
Dynamic Characteristics of a Rotating Blade with a Dovetail Fixture

Abstract
:1. Introduction
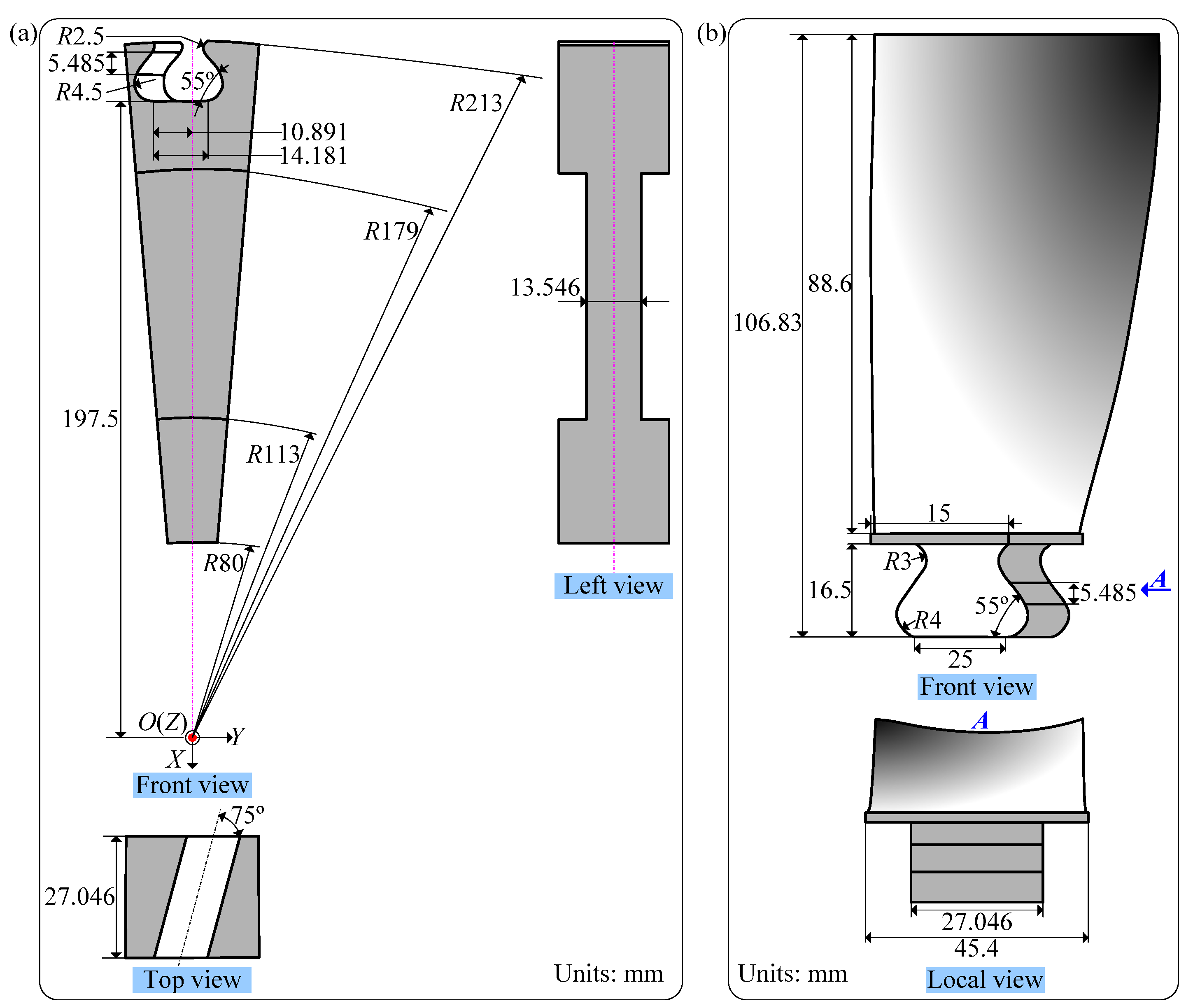
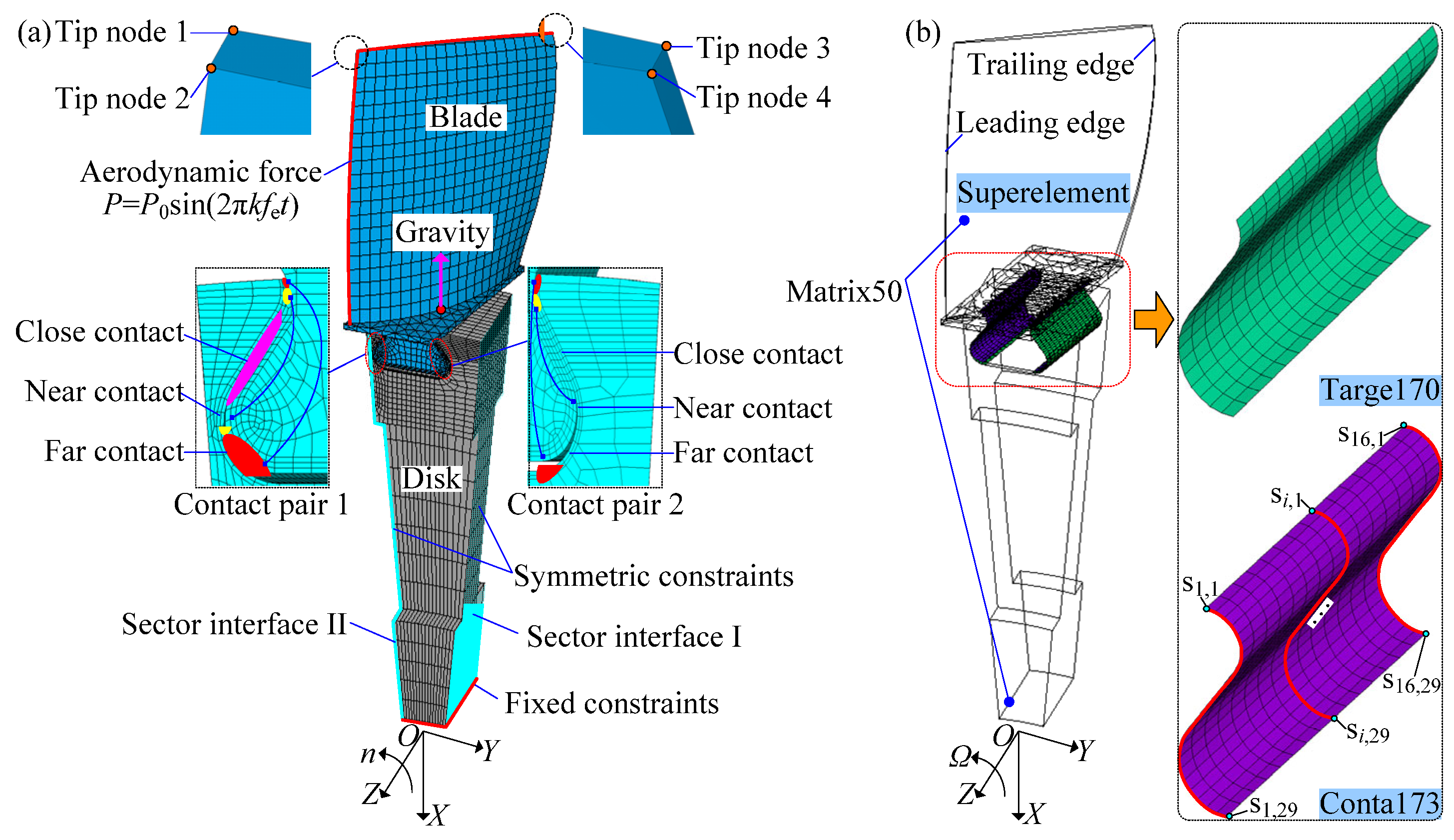
2. Finite Element Model
3. Dynamic Characteristic Analysis
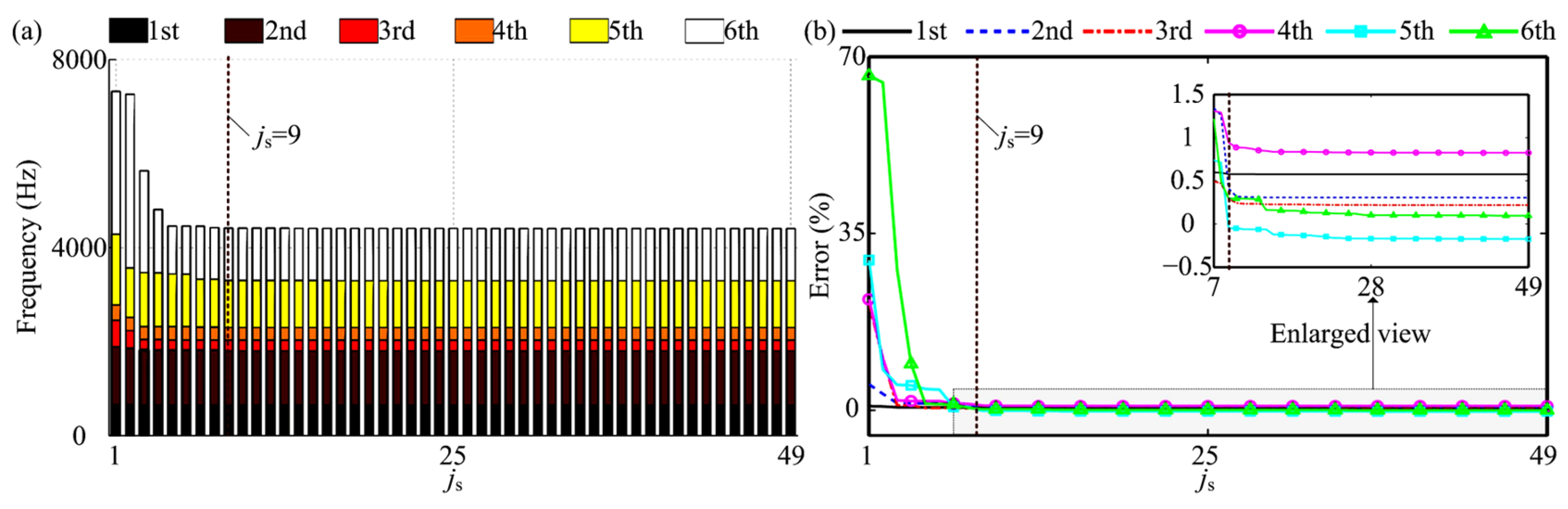
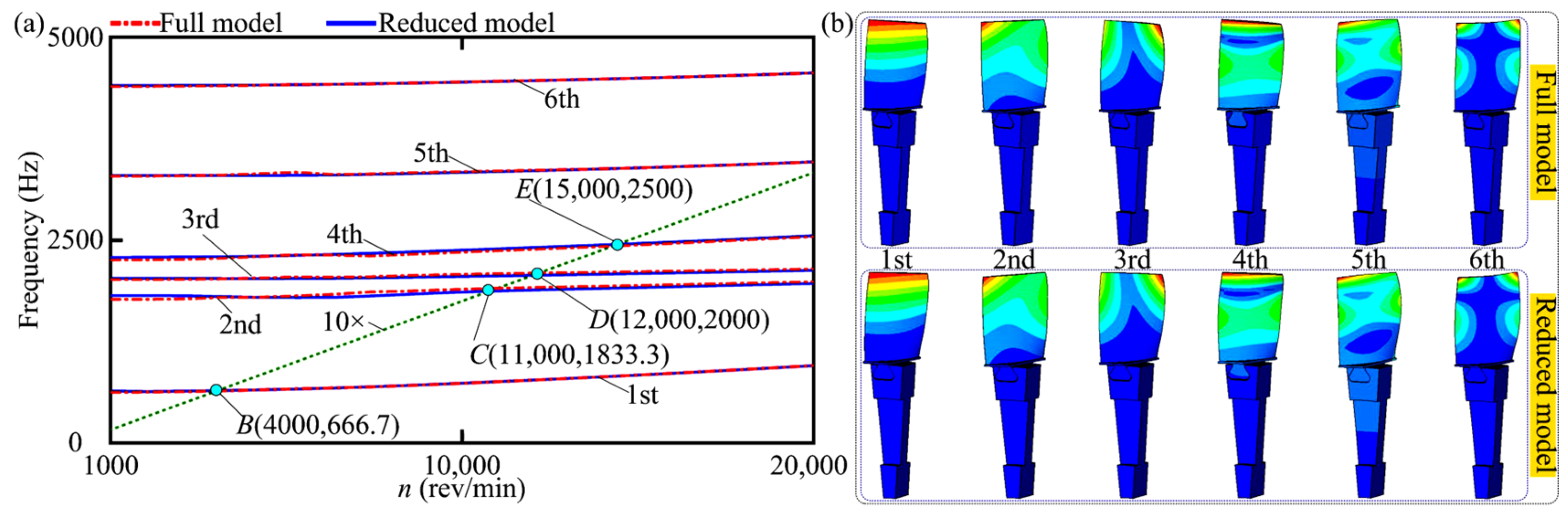
3.1. Modal Characteristics
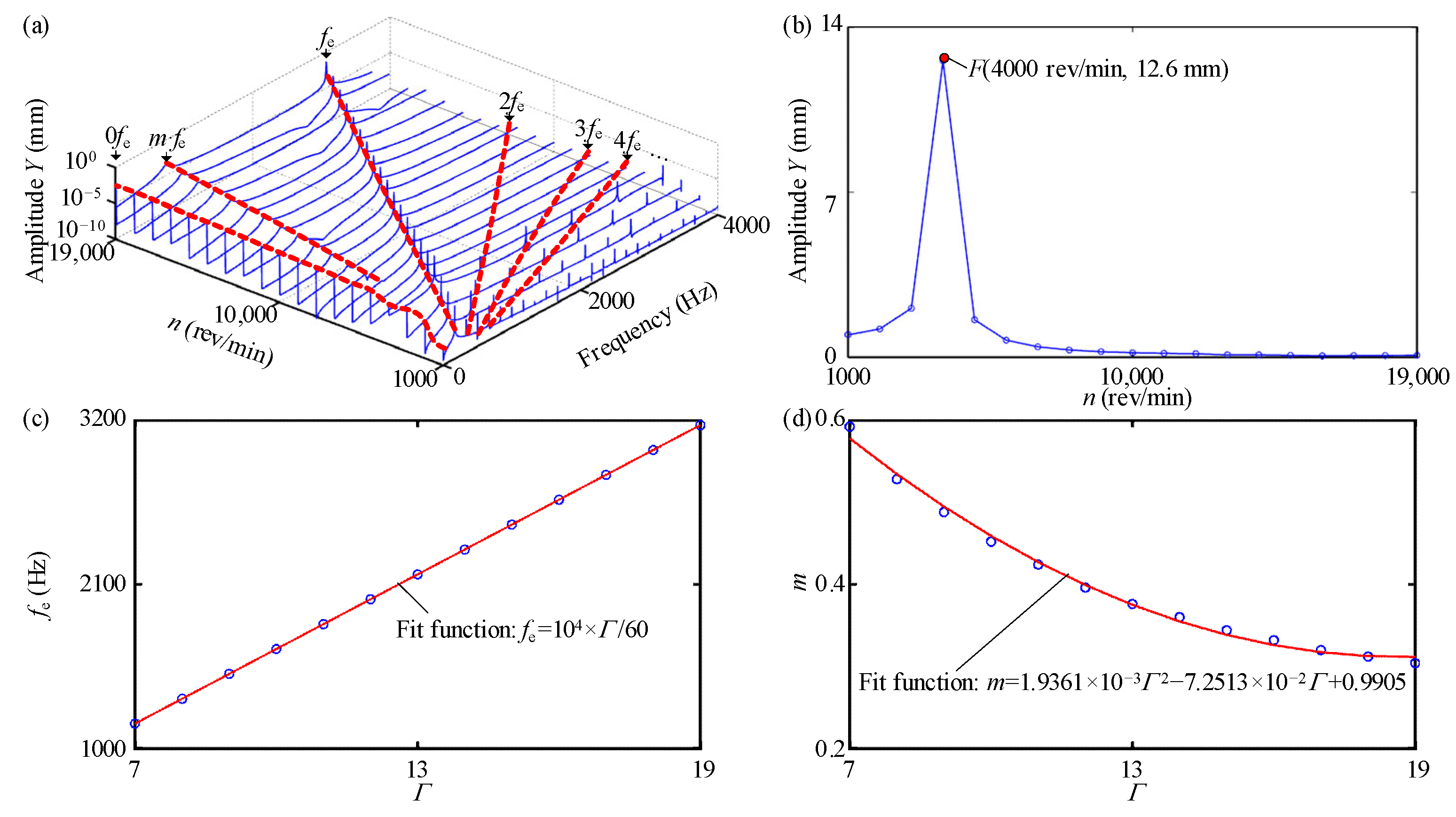
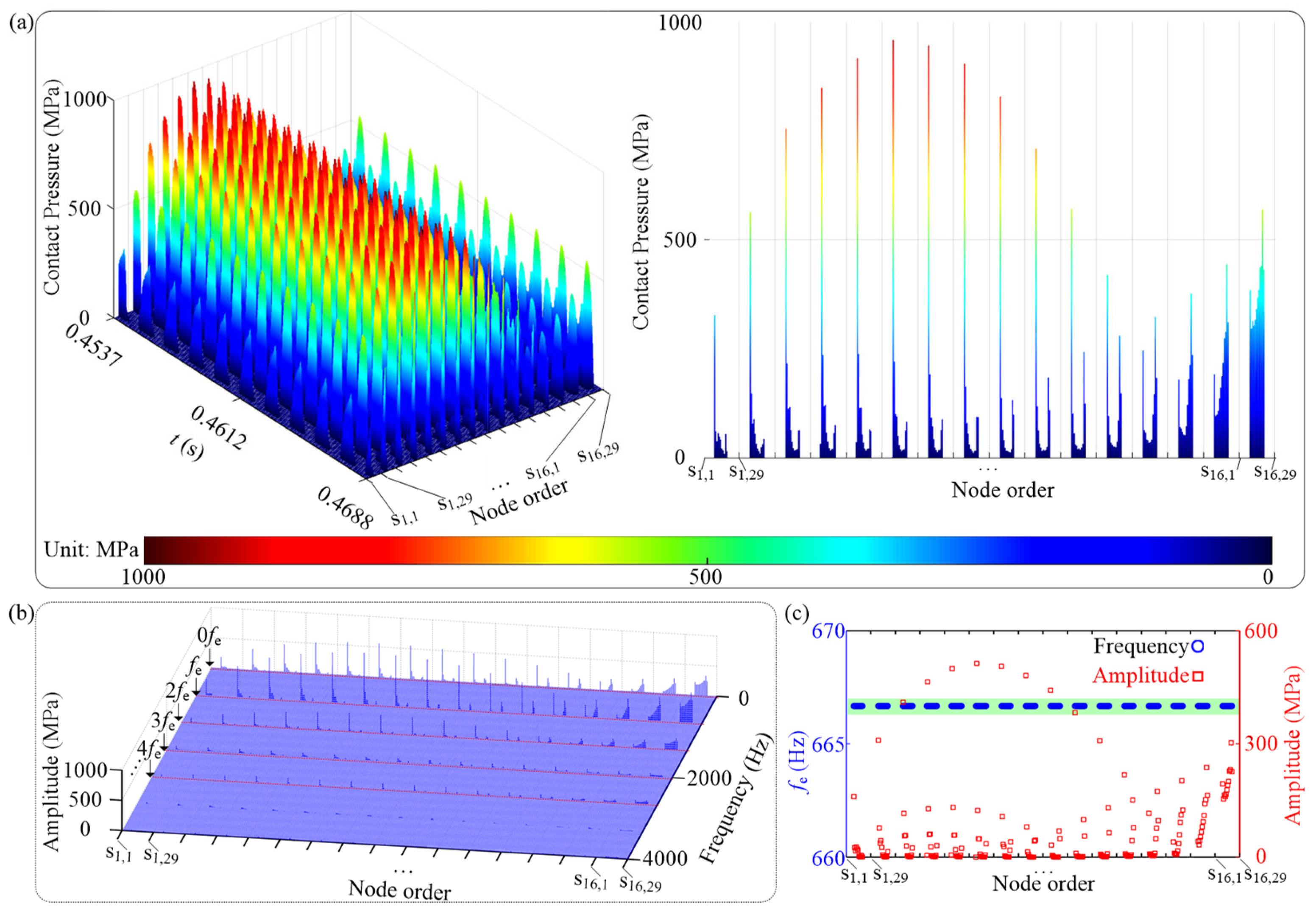
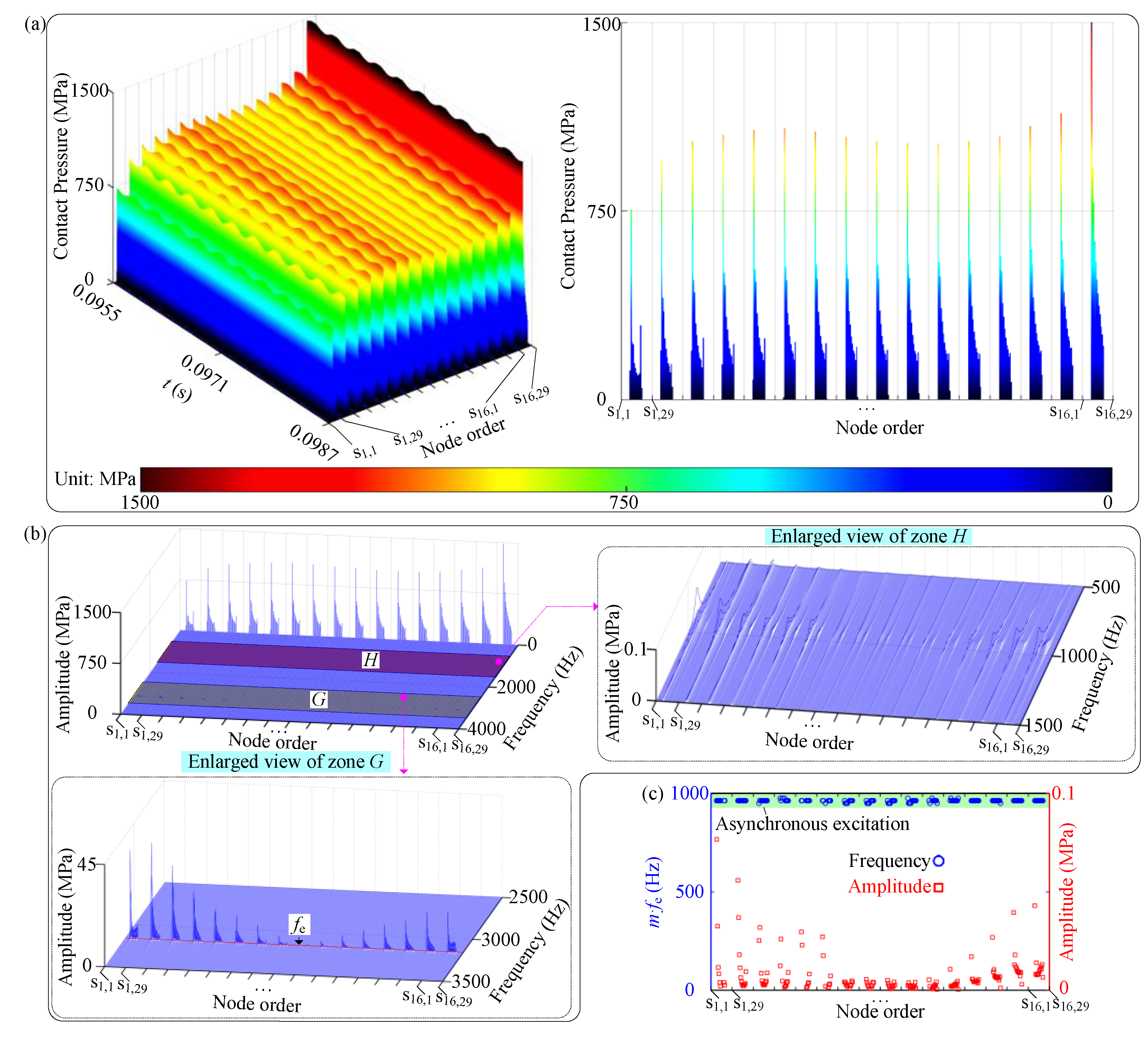
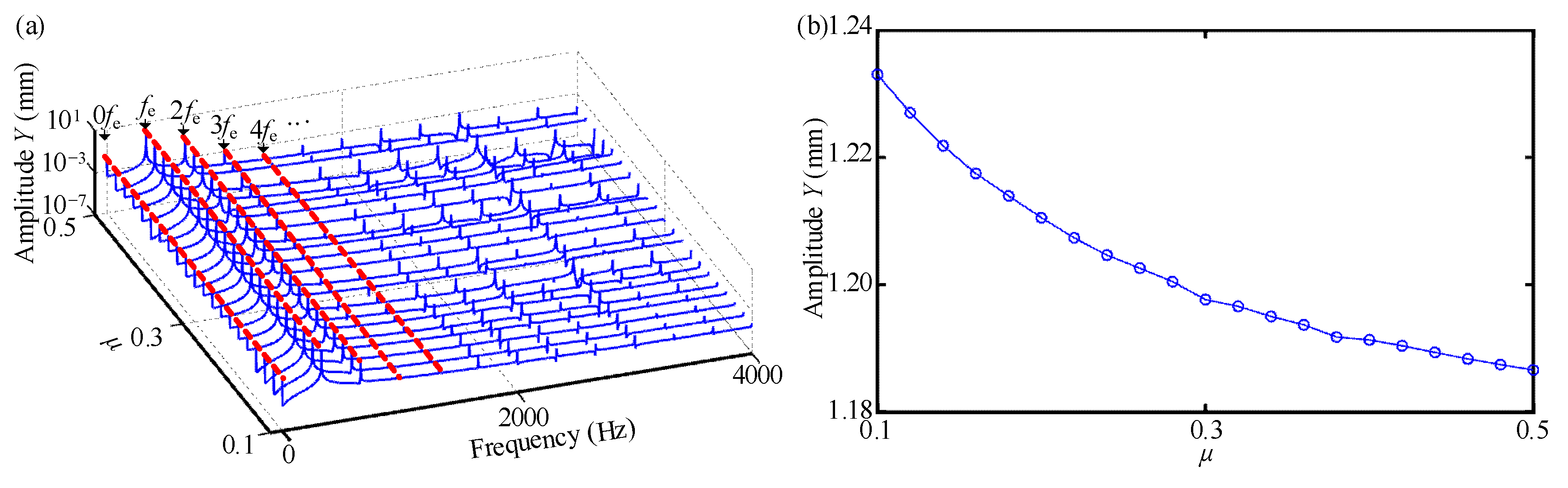
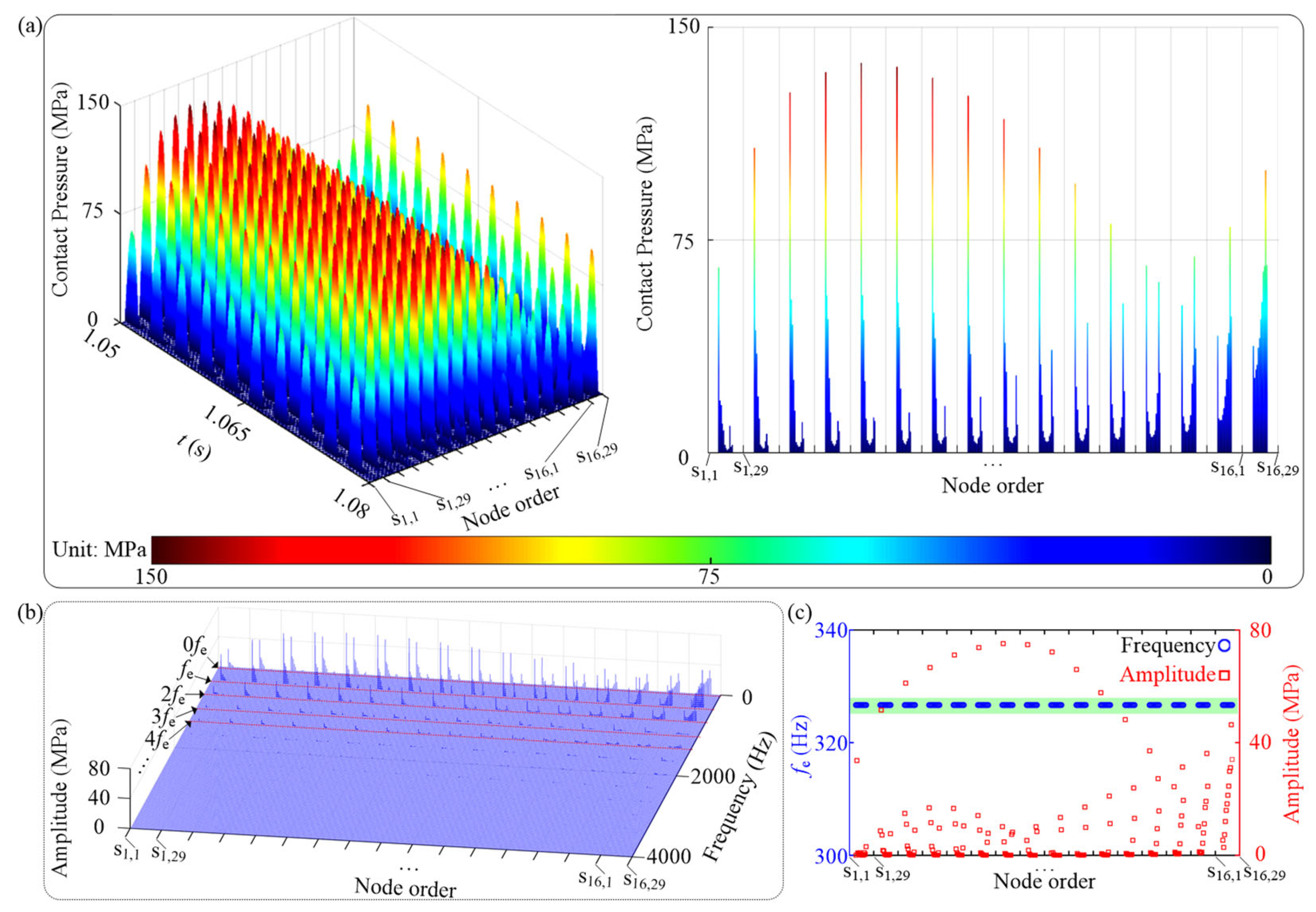
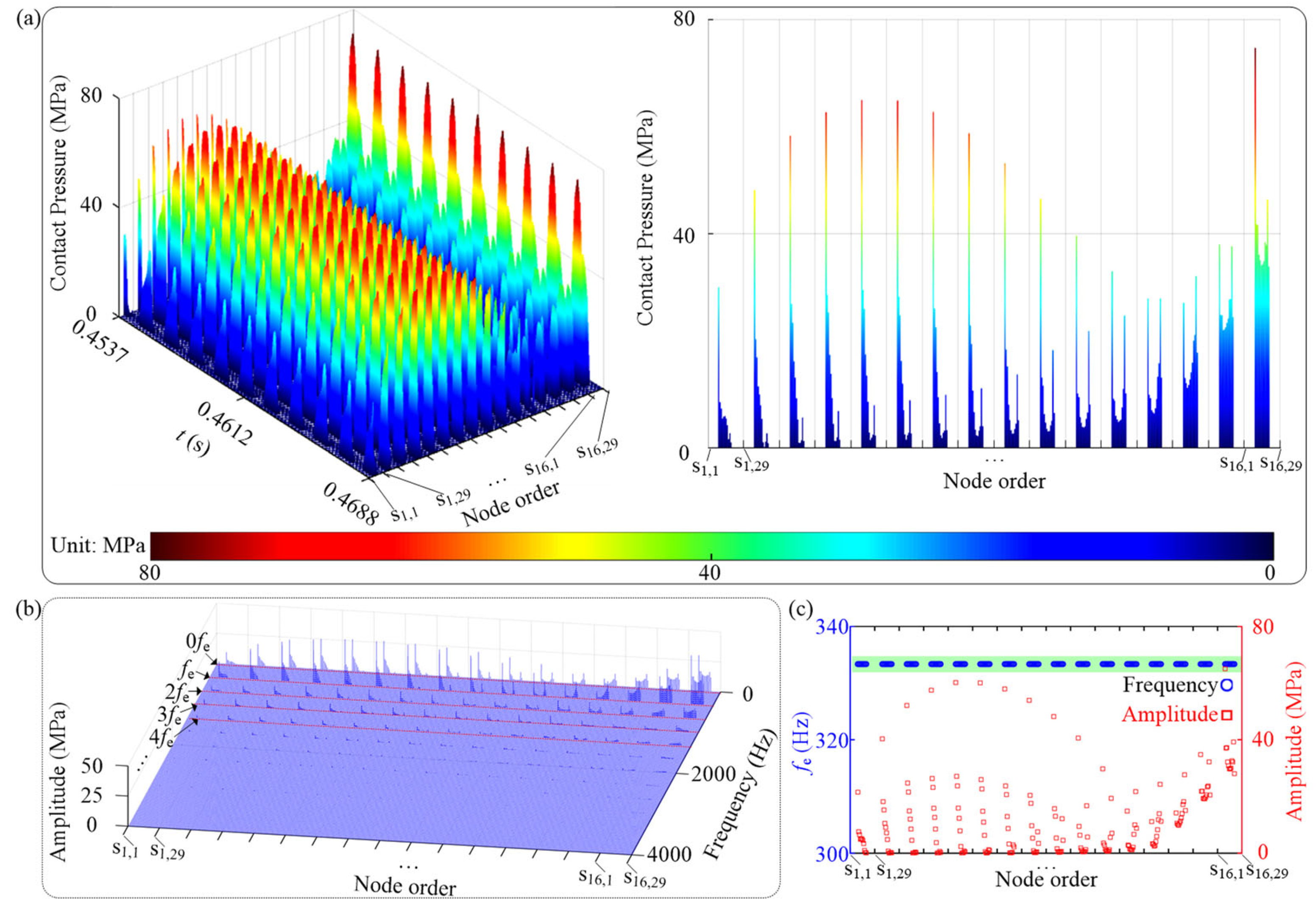
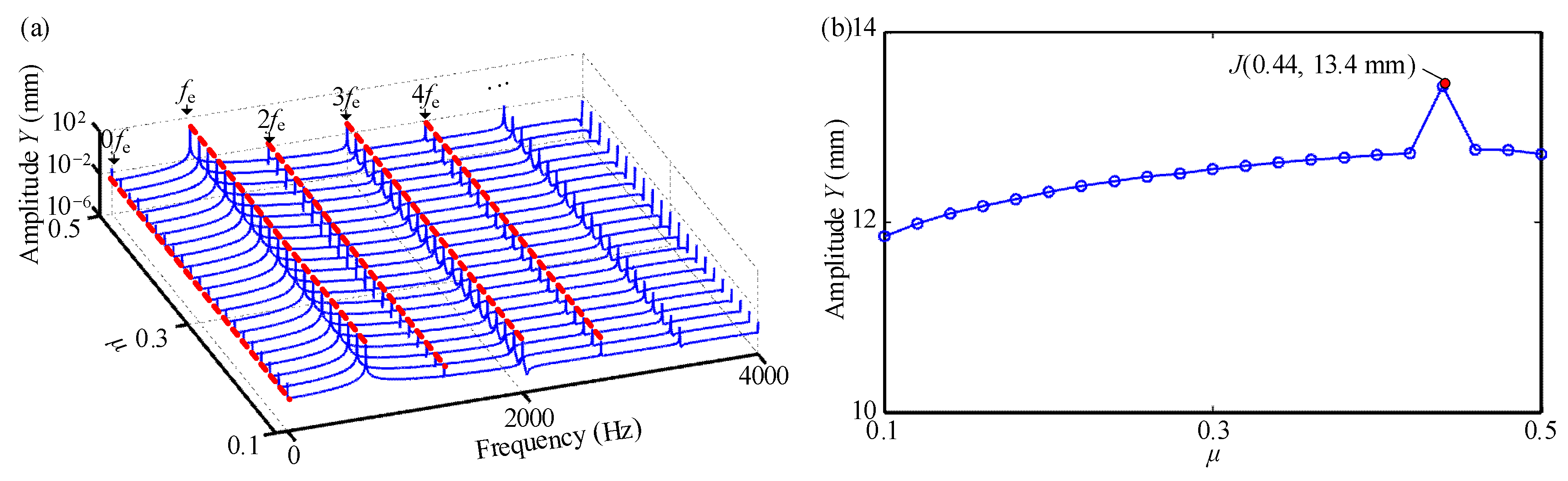
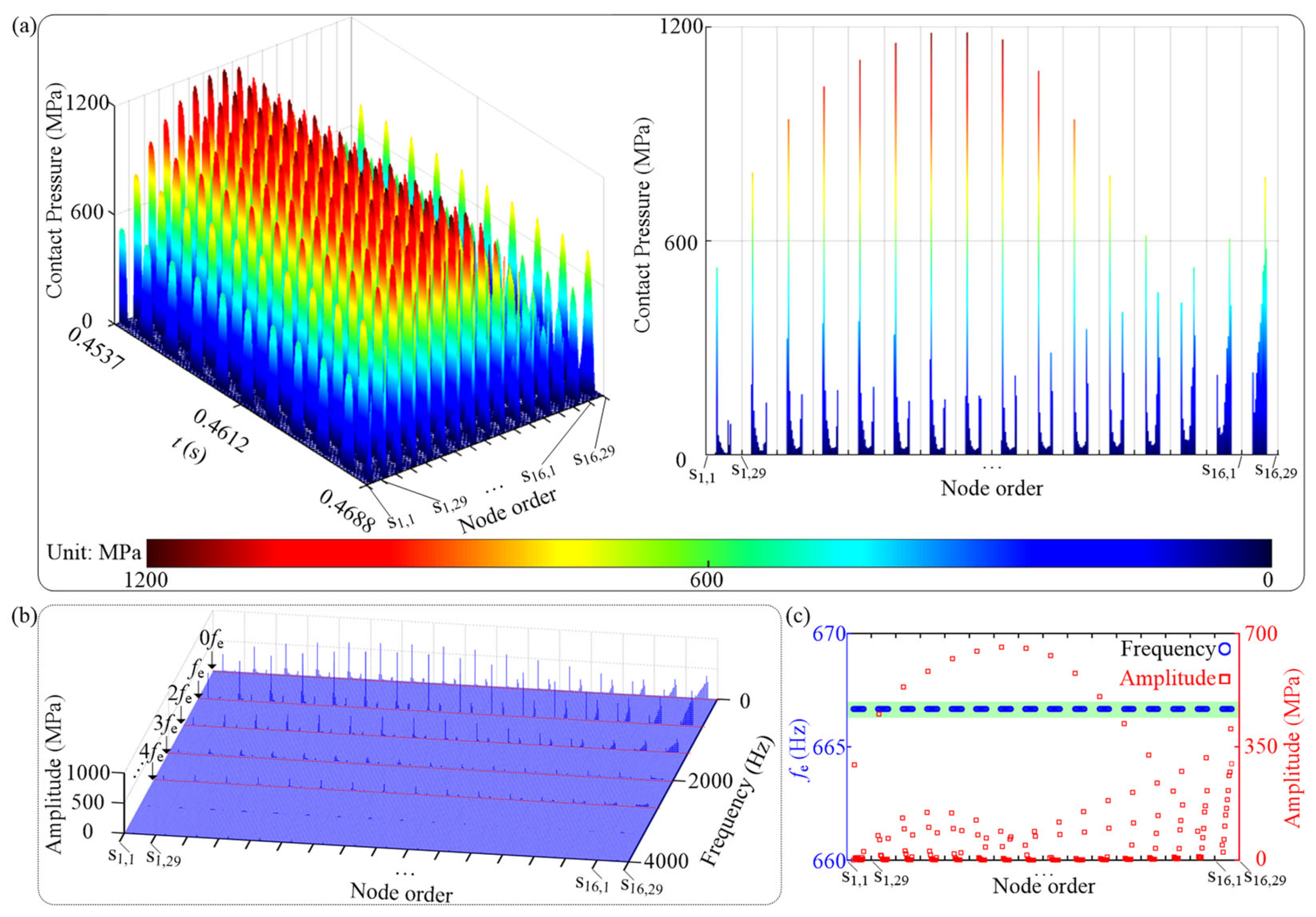
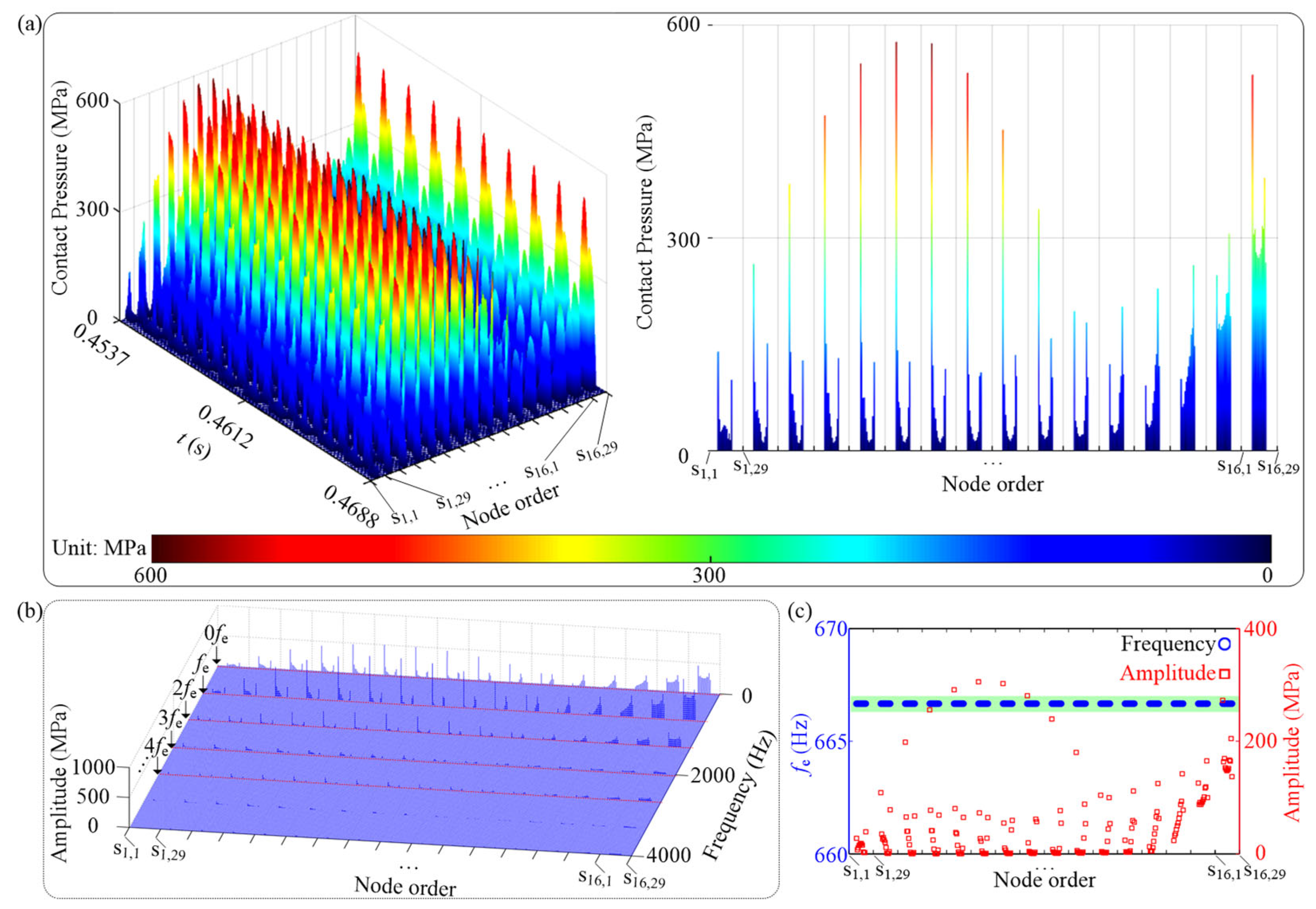
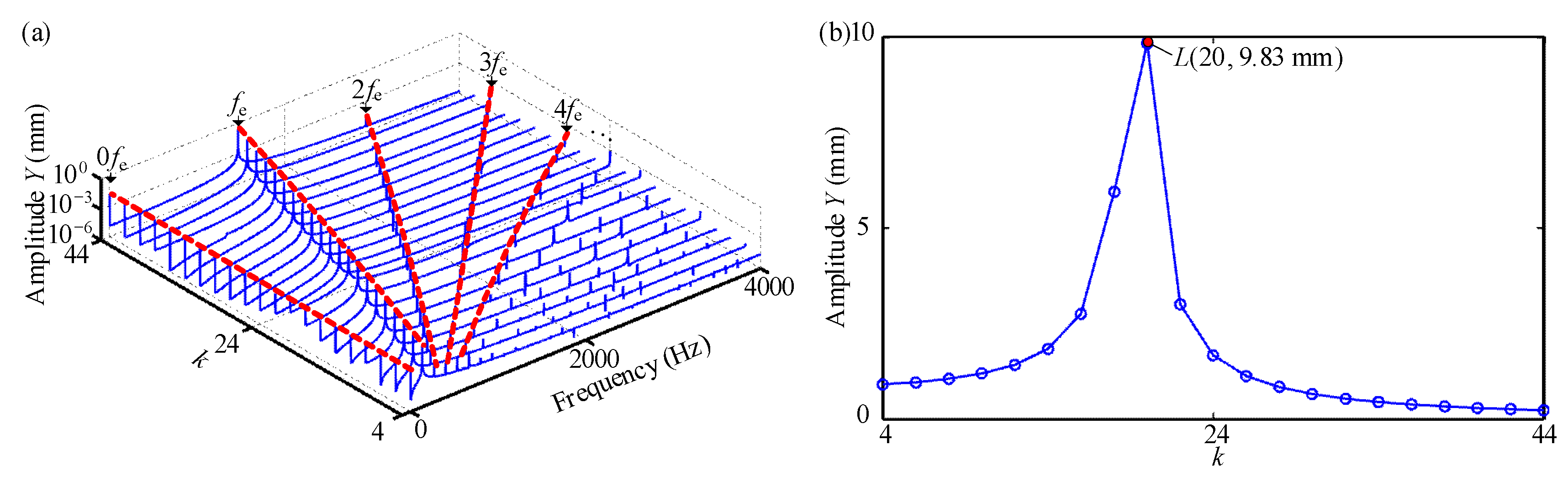
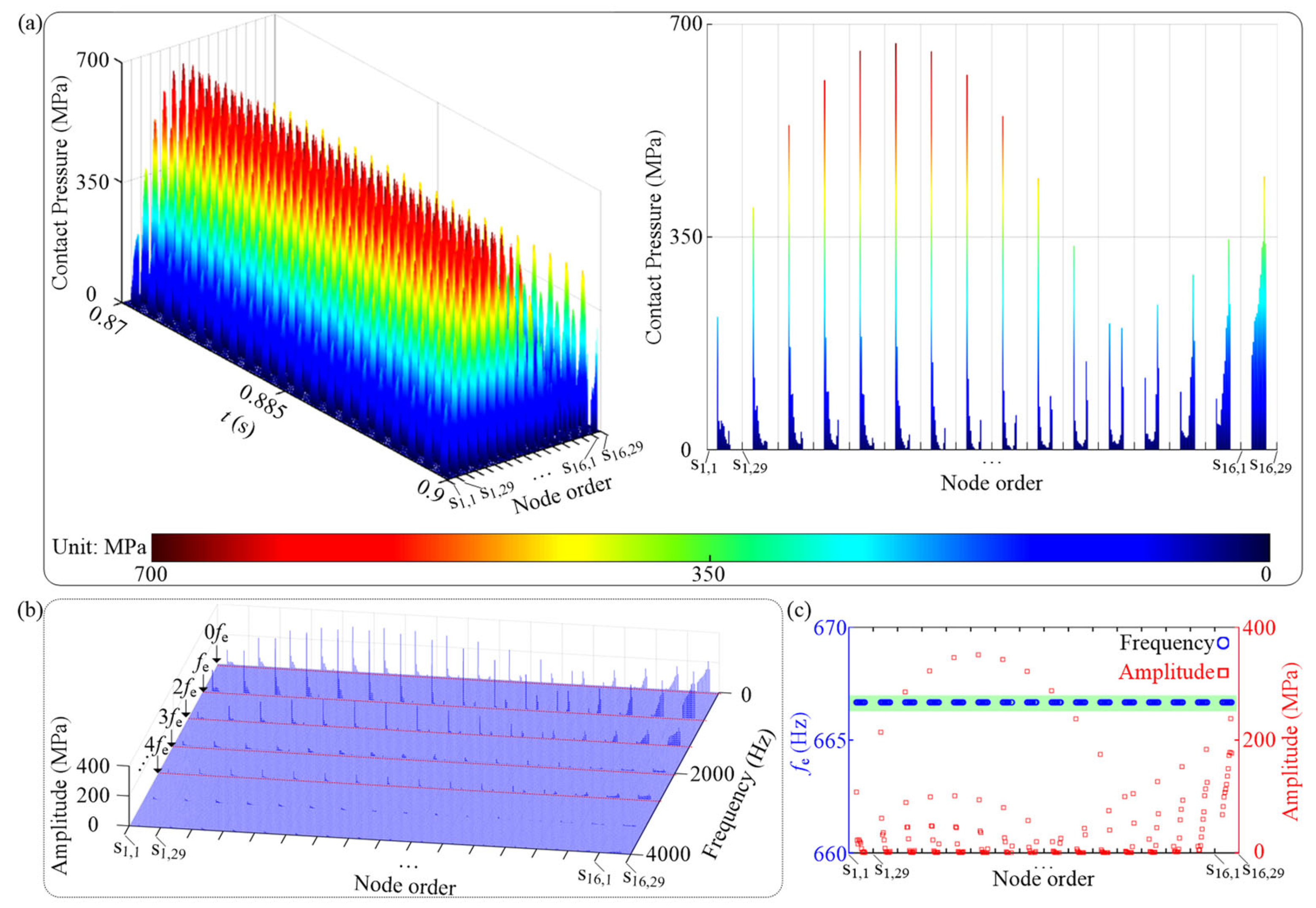
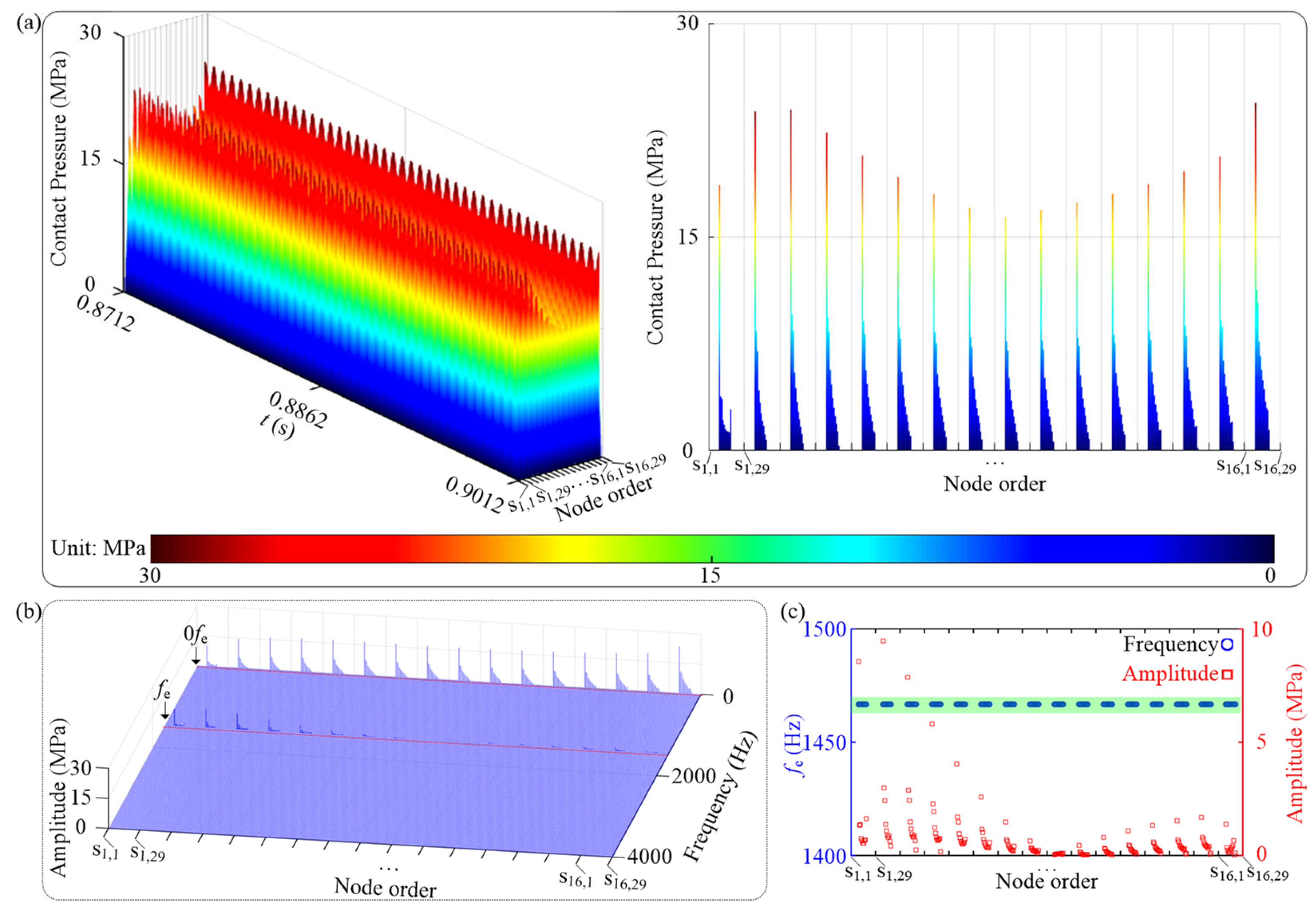
3.2. Nonlinear Vibration Characteristics
