

A Conceptual Framework for Economic Analysis of Different Law Enforcement Drones


Abstract
:1. Introduction
2. Literature Review
3. Materials and Methods
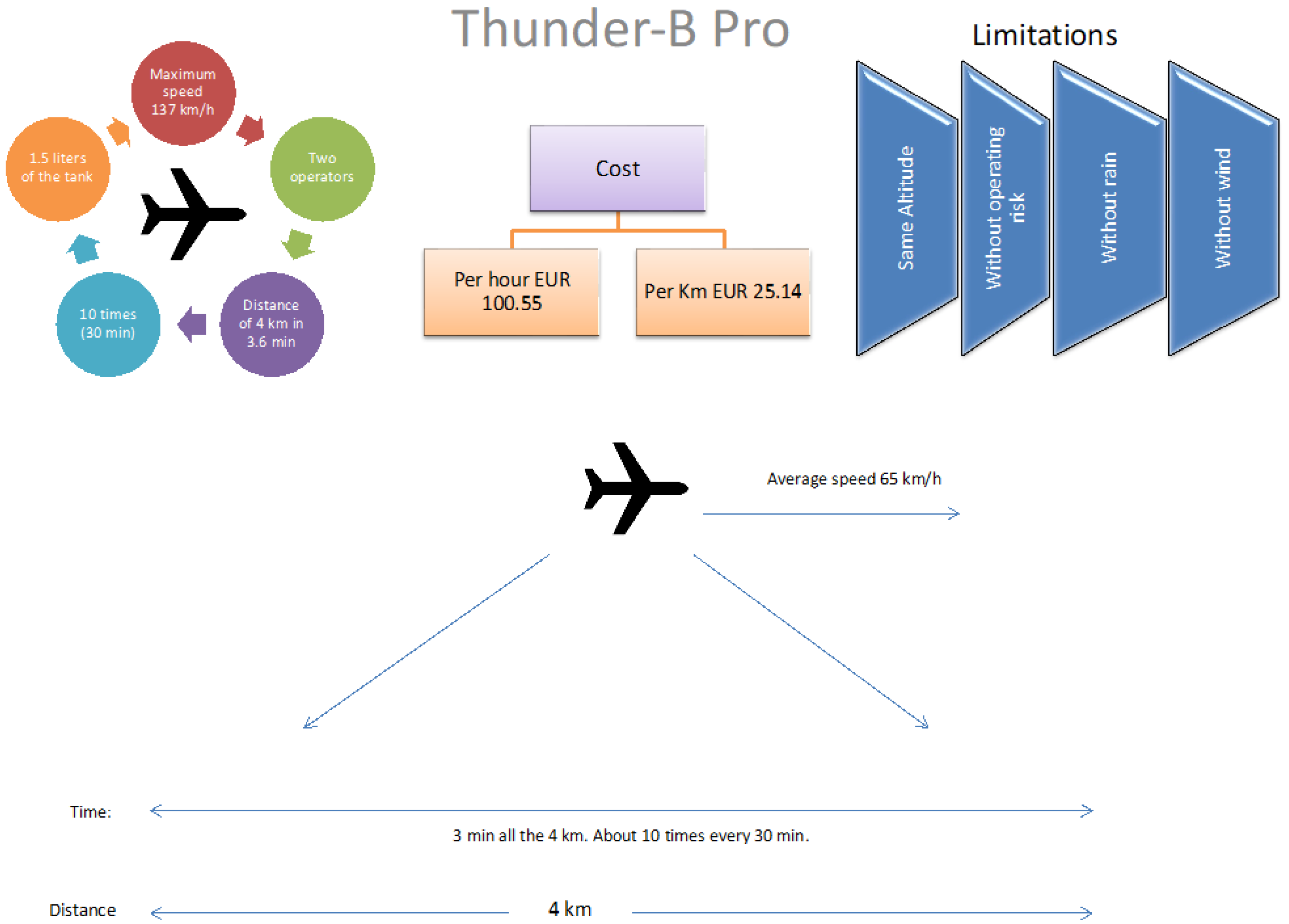
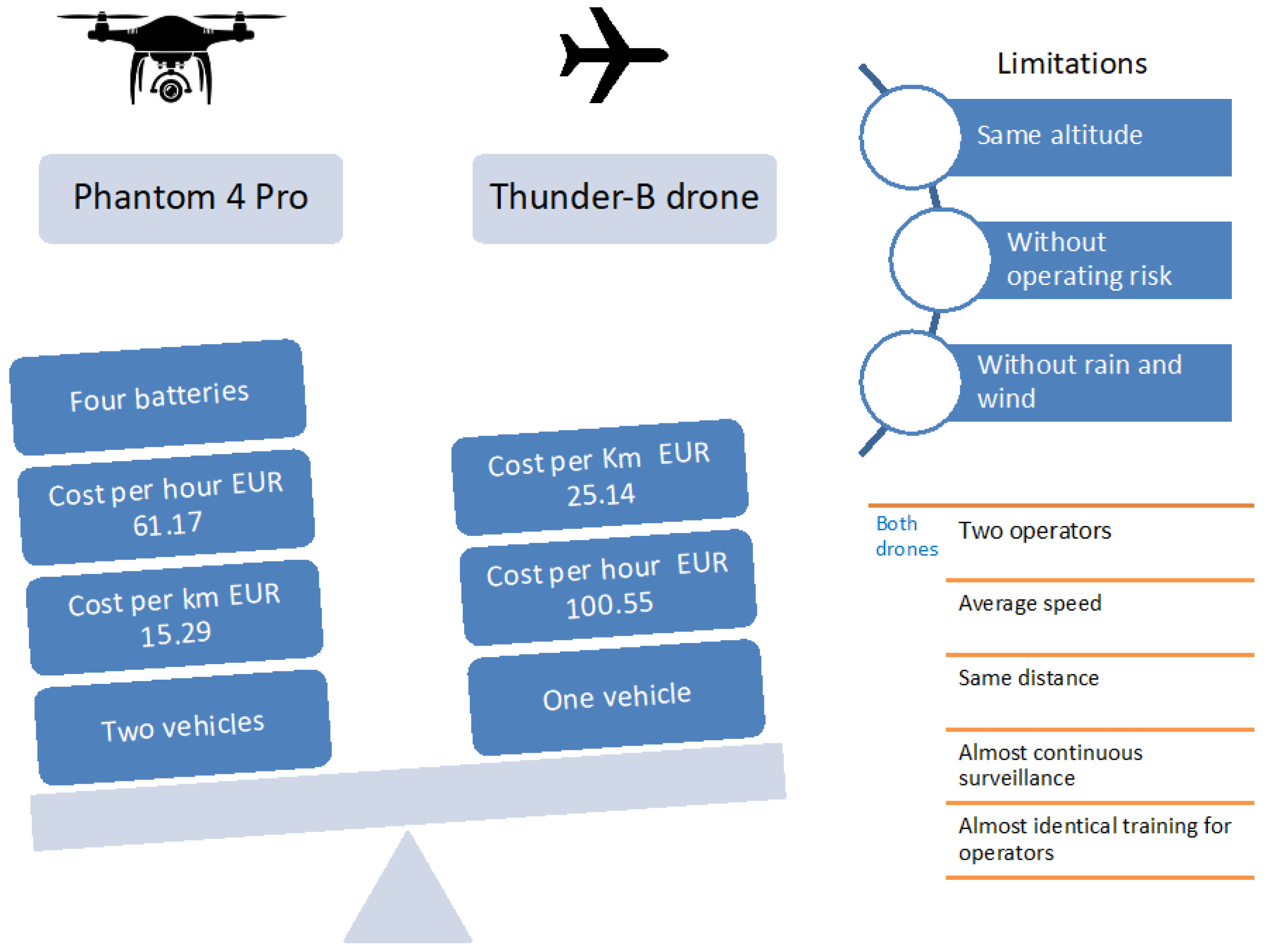
3.1. Vehicle Description and Characteristics
3.2. Cost Calculation Methodology
- where Cc is the capital/purchasing cost
- Ca is the annual operation and maintenance cost
- t are the years of operation and
- r the opportunity cost of capital (OCC).
3.3. Unit Cost Calculation
4. Results
4.1. Cost Estimations for 4 h Flight
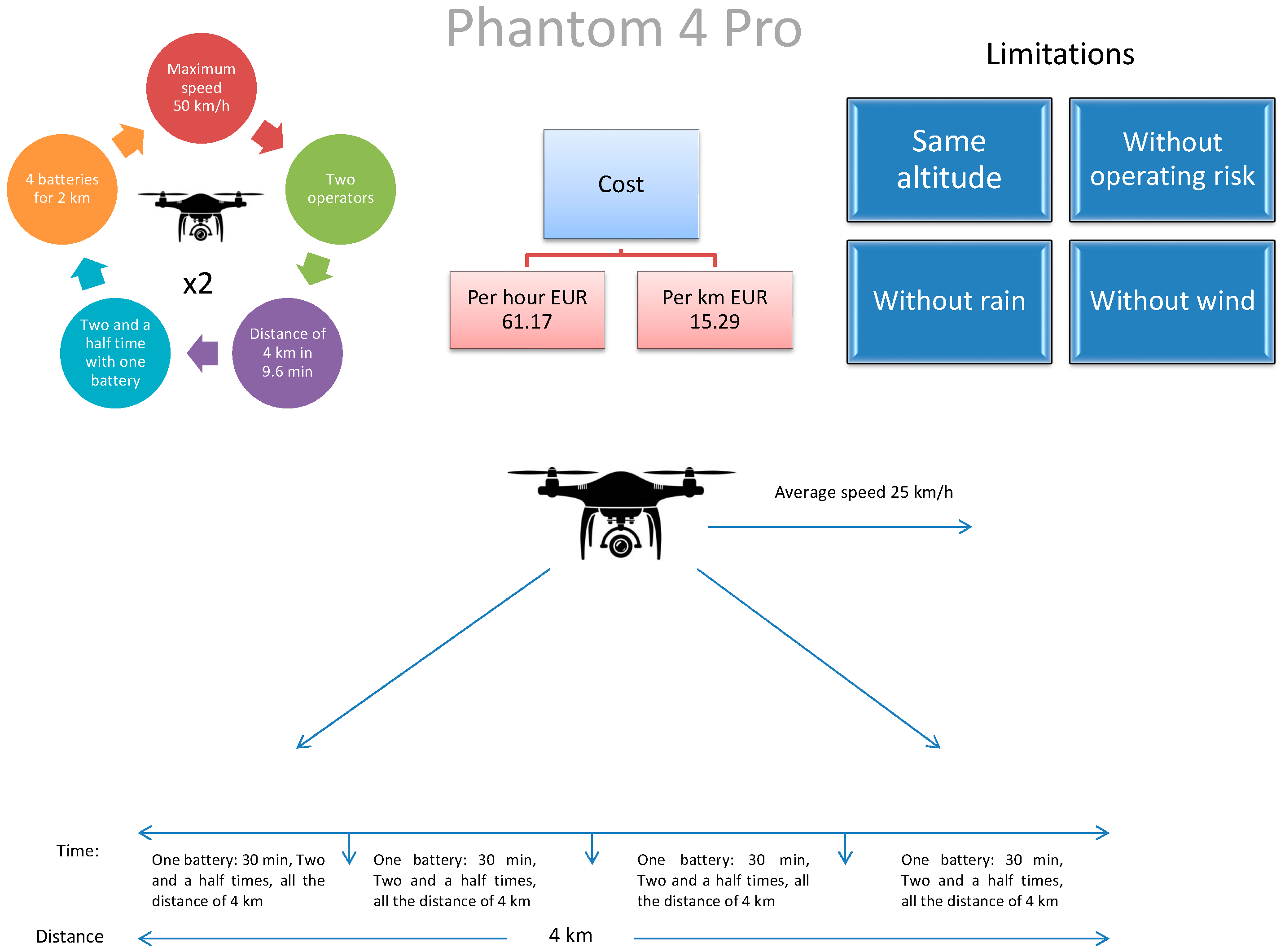
4.1.1. Cost Estimations for Phantom 4 Pro
4.1.2. Cost Estimation for Thunder-B
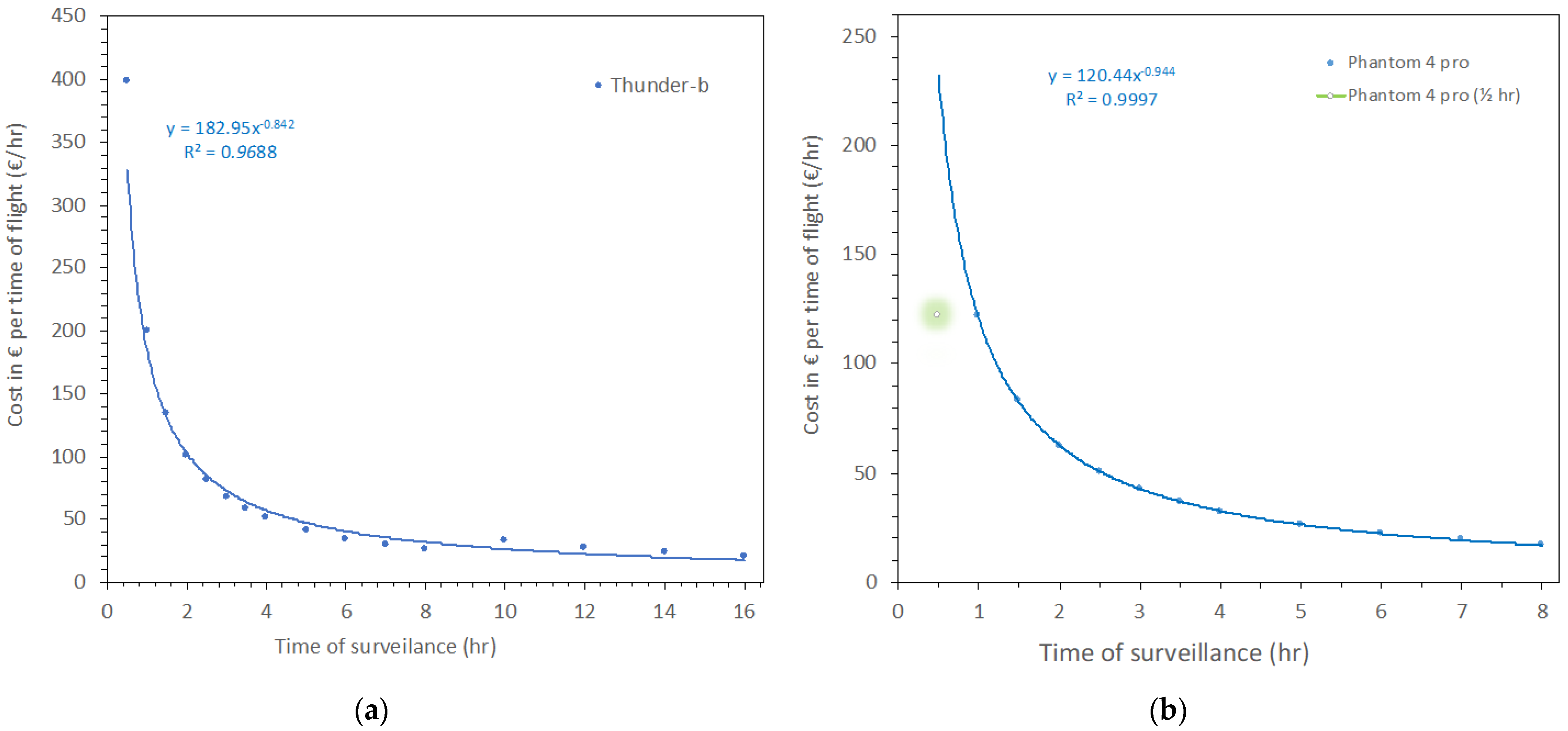
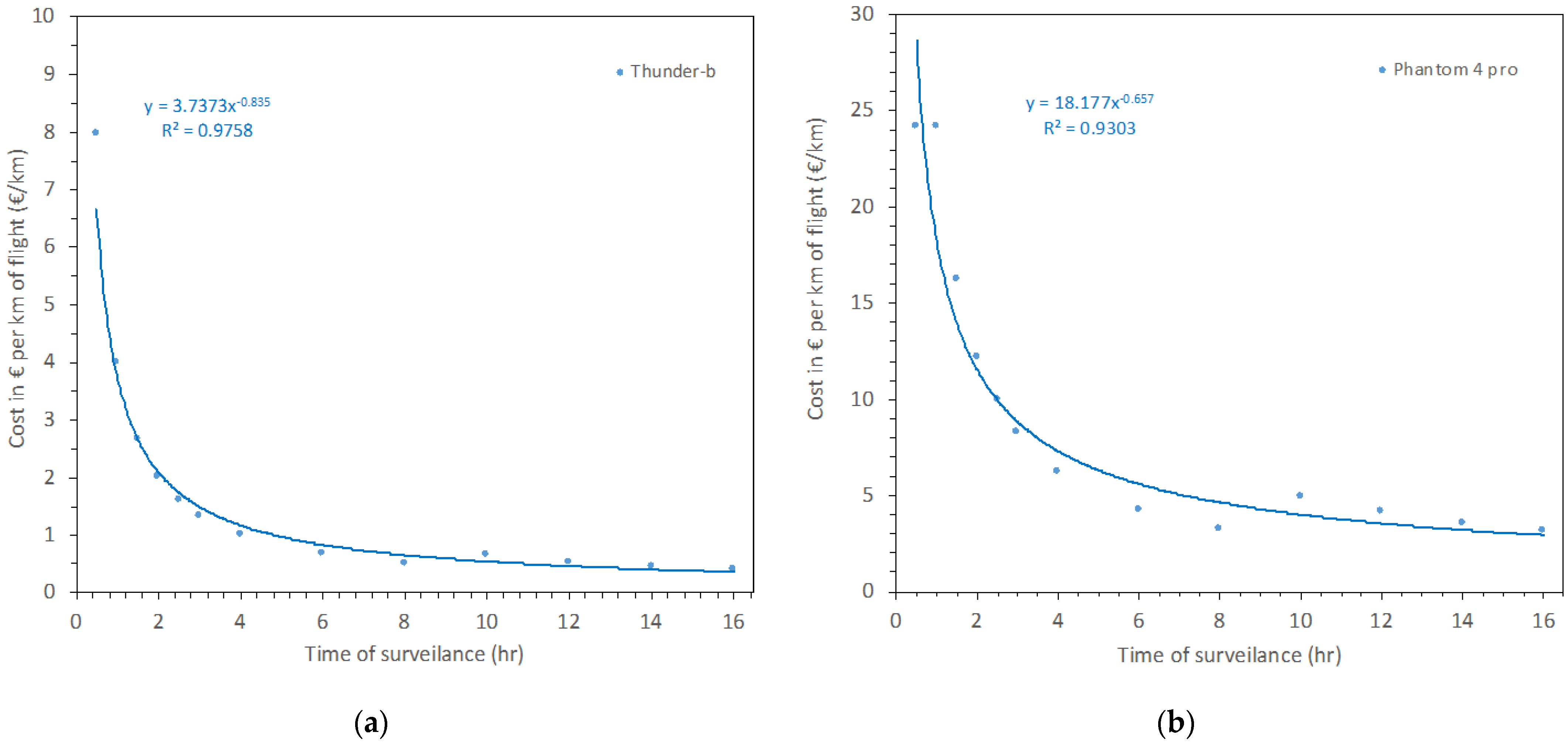
4.2. Cost Estimations per Flight Duration
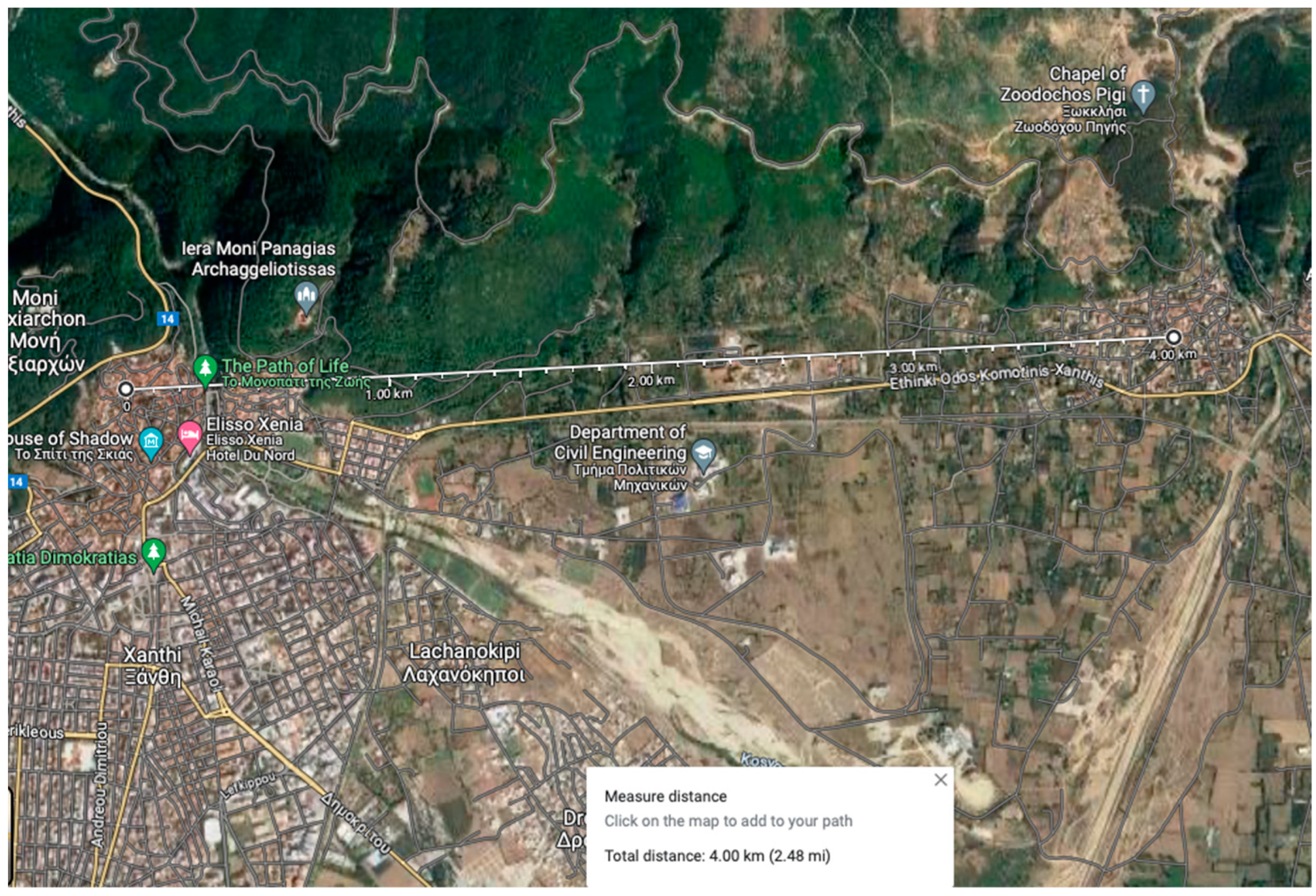
4.3. Case Study
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hours |  | 0.5 | 1 | 1.5 | 2 | 2.5 | 3 | 3.5 | 4 | 5 | 6 | 7 | 8 | 10 | 12 | 14 | 16 |
| Batteries per year |  | 2 | 2 | 3 | 4 | 8 | 8 | 8 | 8 | 12 | 12 | 16 | 16 | 20 | 24 | 28 | 32 |
| Drones |  | 1 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| Personnel |  | 1 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 4 | 4 | 4 | 4 |
| Camera |  | 1 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| Charger |  | 1 | 1 | 2 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 |
