A New Stiffness Performance Index: Volumetric Isotropy Index


Abstract
:1. Introduction
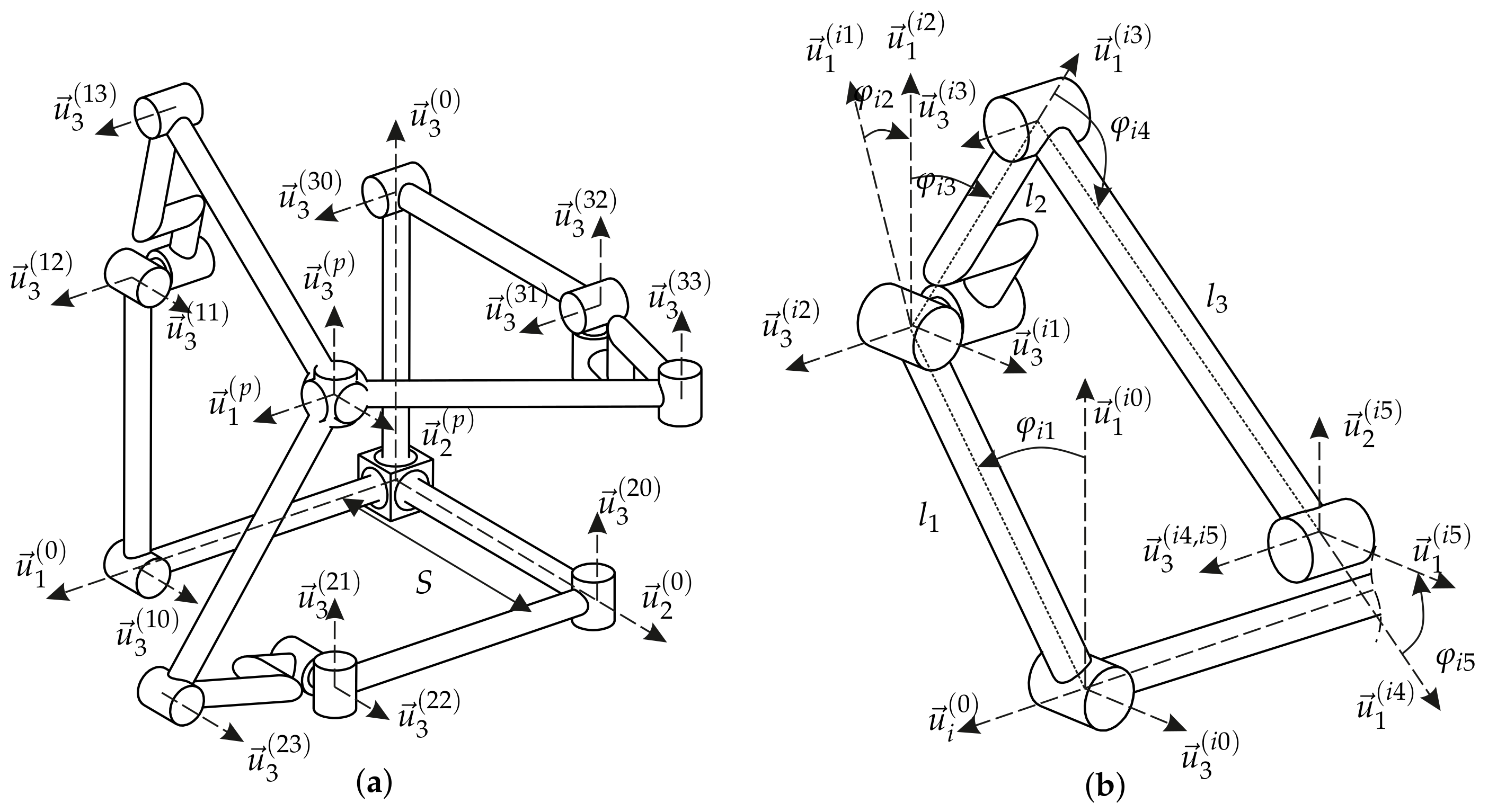
2. Stiffness Model of R-CUBE
3. Stiffness Performance Indices
3.1. Performance Indices in the Literature
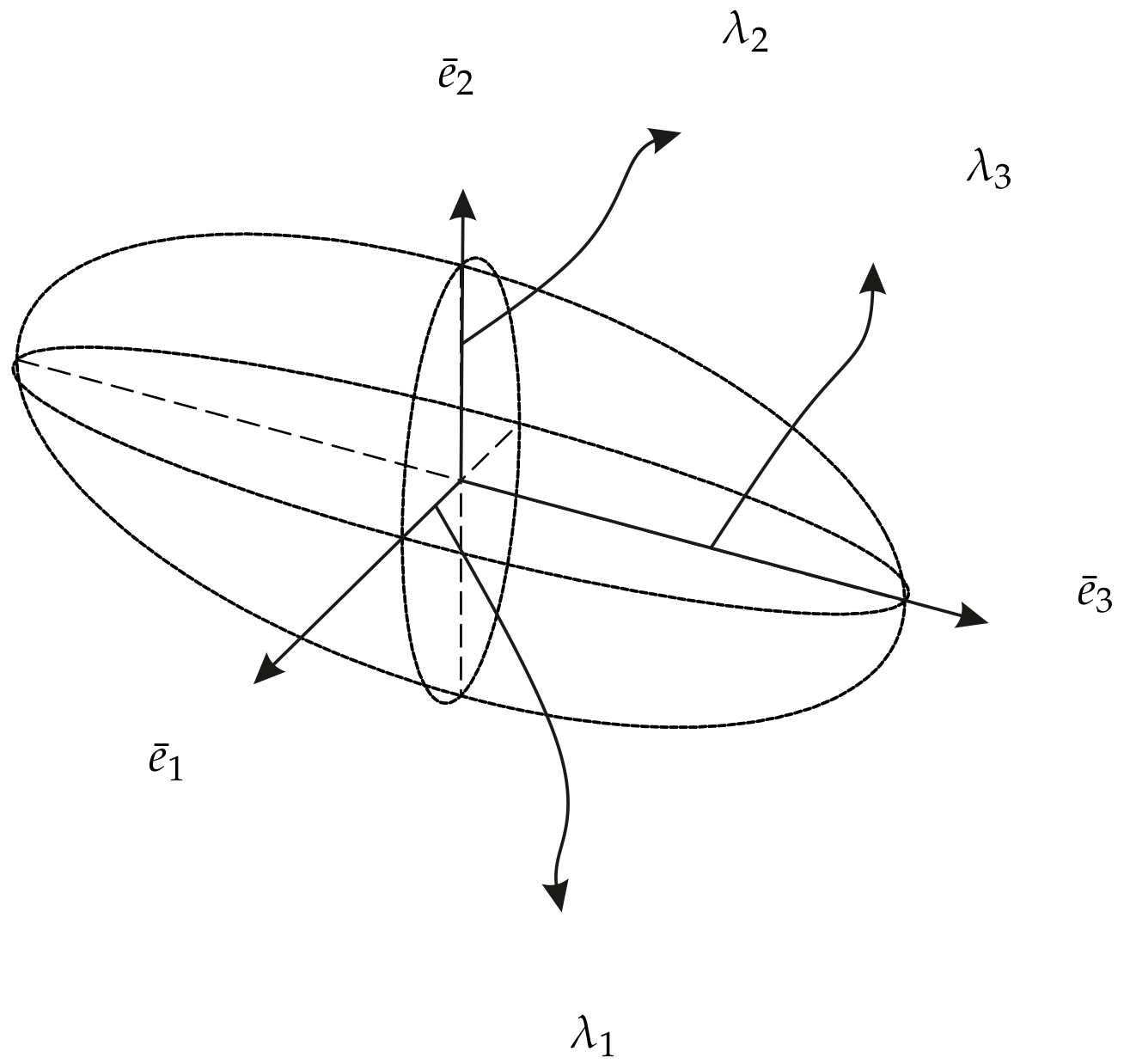
3.2. Proposed Performance Index
3.3. Construction of Performance Indices for R-CUBE
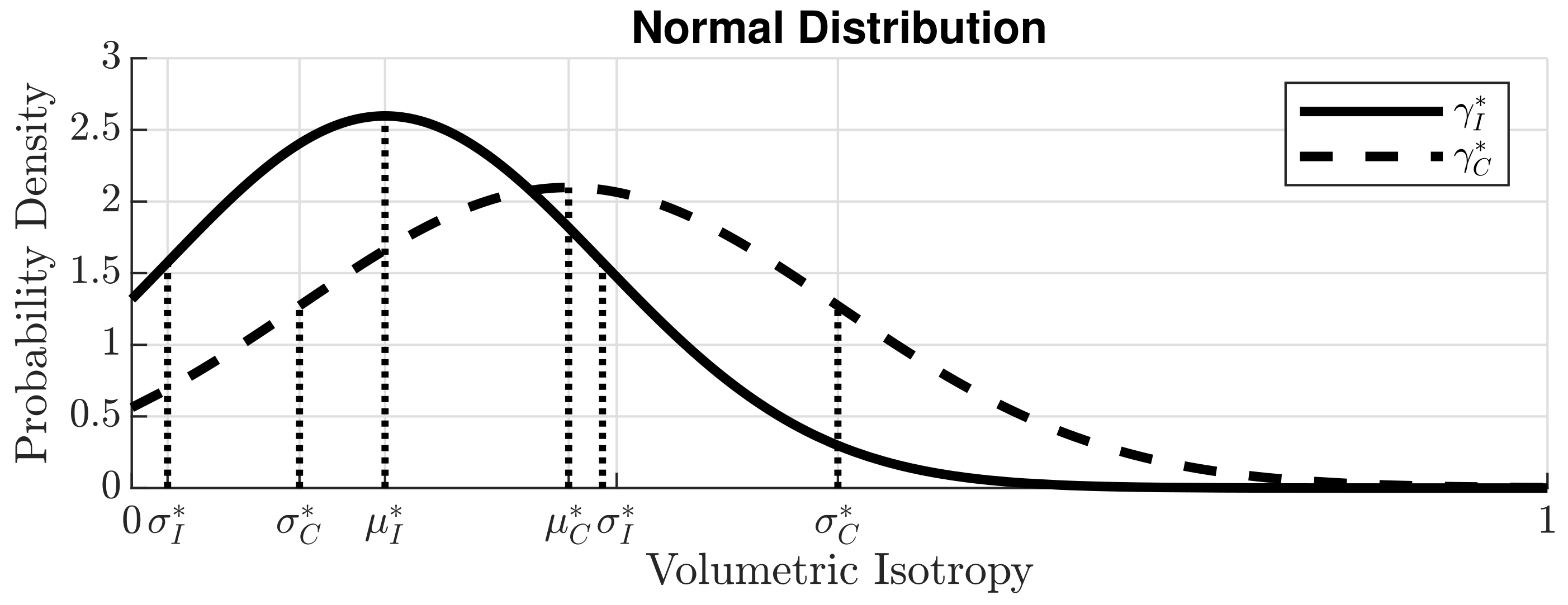
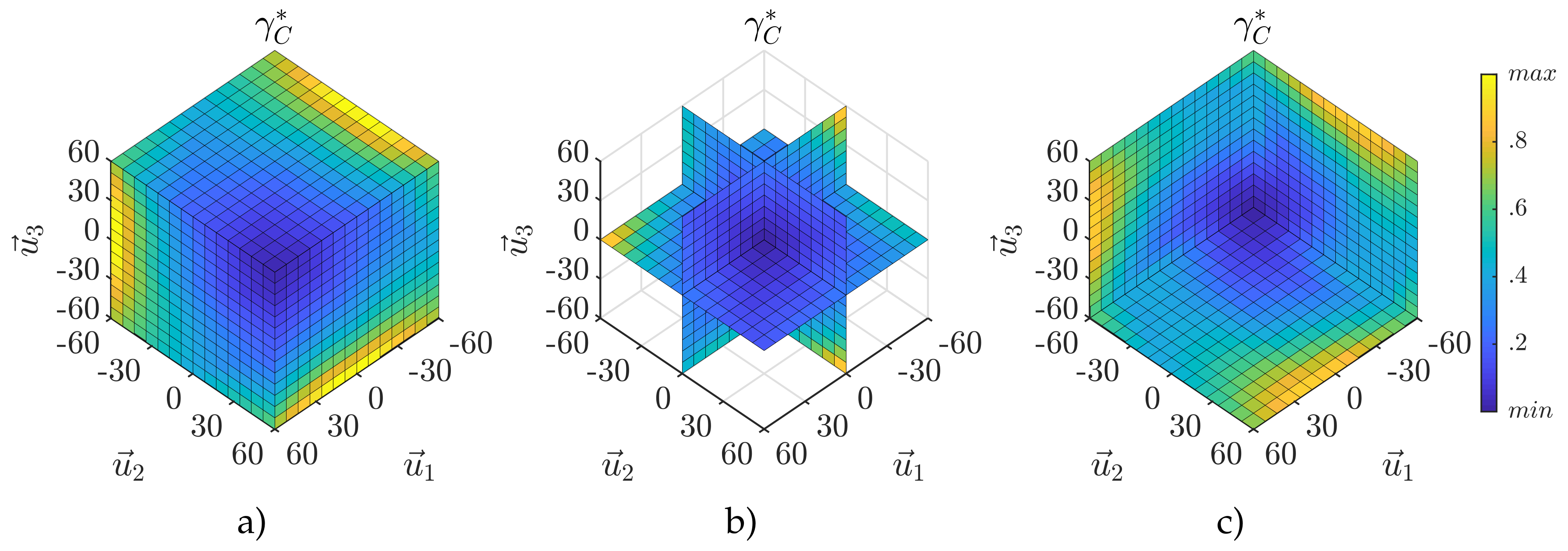
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lian, B.; Sun, T.; Song, Y.; Jin, Y.; Price, M. Stiffness analysis and experiment of a novel 5-DoF parallel kinematic machine considering gravitational effects. Int. J. Mach. Tools Manuf. 2015, 95, 82–96. [Google Scholar] [CrossRef] [Green Version]
- Dong, C.; Liu, H.; Yue, W.; Huang, T. Stiffness modeling and analysis of a novel 5-DOF hybrid robot. Mech. Mach. Theory 2018, 125, 80–93. [Google Scholar] [CrossRef] [Green Version]
- Guo, Y.; Dong, H.; Ke, Y. Stiffness-oriented posture optimization in robotic machining applications. Robot. Comput.-Integr. Manuf. 2015, 35, 69–76. [Google Scholar] [CrossRef]
- Klimchik, A.; Pashkevich, A. Serial vs. quasi-serial manipulators: Comparison analysis of elasto-static behaviors. Mech. Mach. Theory 2017, 107, 46–70. [Google Scholar] [CrossRef]
- Sun, T.; Lian, B. Stiffness and mass optimization of parallel kinematic machine. Mech. Mach. Theory 2018, 120, 73–88. [Google Scholar] [CrossRef]
- Courteille, E.; Deblaise, D.; Maurine, P. Design optimization of a delta-like parallel robot through global stiffness performance evaluation. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 11–15 October 2009; pp. 5159–5166. [Google Scholar]
