
Waypoint Generation in Satellite Images Based on a CNN for Outdoor UGV Navigation

Abstract
:1. Introduction
- A CNN has been trained with automatically labelled synthetic data to extract possible paths on natural terrain from a satellite image.
- Geo-referenced waypoints along the detected path from the current UGV location are directly generated from the binarised image.
2. Image Segmentation
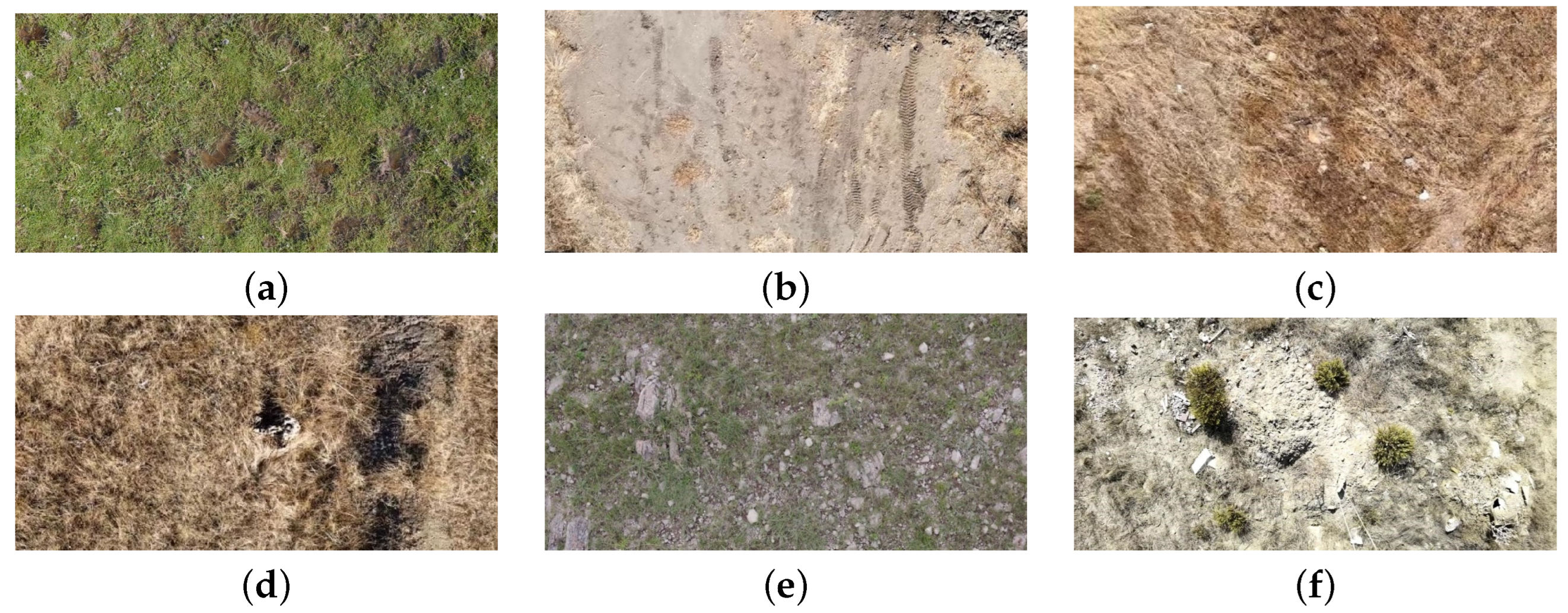
