
Improved PVTOL Test Bench for the Study of Over-Actuated Tilt-Rotor Propulsion Systems


Abstract
:1. Introduction
- There is a high degree of heterogeneity in the propulsion system configurations, including number, distribution, and operating conditions.
- There is an increasing use of distributed tilting rotors (or similar thrust vectoring elements).
- The multiplicity of propulsors and control surfaces results in a high number of control inputs, introducing an over-actuation problem, which is normally denoted as the control allocation problem in the literature (although under-actuation problems have also been treated as allocation problems by some authors).
- The control allocation problem is commonly dealt with by separating the vehicle into two parts: (1) a rigid body, which is driven by virtual control inputs (i.e., force and moment vectors), and (2) the propulsion subsystem, which is driven in such a way that the desired force and moment vectors are obtained. In practice, it is difficult to pair specific physical inputs to a particular force or moment component without introducing cross-coupling in the rigid body control loop.
- Although many control approaches have been proposed, linear Proportional Integral Derivative (PID) controllers are still used in many practical setups due to their simplicity and low computational overhead.
- There is a high level of heterogeneity in the propulsion configuration of recent VTOL vehicles with a movement towards a higher number of actuators.
- The resulting control allocation problems are highly dependent on the propulsion configuration. Therefore, the study of this issue can yield vehicle-specific results.
- The use of simplified test benches (such as the PVTOL) can aid in the study of prospective control strategies while preserving many of the dynamic and experimental complexities, allowing a more rapid development of novel/better solutions.
- The typical PVTOL test bench configuration is unable to represent many of the difficulties found in recent VTOL vehicles.
- Although non-linear control and allocation approaches can deliver improved performance for wider operating ranges, in many Unmanned Aerial Vehicle (UAV) applications, linear controllers and allocation approaches are still being used and researched due to their simplicity and efficiency.
- A novel PVTOL test bench configuration containing an arbitrary number of co-linear tilting rotors is proposed as a progression of the traditional PVTOL test bench configuration. This configuration can reproduce several of the interesting issues found in novel VTOL vehicles, mainly the control allocation and cross-coupling problems. In addition, this configuration can be easily extended to include an arbitrary number of co-planar tilting propulsors, so that a wider range of vehicles can be mimicked.
- A general method for obtaining a closed form of the linearization of the propulsion model for the modified PVTOL configuration is presented. This can be useful because, as mentioned before, many control allocation strategies depend on it.
- A simple test bench, based on the modified PVTOL configuration, is implemented experimentally. This simple test bench allows testing control allocation and cross-coupling problems.
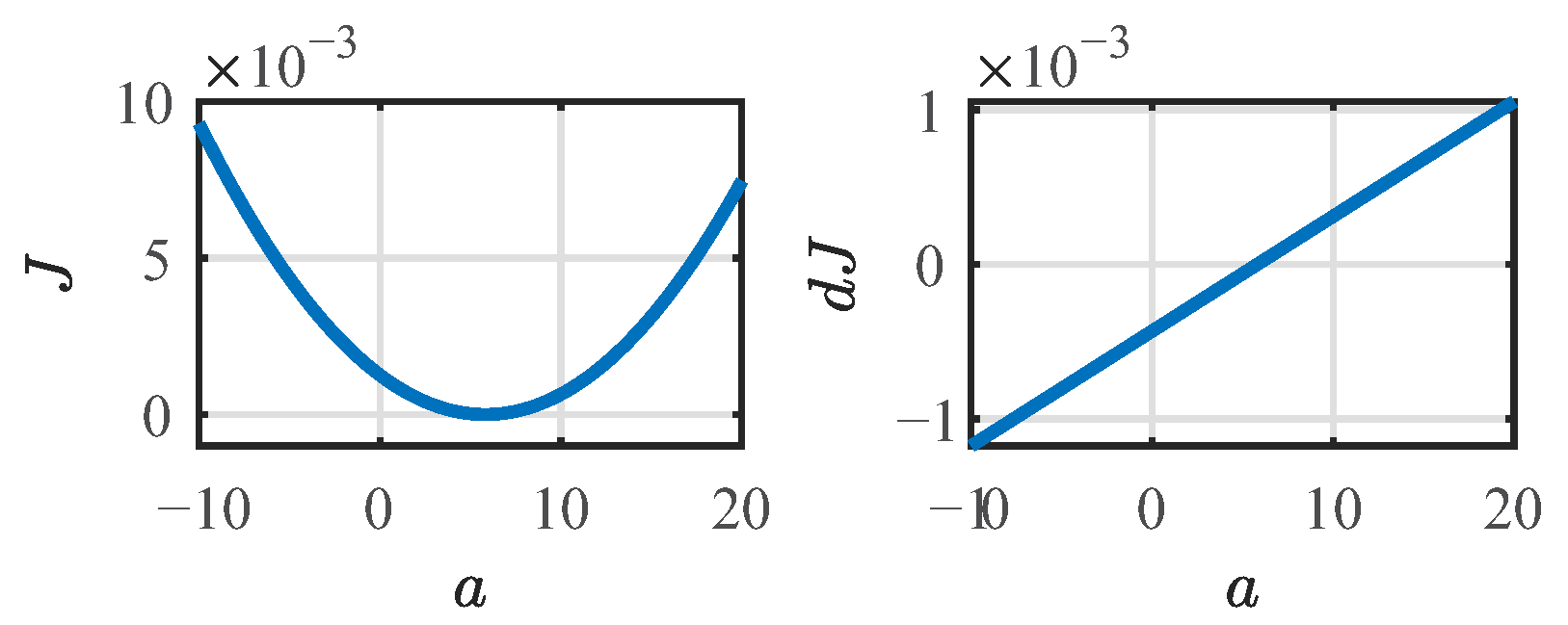
- A simple decoupling control allocation scheme for the test bench, based on a linear approximation derived through Singular Value Decomposition (SVD), is presented. This approach allows defining an optimal solution for the allocation problem of the modified PVTOL configuration. The resulting optimization can solve the over-actuation problem by introducing a wide range of considerations. In this case, low-error and practical physical considerations are used.
- The proposed SVD control allocation approach is compared with a more traditional input mixer algorithm, derived from physical insight, both through simulations and using the experimental test bench. The results show that the proposed control allocation scheme allows decreasing the cross-coupling with a simple static decoupling matrix.
2. Materials and Methods
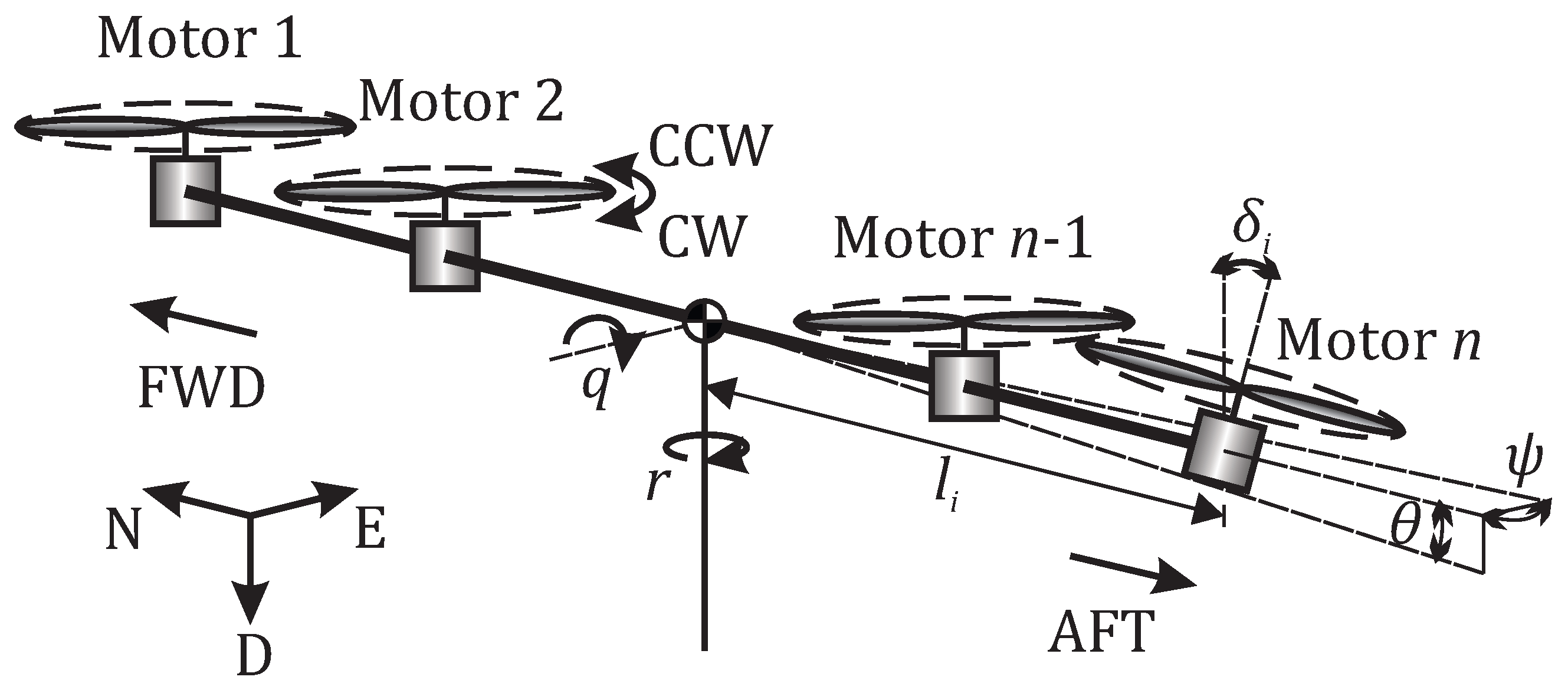
2.1. A PVTOL with an Arbitrary Number of Co-Linear Tilting Rotors
- Matrix A contains information regarding the physical position and rotation direction of each propeller. Since these properties are normally constant, updating matrix A is not necessary when calculating a linear approximation on a different operating point. However, analyzing its structure could be useful to determine which particular propulsive configuration is better for particular applications.