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ma, H.; Wang, D.; Tai, X.Y.; Wen, B.C. Vibration response analysis of blade-disk dovetail structure under blade tip rubbing condition. J. Vib. Control 2017, 23, 252–271. [Google Scholar] [CrossRef]
- Quaegebeur, S.; Chouvion, B.; Thouverez, F. Nonlinear dynamic analysis of three-dimensional bladed-disks with frictional contact interfaces based on cyclic reduction strategies. Int. J. Solids Struct. 2022, 236–237, 111277. [Google Scholar] [CrossRef]
- Li, C.F.; Shen, Z.C.; Zhong, B.F.; Wen, B.C. Study on the nonlinear characteristics of a rotating flexible blade with dovetail interface feature. Shock. Vib. 2018, 2018, 4923898. [Google Scholar] [CrossRef]
- Li, C.F.; Liu, X.W.; Tang, Q.S.; Chen, Z.L. Modeling and nonlinear dynamics analysis of a rotating beam with dry friction support boundary conditions. J. Sound Vib. 2021, 498, 115978. [Google Scholar] [CrossRef]
- She, H.X.; Li, C.F.; Tang, Q.S.; Wen, B.C. Veering and merging analysis of nonlinear resonance frequencies of an assembly bladed disk system. J. Sound Vib. 2021, 493, 115818. [Google Scholar] [CrossRef]
- Shangguan, B.; Xu, Z. Experimental study of friction damping of blade with loosely assembled dovetail attachment. Proc. Inst. Mech. Eng. Part A J. Power Energy 2012, 226, 738–750. [Google Scholar] [CrossRef]
- Shangguan, B.; Yu, F.L.; Duan, J.Y.; Gao, S.; Xiao, J.F. A fractal contact friction model and nonlinear vibration response studies of loosely assembled blade with dovetail root. In Proceedings of the ASME Turbo Expo 2016: Turbomachinery Technical Conference and Exposition, Seoul, Republic of Korea, 13–17 June 2016. [Google Scholar]