2.1. Natural Environment Modelling
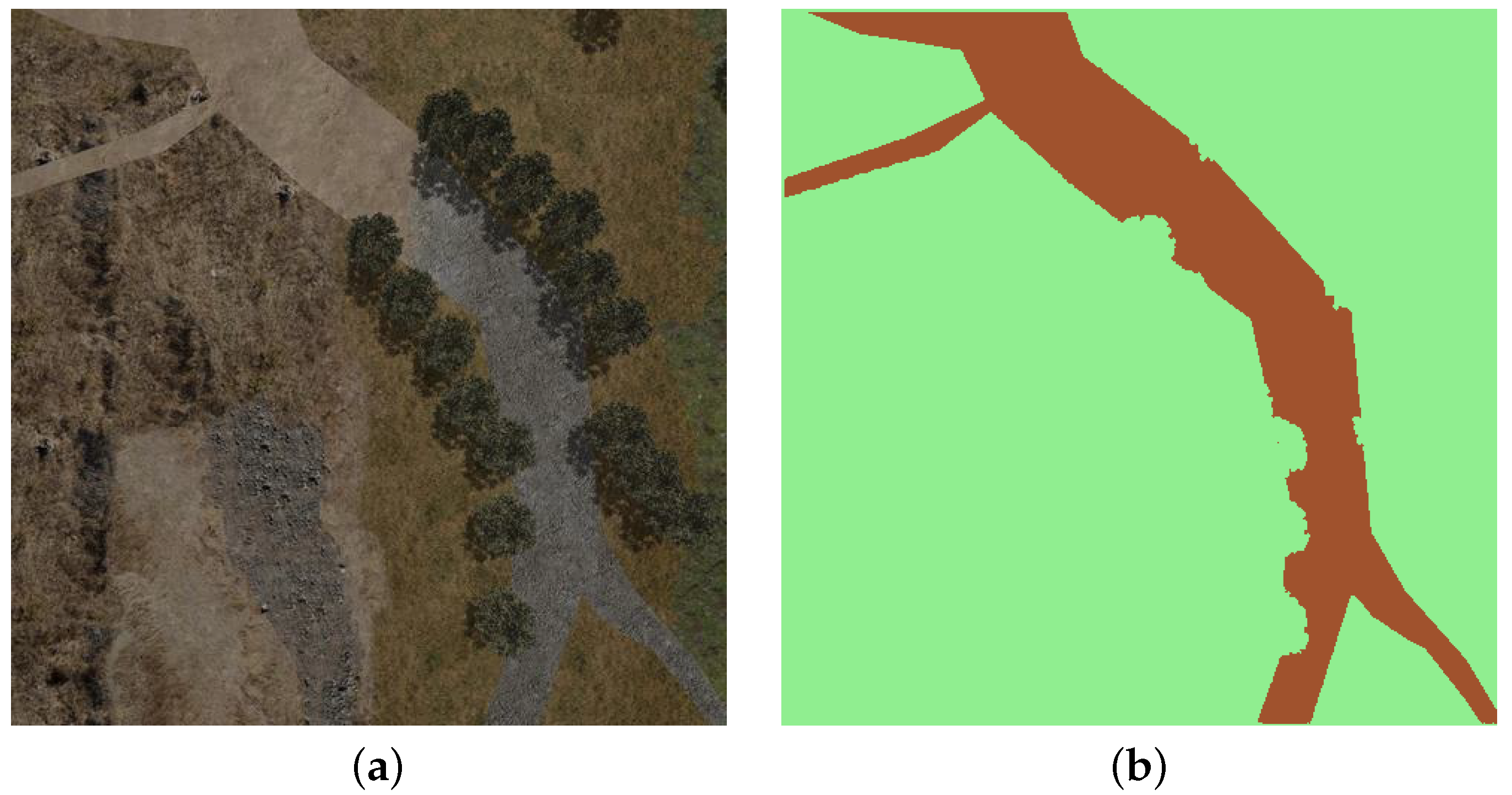
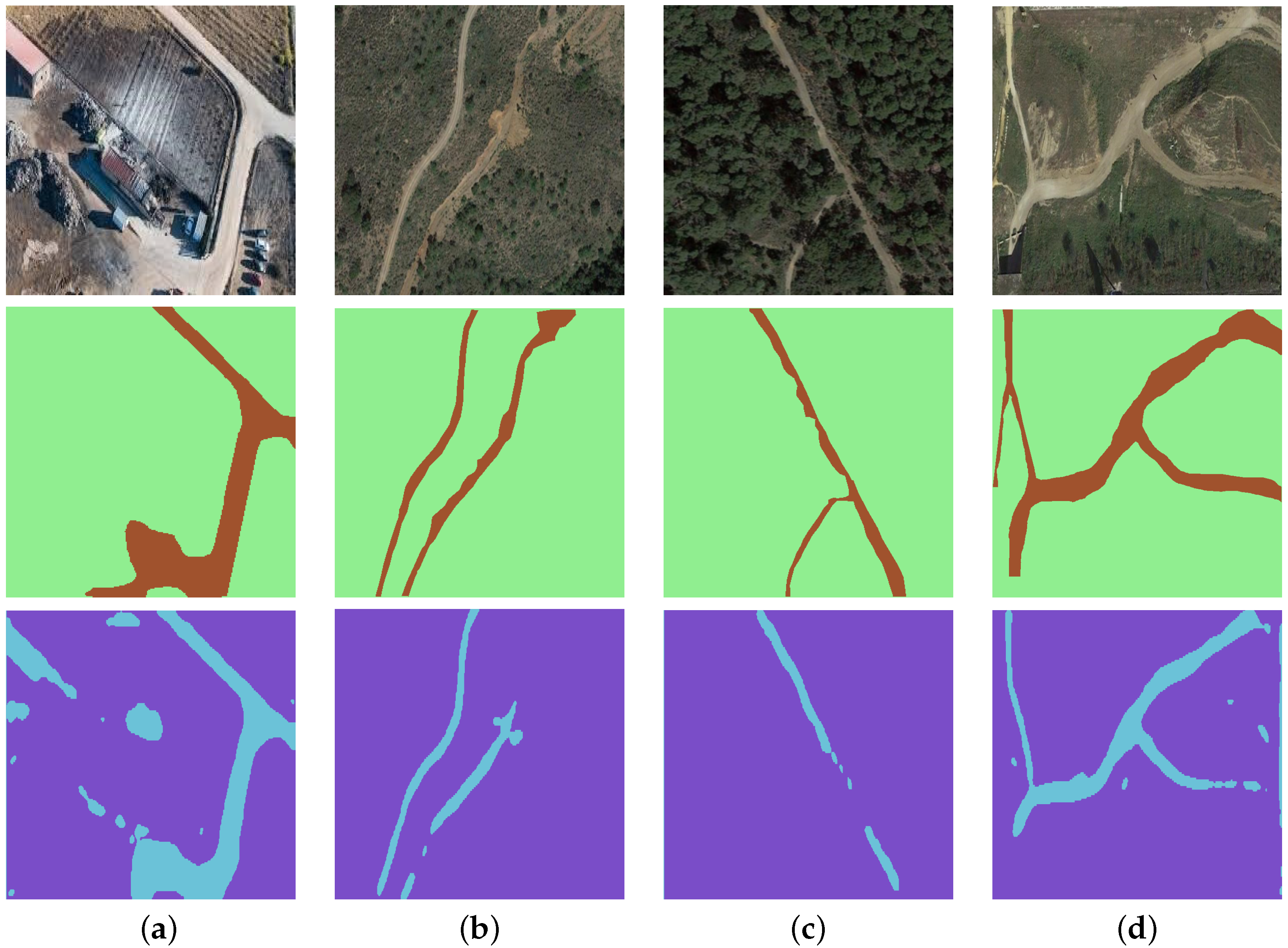
2.2. Annotated Aerial Images
2.3. The ResNet-50 CNN
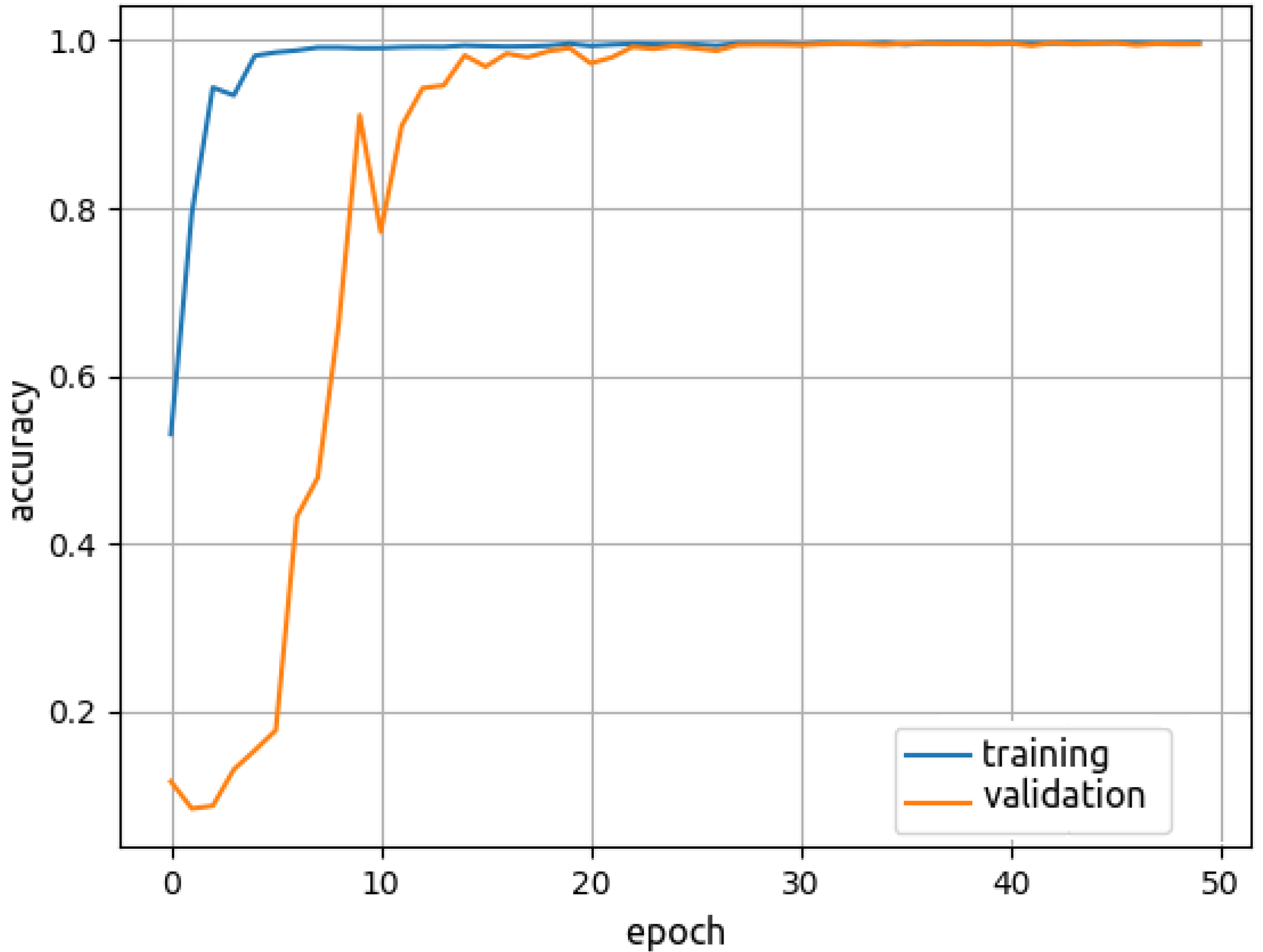
2.4. Validation