- Matrix B contains information regarding the tilt angle of each of the propellers. Depending on the operating range and behavior of the propulsion system, this matrix could be the most sensible for operating point modifications, and should be updated accordingly in scheduling approaches.
- Matrix C contains information regarding the thrust force of each propeller. This matrix could also require regular updates in a scheduling approach depending on the operating behavior of the vehicle.
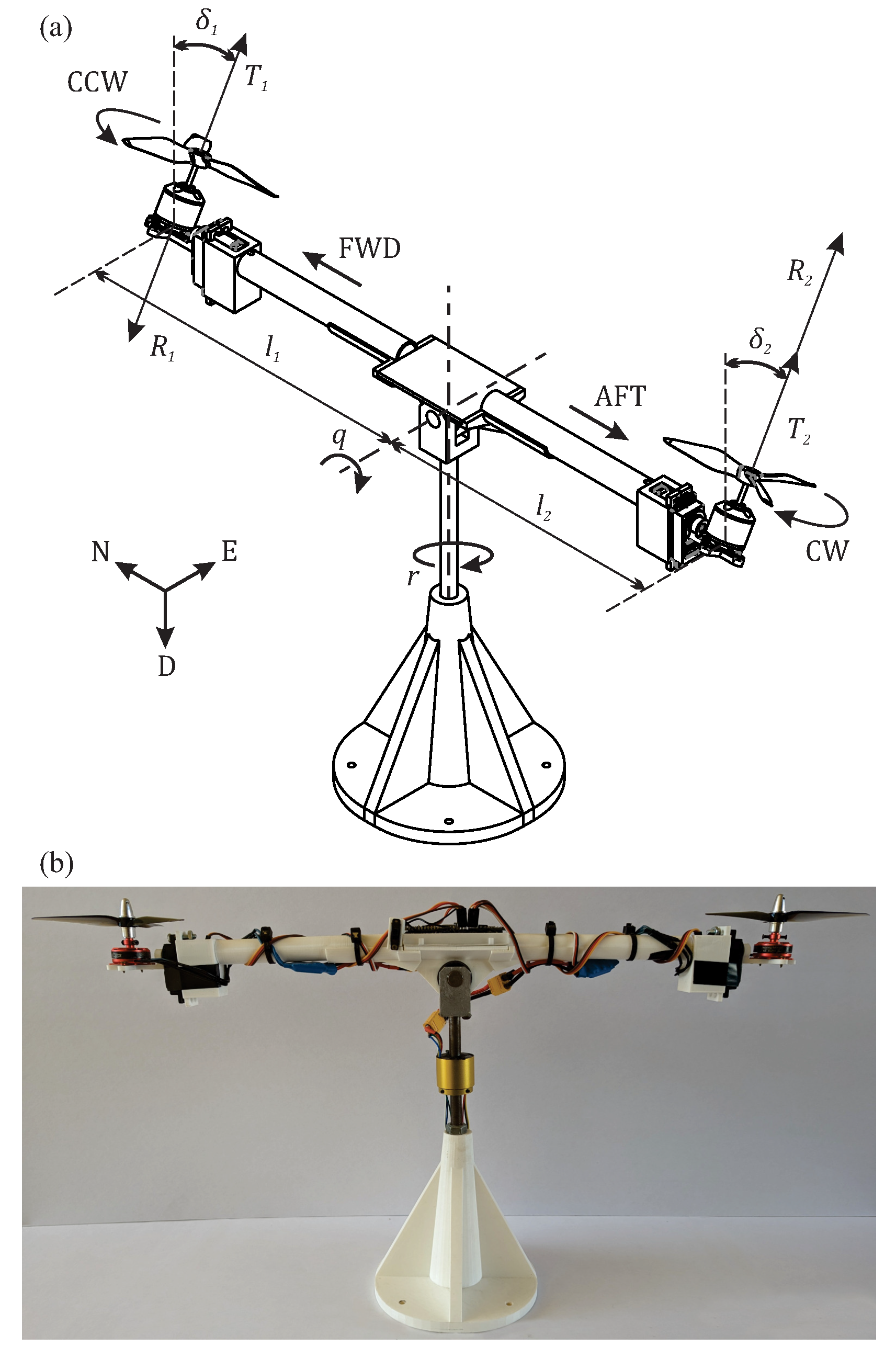
2.2. Experimental Test Bench
- Two 2304 Racestar brushless motors (81 W max power).
- Two Gemfan 51466 three-blade propellers, one CW and one CCW.
- Two MG995 servo-motors.
- One BNO055 absolute orientation sensor.
- Input variables:
- –
- Right motor thrust ;
- –
- Left motor thrust ;
- –
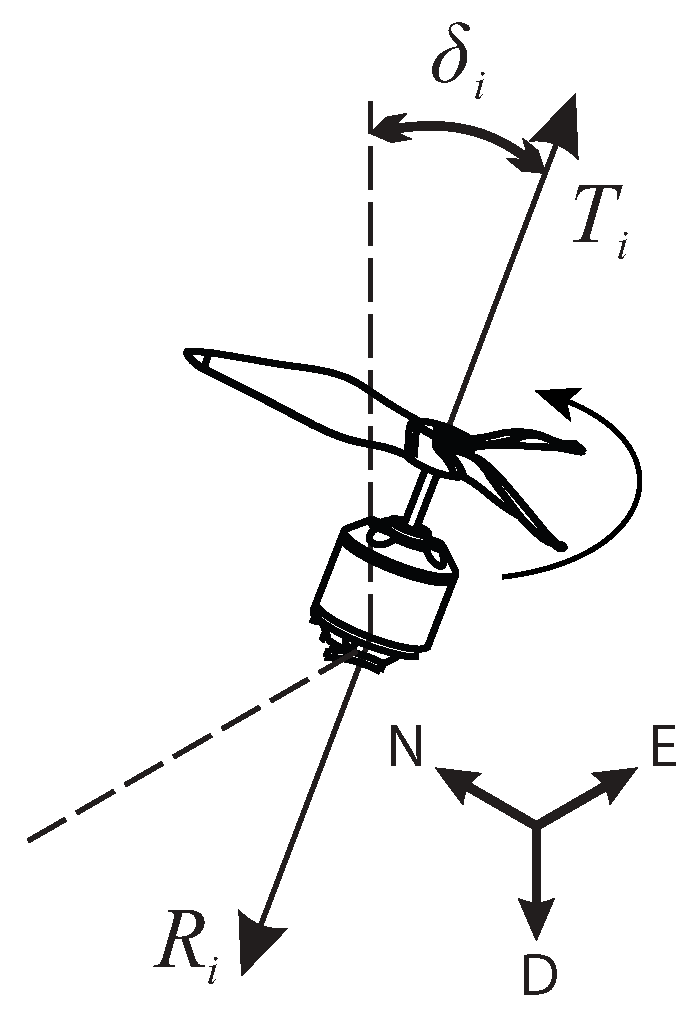
- Tilt angle of right motor ;
- –
- Tilt angle of left motor .