| Hours | |||||||||||||
| Units | | 0.5 | 1 | 1.5 | 2 | 2.5 | 3 | 4 | 8 | 10 | 12 | 14 | 16 |
| Fuel |  = 1 L = 1 L | 0.375 | 0.75 | 1.125 | 1.5 | 1.875 | 2.25 | 3 | 6 | 7.5 | 9 | 10.5 | 16.2 |
| Drone |  | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| Personnel |  | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 4 | 4 | 4 | 4 |
References
- Merz, M.; Pedro, D.; Skliros, V.; Bergenhem, C.; Himanka, M.; Houge, T.; Matos-Carvalho, J.P.; Lundkvist, H.; Cürüklü, B.; Hamrén, R.; et al. Autonomous UAS-Based Agriculture Applications: General Overview and Relevant European Case Studies. Drones 2022, 6, 128. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Saranya, C.; Pavithira, L.; Premsai, N.; Lavanya, H.; Govindarajan, R. Recent Trends of Drones in the Field of Defense. Int. J. Electr. Appl. 2015, 1, 47–55. [Google Scholar]
- Klemas, V.V. Coastal and Environmental Remote Sensing from Unmanned Aerial Vehicles: An Overview. J. Coast. Res. 2015, 31, 1260–1267. [Google Scholar] [CrossRef]
- Bossoukpe, M.; Faye, E.; Ndiaye, O.; Diatta, S.; Diatta, O.; Diouf, A.A.; Dendoncker, M.; Assouma, M.H.; Taugourdeau, S. Low-Cost Drones Help Measure Tree Characteristics in the Sahelian Savanna. J. Arid Environ. 2021, 187, 104449. [Google Scholar] [CrossRef]
