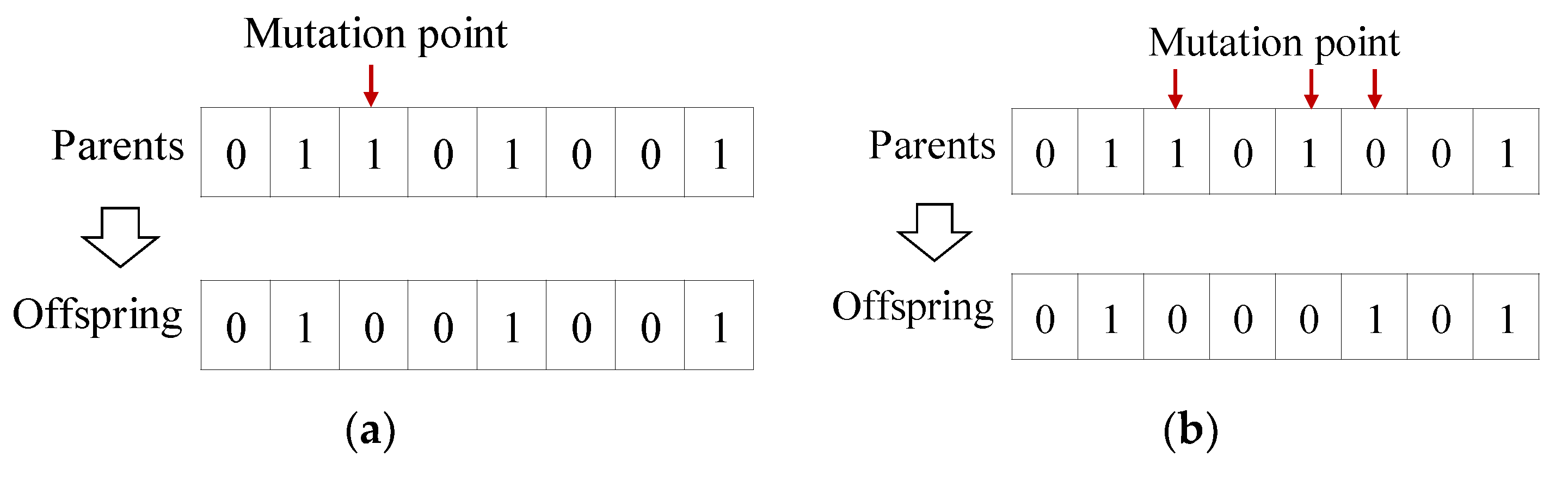
- (4)
- Crossover and mutation
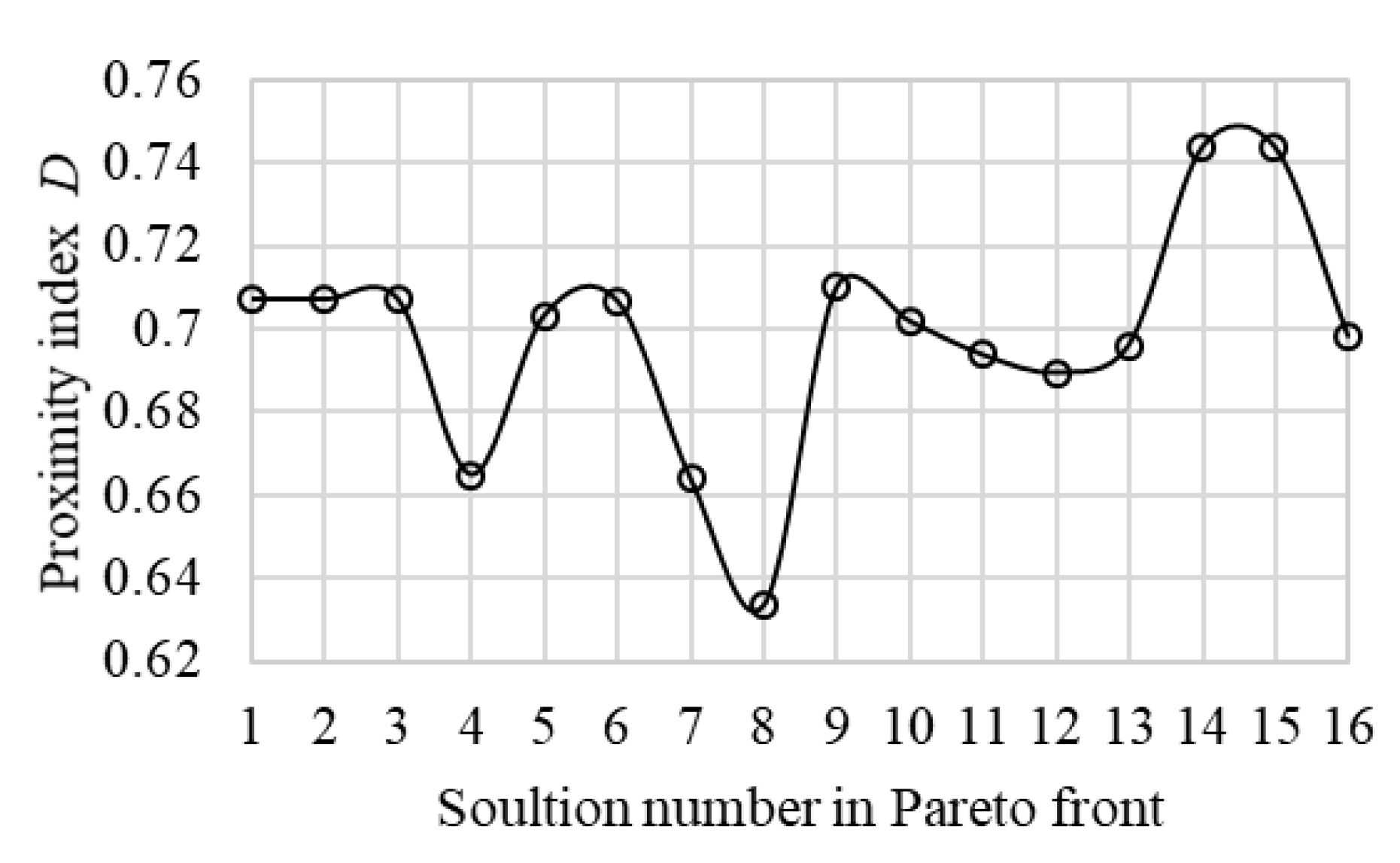
3.4. Comprehensive Evaluation Criteria for Pareto Solutions of OSP
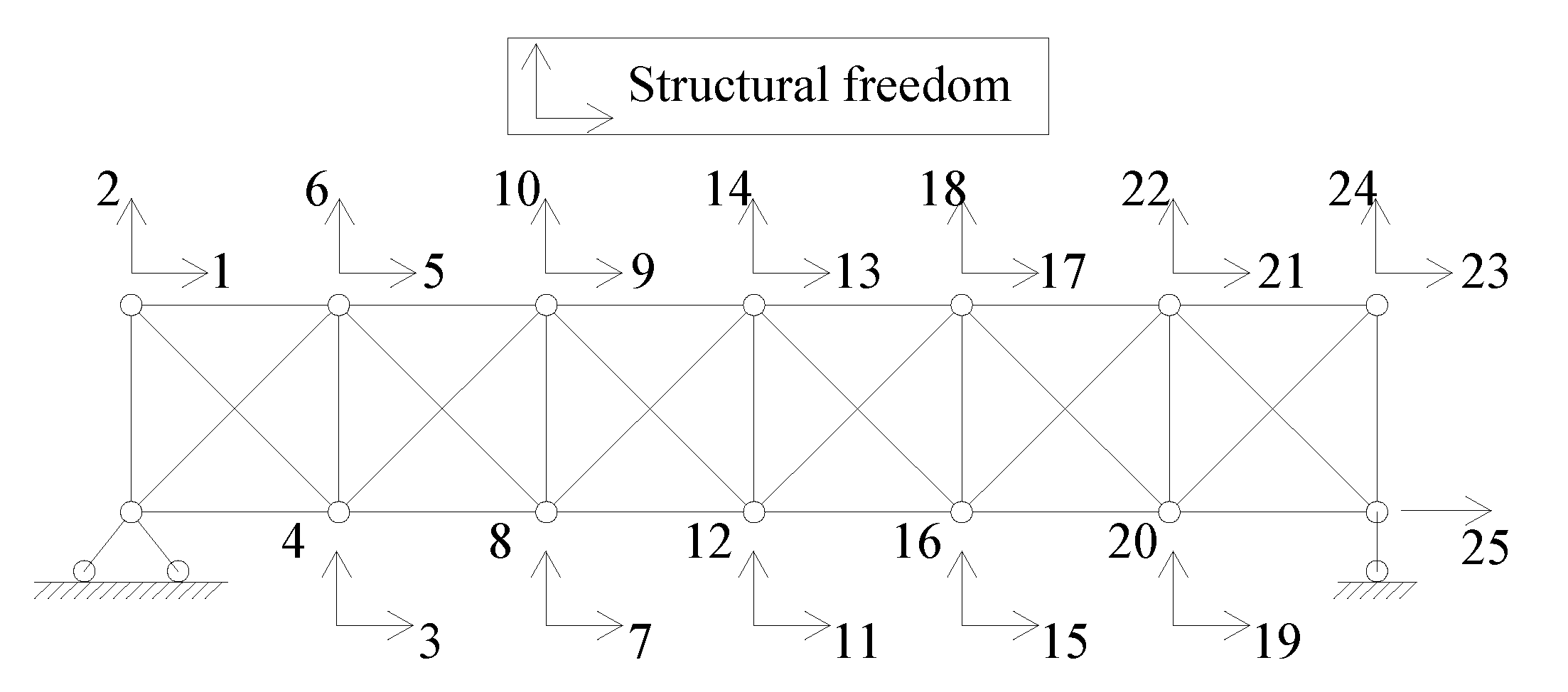
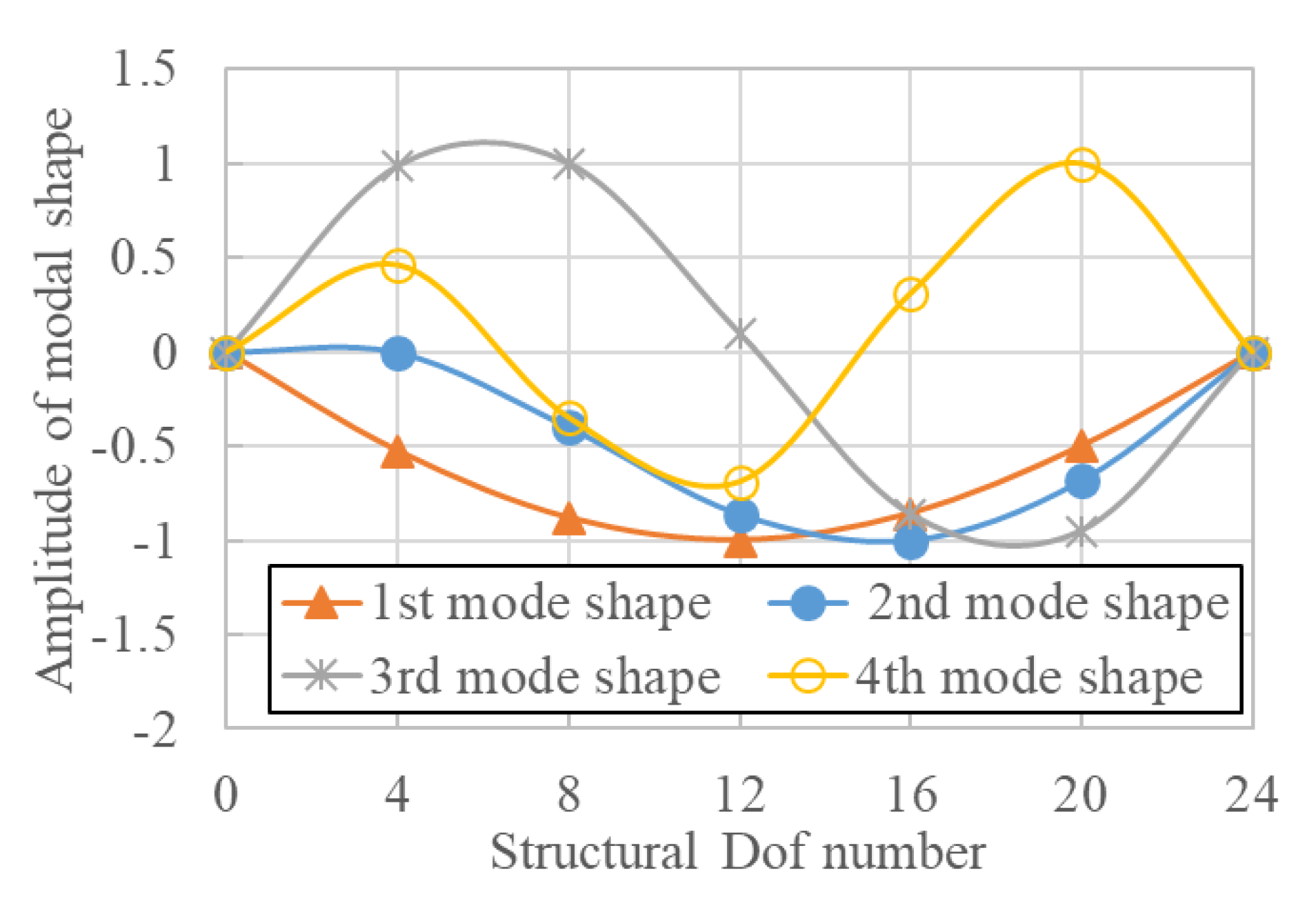
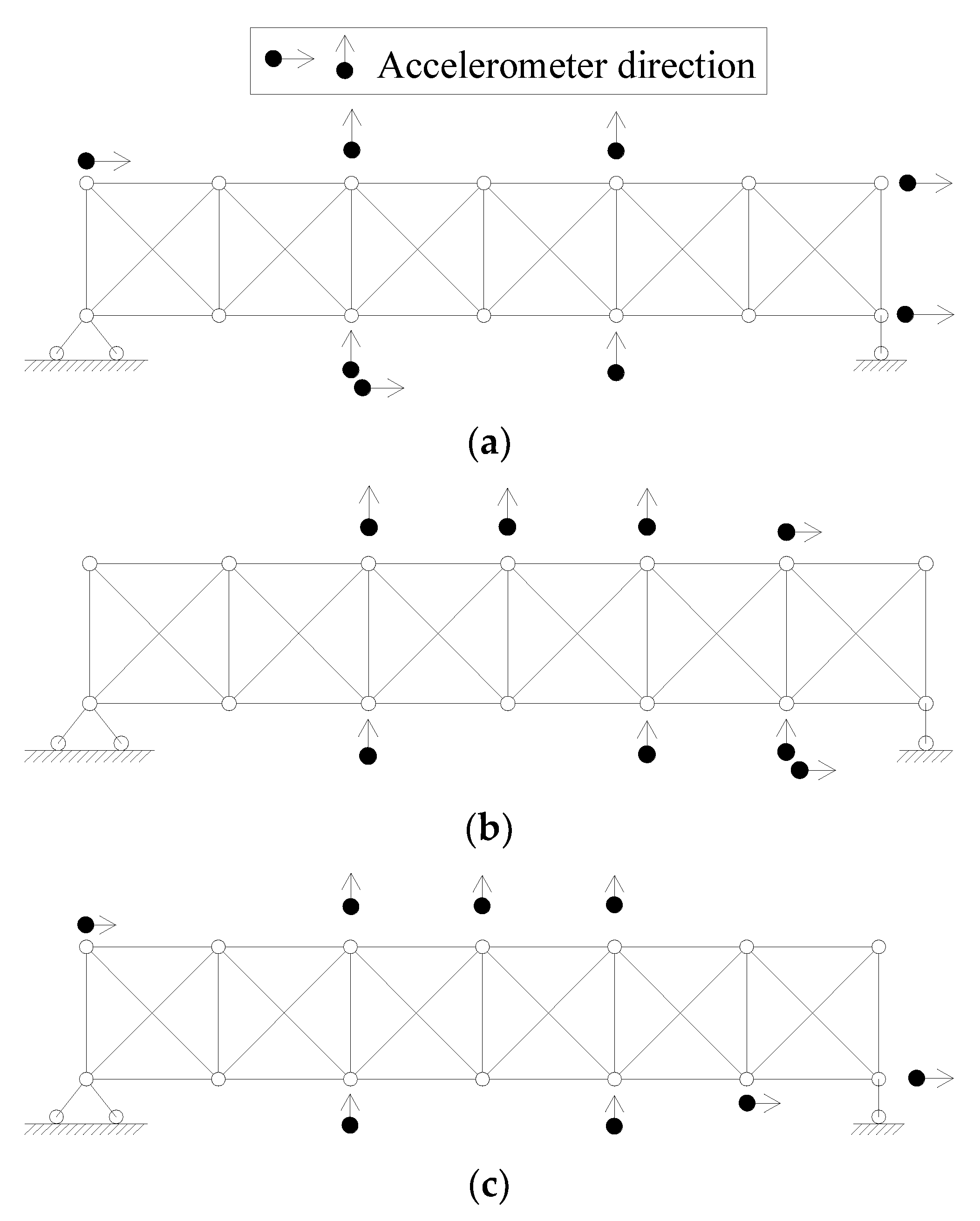
4. Bi-Objective OSP for Plane Truss
4.1. Properties of Plane Truss
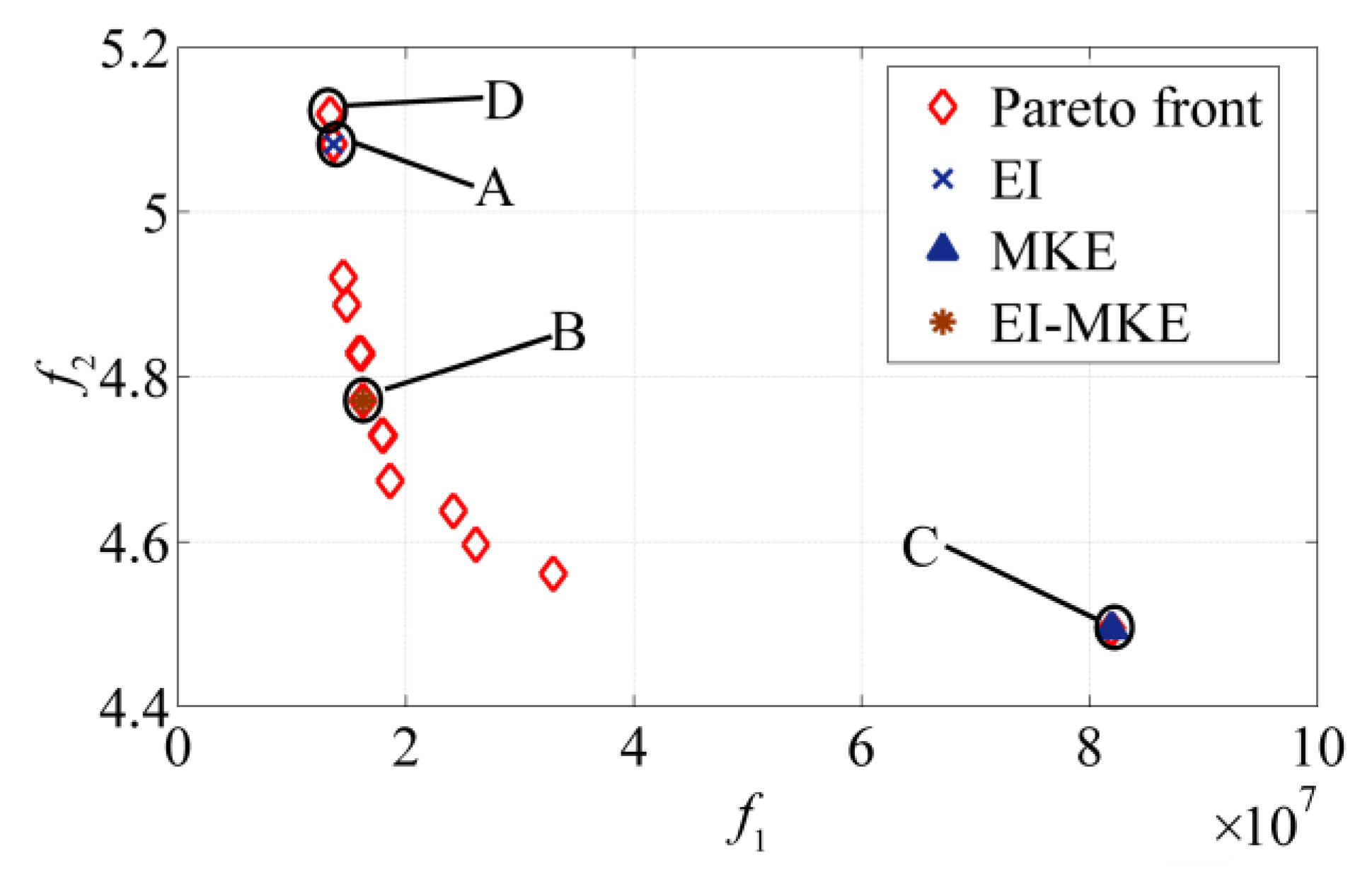
4.2. OSP Proposals
4.3. Comprehensive Evaluation of OSP Schemes
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dharap, P.; Koh, B.-H.; Nagarajaiah, S. Structural Health Monitoring using ARMarkov Observers. J. Intell. Mater. Syst. Struct. 2006, 17, 469–481. [Google Scholar] [CrossRef]
- Sun, L.; Shang, Z.; Xia, Y.; Bhowmick, S.; Nagarajaiah, S. Review of Bridge Structural Health Monitoring Aided by Big Data and Artificial Intelligence: From Condition Assessment to Damage Detection. J. Struct. Eng. 2020, 146, 04020073. [Google Scholar] [CrossRef]
- Yang, D.-H.; Yi, T.-H.; Li, H.-N.; Zhang, Y.-F. Correlation-Based Estimation Method for Cable-Stayed Bridge Girder Deflection Variability under Thermal Action. J. Perform. Constr. Facil. 2018, 32, 04018070. [Google Scholar] [CrossRef]
