
Intelligent Fault Diagnosis Method for Blade Damage of Quad-Rotor UAV Based on Stacked Pruning Sparse Denoising Autoencoder and Convolutional Neural Network


Abstract
:1. Introduction
- We use a new and improved convolutional neural network method, which can be directly applied to the original UAV data collected in practice. Compared with the traditional method, it does not require separate data preprocessing. The comparison is shown in Figure 1;
- The method uses a stack denoising autoencoder as the first layer of the convolutional neural network, which is very robust against data with much noise in the data, and still has a relatively high fault diagnosis accuracy rate under high noise conditions;
- Directly convert the sensor data collected by the drone into a gray sampling map. Expanding the dimensionality of the sample can further improve the feature extraction ability of the DL model;
- This method is aimed at the problem that enough data cannot be collected during neural network training. We use a one-dimensional sliding window for overlapping sampling to enhance the data, increase the data scale, and improve the generalization of the neural network ability;
- We use the feature maps learned by visualizing sPSDAE-CNN to explore the actual feature learning and classification mechanism of the sPSDAE-CNN model. At the same time, the pruning operation is introduced to speed up the training of SDAE.
2. Introduction to the Convolutional Neural Network and Stack Denoising Autoencoder
2.1. A Brief Introduction to Convolutional Neural Networks
2.1.1. Convolutional Layer
2.1.2. Activation Layer
2.1.3. Pooling Layer
2.1.4. Batch Normalization
2.2. Stacked Denoising Autoencoder
3. Proposed Convolutional Neural Network with Stacked Pruning Sparse Denoising Autoencoder
3.1. Proposed sPSDAE-CNN Model Structure
3.2. Construction of Sparse Noise Reduction Autoencoding Network
3.3. The Influence of Various Parts of the Model on the Results
3.3.1. The Effect of Sparse Pruning and Noise Reduction Autoencoder on the Results
3.3.2. The Effect of Convolutional Neural Networks on Results
3.4. Data Augmentation
4. Validation of the sPSDAE-CNN Model
4.1. Data Description
4.2. Experimental Settings
4.2.1. Parameters of the Proposed Network
4.2.2. Hyperparameter Optimization of the Proposed Network
4.2.3. The Effect of the Number of Training Data on the Results
4.2.4. Training Speed of sPSDAE-CNN
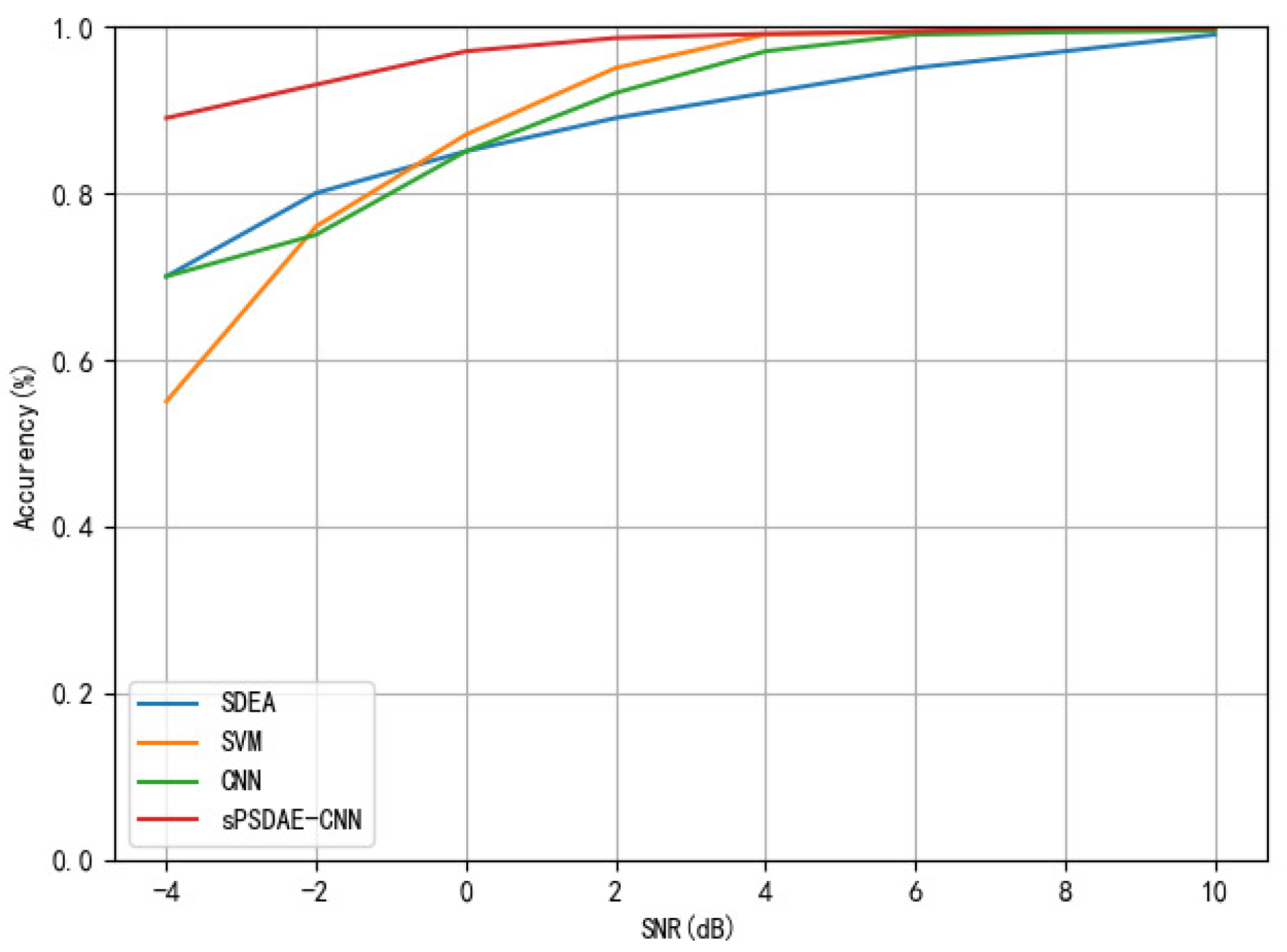
4.2.5. Performance under Different Noise Interferences
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bateman, F.; Noura, H.; Ouladsine, M. Fault diagnosis and fault-tolerant control strategy for the aerosonde UAV. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2119–2137. [Google Scholar] [CrossRef]