- Output variables:
- –
- Pitch rate ;
- –
- Yaw rate ;
- –
- Pitch angle ;
- –
- Yaw angle .
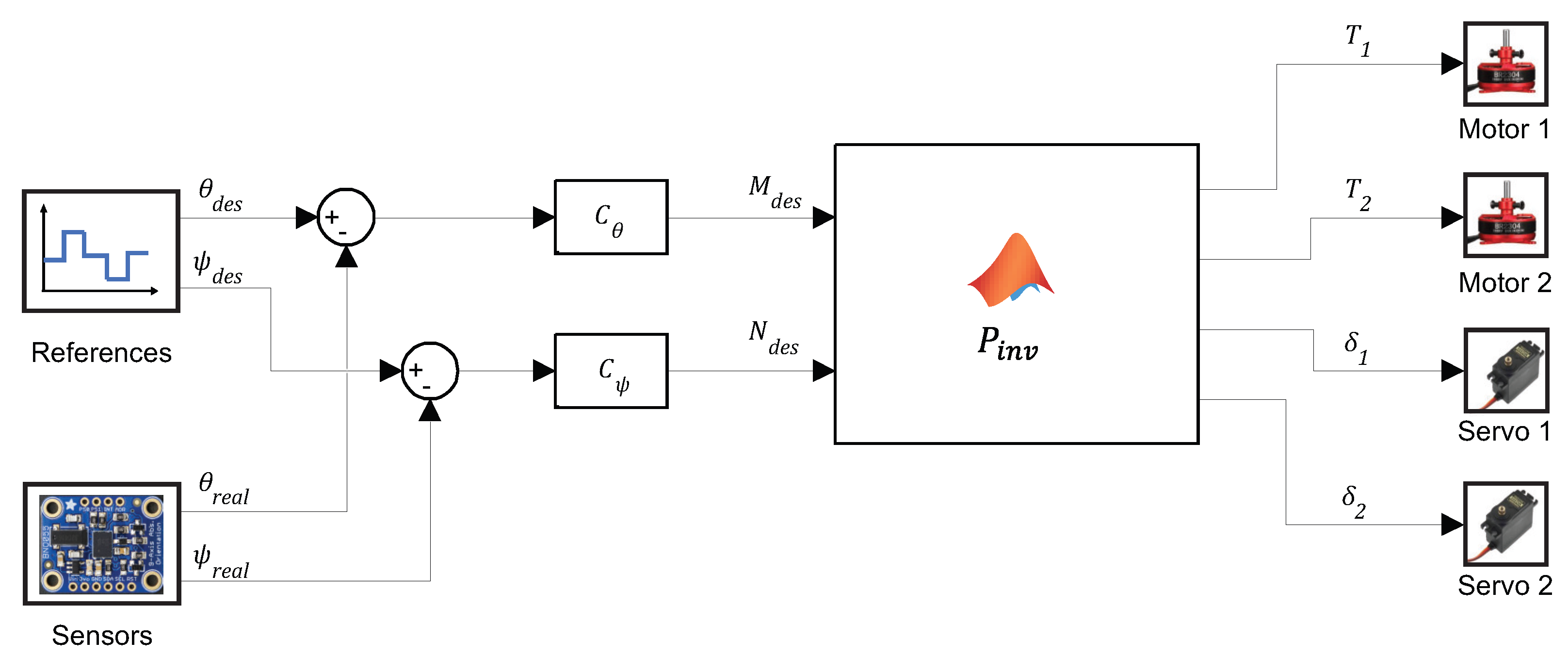
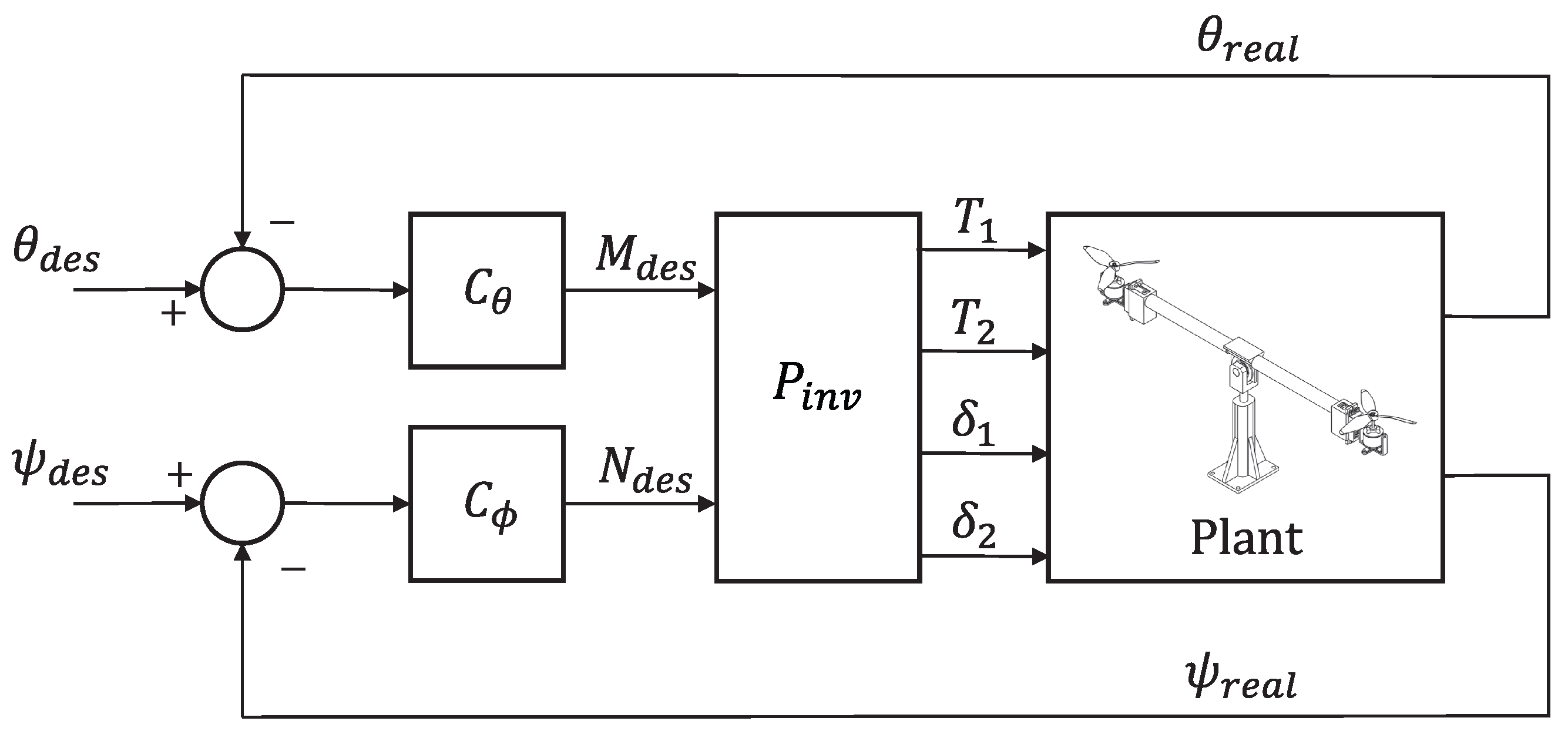
2.3. Control Allocation Problem
2.3.1. Physical Intuition-Based Decentralized Control Allocation
- A decentralized control approach for the pitch and yaw angles is sufficient to stabilize the test bench. This implies that pitch and yaw moments are derived separately without considering their interaction. This normally implies, for instance, that when calculating the pitch angle input mixer (directly related to ), it is assumed that . In addition, if the pitch angle mixer also affects the yawing moment N, then these effects are neglected, or at best considered as input perturbations for the yaw angle controller. That is, any residual cross-coupling is neglected.