- Yang, D.-H.; Yi, T.-H.; Li, H.-N.; Zhang, Y.-F. Monitoring and analysis of thermal effect on tower displacement in cable-stayed bridge. Measurement 2018, 115, 249–257. [Google Scholar] [CrossRef]
- Kim, S.; Frangopol, D.M. Multi-objective probabilistic optimum monitoring planning considering fatigue damage detection, maintenance, reliability, service life and cost. Struct. Multidiscip. Optim. 2018, 57, 39–54. [Google Scholar] [CrossRef]
- Leyder, C.; Dertimanis, V.; Frangi, A.; Chatzi, E.; Lombaert, G. Optimal sensor placement methods and metrics–comparison and implementation on a timber frame structure. Struct. Infrastruct. Eng. 2018, 14, 997–1010. [Google Scholar] [CrossRef]
- Ding, Z.; Li, J.; Hao, H.; Lu, Z.-R. Structural damage identification with uncertain modelling error and measurement noise by clustering based tree seeds algorithm. Eng. Struct. 2019, 185, 301–314. [Google Scholar] [CrossRef]
- Nagarajaiah, S.; Yang, Y. Modeling and harnessing sparse and low-rank data structure: A new paradigm for structural dynamics, identification, damage detection, and health monitoring. Struct. Control. Heal. Monit. 2017, 24, e1851. [Google Scholar] [CrossRef]