- Manfreda, S.; McCabe, M.F.; Miller, P.E.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G. On the Use of Unmanned Aerial Systems for Environmental Monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef]
- Lloret, J.; Garcia, M.; Bri, D.; Sendra, S. A Wireless Sensor Network Deployment for Rural and Forest Fire Detection and Verification. Sensors 2009, 9, 8722–8747. [Google Scholar] [CrossRef]
- Lawlor, K.; Olander, L.; Boyd, W.; Niles, J.; Madeira, E. Addressing the Causes of Tropical Deforestation: Lessons Learned and the Implications for International Forest Carbon Policy; International Forest Carbon and the Climate Change Challenge Series—Brief Number 5 June; Nicholas Institute for Environmental Policy Solutions, Duke University: Durham, NC, USA, 2009. [Google Scholar]
- Balcerzak, A.T.; Jasiuk, B.E.; Fellner, C.A.; Feltynowski, D.M. The Polish Perspective of Using Unmanned Aerial Vehicle Systems in International Firefighting and Crisis Management Missions—Legal and Technological Analysis. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; pp. 1478–1487. [Google Scholar]
- Herwitz, S.R.; Johnson, L.F.; Dunagan, S.E.; Higgins, R.G.; Sullivan, D.V.; Zheng, J.; Lobitz, B.M.; Leung, J.G.; Gallmeyer, B.A.; Aoyagi, M.; et al. Imaging from an Unmanned Aerial Vehicle: Agricultural Surveillance and Decision Support. Comput. Electron. Agric. 2004, 44, 49–61. [Google Scholar] [CrossRef]