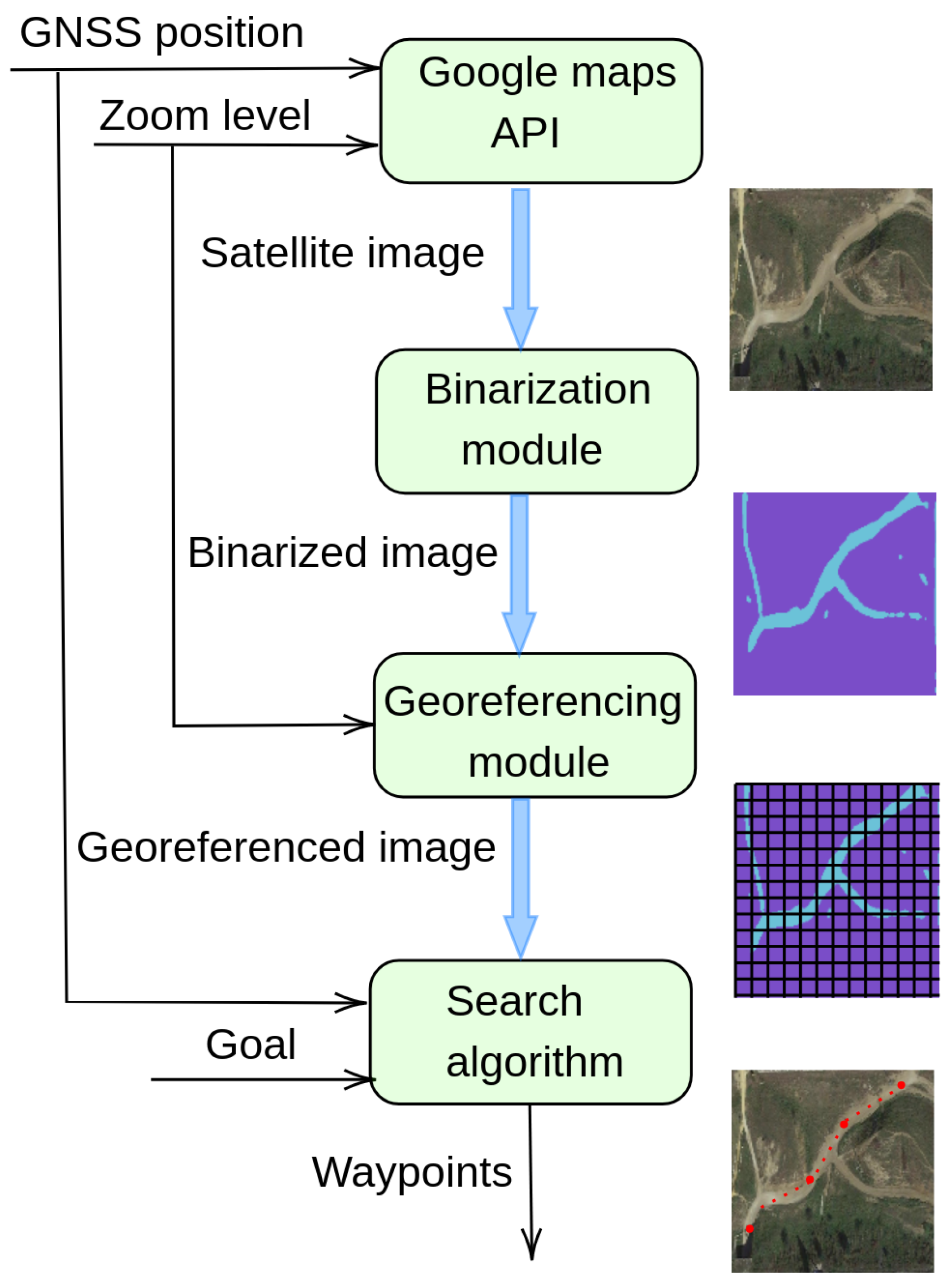
3. Waypoint Generation
3.1. Pixel Geo-Referencing
3.2. Pixel Route
3.3. Developed GUI
- “Get Map” to obtain a satellite view centred on the current UGV position.
- “Binarise” to segment the image using the trained CNN.
- “Global Plan” to calculate waypoints to the selected goal.
- “Toggle View” to alternate between the satellite view and the binarized one.
- “Quit” to abandon the application.