- Krishnamurthy, P.; Khorrami, F. Optimal Sensor Placement for Monitoring of Spatial Networks. IEEE Trans. Autom. Sci. Eng. 2016, 15, 33–44. [Google Scholar] [CrossRef]
- Loutas, T.; Bourikas, A. Strain sensors optimal placement for vibration-based structural health monitoring. The effect of damage on the initially optimal configuration. J. Sound Vib. 2017, 410, 217–230. [Google Scholar] [CrossRef]
- Pei, X.Y.; Yi, T.H.; Li, H.N. A multi-type sensor placement method for the modal estimation of structure. Smart Struct. Syst. 2018, 21, 407–420. [Google Scholar] [CrossRef]
- Pakzad, S.N.; Fenves, G.L. Statistical Analysis of Vibration Modes of a Suspension Bridge Using Spatially Dense Wireless Sensor Network. J. Struct. Eng. 2009, 135, 863–872. [Google Scholar] [CrossRef] [Green Version]
- Shah, P.C.; Udwadia, F.E. A Methodology for Optimal Sensor Locations for Identification of Dynamic Systems. J. Appl. Mech. 1978, 45, 188–196. [Google Scholar] [CrossRef]
- Limongelli, M.P. Optimal location of sensors for reconstruction of seismic responses through spline function interpolation. Earthq. Eng. Struct. Dyn. 2003, 32, 1055–1074. [Google Scholar] [CrossRef]
- Stephan, C. Sensor placement for modal identification. Mech. Syst. Signal Process. 2012, 27, 461–470. [Google Scholar] [CrossRef]
- Kammer, D.C. Sensor placement for on-orbit modal identification and correlation of large space structures. J. Guid. Control Dyn. 1991, 14, 251–259. [Google Scholar] [CrossRef]
- Papadopoulos, M.; Garcia, E. Sensor Placement Methodologies for Dynamic Testing. AIAA J. 1998, 36, 256–263. [Google Scholar] [CrossRef]
- Carne, T.G.; Dohrmann, C.R.; Soc, E.M. A modal test design strategy for model correlation. In Proceedings of the 13th International Modal Analysis Conference, Albuquerque, NM, USA, 13–16 February 1995; Volume 2460, pp. 927–933. [Google Scholar]
- Li, D.; Li, H.; Fritzen, C. The connection between effective independence and modal kinetic energy methods for sensor placement. J. Sound Vib. 2007, 305, 945–955. [Google Scholar] [CrossRef]