- Han, L.; Yang, G.; Yang, H.; Xu, B.; Li, Z.; Yang, X. Clustering Field-Based Maize Phenotyping of Plant-Height Growth and Canopy Spectral Dynamics Using a UAV Remote-Sensing Approach. Front. Plant Sci. 2018, 9, 1638. [Google Scholar] [CrossRef]
- Shafian, S.; Rajan, N.; Schnell, R.; Bagavathiannan, M.; Valasek, J.; Shi, Y.; Olsenholler, J. Unmanned Aerial Systems-Based Remote Sensing for Monitoring Sorghum Growth and Development. PLoS ONE 2018, 13, e0196605. [Google Scholar] [CrossRef]
- Ronchetti, G.; Mayer, A.; Facchi, A.; Ortuani, B.; Sona, G. Crop Row Detection through UAV Surveys to Optimize On-Farm Irrigation Management. Remote Sens. 2020, 12, 1967. [Google Scholar] [CrossRef]
- Mora, A.; Vemprala, S.; Carrio, A.; Saripalli, S. Flight Performance Assessment of Land Surveying Trajectories for Multiple UAV Platforms. In Proceedings of the 2015 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Cancun, Mexico, 23–25 November 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Albetis, J.; Jacquin, A.; Goulard, M.; Poilvé, H.; Rousseau, J.; Clenet, H.; Dedieu, G.; Duthoit, S. On the Potentiality of UAV Multispectral Imagery to Detect Flavescence Dorée and Grapevine Trunk Diseases. Remote Sens. 2019, 11, 23. [Google Scholar] [CrossRef]