- Wang, H.; Zhang, L.; Chen, G.; Huang, S. Parameter optimization of heavy-load parallel manipulator by introducing stiffness distribution evaluation index. Mech. Mach. Theory 2017, 108, 244–259. [Google Scholar] [CrossRef] [Green Version]
- Taghvaeipour, A.; Angeles, J.; Lessard, L. On the elastostatic analysis of mechanical systems. Mech. Mach. Theory 2012, 58, 202–216. [Google Scholar] [CrossRef]
- Arsenault, M. Workspace and stiffness analysis of a three-degree-of-freedom spatial cable-suspended parallel mechanism while considering cable mass. Mech. Mach. Theory 2013, 66, 1–13. [Google Scholar] [CrossRef]
- Gosselin, C.M. Dexterity indices for planar and spatial robotic manipulators. In Proceedings of the IEEE International Conference on Robotics and Automation, Cincinnati, OH, USA, 13–18 May 1990; pp. 650–655. [Google Scholar]
- Yan, S.; Ong, S.; Nee, A. Stiffness analysis of parallelogram-type parallel manipulators using a strain energy method. Robot. Comput.-Integr. Manuf. 2016, 37, 13–22. [Google Scholar] [CrossRef]
- Raoofian, A.; Taghvaeipour, A.; Kamali, A. On the stiffness analysis of robotic manipulators and calculation of stiffness indices. Mech. Mach. Theory 2018, 130, 382–402. [Google Scholar] [CrossRef]
- Abdolshah, S.; Zanotto, D.; Rosati, G.; Agrawal, S.K. Optimizing stiffness and dexterity of planar adaptive cable-driven parallel robots. J. Mech. Robot. 2017, 9, 031004. [Google Scholar] [CrossRef]
- Carbone, G.; Ceccarelli, M. Comparison of indices for stiffness performance evaluation. Front. Mech. Eng. China 2010, 5, 270–278. [Google Scholar] [CrossRef]