- Lassalle, M.; Firrone, C.M. A parametric study of limit cycle oscillation of a bladed disk caused by flutter and friction at the blade root joints. J. Fluids Struct. 2018, 76, 349–366. [Google Scholar] [CrossRef]
- Zucca, S.; Firrone, C.M.; Gola, M.M. Numerical assessment of friction damping at turbine blade root joints by simultaneous calculation of the static and dynamic contact loads. Nonlinear Dyn. 2012, 67, 1934–1955. [Google Scholar] [CrossRef]
- Appaji Gowda, B.M.; Yeshovanth, H.R.; Siddaraju, C. Investigation and efficient modeling of an dovetail attachment in aero-engine. Procedia Mater. Sci. 2014, 5, 1873–1879. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.J.; Zang, C.P.; Zhou, B.; Petrov, E.P. A study of friction microslip modeling for dynamic analysis of bladed discs with root joints. J. Mech. Eng. Sci. 2018, 233, 2599–2641. [Google Scholar] [CrossRef]
- Chen, J.J.; Zang, C.P.; Zhou, B.; Petrov, E.P. High-fidelity calculation of modal damping caused by friction at blade roots for single blades and tuned bladed disc assemblies. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2021, 235, 2810–2831. [Google Scholar] [CrossRef]
- Joannin, C.; Chouvion, B.; Thouverze, F.; Mbaye, M.; Ousty, J.P. Nonlinear modal analysis of mistuned periodic structures subjected to dry friction. J. Eng. Gas Turbines Power 2016, 138, 072504. [Google Scholar] [CrossRef] [Green Version]
- Schwarz, S.; Kohlmann, L.; Hartung, A.; Gross, J.; Scheel, M.; Krack, M. Validation of a turbine blade component test with frictional contacts by phase-locked-loop and force-controlled measurements. J. Eng. Gas Turbines Power 2020, 142, 051006. [Google Scholar] [CrossRef]
- Liu, T.Y.; Zhang, D.; Xie, Y.H. A nonlinear vibration analysis of forced response for a bladed-disk with dry friction dampers. J. Low Freq. Noise Vib. Act. Control 2019, 38, 1522–1539. [Google Scholar] [CrossRef]