- A small range of operation for the tilt-rotors is enough to stabilize the test bench. This assumption allows maintaining the focus of this study on the linear elements of the control allocation problem, which is the basis of most scheduling approaches. Later, it will be confirmed experimentally that indeed only small tilt angles are required for the stabilization of this PVTOL configuration. Nonetheless, extension of these results for wider operating ranges will be forthcoming in future studies.
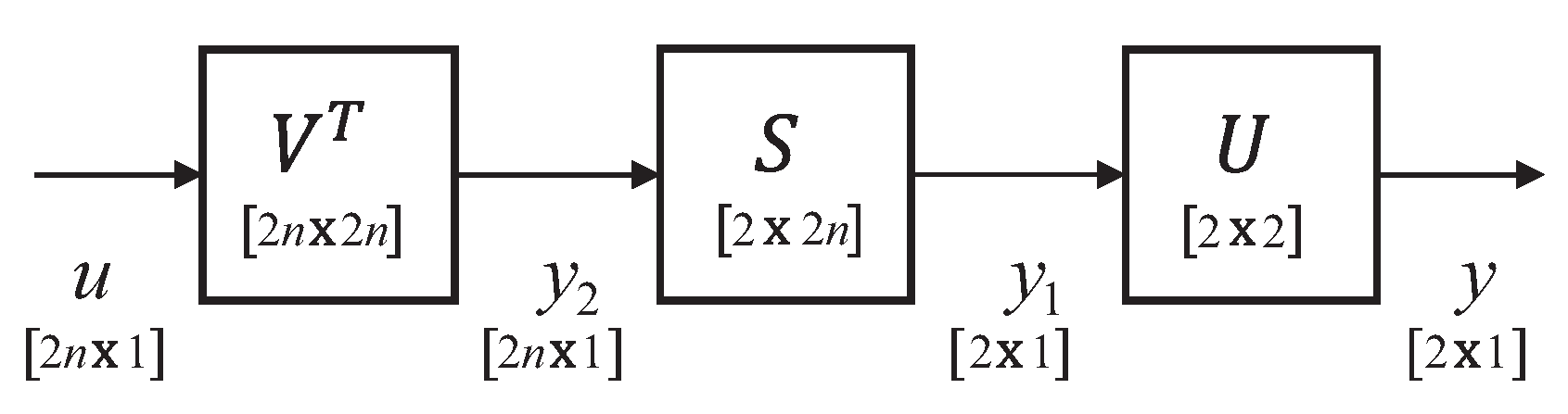
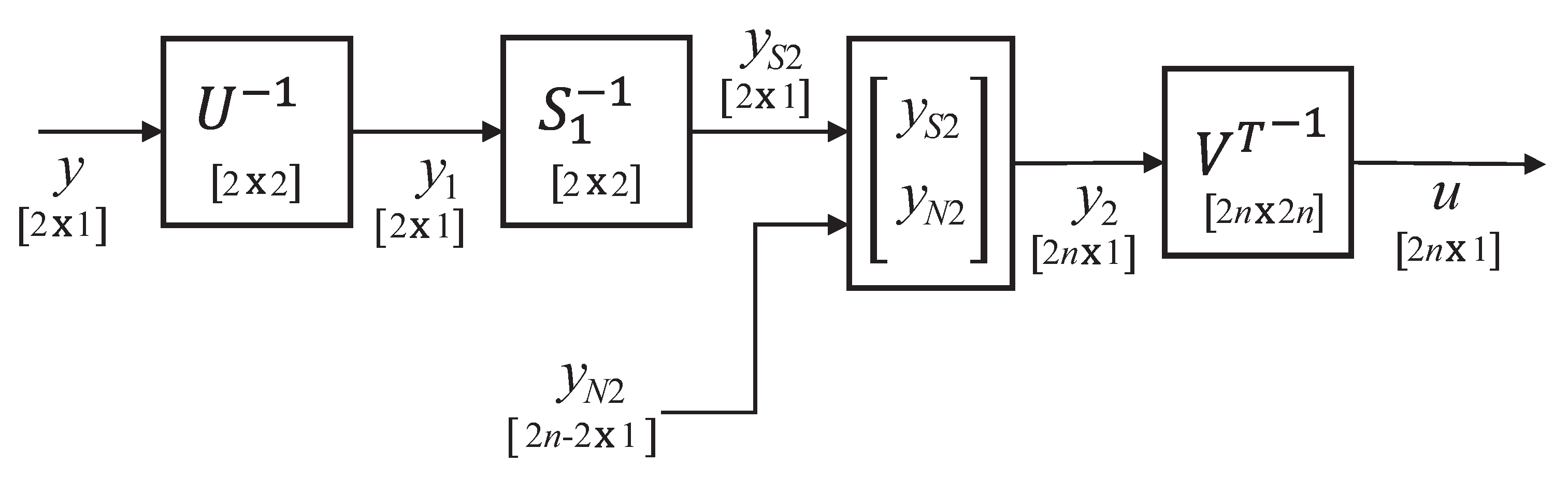
2.3.2. Singular Value Decomposition Control Allocation
2.3.3. SVD-Based Control Allocation Configuration
2.3.4. Final Mixer Algorithm Comparison
3. Results
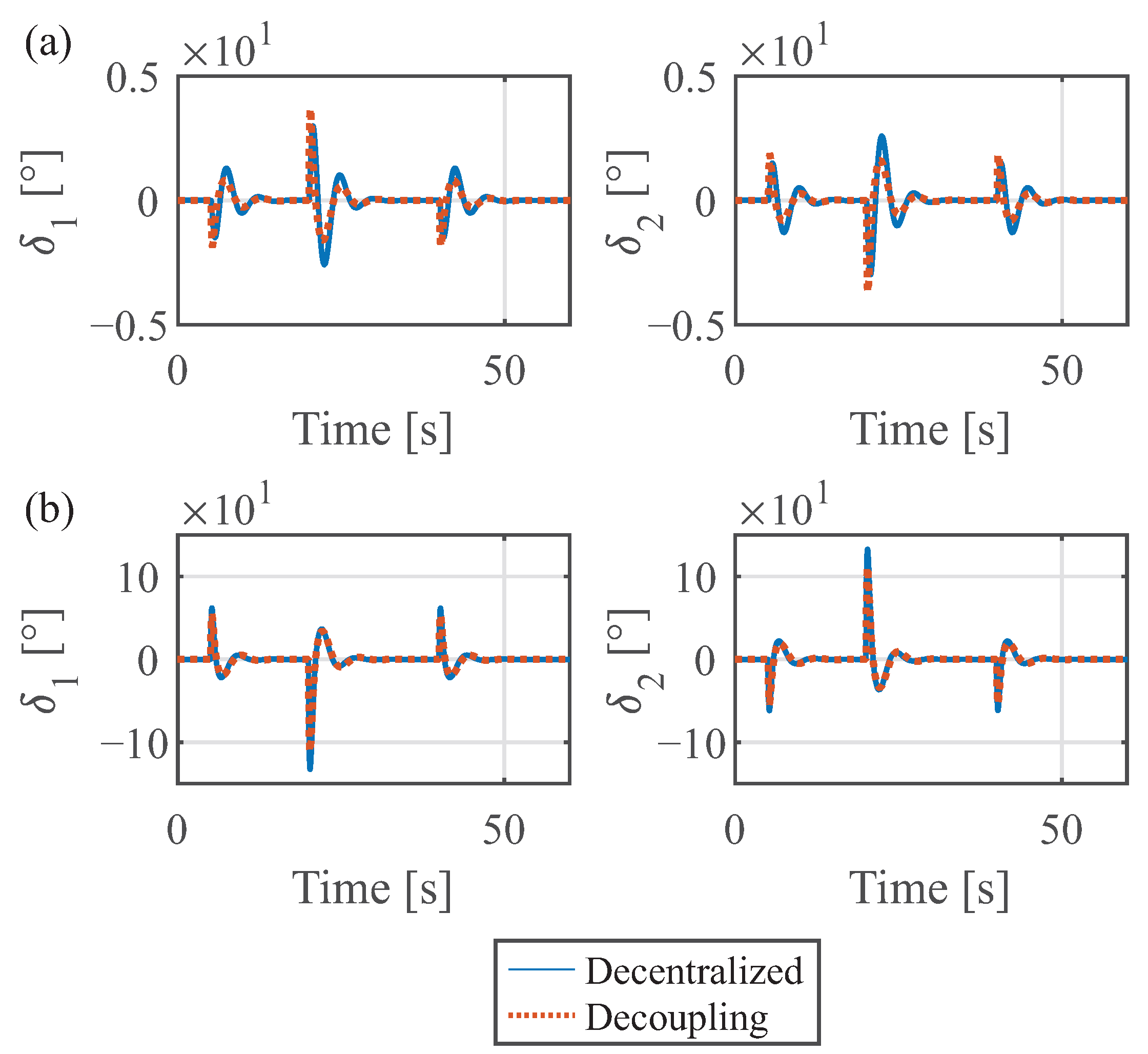
3.1. Simulation Results
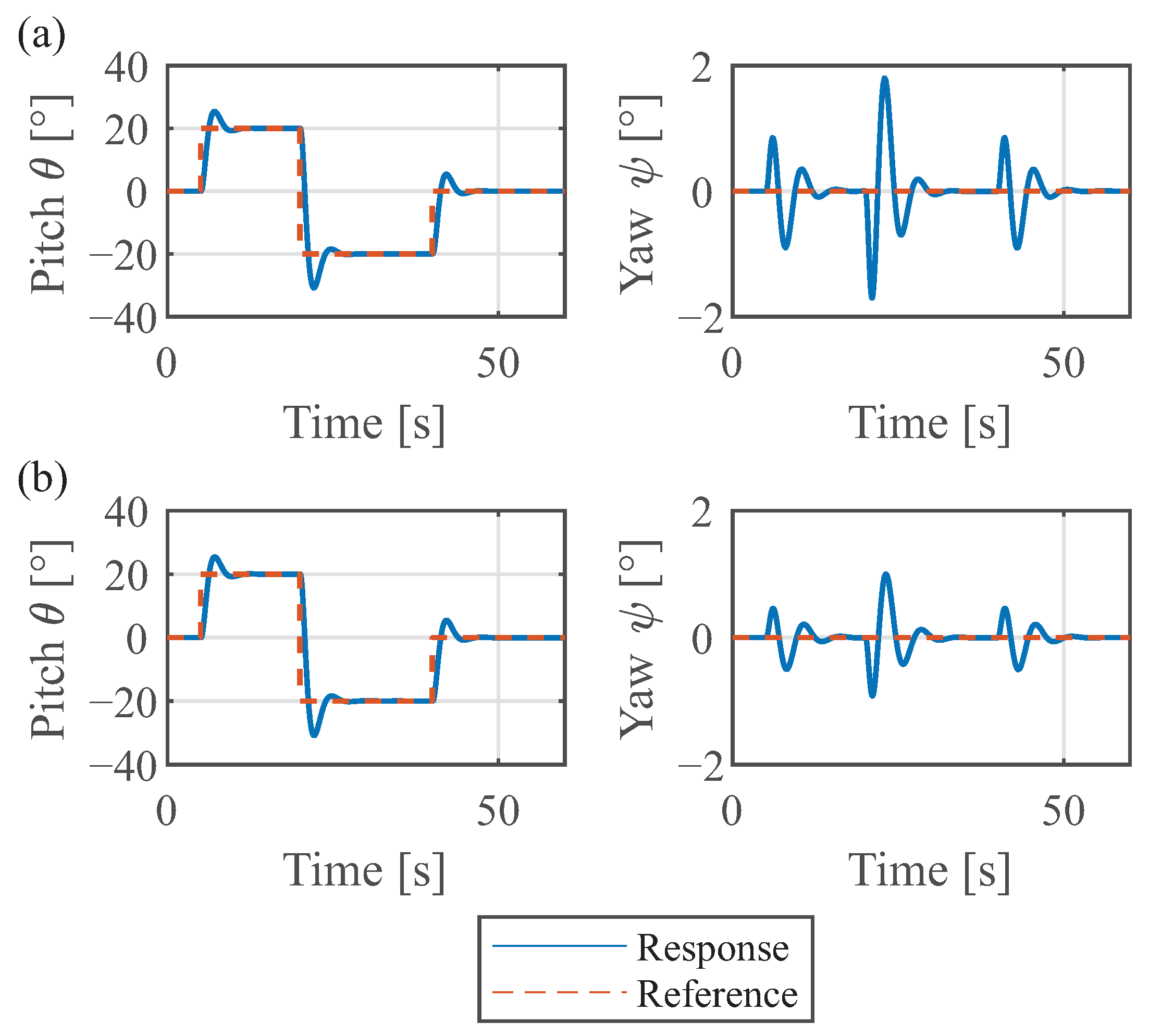
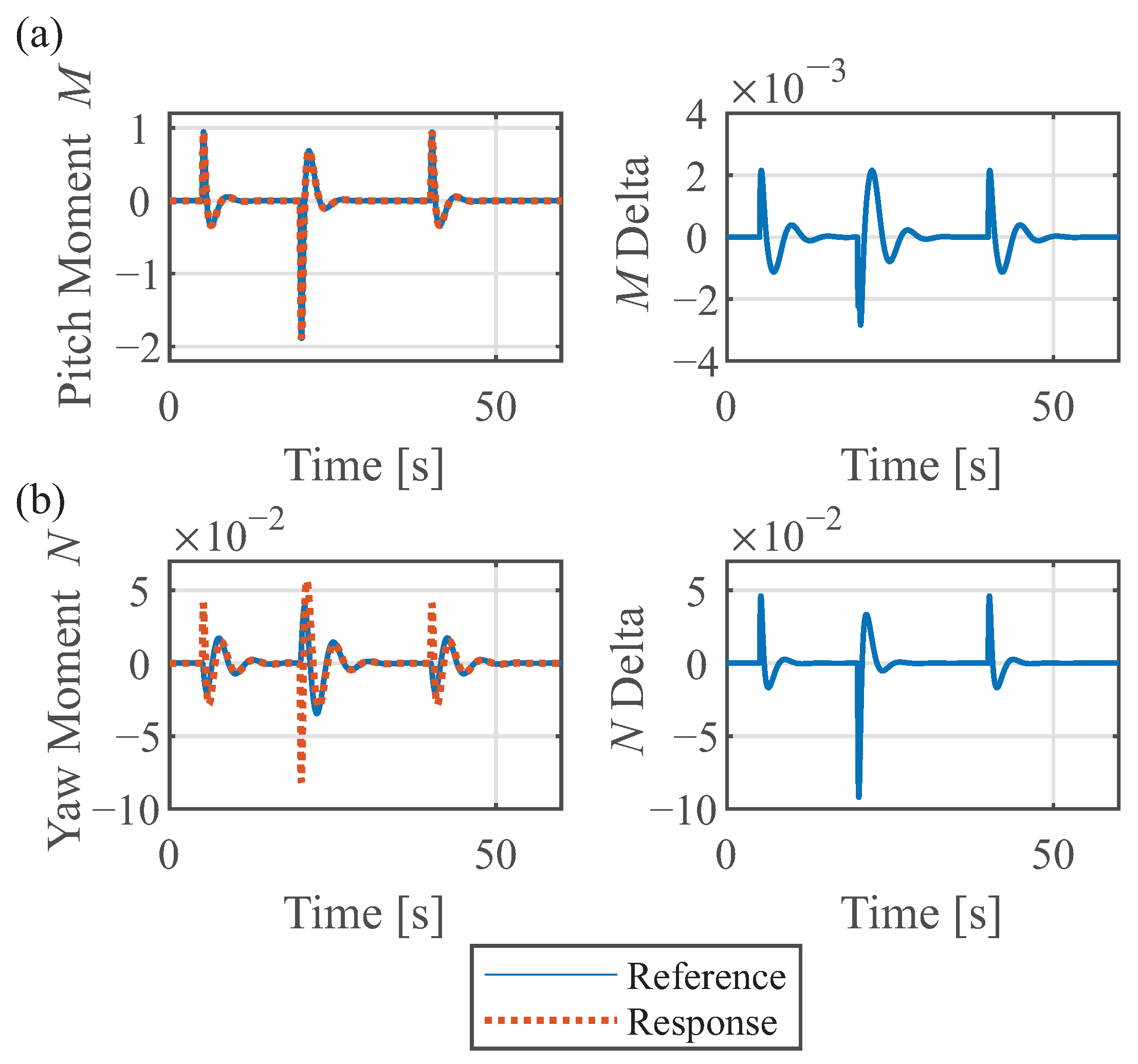
- Pitch-Varying Case: The pitch reference changes in steps, while the yaw reference remains constant at zero.