- Riniatsih, I.; Ambariyanto, A.; Yudiati, E.; Redjeki, S.; Hartati, R. Monitoring the Seagrass Ecosystem Using the Unmanned Aerial Vehicle (UAV) in Coastal Water of Jepara. Proc. IOP Conf. Ser. Earth Environ. Sci. 2021, 674, 012075. [Google Scholar] [CrossRef]
- Półka, M.; Ptak, S.; Kuziora, Ł. The Use of UAV’s for Search and Rescue Operations. Procedia Eng. 2017, 192, 748–752. [Google Scholar] [CrossRef]
- Griffin, G.F. The Use of Unmanned Aerial Vehicles for Disaster Management. Geomatica 2014, 68, 265–281. [Google Scholar] [CrossRef]
- Zulkipli, M.A.; Tahar, K.N. Multirotor UAV-Based Photogrammetric Mapping for Road Design. Int. J. Opt. 2018, 2018, 1871058. [Google Scholar] [CrossRef]
- Koeva, M.; Muneza, M.; Gevaert, C.; Gerke, M.; Nex, F. Using UAVs for Map Creation and Updating. A Case Study in Rwanda. Surv. Rev. 2018, 50, 312–325. [Google Scholar] [CrossRef]
- Giordan, D.; Adams, M.S.; Aicardi, I.; Alicandro, M.; Allasia, P.; Baldo, M.; De Berardinis, P.; Dominici, D.; Godone, D.; Hobbs, P.; et al. The Use of Unmanned Aerial Vehicles (UAVs) for Engineering Geology Applications. Bull. Eng. Geol. Environ. 2020, 79, 3437–3481. [Google Scholar] [CrossRef]
- Smith, S.L. Drones over the “Black Desert”: The Advantages of Rotary-Wing UAVs for Complementing Archaeological Fieldwork in the Hard-to-Access Landscapes of Preservation of North-Eastern Jordan. Geosciences 2020, 10, 426. [Google Scholar] [CrossRef]