- Yeo, S.; Yang, G.; Lim, W. Design and analysis of cable-driven manipulators with variable stiffness. Mech. Mach. Theory 2013, 69, 230–244. [Google Scholar] [CrossRef]
- Xu, Q.; Li, Y. GA-based architecture optimization of a 3-PUU parallel manipulator for stiffness performance. In Proceedings of the 2006 6th World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006; Volume 2, pp. 9099–9103. [Google Scholar]
- Liu, X.J.; Jin, Z.L.; Gao, F. Optimum design of 3-DOF spherical parallel manipulators with respect to the conditioning and stiffness indices. Mech. Mach. Theory 2000, 35, 1257–1267. [Google Scholar] [CrossRef]
- Lee, S.H.; Lee, J.H.; Yi, B.J.; Kim, S.H.; Kwak, Y.K. Optimization and experimental verification for the antagonistic stiffness in redundantly actuated mechanisms: A five-bar example. Mechatronics 2005, 15, 213–238. [Google Scholar] [CrossRef]
- Pitt, E.B.; Simaan, N.; Barth, E.J. An investigation of stiffness modulation limits in a pneumatically actuated parallel robot with actuation redundancy. In Proceedings of the ASME/BATH 2015 Symposium on Fluid Power and Motion Control, Chicago, IL, USA, 12–14 October 2015; p. V001T01A063. [Google Scholar]
- Zhou, X.; Jun, S.k.; Krovi, V. Stiffness modulation exploiting configuration redundancy in mobile cable robots. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 5934–5939. [Google Scholar]
- Alamdari, A.; Haghighi, R.; Krovi, V. Stiffness modulation in an elastic articulated-cable leg-orthosis emulator: Theory and experiment. IEEE Trans. Robot. 2018, 99, 1–14. [Google Scholar] [CrossRef]
