Radar Detection-Based Modeling in a Blast Furnace: A Prediction Model of Burden Surface Descent Speed


Abstract
:1. Introduction
2. Measurement Results
2.1. Instrument Settings
2.2. Detection Results
- The BSRDs are nonuniform.
- There are similarities between the shapes of the time-adjacent BSRD samples.
3. Model Description
3.1. Kinematic Modeling Mechanism
3.2. Prediction Model
3.2.1. Approximation of Burden Vertical Descent Speed Field
3.2.2. Prediction of BSRD
- Use and to predict the future discrete BSRP, denoted as .
- Use and to calculate the future discrete BSRD, .
4. Solution of Model Parameters
4.1. Identification of EBDF Parameters
4.2. Selection of Complexity Parameter
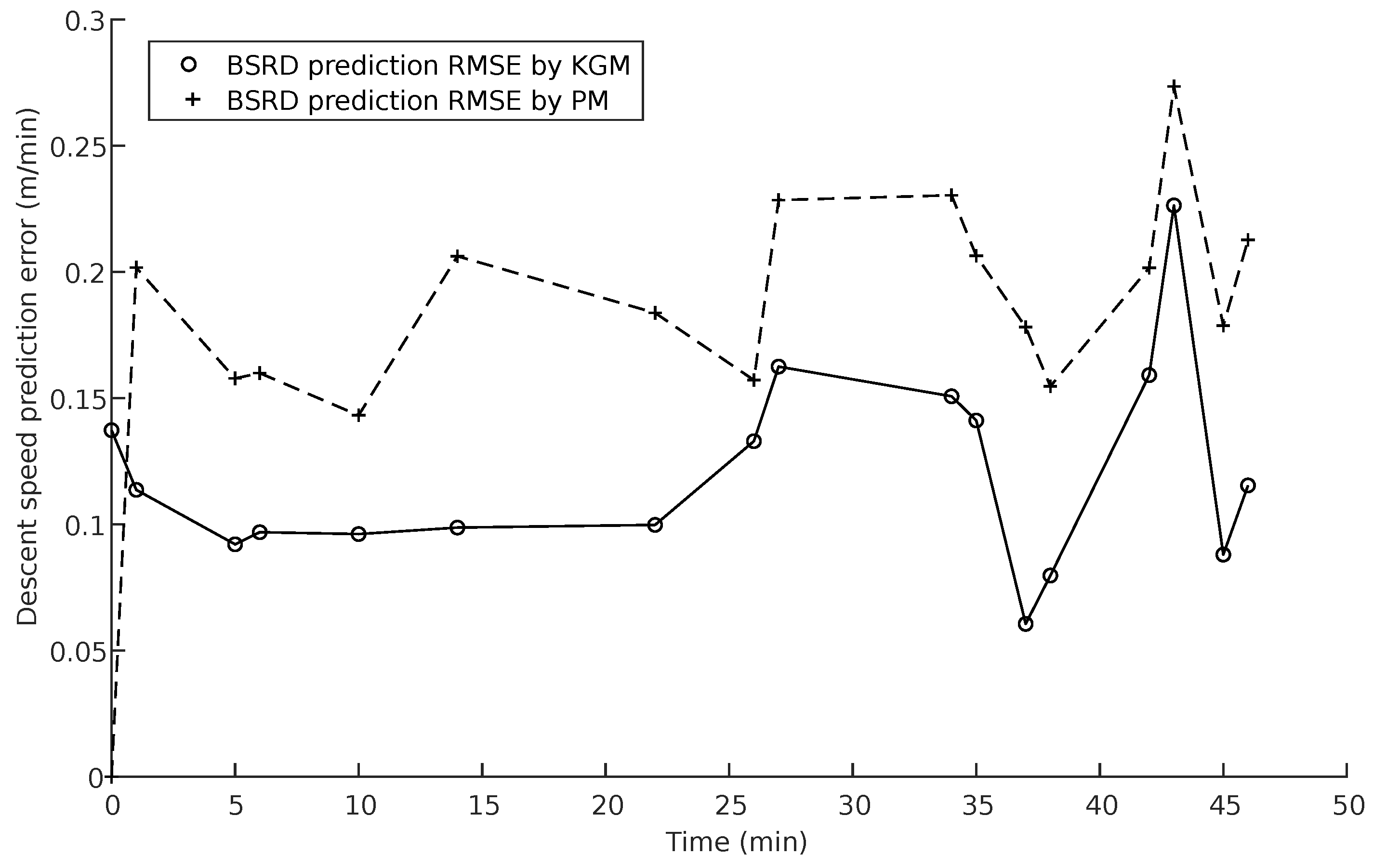
5. Model Performance
5.1. Prediction Accuracy
5.2. Prediction Performance Decay
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| B | Kinematic constant |
| C | Unit-impulse function |
| D | Two-dimensional rectangular region |
| Solution domain of EBDF | |
| d | Diameter parameter of C, m |
| f | Function of burden height, m |
| BSRP before burden descent referring to , m | |
| BSRP after burden descent referring to , m | |
| BSRP before burden descent referring to , m | |
| H | Depth of D, m |
| Vertical distance between and the MSR, m | |
| h | Variable of height, m |
| Vertical distance between and , m | |
| Vertical distance between and before burden descent, m | |
| Vertical distance between and after burden descent, m | |
| m | Number of equivalent consumption sources |
| n | Number of radial detection positions |
| Q | Volumetric flow rate, |
| Parameter of strength of consumption of | |
| R | Burden radius, width of D, m |
| r | Variable of radial position, m |
| Radial position parameter of , m | |
| Coordinates of detection positions | |
| Initial time of prediction, min | |
| Prediction time, min | |
| u | Burden descent speed, m/min |
| Detected BSRD, m/min | |
| Predicted BSRD, m/min | |
| Two calculated BSRDs from a data segment, m/min | |
| V | Burden velocity vector, m/min |
| v | Horizontal speed of burden movement, m/min |
| Gaussian function | |
| Function of equivalent consumption sources | |
| Shape parameter of | |
| Shape parameter of | |
| Two weight of coefficients in optimization |
Abbreviations
| BF | Blast furnace |
| MSR | Mechanical swing radar |
| BSRP | Burden surface radial profile |
| BSRD | Descent speed distribution along the burden surface radius |
| EBDF | Equivalent radial burden descent speed field |
| RMSE | Root-mean-square error |
| MAE | Maximum absolute error |
| PFM | Potential flow model |
| KM | Kinematic model |
| VFM | Viscous flow model |
| KGM | Kinematic Gaussian model |