- Leuenberger, D.; Haefele, A.; Omanovic, N.; Fengler, M.; Martucci, G.; Calpini, B.; Fuhrer, O.; Rossa, A. Improving High-Impact Numerical Weather Prediction with Lidar and Drone Observations. Bull. Am. Meteorol. Soc. 2020, 101, E1036–E1051. [Google Scholar] [CrossRef]
- Stanton, M.C.; Kalonde, P.; Zembere, K.; Hoek Spaans, R.; Jones, C.M. The Application of Drones for Mosquito Larval Habitat Identification in Rural Environments: A Practical Approach for Malaria Control? Malar. J. 2021, 20, 244. [Google Scholar] [CrossRef] [PubMed]
- Kunovjanek, M.; Wankmüller, C. Containing the COVID-19 Pandemic with Drones—Feasibility of a Drone Enabled Back-up Transport System. Transp. Policy 2021, 106, 141–152. [Google Scholar] [CrossRef] [PubMed]
- Massarelli, C.; Muolo, M.R.; Uricchio, V.F.; Dongiovanni, N.; Palumbo, R. Improving Environmental Monitoring against the Risk from Uncontrolled Abandonment of Waste Containing Asbestos. The DroMEP Project. Geomatics Workbooks n° 12—“FOSS4G Europe Como 2015”. Available online: https://www.researchgate.net/profile/Carmine-Massarelli/publication/281811563_Improving_environmental_monitoring_against_the_risk_from_uncontrolled_abandonment_of_waste_containing_asbestos_The_DroMEP_project/links/6124d74b0c2bfa282a6707c4/Improving-environmental-monitoring-against-the-risk-from-uncontrolled-abandonment-of-waste-containing-asbestos-The-DroMEP-project.pdf (accessed on 17 September 2023).