- Yi, T.-H.; Li, H.-N.; Song, G.; Zhang, X.-D. Optimal sensor placement for health monitoring of high-rise structure using adaptive monkey algorithm. Struct. Control. Heal. Monit. 2015, 22, 667–681. [Google Scholar] [CrossRef]
- Yi, T.-H.; Li, H.-N.; Zhang, X.-D. A modified monkey algorithm for optimal sensor placement in structural health monitoring. Smart Mater. Struct. 2012, 21, 21. [Google Scholar] [CrossRef]
- Thiene, M.; Khodaei, Z.S.; Aliabadi, M.H. Optimal sensor placement for maximum area coverage (MAC) for damage localization in composite structures. Smart Mater. Struct. 2016, 25, 095037. [Google Scholar] [CrossRef]
- Salmanpour, M.S.; Sharif Khodaei, Z.; Aliabadi, M.H. Transducer placement optimisation scheme for a delay and sum damage detection algorithm. Struct. Control. Health Monit. 2017, 24, e1898. [Google Scholar] [CrossRef] [Green Version]
- Casciati, S.; Faravelli, L.; Chen, Z. Energy harvesting and power management of wireless sensors for structural control applications in civil engineering. Smart Struct. Syst. 2012, 10, 299–312. [Google Scholar] [CrossRef]