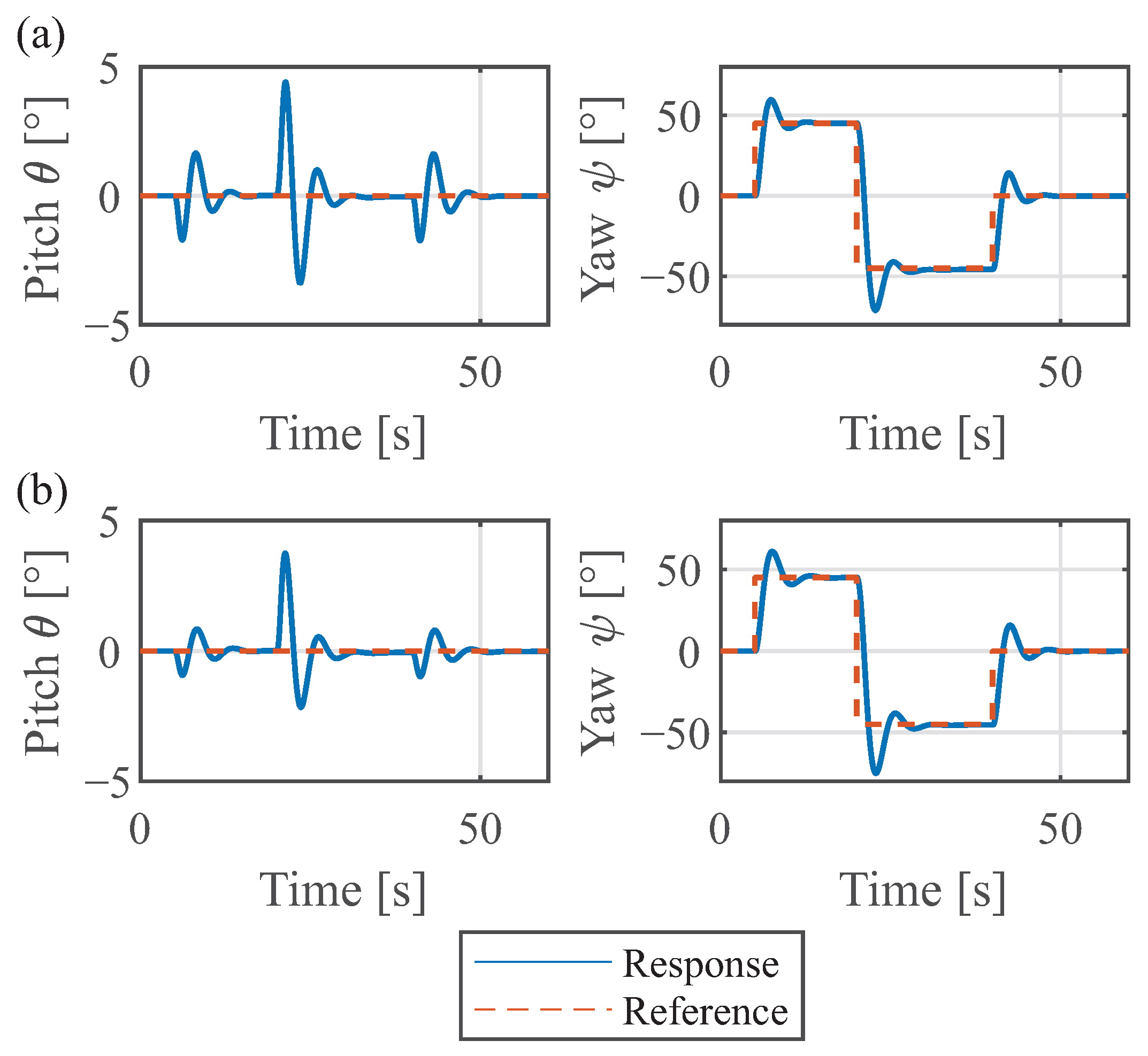
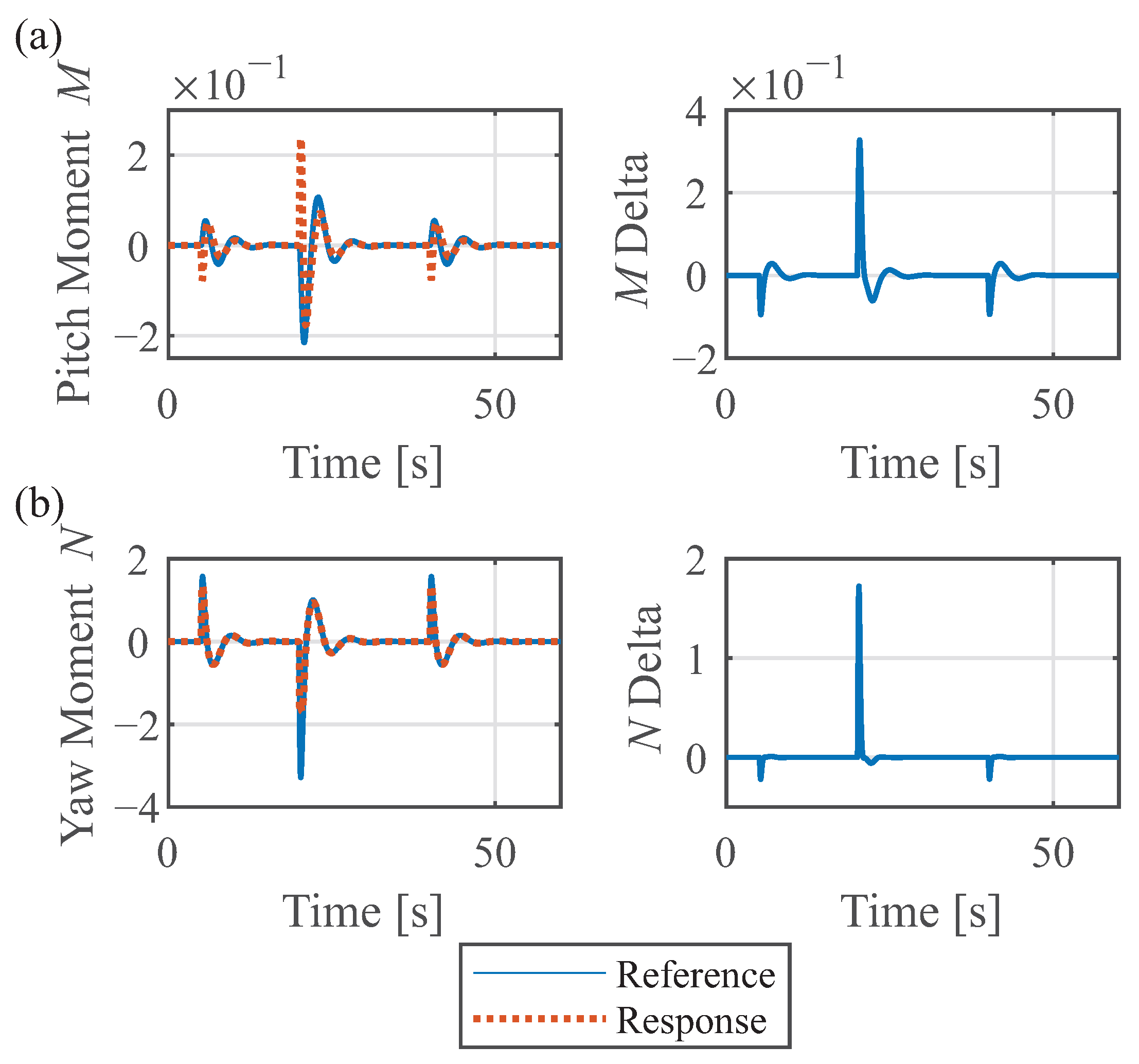
- Yaw-Varying Case: The yaw reference changes in steps, while the pitch reference remains constant at zero.