- Cheteni, P. An Analysis of Anti-Poaching Techniques in Africa: A Case of Rhino Poaching. Environ. Econ. 2014, 5, 63–70. [Google Scholar]
- Boakye, J. Enforcement of Logging Regulations in Ghana: Perspectives of Frontline Regulatory Officers. For. Policy Econ. 2020, 115, 102138. [Google Scholar] [CrossRef]
- Zhou, F.; Pan, S.; Chen, W.; Ni, X.; An, B. Monitoring of Compliance with Fuel Sulfur Content Regulations through Unmanned Aerial Vehicle (UAV) Measurements of Ship Emissions. Atmos. Meas. Tech. 2019, 12, 6113–6124. [Google Scholar] [CrossRef]
- Golcarenarenji, G.; Martinez-Alpiste, I.; Wang, Q.; Alcaraz-Calero, J.M. Efficient Real-Time Human Detection Using Unmanned Aerial Vehicles Optical Imagery. Int. J. Remote Sens. 2021, 42, 2440–2462. [Google Scholar] [CrossRef]
- Rosenfeld, A. Are Drivers Ready for Traffic Enforcement Drones? Accid. Anal. Prev. 2019, 122, 199–206. [Google Scholar] [CrossRef]
- Marin, L.; Krajčíková, K. Deploying Drones in Policing Southern European Borders: Constraints and Challenges for Data Protection and Human Rights. In Drones and Unmanned Aerial Systems; Springer: Berlin/Heidelberg, Germany, 2016; pp. 101–127. [Google Scholar]
- Daniels, J. (Doug) Drones for Police, Fire & Other Emergency Responders Senior Law Enforcement Training Officer Remote Pilot-In-Command Ohio Peace Officer Training Academy Direct Line: (740) 845-6304. Available online: https://ceas.uc.edu/content/dam/aero/docs/fire/DRONES%20FOR%20POLICE%2C%20FIRE%20%26%20OTHER%20EMERGENCY.pdf (accessed on 30 May 2021).
- Police Using Scentroid’s Drone Environmental Monitoring to Combat Smog. Canada, 22 February 2018. Available online: https://scentroid.com/police-using-scentroid-dr1000-flying-lab-to-combat-smog/ (accessed on 4 February 2021).
- Pyzynski, M. Cybersecurity of the Unmanned Aircraft System (UAS). In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 1265–1269. [Google Scholar]
- Bassi, E. From Here to 2023: Civil Drones Operations and the Setting of New Legal Rules for the European Single Sky. J. Intell. Robot. Syst. 2020, 100, 493–503. [Google Scholar] [CrossRef]
- Konert, A.; Dunin, T. A Harmonized European Drone Market?—New EU Rules on Unmanned Aircraft Systems. Adv. Sci. Technol. Eng. Syst. J. 2020, 5, 93–99. [Google Scholar] [CrossRef]
- ΕΛΙΣΜΕ ΓΕΕΘA 20181127 1.2 Δημήτριος Γκριτζάπης «Επιχειρησιακή Δράση ΣμηΕA Στην ΕΛ.AΣ.». Available online: https://www.slideshare.net/helissme/20181127-12 (accessed on 4 February 2021).
- Tα Hλεκτρονικά “Γεράκια” Της ΕΛ.AΣ. Available online: https://www.zougla.gr/greece/article/i-enaeri-filakes-kata-tou-eglimatos (accessed on 5 February 2021).
- Tsiamis, N.; Efthymiou, L.; Tsagarakis, K.P. A Comparative Analysis of the Legislation Evolution for Drone Use in OECD Countries. Drones 2019, 3, 75. [Google Scholar] [CrossRef]
- Sudbury, A.W.; Hutchinson, E.B. A Cost Analysis of Amazon Prime Air (Drone Delivery). J. Econ. Educ. 2016, 16, 1–12. [Google Scholar]
- Wright, C.; Rupani, S.; Nichols, K.; Yasmin, C.; Matiko, M. What Should You Deliver by Unmanned Aerial Systems? JSI Research & Training Institute, Inc.: Arlington, VA, USA, 2018. [Google Scholar]
- Ochieng, W.O.; Ye, T.; Scheel, C.; Lor, A.; Saindon, J.; Yee, S.L.; Meltzer, M.I.; Kapil, V.; Karem, K. Uncrewed Aircraft Systems versus Motorcycles to Deliver Laboratory Samples in West Africa: A Comparative Economic Study. Lancet Glob. Health 2020, 8, e143–e151. [Google Scholar] [CrossRef] [PubMed]
- Meier, P.; Bergelund, J. Field-Testing the First Cargo Drone Deliveries in the Amazon Rainforest; WeRobotics: Geneva, Switzerland, 2017. [Google Scholar]
- Sozzi, M.; Kayad, A.; Gobbo, S.; Cogato, A.; Sartori, L.; Marinello, F. Economic Comparison of Satellite, Plane and UAV-Acquired NDVI Images for Site-Specific Nitrogen Application: Observations from Italy. Agronomy 2021, 11, 2098. [Google Scholar] [CrossRef]
- Yowtak, K.; Imiola, J.; Andrews, M.; Cardillo, K.; Skerlos, S. Comparative Life Cycle Assessment of Unmanned Aerial Vehicles, Internal Combustion Engine Vehicles and Battery Electric Vehicles for Grocery Delivery. Procedia CIRP 2020, 90, 244–250. [Google Scholar] [CrossRef]
- Christensen, B.R. Use of UAV or Remotely Piloted Aircraft and Forward-Looking Infrared in Forest, Rural and Wildland Fire Management: Evaluation Using Simple Economic Analysis. N. Z. J. For. Sci. 2015, 45, 16. [Google Scholar] [CrossRef]
- Zailani, M.A.; Azma, R.Z.; Aniza, I.; Rahana, A.R.; Ismail, M.S.; Shahnaz, I.S.; Chan, K.S.; Jamaludin, M.; Mahdy, Z.A. Drone versus Ambulance for Blood Products Transportation: An Economic Evaluation Study. BMC Health Serv. Res. 2021, 21, 1308. [Google Scholar] [CrossRef]
- Borghetti, F.; Caballini, C.; Carboni, A.; Grossato, G.; Maja, R.; Barabino, B. The Use of Drones for Last-Mile Delivery: A Numerical Case Study in Milan, Italy. Sustainability 2022, 14, 1766. [Google Scholar] [CrossRef]
- White, S.M.; Schaefer, M.; Barfield, P.; Cantrell, R.; Watson, G.J. Cost Benefit Analysis of Survey Methods for Assessing Intertidal Sediment Disturbance: A Bait Collection Case Study. J. Environ. Manag. 2022, 306, 114386. [Google Scholar] [CrossRef]
- Valerdi, R. Cost Metrics for Unmanned Aerial Vehicles. In Infotech@ Aerospace; Massachusetts Institute of Technology: Cambridge, MA, USA, 2005; p. 7102. [Google Scholar]
- Malone, P.; Apgar, H.; Stukes, S.; Sterk, S. Unmanned Aerial Vehicles Unique Cost Estimating Requirements. In Proceedings of the 2013 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–8. [Google Scholar]
- Banazadeh, A.; Jafari, M.H. A Heuristic Complexity-Based Method for Cost Estimation of Aerospace Systems. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2013, 227, 1685–1700. [Google Scholar] [CrossRef]
- DJI Phantom 4 Pro. Available online: https://www.dji.com/gr/phantom-4-pro/info#specs (accessed on 20 February 2021).