- Sankary, N.; Ostfeld, A. Multiobjective Optimization of Inline Mobile and Fixed Wireless Sensor Networks under Conditions of Demand Uncertainty. J. Water Resour. Plan. Manag. 2018, 144, 04018043. [Google Scholar] [CrossRef]
- Soman, R.N.; Onoufriou, T.; Kyriakides, M.A.; Votsis, R.A.; Chrysostomou, C.Z. Multi-type, multi-sensor placement opti-mization for structural health monitoring of long span bridges. Smart Struct. Syst. 2014, 14, 55–70. [Google Scholar] [CrossRef]
- Azarbayejani, M.; El-Osery, A.; Taha, M.M.R. Entropy-based optimal sensor networks for structural health monitoring of a cable-stayed bridge. Smart Struct. Syst. 2009, 5, 369–379. [Google Scholar] [CrossRef]
- Cha, Y.; Raich, A.; Barroso, L.; Agrawal, A. Optimal placement of active control devices and sensors in frame structures using multi-objective genetic algorithms. Struct. Control. Heal. Monit. 2011, 20, 16–44. [Google Scholar] [CrossRef]
- Ostachowicz, W.; Soman, R.; Malinowski, P. Optimization of sensor placement for structural health monitoring: A review. Struct. Health Monit. 2019, 18, 963–988. [Google Scholar] [CrossRef]
- Ahlawat, A.S.; Ramaswamy, A. Multiobjective Optimal Structural Vibration Control Using Fuzzy Logic Control System. J. Struct. Eng. 2001, 127, 1330–1337. [Google Scholar] [CrossRef]