- Orekhov, A.L.; Simaan, N. Directional Stiffness Modulation of Parallel Robots with Kinematic Redundancy and Variable Stiffness Joints. J. Mech. Robot. 2019, 1–14. [Google Scholar] [CrossRef]
- Ajoudani, A.; Tsagarakis, N.G.; Bicchi, A. On the role of robot configuration in cartesian stiffness control. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 1010–1016. [Google Scholar]
- Ficuciello, F.; Romano, A.; Villani, L.; Siciliano, B. Cartesian impedance control of redundant manipulators for human-robot co-manipulation. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 2120–2125. [Google Scholar]
- Tatlicioglu, E.; Braganza, D.; Burg, T.C.; Dawson, D.M. Adaptive control of redundant robot manipulators with sub-task objectives. Robotica 2009, 27, 873–881. [Google Scholar] [CrossRef] [Green Version]
- Merlet, J.P. Parallel Robots; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006; Volume 128. [Google Scholar]
- Alici, G.; Shirinzadeh, B. Enhanced stiffness modeling, identification and characterization for robot manipulators. IEEE Trans. Robot. 2005, 21, 554–564. [Google Scholar] [CrossRef]
- Gosselin, C. Stiffness mapping for parallel manipulators. IEEE Trans. Robot. Autom. 1990, 6, 377–382. [Google Scholar] [CrossRef]
- Kim, H.S.; Tsai, L.W. Design optimization of a Cartesian parallel manipulator. J. Mech. Des. 2003, 125, 43–51. [Google Scholar] [CrossRef]
- Görgülü, İ.; Kiper, G.; Dede, M.İ.C. A critical review of unpowered performance metrics of impedance-type haptic devices. In Proceedings of the European Conference on Mechanism Science, Aachen, Germany, 4–6 September 2018; pp. 129–136. [Google Scholar]