- What’s the Best Battery? Available online: https://batteryuniversity.com/article/whats-the-best-battery (accessed on 20 March 2021).
- Aνάλυση Του Μισθολόγιου Των Aστυνομικών. Available online: http://policenet.gr/article/%CE%B1%CE%BD%CE%AC%CE%BB%CF%85%CF%83%CE%B7-%CF%84%CE%BF%CF%85-%CE%BC%CE%B9%CF%83%CE%B8%CE%BF%CE%BB%CF%8C%CE%B3%CE%B9%CE%BF%CF%85-%CF%84%CF%89%CE%BD-%CE%B1%CF%83%CF%84%CF%85%CE%BD%CE%BF%CE%BC%CE%B9%CE%BA%CF%8E%CE%BD (accessed on 3 March 2021).
- Υπολογισμός Κόστους Hλεκτρικές Ενέργειας Για Κάθε Oικιακή Συσκευή. Available online: https://www.helppost.gr/dei/ypologismos-reuma-katanalosi/ (accessed on 25 March 2021).






| UAV Characteristics | Phantom 4 Pro | Thunder-B |
|---|---|---|
| Wingspan | 350 mm | 4 m |
| Weight | 1.375 kg | 32 kg |
| Maximum speed | S-mode: 45 mph (72 kph) P-mode: 31 mph (50 kph) | 137 kph Cruise speed 80 kph |
| Flight range | 5 km | 150 km |
| Endurance | 30 min | up to 24 h/12 h with cargo capsules/vtol |
| Operating altitude | 1820 m/6000 ft | |
| Maximum altitude | 19,685 ft/6000 m | 4870 m/16,000 ft |
| Temperature range | 0–40 °C | |
| Covert operation | Aprox. 500 m | |
| Cost | EUR 1699 | EUR 100,000–200,000 |
| Fuel source | - | 12 lt |
| Payload | up to 4 kg | |
| Wind speed resistance | 10 m/s | |
| Airspeed | 10 m/s | 60–137 kmh/32–72 knots |
| Battery | 6000 mAh LiPo | - |
| Severe weather operation | Without rain and in winds of up to 10 m/s | In winds of up to 45 knots and rain of up to 10 mm/h |
| Units | Phantom 4 Pro | Thunder-B |
|---|---|---|
| Drones (no) | | |
| Camera (no) | | |
| Personnel (no) | | |
| Fuel (L) | N/A | |
| Batteries (no) |  | N/A |
| Charger (no) | | N/A |
| Costs | Units | Cost per Unit (EUR) | Cost (EUR) | t (yr) | CRF | Annual Cost (EUR) |
|---|---|---|---|---|---|---|
| Vehicle | 2 | 1699 | 3398 | 5 | 0.231 | 784.85 |
| Thermal camera | 2 | 2149 | 4298 | 5 | 0.231 | 992.73 |
| Battery | 8 | 189 | 1512 | 1 | 1.050 | 1587.60 |
| Charger | 3 | 99 | 297 | 5 | 0.231 | 68.60 |
| Sum of capital | 3433.78 | |||||
| Basic service | 338 | |||||
| Energy | 39.42 | |||||
| Operator | 41,640 | |||||
| Sum of O&M | 42,017.42 | |||||
| TAEC | 45,451.20 |
| Costs | Units | Cost per Unit (EUR) | Cost (EUR) | t (yr) | CRF | Annual Cost (EUR) |
|---|---|---|---|---|---|---|
| Vehicle | 1 | 200,000 | 200,000 | 10 | 0.1295 | 25,900.91 |
| SUM | 25,900.91 | |||||
| O&M | ||||||
| Basic service | 5000 | |||||
| Fuels | 1724.63 | |||||
| Operator | 41,640 | |||||
| SUM | 48,364.63 | |||||
| TAEC | 74,265.54 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsiamis, N.; Efthymiou, L.; Tsagarakis, K.P. A Conceptual Framework for Economic Analysis of Different Law Enforcement Drones. Machines 2023, 11, 983. https://doi.org/10.3390/machines11110983
Tsiamis N, Efthymiou L, Tsagarakis KP. A Conceptual Framework for Economic Analysis of Different Law Enforcement Drones. Machines. 2023; 11(11):983. https://doi.org/10.3390/machines11110983
Chicago/Turabian StyleTsiamis, Nikolaos, Loukia Efthymiou, and Konstantinos P. Tsagarakis. 2023. "A Conceptual Framework for Economic Analysis of Different Law Enforcement Drones" Machines 11, no. 11: 983. https://doi.org/10.3390/machines11110983