| PM | Plain data-driven descriptive model |
Appendix A. A Proof of Proposition 1
References
- Geerdes, M.; Chaigneau, R.; Kurunov, I.; Lingiardi, O.; Ricketts, J. Modern Blast Furnace Ironmaking an Introduction, 3rd ed.; IOS Press: Amsterdam, The Netherlands, 2015. [Google Scholar]
- Yang, Y.; Yin, Y.; Wunsch, D.; Zhang, S.; Chen, X.; Li, X.; Cheng, S.; Wu, M.; Liu, K.Z. Development of Blast Furnace Burden Distribution Process Modeling and Control. ISIJ Int. 2017, 57, 1350–1363. [Google Scholar] [CrossRef] [Green Version]
- Tian, J.; Tanaka, A.; Hou, Q.; Chen, X. Radar Detection-Based Modeling in a Blast Furnace: A Prediction Model of Burden Surface Shape After Charging. ISIJ Int. 2018, 58, 1999–2008. [Google Scholar] [CrossRef]
- Ichida, M.; Takao, M.; Kunitomo, K.; Matsuzaki, S.; Deno, T.; Nishihara, K. Radial Distribution of Burden Descent Velocity Near Burden Surface in Blast Furnace. ISIJ Int. 1996, 36, 493–502. [Google Scholar] [CrossRef]
- Zhou, P.; Shi, P.Y.; Song, Y.P.; Tang, K.L.; Fu, D.; Zhou, C.Q. Evaluation of Burden Descent Model for Burden Distribution in Blast Furnace. J. Iron Steel Res. Int. 2016, 23, 765–771. [Google Scholar] [CrossRef]
- Zhang, S.J.; Yu, A.B.; Zulli, P.; Wright, B.; Tuzun, U. Modelling of the Solids Flow in a Blast Furnace. ISIJ Int. 1998, 38, 1311–1319. [Google Scholar] [CrossRef]
- Zhang, S.; Yu, A.; Zulli, P.; Wright, B.; Austin, P. Numerical Simulation of Solids Flow in a Blast Furnace. Appl. Math. Model. 2002, 26, 141–154. [Google Scholar] [CrossRef]
- Natsui, S.; Ueda, S.; Fan, Z.; Andersson, N.; Kano, J.; Inoue, R.; Ariyama, T. Characteristics of Solid Flow and Stress Distribution Including Asymmetric Phenomena in Blast Furnace Analyzed By Discrete Element Method. ISIJ Int. 2010, 50, 207–214. [Google Scholar] [CrossRef]
- Fu, D.; Chen, Y.; Zhou, C.Q. Mathematical Modeling of Blast Furnace Burden Distribution With Non-Uniform Descending Speed. Appl. Math. Model. 2015, 39, 7554–7567. [Google Scholar] [CrossRef]
- Yang, K.; Choi, S.; Chung, J.; Yagi, J.I. Numerical Modeling of Reaction and Flow Characteristics in a Blast Furnace With Consideration of Layered Burden. ISIJ Int. 2010, 50, 972–980. [Google Scholar] [CrossRef]
- Takatani, K.; Inada, T.; Ujisawa, Y. Three-Dimensional Dynamic Simulator for Blast Furnace. ISIJ Int. 1999, 39, 15–22. [Google Scholar] [CrossRef]
- Nedderman, R.; Tuzun, U. A Kinematic Model for the Flow of Granular Materials. Powder Technol. 1979, 22, 243–253. [Google Scholar] [CrossRef]
- Chen, J.; Akiyama, T.; Nogami, H.; Yagi, J.I.; Takahashi, H. Modeling of Solid Flow in Moving Beds. ISIJ Int. 1993, 33, 664–671. [Google Scholar] [CrossRef]