- Yu, X.; Jiang, J. A survey of fault-tolerant controllers based on safety-related issues. Annu. Rev. Control 2015, 39, 46–57. [Google Scholar] [CrossRef]
- Haupt, F.; Berding, G.; Namazian, A.; Wilke, F.; Böker, A.; Merseburger, A.; Geworski, L.; Kuczyk, M.A.; Bengel, F.M.; Peters, I. Expert system for bone scan interpretation improves progression assessment in bone metastatic prostate cancer. Adv. Ther. 2015, 34, 986–994. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y.; Geng, L. Research on SDG fault diagnosis of ocean shipping boiler system based on fuzzy granular computing under data fusion. Pol. Marit. Res. 2018, 25, 92–97. [Google Scholar] [CrossRef] [Green Version]
- Hu, G.; Phan, H.; Ouache, R.; Gandhi, H.; Hewage, K.; Sadiq, R. Fuzzy fault tree analysis of hydraulic fracturing flowback water storage failure. J. Nat. Gas Sci. Eng. 2019, 72, 103039. [Google Scholar] [CrossRef]
- Liu, D.; Gu, X.; Li, H. A complete analytic model for fault diagnosis of power systems. Proc. Chin. Soc. Electr. Eng. 2011, 31, 85–92. [Google Scholar]
- Chen, X.; Qi, X.; Wang, Z.; Cui, C.; Wu, B.; Yang, Y. Fault diagnosis of rolling bearing using marine predators algorithm-based support vector machine and topology learning and out-of-sample embedding. Measurement 2021, 176, 109116. [Google Scholar] [CrossRef]
- Chen, F.; Wyer, R.S., Jr. The effects of affect, processing goals and temporal distance on information processing: Qualifications on temporal construal theory. J. Consum. Psychol. 2015, 25, 326–332. [Google Scholar] [CrossRef]
- Xiao, Y.; Li, C.; Song, L.; Yang, J.; Su, J. A multidimensional information fusion-based matching decision method for manufacturing service resource. IEEE Access 2021, 9, 39839–39851. [Google Scholar] [CrossRef]
- Chady, T.; Sikora, R.; Misztal, L.; Grochowalska, B.; Grzywacz, B.; Szydłowski, M.; Waszczuk, P.; Szwagiel, M. The application of rough sets theory to design of weld defect classifiers. J. Nondestruct. Eval. 2017, 36, 40. [Google Scholar] [CrossRef] [Green Version]
- Esteki, M.; Farajmand, B.; Kolahderazi, Y.; Simal-Gandara, J. Chromatographic fingerprinting with multivariate data analysis for detection and quantification of apricot kernel in almond powder. Food Anal. Methods 2017, 10, 3312–3320. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhiyao, Z.; Haoxiang, L.; Quan, Q. Fault detection and identification for quadrotor based on airframe vibration signals: A data-driven method. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 6356–6361. [Google Scholar]
- Tang, S.; Yuan, S.; Zhu, Y. Convolutional neural network in intelligent fault diagnosis toward rotatory machinery. IEEE Access 2020, 8, 86510–86519. [Google Scholar] [CrossRef]
- Tao, H.; Wang, P.; Chen, Y.; Stojanovic, V.; Yang, H. An unsupervised fault diagnosis method for rolling bearing using STFT and generative neural networks. J. Frankl. Inst. 2020, 357, 7286–7307. [Google Scholar] [CrossRef]