- Canale, G.; Kinawy, M.; Maligno, A.; Sathujoda, P.; Citarella, R. Study of mixed-mode cracking of dovetail root of an aero-engine blade like structure. Appl. Sci. 2019, 9, 3825. [Google Scholar] [CrossRef] [Green Version]
- Yuan, J.; Schwingshackl, C.; Salles, L.; Wong, C.; Patsias, S. Reduced order method based on an adaptive formulation and its application to fan blade system with dovetail joints. In Proceedings of the ASME Turbo Expo 2020: Turbomachinery Technical Conference and Exposition, London, UK, 22–26 June 2020. [Google Scholar]
- Anandavel, K.; Prakash, R.V.; Davis, A. Effect of preloading on the contact stress distribution of a dovetail interface. World Acad. Sci. Eng. Technol. 2010, 4, 1107–1112. [Google Scholar]
- Fernandes, R.; El-Borgi, S.; Ahmed, K.; Friswell, M.I.; Jamia, N. Static fracture and modal analysis simulation of a gas turbine compressor blade and bladed disk system. Adv. Model. Simul. Eng. Sci. 2016, 3, 30. [Google Scholar] [CrossRef] [Green Version]
- Wei, D.S.; Ma, M.D.; Zhang, H.; Hu, C.; Wang, Y.R. Study of the variation of contact state near the contact boundary in a dovetail attachment under different loads. Eng. Fail. Anal. 2019, 105, 518–526. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cases | Analysis Type | Gravity | Constant Parameters | Varying Parameters |
|---|---|---|---|---|
| 1 | Prestressed modal | No | n = 4000 rev/min, μ = 0.3, P0 = 0 MPa | js∈[1, 49], Δjs = 1; |
| 2 | js = 10, μ = 0.3, P0 = 0 MPa | n∈[1000, 20,000] rev/min, Δn = 1000 rev/min; | ||
| 3 | Transient | Yes | js = 10, P0 = 0.1 MPa, μ = 0.3, k = 10 | fe = k·fr, n∈[1000, 20,000] rev/min, Δn = 1000 rev/min; |
| 4 | js = 10, P0 = 0.1 MPa, k = 10 | fe = k·fr, n = 2000 rev/min, 4000 rev/min; μ∈[0.1, 0.5], Δμ = 0.02 | ||
| 5 | js = 10, P0 = 0.1 MPa, n = 2000 rev/min, μ = 0.3 | fe = k·fr, k∈[4, 44] rev/min, Δk = 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, X.; Liang, W.; Zeng, J.; Yang, Y.; Ma, H.; Fan, C.; Fu, S. Dynamic Characteristics of a Rotating Blade with a Dovetail Fixture. Machines 2023, 11, 643. https://doi.org/10.3390/machines11060643
Fan X, Liang W, Zeng J, Yang Y, Ma H, Fan C, Fu S. Dynamic Characteristics of a Rotating Blade with a Dovetail Fixture. Machines. 2023; 11(6):643. https://doi.org/10.3390/machines11060643
Chicago/Turabian StyleFan, Xiaoyu, Wenchao Liang, Jin Zeng, Yang Yang, Hui Ma, Chenguang Fan, and Shunguo Fu. 2023. "Dynamic Characteristics of a Rotating Blade with a Dovetail Fixture" Machines 11, no. 6: 643. https://doi.org/10.3390/machines11060643