- Salisbury, J.K.; Craig, J.J. Articulated hands: Force control and kinematic issues. Int. J. Robot. Res. 1982, 1, 4–17. [Google Scholar] [CrossRef]
- Paul, R.P.; Stevenson, C.N. Kinematics of robot wrists. Int. J. Robot. Res. 1983, 2, 31–38. [Google Scholar] [CrossRef]
- Kim, J.O.; Khosla, K. Dexterity measures for design and control of manipulators. In Proceedings of the IEEE/RSJ International Workshop on Intelligent Robots and Systems’ 91 (Proceedings IROS’91), Osaka, Japan, 3–5 November 1991; pp. 758–763. [Google Scholar]
- Yoshikawa, T. Manipulability of robotic mechanisms. Int. J. Robot. Res. 1985, 4, 3–9. [Google Scholar] [CrossRef]
- Gosselin, C.; Angeles, J. A global performance index for the kinematic optimization of robotic manipulators. J. Mech. Des. 1991, 113, 220–226. [Google Scholar] [CrossRef]
- Li, W.; Gao, F.; Zhang, J. R-CUBE, a decoupled parallel manipulator only with revolute joints. Mech. Mach. Theory 2005, 40, 467–473. [Google Scholar] [CrossRef]
- Dhatt, G.; Lefrançois, E.; Touzot, G. Finite Element Method; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Klimchik, A.; Chablat, D.; Pashkevich, A. Stiffness modeling for perfect and non-perfect parallel manipulators under internal and external loadings. Mech. Mach. Theory 2014, 79, 1–28. [Google Scholar] [CrossRef] [Green Version]
- Deblaise, D.; Hernot, X.; Maurine, P. A systematic analytical method for PKM stiffness matrix calculation. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation (ICRA 2006), Orlando, FL, USA, 15–19 May 2006; pp. 4213–4219. [Google Scholar]