- Glowacz, A. Fault diagnosis of electric impact drills using thermal imaging. Measurement 2021, 171, 108815. [Google Scholar] [CrossRef]
- Polat, K. The fault diagnosis based on deep long short-term memory model from the vibration signals in the computer numerical control machines. J. Inst. Electron. Comput. 2020, 2, 72–92. [Google Scholar] [CrossRef] [Green Version]
- Xiong, R.; Sun, W.; Yu, Q.; Sun, F. Research progress, challenges and prospects of fault diagnosis on battery system of electric vehicles. Appl. Energy 2020, 2, 72–92. [Google Scholar] [CrossRef]
- Hu, X.; Zhang, K.; Liu, K.; Lin, X.; Dey, S.; Onori, S. Advanced fault diagnosis for lithium-ion battery systems: A review of fault mechanisms, fault features, and diagnosis procedures. IEEE Ind. Electron. Mag. 2020, 14, 65–91. [Google Scholar] [CrossRef]
- Azamfar, M.; Singh, J.; Bravo-Imaz, I.; Lee, J. Multisensor data fusion for gearbox fault diagnosis using 2-D convolutional neural network and motor current signature analysis. Mech. Syst. Signal Process. 2020, 144, 106861. [Google Scholar] [CrossRef]
- He, Z.; Shao, H.; Wang, P.; Lin, J.J.; Cheng, J.; Yang, Y. Deep transfer multi-wavelet auto-encoder for intelligent fault diagnosis of gearbox with few target training samples. Knowl.-Based Syst. 2021, 191, 105313. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B.; Ding, S.X.; Huang, B. Data-driven fault diagnosis for traction systems in high-speed trains: A survey, challenges, and perspectives. IEEE Trans. Intell. Transp. Syst. 2020, 64, 1–3. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B. A review of fault detection and diagnosis for the traction system in high-speed trains. Trans. Intell. Transp. Syst. 2019, 21, 450–465. [Google Scholar] [CrossRef]
- Huang, D.; Li, S.; Qin, N.; Zhang, Y. Fault diagnosis of high-speed train bogie based on the improved-CEEMDAN and 1-D CNN algorithms. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar]
- Iannace, G.; Ciaburro, G.; Trematerra, A. Fault diagnosis for UAV blades using artificial neural network. Robotics 2019, 8, 59. [Google Scholar] [CrossRef] [Green Version]
- Liu, W.; Chen, Z.; Zheng, M. An Audio-Based Fault Diagnosis Method for Quadrotors Using Convolutional Neural Network and Transfer Learning. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; pp. 1367–1372. [Google Scholar]
- Zhang, W.; Peng, G.; Li, C.; Chen, Y.; Zhang, Z. A new deep learning model for fault diagnosis with good anti-noise and domain adaptation ability on raw vibration signals. Sensors 2015, 17, 425. [Google Scholar] [CrossRef] [PubMed]
- Che, C.; Wang, H.; Ni, X.; Fu, Q. Intelligent fault diagnosis method of rolling bearing based on stacked denoising autoencoder and convolutional neural network. Ind. Lubr. Tribol. 2020, 72, 947–953. [Google Scholar] [CrossRef]