3.1.1. Pitch-Varying Case
3.1.2. Yaw-Varying Case
3.1.3. Discussion
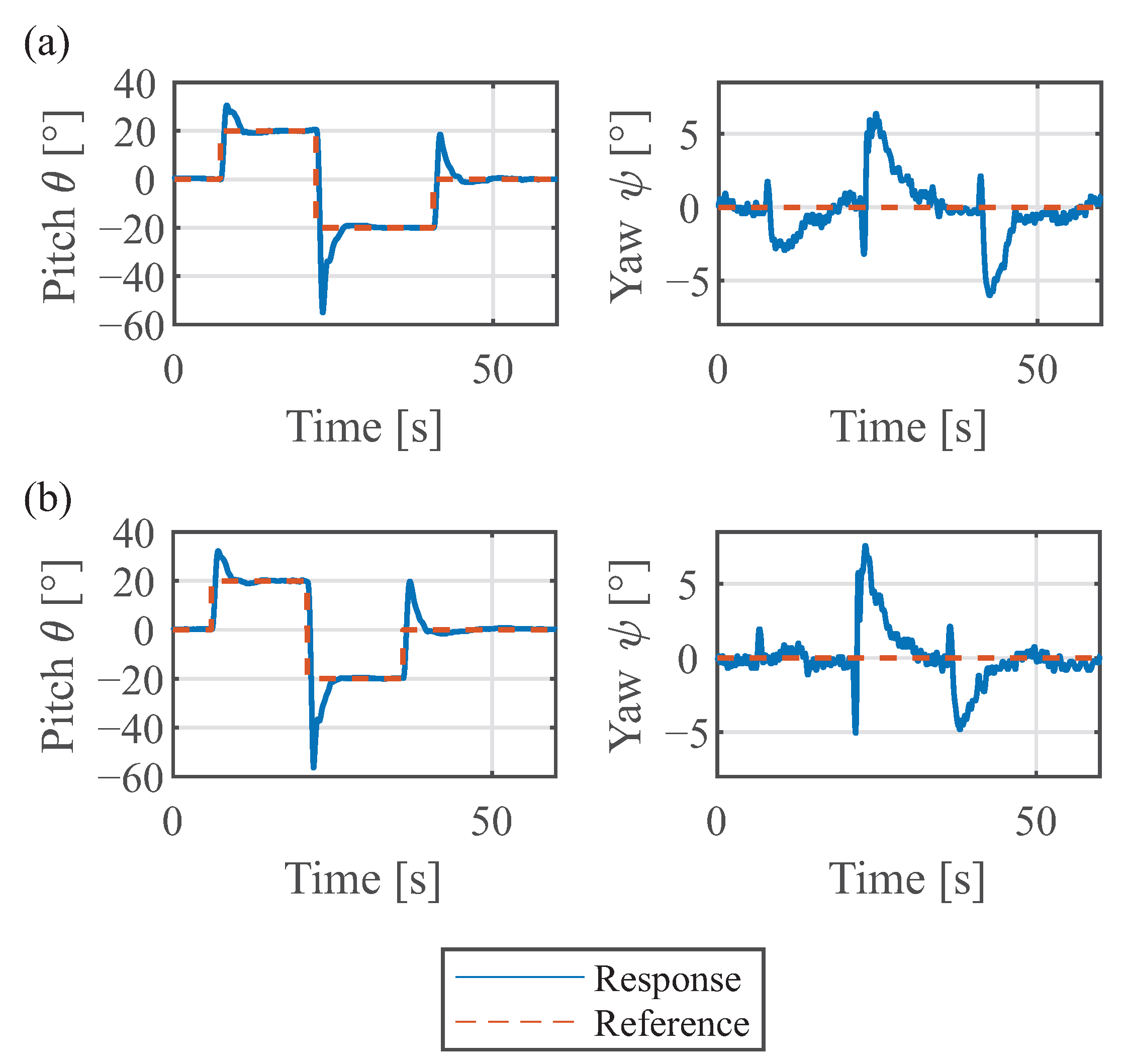
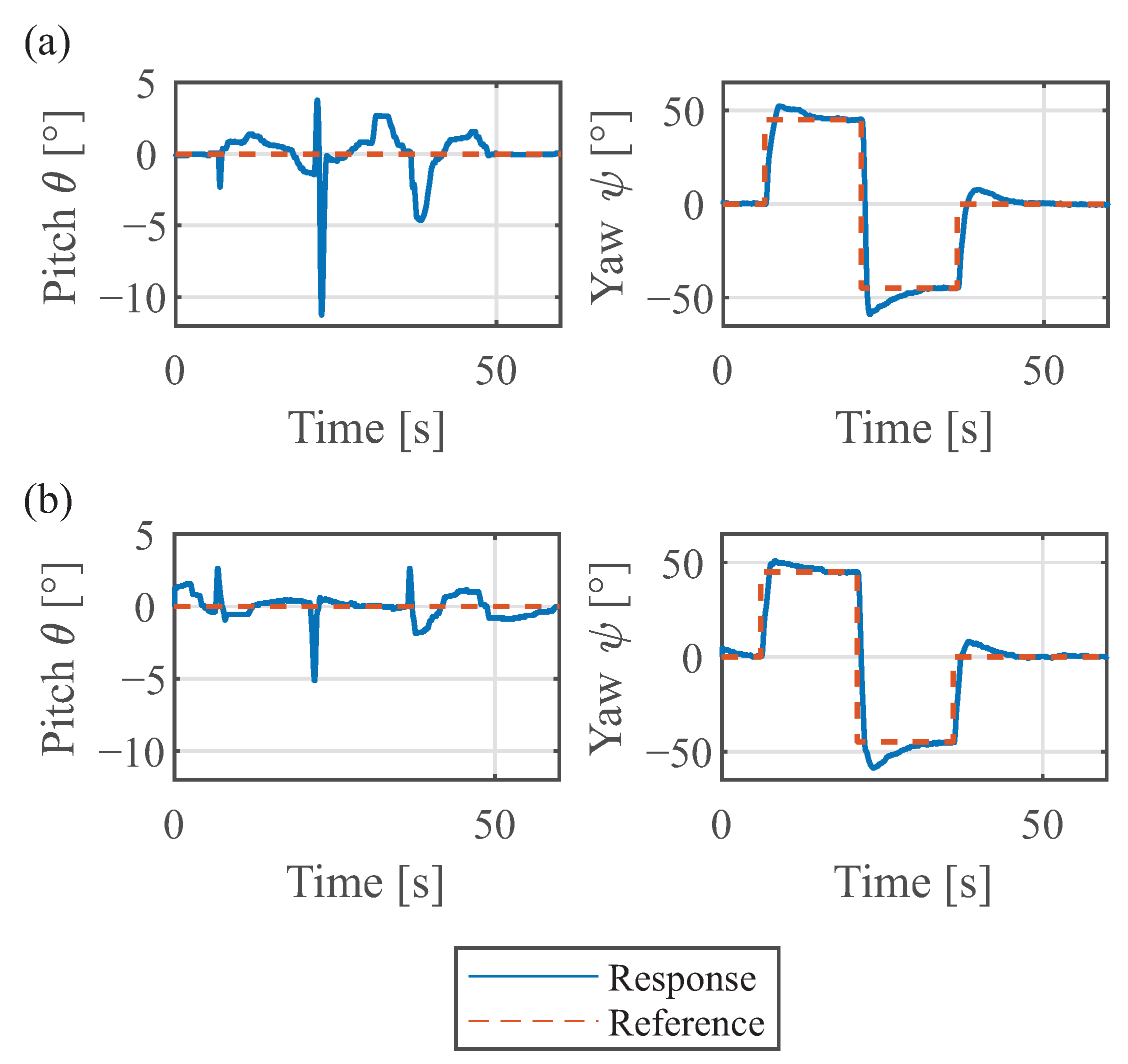
3.2. Experimental Results
3.2.1. Pitch-Varying Case
3.2.2. Yaw-Varying Case
3.3. Quantitative Analysis
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- EASA. MOC SC-VTOL, Proposed Means of Compliance with the Special Condition VTOL; Technical Report; European Union Aviation Safety Agency: Cologne, Germany, 2022. [Google Scholar]
- EASA. RMT.0731, Terms of Reference for Rulemaking Task, New Air Mobility; Technical Report; European Union Aviation Safety Agency: Cologne, Germany, 2021. [Google Scholar]
- Wang, X.; Cai, L. Mathematical modeling and control of a tilt-rotor aircraft. Aerosp. Sci. Technol. 2015, 47, 473–492. [Google Scholar] [CrossRef]
- Kong, Z.; Lu, Q. Mathematical Modeling and modal switching control of a novel tiltrotor UAV. J. Robot. 2018, 2018, 8641731. [Google Scholar] [CrossRef]
- Lu, K.; Liu, C.; Li, C.; Chen, R. Flight Dynamics Modeling and Dynamic Stability Analysis of tilt-rotor aircraft. Int. J. Aerosp. Eng. 2019, 2019, 5737212. [Google Scholar] [CrossRef]
- Sheng, H.; Zhang, C.; Xiang, Y. Mathematical Modeling and Stability Analysis of tiltrotor aircraft. Drones 2022, 6, 92. [Google Scholar] [CrossRef]
- Çakıcı, F.; Leblebicioğlu, M.K. Modeling and simulation of a small-sized tiltrotor UAV. J. Def. Model. Simul. Appl. Methodol. Technol. 2011, 9, 335–345. [Google Scholar] [CrossRef]
- Chen, C.; Shen, L.; Zhang, D.; Zhang, J. Mathematical Modeling and control of a tiltrotor UAV. In Proceedings of the 2016 IEEE International Conference on Information and Automation (ICIA), Ningbo, China, 1–3 August 2016. [Google Scholar] [CrossRef]
- Liu, Z.; He, Y.; Yang, L.; Han, J. Control techniques of Tilt Rotor Unmanned Aerial Vehicle Systems: A Review. Chin. J. Aeronaut. 2017, 30, 135–148. [Google Scholar] [CrossRef]
- Hegde, N.T.; George, V.; Nayak, C.G.; Kumar, K. Design, dynamic modelling and control of tilt-rotor uavs: A Review. Int. J. Intell. Unmanned Syst. 2019, 8, 143–161. [Google Scholar] [CrossRef]
- Bacchini, A.; Cestino, E. Electric VTOL Configurations Comparison. Aerospace 2019, 6, 26. [Google Scholar] [CrossRef]
- Amezquita-Brooks, L.; Liceaga-Castro, E.; Gonzalez-Sanchez, M.; Garcia-Salazar, O.; Martinez-Vazquez, D. Towards a standard design model for quad-rotors: A review of current models, their accuracy and a novel simplified model. Prog. Aerosp. Sci. 2017, 95, 1–23. [Google Scholar] [CrossRef]
- Amezquita-Brooks, L.; Hernandez-Alcantara, D.; Santana-Delgado, C.; Covarrubias-Fabela, R.; Garcia-Salazar, O.; Ramirez-Mendoza, A.M.E. Improved Model for Micro-UAV Propulsion Systems: Characterization and Applications. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 2174–2197. [Google Scholar] [CrossRef]
- Grau, S.; Kapitola, S.; Weiss, S.; Noack, D. Control of an over-actuated spacecraft using a combination of a fluid actuator and reaction wheels. Acta Astronaut. 2021, 178, 870–880. [Google Scholar] [CrossRef]
- Qin, Z.; Liu, K.; Zhao, X. A smooth control allocation method for a distributed electric propulsion VTOL aircraft test platform. IET Control Theory Appl. 2023, 17, 925–942. [Google Scholar] [CrossRef]
- Santos, M.; Honório, L.; Moreira, A.; Garcia, P.; Silva, M.; Vidal, V. Analysis of a Fast Control Allocation approach for nonlinear over-actuated systems. ISA Trans. 2022, 126, 545–561. [Google Scholar] [CrossRef] [PubMed]