- Ghali, A.; Neville, A.; Brown, T.G. Structural Analysis: A Unified Classical and Matrix Approach; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Pashkevich, A.; Chablat, D.; Wenger, P. Stiffness analysis of overconstrained parallel manipulators. Mech. Mach. Theory 2009, 44, 966–982. [Google Scholar] [CrossRef] [Green Version]
- Wu, G.; Bai, S.; Kepler, J. Mobile platform center shift in spherical parallel manipulators with flexible limbs. Mech. Mach. Theory 2014, 75, 12–26. [Google Scholar] [CrossRef]
- Hoevenaars, A.G.; Lambert, P.; Herder, J.L. Jacobian-based stiffness analysis method for parallel manipulators with non-redundant legs. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2016, 230, 341–352. [Google Scholar] [CrossRef]
- Klimchik, A. Enhanced Stiffness Modeling of Serial and Parallel Manipulators for Robotic-Based Processing of High Performance Materials. Ph.D. Thesis, Ecole des Mines de Nantes, Nantes, France, 2011. [Google Scholar]
- Pashkevich, A.; Klimchik, A.; Chablat, D. Enhanced stiffness modeling of manipulators with passive joints. Mech. Mach. Theory 2011, 46, 662–679. [Google Scholar] [CrossRef] [Green Version]
- Carbone, G. Stiffness analysis and experimental validation of robotic systems. Front. Mech. Eng. 2011, 6, 182–196. [Google Scholar]
- Görgülü, İ.; Dede, M. Computation Time Efficient Stiffness Analysis of the Modified R-CUBE Mechanism. In Proceedings of the International Conference of IFToMM ITALY, Cassino, Italy, 29–30 November 2018; Springer: Berlin/Heidelberg, Germany, 2018; pp. 231–239. [Google Scholar]
- Stocco, L.; Salcudean, S.; Sassani, F. Matrix normalization for optimal robot design. In Proceedings of the 1998 IEEE International Conference on Robotics and Automation, Leuven, Belgium, 16–20 May 1998; Volume 2, pp. 1346–1351. [Google Scholar]