- Cheng, Y.; Lin, M.; Wu, J.; Zhu, H.; Shao, X. Intelligent fault diagnosis of rotating machinery based on continuous wavelet transform-local binary convolutional neural network. Knowl.-Based Syst. 2021, 216, 106796. [Google Scholar] [CrossRef]
- Okada, K.F.Á.; de Morais, A.S.; Oliveira-Lopes, L.C.; Ribeiro, L. Neuroadaptive Observer-Based Fault-Diagnosis and Fault-Tolerant Control for Quadrotor UAV. In Proceedings of the 2021 14th IEEE International Conference on Industry Applications, São Paulo, Brazil, 15–18 August 2021; pp. 285–292. [Google Scholar]
- Guo, J.; Qi, J.; Wu, C. Robust fault diagnosis and fault-tolerant control for nonlinear quadrotor unmanned aerial vehicle system with unknown actuator faults. Int. J. Adv. Robot. Syst. 2021, 18, 17298814211002734. [Google Scholar] [CrossRef]
- Patan, M.G.; Caliskan, F. Sensor fault–tolerant control of a quadrotor unmanned aerial vehicle. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2021. [Google Scholar] [CrossRef]
- Wang, B.; Huang, P.; Zhang, W. A Robust Fault-Tolerant Control for Quadrotor Helicopters against Sensor Faults and External Disturbances. Complexity 2021, 2021, 6672812. [Google Scholar] [CrossRef]
- Kalchbrenner, N.; Grefenstette, E.; Blunsom, P. A convolutional neural network for modelling sentences. arXiv 2014, arXiv:1404.2188. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Sibi, P.; Jones, S.A.; Siddarth, P. Analysis of different activation functions using back propagation neural networks. J. Theor. Appl. Inf. Technol. 2013, 47, 1264–1268. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. Int. Conf. Mach. Learn. 2015, 37, 448–456. [Google Scholar]
- Lu, C.; Wang, Z.Y.; Qin, W.L.; Ma, J. Fault diagnosis of rotary machinery components using a stacked denoising autoencoder-based health state identification. Signal Process. 2017, 130, 377–388. [Google Scholar] [CrossRef]
- Heys, J.J.; Holyoak, N.; Calleja, A.M.; Belohlavek, M.; Chaliki, H.P. Revisiting the simplified Bernoulli equation. Open Biomed. Eng. J. 2010, 4, 123. [Google Scholar] [CrossRef]
- Werbos, P.J. Backpropagation through time: What it does and how to do it. Proc. IEEE 1990, 78, 1550–1560. [Google Scholar] [CrossRef] [Green Version]
- Guo, X.; Chen, L.; Shen, C. Hierarchical adaptive deep convolution neural network and its application to bearing fault diagnosis. Measurement 2016, 93, 490–502. [Google Scholar] [CrossRef]
- Kiranyaz, S.; Ince, T.; Abdeljaber, O.; Avci, O.; Gabbouj, M. 1-d convolutional neural networks for signal processing applications. In Proceedings of the ICASSP 2019—2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 8360–8364. [Google Scholar]
- Avci, O.; Abdeljaber, O.; Kiranyaz, S.; Inman, D. Structural damage detection in real time: Implementation of 1D convolutional neural networks for SHM applications. Struct. Health Monit. Damage Detect. 2017, 7, 49–54. [Google Scholar]