4. Experimental Results
4.1. Generating Waypoints
4.2. Outdoor Navigation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| 2D | Two-Dimensional |
| 3D | Three-Dimensional |
| CNN | Convolutional Neural Network |
| FN | False Negative |
| FP | False Positive |
| GNSS | Global Navigation Satellite System |
| GUI | Graphical User Interface |
| ID | Identity |
| IMU | Inertial Measurement Unit |
| LiDAR | Light Detection And Ranging |
| RE | Recall |
| RELU | REctified Linear Unit |
| ResNet | RESidual Neural NETwork |
| ROS | Robot Operating System |
| SP | Specificity |
| TN | True Negative |
| TP | True Positive |
| UAV | Unmanned Aerial Vehicle |
| UGV | Unmanned Ground Vehicle |
| UTM | Universal Transverse Mercator |
References
- Sánchez-Ibáñez, J.R.; Pérez-del Pulgar, C.J.; García-Cerezo, A. Path Planning for Autonomous Mobile Robots: A Review. Sensors 2021, 21, 7898. [Google Scholar] [CrossRef]
- Hua, C.; Niu, R.; Yu, B.; Zheng, X.; Bai, R.; Zhang, S. A Global Path Planning Method for Unmanned Ground Vehicles in Off-Road Environments Based on Mobility Prediction. Machines 2022, 10, 375. [Google Scholar] [CrossRef]
- Toscano-Moreno, M.; Mandow, A.; Martínez, M.A.; García-Cerezo, A. DEM-AIA: Asymmetric inclination-aware trajectory planner for off-road vehicles with digital elevation models. Eng. Appl. Artif. Intell. 2023, 121, 105976. [Google Scholar] [CrossRef]
- Vandapel, N.; Donamukkala, R.R.; Hebert, M. Unmanned Ground Vehicle Navigation Using Aerial Ladar Data. Int. J. Robot. Res. 2006, 25, 31–51. [Google Scholar] [CrossRef] [Green Version]
- Delmerico, J.; Mueggler, E.; Nitsch, J.; Scaramuzza, D. Active Autonomous Aerial Exploration for Ground Robot Path Planning. IEEE Robot. Autom. Lett. 2017, 2, 664–671. [Google Scholar] [CrossRef] [Green Version]
- Silver, D.; Sofman, B.; Vandapel, N.; Bagnell, J.A.; Stentz, A. Experimental Analysis of Overhead Data Processing To Support Long Range Navigation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 2443–2450. [Google Scholar] [CrossRef] [Green Version]
- Bodur, M.; Mehrolhassani, M. Satellite Images-Based Obstacle Recognition and Trajectory Generation for Agricultural Vehicles. Int. J. Adv. Robot. Syst. 2015, 12, 188. [Google Scholar] [CrossRef]
- Thrun, S.; Montemerlo, M.; Dahlkamp, H.; Stavens, D.; Aron, A.; Diebel, J.; Fong, P.; Gale, J.; Halpenny, M.; Hoffmann, G.; et al. Stanley: The robot that won the DARPA Grand Challenge. J. Field Robot. 2006, 23, 661–692. [Google Scholar] [CrossRef]
- Giusti, A.; Guzzi, J.; Ciresan, D.; He, F.L.; Rodriguez, J.; Fontana, F.; Faessler, M.; Forster, C.; Schmidhuber, J.; Caro, G.; et al. A Machine Learning Approach to Visual Perception of Forest Trails for Mobile Robots. IEEE Robot. Autom. Lett. 2016, 1, 661–667. [Google Scholar] [CrossRef] [Green Version]
- Santos, L.C.; Aguiar, A.S.; Santos, F.N.; Valente, A.; Petry, M. Occupancy Grid and Topological Maps Extraction from Satellite Images for Path Planning in Agricultural Robots. Robotics 2020, 9, 77. [Google Scholar] [CrossRef]
- Christie, G.; Shoemaker, A.; Kochersberger, K.; Tokekar, P.; McLean, L.; Leonessa, A. Radiation search operations using scene understanding with autonomous UAV and UGV. J. Field Robot. 2017, 34, 1450–1468. [Google Scholar] [CrossRef] [Green Version]
- Meiling, W.; Huachao, Y.; Guoqiang, F.; Yi, Y.; Yafeng, L.; Tong, L. UAV-aided Large-scale Map Building and Road Extraction for UGV. In Proceedings of the IEEE 7th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems, (CYBER), Honolulu, HI, USA, 31 July–4 August 2018; pp. 1208–1213. [Google Scholar] [CrossRef]