- Marsh, P.S.; Frangopol, D.M. Lifetime Multiobjective Optimization of Cost and Spacing of Corrosion Rate Sensors Embedded in a Deteriorating Reinforced Concrete Bridge Deck. J. Struct. Eng. 2007, 133, 777–787. [Google Scholar] [CrossRef]
- Huang, Y.; Ludwig, S.A.; Deng, F. Sensor optimization using a genetic algorithm for structural health monitoring in harsh environments. J. Civ. Struct. Heal. Monit. 2016, 6, 509–519. [Google Scholar] [CrossRef]
- Tan, P.; Dyke, S.J.; Richardson, A.; Abdullah, M. Integrated Device Placement and Control Design in Civil Structures Using Genetic Algorithms. J. Struct. Eng. 2005, 131, 1489–1496. [Google Scholar] [CrossRef]
- Beygzadeh, S.; Salajegheh, E.; Torkzadeh, P.; Salajegheh, J.; Naseralavi, S.S. An Improved Genetic Algorithm for Optimal Sensor Placement in Space Structures Damage Detection. Int. J. Space Struct. 2014, 29, 121–136. [Google Scholar] [CrossRef]
- Rao, A.R.M.; Anandakumar, G. Optimal placement of sensors for structural system identification and health monitoring using a hybrid swarm intelligence technique. Smart Mater. Struct. 2007, 16, 2658–2672. [Google Scholar] [CrossRef]
- Srinivas, N.; Deb, K. Multiobjective optimization using non-dominated sorting in genetic algorithms. Evol. Comput. 1994, 2, 221–248. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position Number | Binary Code | With/Without Sensor |
|---|---|---|
| 1 | 1 | With |
| 2 | 0 | Without |
| … | … | … |
| n − 1 | 0 | Without |
| n | 1 | With |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nong, S.-X.; Yang, D.-H.; Yi, T.-H. Pareto-Based Bi-Objective Optimization Method of Sensor Placement in Structural Health Monitoring. Buildings 2021, 11, 549. https://doi.org/10.3390/buildings11110549
Nong S-X, Yang D-H, Yi T-H. Pareto-Based Bi-Objective Optimization Method of Sensor Placement in Structural Health Monitoring. Buildings. 2021; 11(11):549. https://doi.org/10.3390/buildings11110549
Chicago/Turabian StyleNong, Shao-Xiao, Dong-Hui Yang, and Ting-Hua Yi. 2021. "Pareto-Based Bi-Objective Optimization Method of Sensor Placement in Structural Health Monitoring" Buildings 11, no. 11: 549. https://doi.org/10.3390/buildings11110549