- Angeles, J. Fundamentals of Robotic Mechanical Systems; Springer: Berlin/Heidelberg, Germany, 2002; Volume 2. [Google Scholar]
- Khan, W.A.; Angeles, J. The kinetostatic optimization of robotic manipulators: The inverse and the direct problems. J. Mech. Des. 2006, 128, 168–178. [Google Scholar] [CrossRef]
- Cardou, P.; Bouchard, S.; Gosselin, C. Kinematic-sensitivity indices for dimensionally nonhomogeneous jacobian matrices. IEEE Trans. Robot. 2010, 26, 166–173. [Google Scholar] [CrossRef]
- Cao, W.a.; Ding, H.; Zhu, W. Stiffness modeling of overconstrained parallel mechanisms under considering gravity and external payloads. Mech. Mach. Theory 2019, 135, 1–16. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Matrix | Computed Function | Unit | ||
|---|---|---|---|---|---|
| (N/m) | |||||
| (N/m) | |||||
| (N/m) | |||||
| (N/m) | |||||
| (N/m) | |||||
| (Joule) | |||||
| - | |||||
| - | |||||
| - | - | - | |||
| - | - | - |
| Max | Min | |||
|---|---|---|---|---|
| 1 | ||||
| 1 | ||||
| - | - | |||
| - | - | |||
| 1 | 0 | |||
| 1 | 0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Görgülü, İ.; Dede, M.İ.C. A New Stiffness Performance Index: Volumetric Isotropy Index. Machines 2019, 7, 44. https://doi.org/10.3390/machines7020044
Görgülü İ, Dede MİC. A New Stiffness Performance Index: Volumetric Isotropy Index. Machines. 2019; 7(2):44. https://doi.org/10.3390/machines7020044
Chicago/Turabian StyleGörgülü, İbrahimcan, and Mehmet İsmet Can Dede. 2019. "A New Stiffness Performance Index: Volumetric Isotropy Index" Machines 7, no. 2: 44. https://doi.org/10.3390/machines7020044