- Peterson, J.; Chaudhry, H.; Abdelatty, K.; Bird, J.; Kochersberger, K. Online Aerial Terrain Mapping for Ground Robot Navigation. Sensors 2018, 18, 630. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Montoya-Zegarra, J.A.; Wegner, J.D.; Ladický, L.; Schindler, K. Semantic Segmentation of Aerial Images in Urban Areas with Class-Specific Higher-Order Cliques. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, II-3/W4, 127–133. [Google Scholar] [CrossRef] [Green Version]
- Wang, M.; Chu, A.; Bush, L.; Williams, B. Active detection of drivable surfaces in support of robotic disaster relief missions. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2013. [Google Scholar] [CrossRef]
- Hudjakov, R.; Tamre, M. Aerial imagery terrain classification for long-range autonomous navigation. In Proceedings of the International Symposium on Optomechatronic Technologies (ISOT), Istanbul, Turkey, 21–23 September 2009; pp. 88–91. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. In Advances in Neural Information Processing Systems; Pereira, F., Burges, C., Bottou, L., Weinberger, K., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2012; Volume 25. [Google Scholar]
- Sermanet, P.; Eigen, D.; Zhang, X.; Mathieu, M.; Fergus, R.; LeCun, Y. Overfeat: Integrated recognition, localization and detection using convolutional networks. In Proceedings of the 2nd International Conference on Learning Representations (ICLR), Banff, AB, Canada, 14–16 April 2014. [Google Scholar]
- Delmerico, J.; Giusti, A.; Mueggler, E.; Gambardella, L.M.; Scaramuzza, D. “On-the-Spot Training” for Terrain Classification in Autonomous Air-Ground Collaborative Teams. In Proceedings of the 2016 International Symposium on Experimental Robotics, Nagasaki, Japan, 3–8 October 2016; Kulić, D., Nakamura, Y., Khatib, O., Venture, G., Eds.; Springer: Berlin/Heidelberg, Germany, 2017; pp. 574–585. [Google Scholar] [CrossRef]
- Ding, L.; Tang, H.; Bruzzone, L. LANet: Local Attention Embedding to Improve the Semantic Segmentation of Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2021, 59, 426–435. [Google Scholar] [CrossRef]
- Máttyus, G.; Luo, W.; Urtasun, R. DeepRoadMapper: Extracting Road Topology from Aerial Images. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 3458–3466. [Google Scholar] [CrossRef]
- Chen, K.; Fu, K.; Yan, M.; Gao, X.; Sun, X.; Wei, X. Semantic Segmentation of Aerial Images With Shuffling Convolutional Neural Networks. IEEE Geosci. Remote Sens. Lett. 2018, 15, 173–177. [Google Scholar] [CrossRef]
- Martínez, J.L.; Morán, M.; Morales, J.; Robles, A.; Sánchez, M. Supervised Learning of Natural-Terrain Traversability with Synthetic 3D Laser Scans. Appl. Sci. 2020, 10, 1140. [Google Scholar] [CrossRef] [Green Version]
- Nikolenko, S. Synthetic Simulated Environments. In Synthetic Data for Deep Learning; Springer Optimization and Its Applications; Springer: Berlin/Heidelberg, Germany, 2021; Volume 174, Chapter 7; pp. 195–215. [Google Scholar] [CrossRef]
- Sánchez, M.; Morales, J.; Martínez, J.L.; Fernández-Lozano, J.J.; García-Cerezo, A. Automatically Annotated Dataset of a Ground Mobile Robot in Natural Environments via Gazebo Simulations. Sensors 2022, 22, 5599. [Google Scholar] [CrossRef] [PubMed]
- Koenig, K.; Howard, A. Design and Use Paradigms for Gazebo, an Open-Source Multi-Robot Simulator. In Proceedings of the IEEE-RSJ International Conference on Intelligent Robots and Systems, Sendai, Japan, 28 September–2 October 2004; pp. 2149–2154. [Google Scholar] [CrossRef] [Green Version]