- Wu, J.; Chen, J.; Yang, Y. A Modified Kinematic Model for Particle Flow in Moving Beds. Powder Technol. 2008, 181, 74–82. [Google Scholar] [CrossRef]
- Chen, X.; Wei, J.; Xu, D.; Hou, Q.; Bai, Z. 3-dimension Imaging System of Burden Surface With 6-radars Array in a Blast Furnace. ISIJ Int. 2012, 52, 2048–2054. [Google Scholar] [CrossRef]
- Wei, J.; Chen, X.; Wang, Z.; Kelly, J.; Zhou, P. 3-dimension Burden Surface Imaging System With T-Shaped Mimo Radar in the Blast Furnace. ISIJ Int. 2015, 55, 592–599. [Google Scholar] [CrossRef]
- Wei, J.; Ma, J.; Wan, L.; Jia, G.; Chen, X. Measuring System of Radial Burden Surface With Mechanical Swing Radar in a Blast Furnace. Iron Steel 2015, 50, 94–100. [Google Scholar]
- Mullins, W.W. Stochastic Theory of Particle Flow Under Gravity. J. Appl. Phys. 1972, 43, 665–678. [Google Scholar] [CrossRef]
- Tuzun, U.; Houlsby, G.; Nedderman, R.; Savage, S. The Flow of Granular Materials—II Velocity Distributions in Slow Flow. Chem. Eng. Sci. 1982, 37, 1691–1709. [Google Scholar] [CrossRef]
- Cannon, J.R. The One-Dimensional Heat Equation; Number 23 in Encyclopedia of Mathematics and Its Applications; Cambridge University Press: Cambridge, UK, 1984. [Google Scholar]
- Hsieh, P.F.; Sibuya, Y. Basic Theory of Ordinary Differential Equations; Universitext, Springer: New York, NY, USA, 1999. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case Source No. | 1 | 2 | ||||||
|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 1 | 2 | 3 | 4 | |
| 0.0005 | 0.0005 | 0.0005 | 0.0005 | 0.0005 | 0.0005 | 0.0005 | 0.0005 | |
| 0.1433 | 1.6208 | 3.0873 | 3.0889 | 1.6149 | 1.1880 | 1.1928 | 3.5890 | |
| 0.1563 | 0.1328 | 0.0757 | 0.0764 | 0.1081 | 0.0186 | 0.0613 | 0.1270 | |
| B | 0.0403 | 0.0413 | ||||||
| Case | Model | BSRP | BSRD | ||
|---|---|---|---|---|---|
| MAE | RMSE | MAE | RMSE | ||
| 1 | KGM | 0.2537 | 0.1081 | 0.0561 | 0.0353 |
| PM | 0.5959 | 0.2970 | 0.1429 | 0.0732 | |
| 2 | KGM | 0.5801 | 0.2913 | 0.1633 | 0.0987 |
| PM | 0.8601 | 0.5823 | 0.2280 | 0.1325 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, J.; Tanaka, A.; Hou, Q.; Chen, X. Radar Detection-Based Modeling in a Blast Furnace: A Prediction Model of Burden Surface Descent Speed. Metals 2019, 9, 609. https://doi.org/10.3390/met9050609
Tian J, Tanaka A, Hou Q, Chen X. Radar Detection-Based Modeling in a Blast Furnace: A Prediction Model of Burden Surface Descent Speed. Metals. 2019; 9(5):609. https://doi.org/10.3390/met9050609
Chicago/Turabian StyleTian, Jiuzhou, Akira Tanaka, Qingwen Hou, and Xianzhong Chen. 2019. "Radar Detection-Based Modeling in a Blast Furnace: A Prediction Model of Burden Surface Descent Speed" Metals 9, no. 5: 609. https://doi.org/10.3390/met9050609