- Hamandi, M.; Usai, F.; Sablé, Q.; Staub, N.; Tognon, M.; Franchi, A. Design of multirotor aerial vehicles: A taxonomy based on input allocation. Int. J. Robot. Res. 2021, 40, 027836492110259. [Google Scholar] [CrossRef]
- Zheng, X.; Yang, X. Improved adaptive NN backstepping control design for a perturbed PVTOL aircraft. Neurocomputing 2020, 410, 51–60. [Google Scholar] [CrossRef]
- Bonilla, M.; Blas, L.; Azhmyakov, V.; Malabre, M.; Salazar, S. Robust structural feedback linearization based on the nonlinearities rejection. J. Frankl. Inst. 2020, 357, 2232–2262. [Google Scholar] [CrossRef]
- Łakomy, K.; Madonski, R. Cascade extended state observer for active disturbance rejection control applications under measurement noise. ISA Trans. 2021, 109, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Offermann, A.; Castillo, P.; Miras, J.D. Control of a PVTOL with tilting rotors. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019. [Google Scholar] [CrossRef]
- Harindranath, A.; Arora, M. A Systematic Review of User-Conducted Calibration Methods for MEMS-based IMUs. Measurement 2023, 114001. [Google Scholar] [CrossRef]
- Otegui, J.; Bahillo, A.; Lopetegi, I.; Díez, L.E. Performance Evaluation of Different Grade IMUs for Diagnosis Applications in Land Vehicular Multi-Sensor Architectures. IEEE Sens. J. 2021, 21, 2658–2668. [Google Scholar] [CrossRef]
- de Alteriis, G.; Conte, C.; Lo Moriello, R.S.; Accardo, D. Use of Consumer-Grade MEMS Inertial Sensors for Accurate Attitude Determination of Drones. In Proceedings of the 2020 IEEE 7th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Pisa, Italy, 22–24 June 2020; pp. 534–538. [Google Scholar] [CrossRef]
- Villarreal Valderrama, J.F.; Takano, L.; Liceaga-Castro, E.; Hernandez-Alcantara, D.; Zambrano-Robledo, P.D.C.; Amezquita-Brooks, L. An integral approach for aircraft pitch control and instrumentation in a wind-tunnel. Aircr. Eng. Aerosp. Technol. 2020, 92, 1111–1123. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Value |
|---|---|
| 0° | |
| 0° | |
| Requirement | Pitch | Yaw |
|---|---|---|
| Overshoot | <35% | <25% |
| Settling Time | <11 s | <15 s |
| Constant | Pitch | Yaw |
|---|---|---|
| Proportional | 2 | 1.5 |
| Integral | 0.1 | 0.1 |
| Derivative | 1.5 | 1 |
| Constant | Pitch | Yaw |
|---|---|---|
| Proportional | 1.5 | 1.5 |
| Integral | 1 | 0.5 |
| Derivative | 0.5 | 1 |
| Experiment | DoF | Decentralized | Decoupling | % |
|---|---|---|---|---|
| Pitch | Pitch | 37.4525 | 38.2600 | 2.1560 |
| Variation | Yaw | 4.1196 | 3.2768 | −20.4583 |
| Yaw | Pitch | 2.3904 | 0.7042 | −70.5405 |
| Variation | Yaw | 118.6156 | 120.5088 | 1.5960 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amezquita-Brooks, L.; Maciel-Martínez, E.; Hernandez-Alcantara, D. Improved PVTOL Test Bench for the Study of Over-Actuated Tilt-Rotor Propulsion Systems. Machines 2024, 12, 46. https://doi.org/10.3390/machines12010046
Amezquita-Brooks L, Maciel-Martínez E, Hernandez-Alcantara D. Improved PVTOL Test Bench for the Study of Over-Actuated Tilt-Rotor Propulsion Systems. Machines. 2024; 12(1):46. https://doi.org/10.3390/machines12010046
Chicago/Turabian StyleAmezquita-Brooks, Luis, Eber Maciel-Martínez, and Diana Hernandez-Alcantara. 2024. "Improved PVTOL Test Bench for the Study of Over-Actuated Tilt-Rotor Propulsion Systems" Machines 12, no. 1: 46. https://doi.org/10.3390/machines12010046