- Agüero, C.E.; Koenig, N.; Chen, I.; Boyer, H.; Peters, S.; Hsu, J.; Gerkey, B.; Paepcke, S.; Rivero, J.L.; Manzo, J.; et al. Inside the Virtual Robotics Challenge: Simulating Real-Time Robotic Disaster Response. IEEE Trans. Autom. Sci. Eng. 2015, 12, 494–506. [Google Scholar] [CrossRef]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A. ROS: An open-source Robot Operating System. In Proceedings of the IEEE ICRA Workshop on Open Source Software, Kobe, Japan, 12 May 2009; Volume 3, pp. 1–6. [Google Scholar]
- Bechtsis, D.; Moisiadis, V.; Tsolakis, N.; Vlachos, D.; Bochtis, D. Unmanned Ground Vehicles in Precision Farming Services: An Integrated Emulation Modelling Approach. In Information and Communication Technologies in Modern Agricultural Development; Springer: Berlin/Heidelberg, Germany, 2019; Volume 953, pp. 177–190. [Google Scholar] [CrossRef]
- Murphy, K.P. Probabilistic Machine Learning: An Introduction; MIT Press: Cambridge, MA, USA, 2022. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef] [Green Version]
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M.; et al. TensorFlow: Large-Scale Machine Learning on Heterogeneous Systems. In Proceedings of the 12th USENIX Symposium on Operating Systems Design and Implementation (OSDI), Savannah, GA, USA, 2–4 November 2016. [Google Scholar]
- Gulli, A.; Pal, S. Deep Learning with Keras; Packt Publishing Ltd.: Birmingham, UK, 2017. [Google Scholar]
- Gupta, D. A Beginner’s Guide to Deep Learning Based Semantic Segmentation Using Keras. 2019. Available online: https://divamgupta.com/image-segmentation/2019/06/06/deep-learning-semantic-segmentation-keras.html (accessed on 20 June 2023).
- Foead, D.; Ghifari, A.; Kusuma, M.; Hanafiah, N.; Gunawan, E. A Systematic Literature Review of A* Pathfinding. Procedia Comput. Sci. 2021, 179, 507–514. [Google Scholar] [CrossRef]
- Sánchez, M.; Morales, J.; Martínez, J.L. Reinforcement and Curriculum Learning for Off-Road Navigation of an UGV with a 3D LiDAR. Sensors 2023, 23, 3239. [Google Scholar] [CrossRef] [PubMed]
- Martínez, J.L.; Morales, J.; Reina, A.; Mandow, A.; Pequeño Boter, A.; García-Cerezo, A. Construction and calibration of a low-cost 3D laser scanner with 360o field of view for mobile robots. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 149–154. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Synthetic Data | Real Data |
|---|---|---|
| True Positive (TP) | 105,141 | 64,608 |
| True Negative (TN) | 800,324 | 813,920 |
| False Positive (FP) | 2434 | 18,497 |
| False Negative (FN) | 13,701 | 24,575 |
| Metric | Formula | Synthetic Data | Real Data |
|---|---|---|---|
| Precision | 0.9824 | 0.9533 | |
| Recall (RE) | 0.8847 | 0.7244 | |
| Specificity (SP) | 0.9969 | 0.9778 | |
| Balanced Accuracy | 0.9408 | 0.8511 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sánchez, M.; Morales, J.; Martínez, J.L. Waypoint Generation in Satellite Images Based on a CNN for Outdoor UGV Navigation. Machines 2023, 11, 807. https://doi.org/10.3390/machines11080807
Sánchez M, Morales J, Martínez JL. Waypoint Generation in Satellite Images Based on a CNN for Outdoor UGV Navigation. Machines. 2023; 11(8):807. https://doi.org/10.3390/machines11080807
Chicago/Turabian StyleSánchez, Manuel, Jesús Morales, and Jorge L. Martínez. 2023. "Waypoint Generation in Satellite Images Based on a CNN for Outdoor UGV Navigation" Machines 11, no. 8: 807. https://doi.org/10.3390/machines11080807