- Janssens, O.; Slavkovikj, V.; Vervisch, B.; Stockman, K.; Loccufier, M.; Verstockt, S.; Van de Walle, R.; Van Hoecke, S. Convolutional neural network based fault detection for rotating machinery. J. Sound Vib. 2016, 377, 331–345. [Google Scholar] [CrossRef]
- Tan, Y.; Wang, J. A support vector machine with a hybrid kernel and minimal Vapnik-Chervonenkis dimension. IEEE Trans. Knowl. Data Eng. 2004, 16, 385–395. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types of Damage to the Blades | Damage Degree of the Blade |
|---|---|
| No damage | 0% |
| Broken blade | 5% |
| Broken blade | 10% |
| Broken blade | 15% |
| Broken blade | 20% |
| Blade crack | Slightly deformation |
| Blade crack | General deformation |
| Blade crack | Severely deformation |
| Types of Damage to the Blades | No Damage | Broken Blade | Blade Crack | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Data Set | 0 | 5% | 10% | 15% | 20% | slightly deformation | General deformation | Severely deformation | |
| A | Train | 10,000 | 10,000 | 10,000 | 10,000 | 10,000 | 10,000 | 10,000 | 10,000 |
| Test | 200 | 200 | 200 | 200 | 200 | 200 | 200 | 200 | |
| B | Train | 14,000 | 14,000 | 14,000 | 14,000 | 14,000 | 14,000 | 14,000 | 14,000 |
| Test | 280 | 280 | 280 | 280 | 280 | 280 | 280 | 280 | |
| C | Train | 18,000 | 18,000 | 18,000 | 18,000 | 18,000 | 18,000 | 18,000 | 18,000 |
| Test | 360 | 360 | 360 | 360 | 360 | 360 | 360 | 360 | |
| D | Train | 20,000 | 20,000 | 20,000 | 20,000 | 20,000 | 20,000 | 20,000 | 20,000 |
| Test | 400 | 400 | 400 | 400 | 400 | 400 | 400 | 400 | |
| No | Layer Type | KernelSize Stride | Output Size (Width × Depth) | Padding |
|---|---|---|---|---|
| 1 | Convolution1 | /1 | Yes | |
| 2 | Pooling1 | /1 | No | |
| 3 | Convolution2 | /1 | No | |
| 4 | Pooling2 | /1 | Yes | |
| 5 | Convolution3 | /1 | No | |
| 6 | Pooling3 | /1 | Yes | |
| 7 | Fully-connected | 144 | / | |
| 8 | Softmax | 8 | 8 | / |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, P.; Wen, C.; Geng, H.; Liu, P. Intelligent Fault Diagnosis Method for Blade Damage of Quad-Rotor UAV Based on Stacked Pruning Sparse Denoising Autoencoder and Convolutional Neural Network. Machines 2021, 9, 360. https://doi.org/10.3390/machines9120360
Yang P, Wen C, Geng H, Liu P. Intelligent Fault Diagnosis Method for Blade Damage of Quad-Rotor UAV Based on Stacked Pruning Sparse Denoising Autoencoder and Convolutional Neural Network. Machines. 2021; 9(12):360. https://doi.org/10.3390/machines9120360
Chicago/Turabian StyleYang, Pu, Chenwan Wen, Huilin Geng, and Peng Liu. 2021. "Intelligent Fault Diagnosis Method for Blade Damage of Quad-Rotor UAV Based on Stacked Pruning Sparse Denoising Autoencoder and Convolutional Neural Network" Machines 9, no. 12: 360. https://doi.org/10.3390/machines9120360