
Optimal Coordinated Control of Active Front Steering and Direct Yaw Moment for Distributed Drive Electric Bus


Abstract
:1. Introduction
2. Vehicle System Modeling
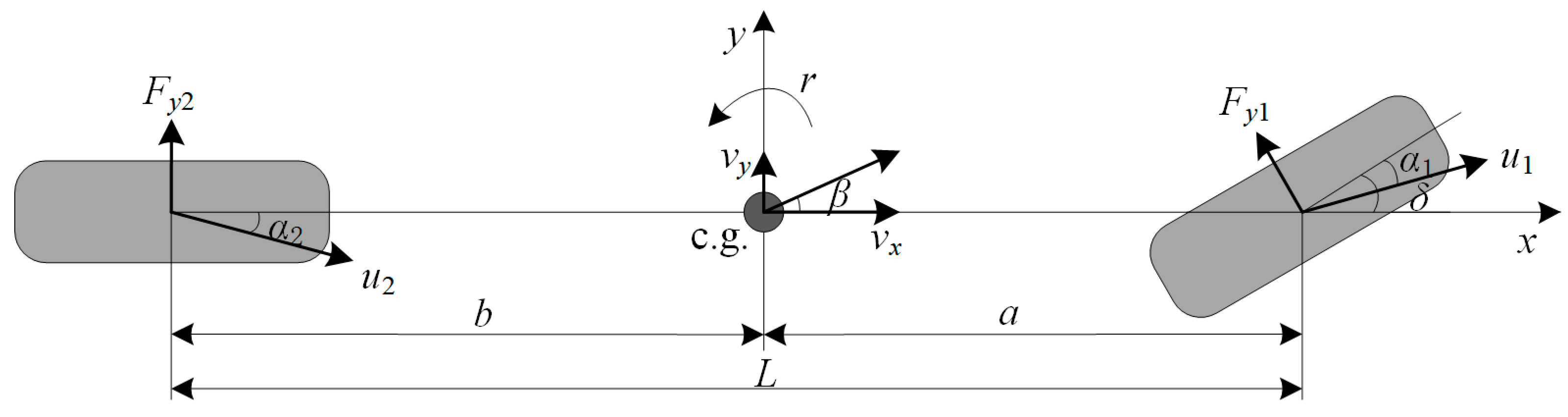
2.1. Linear 2-DOF Vehicle Model
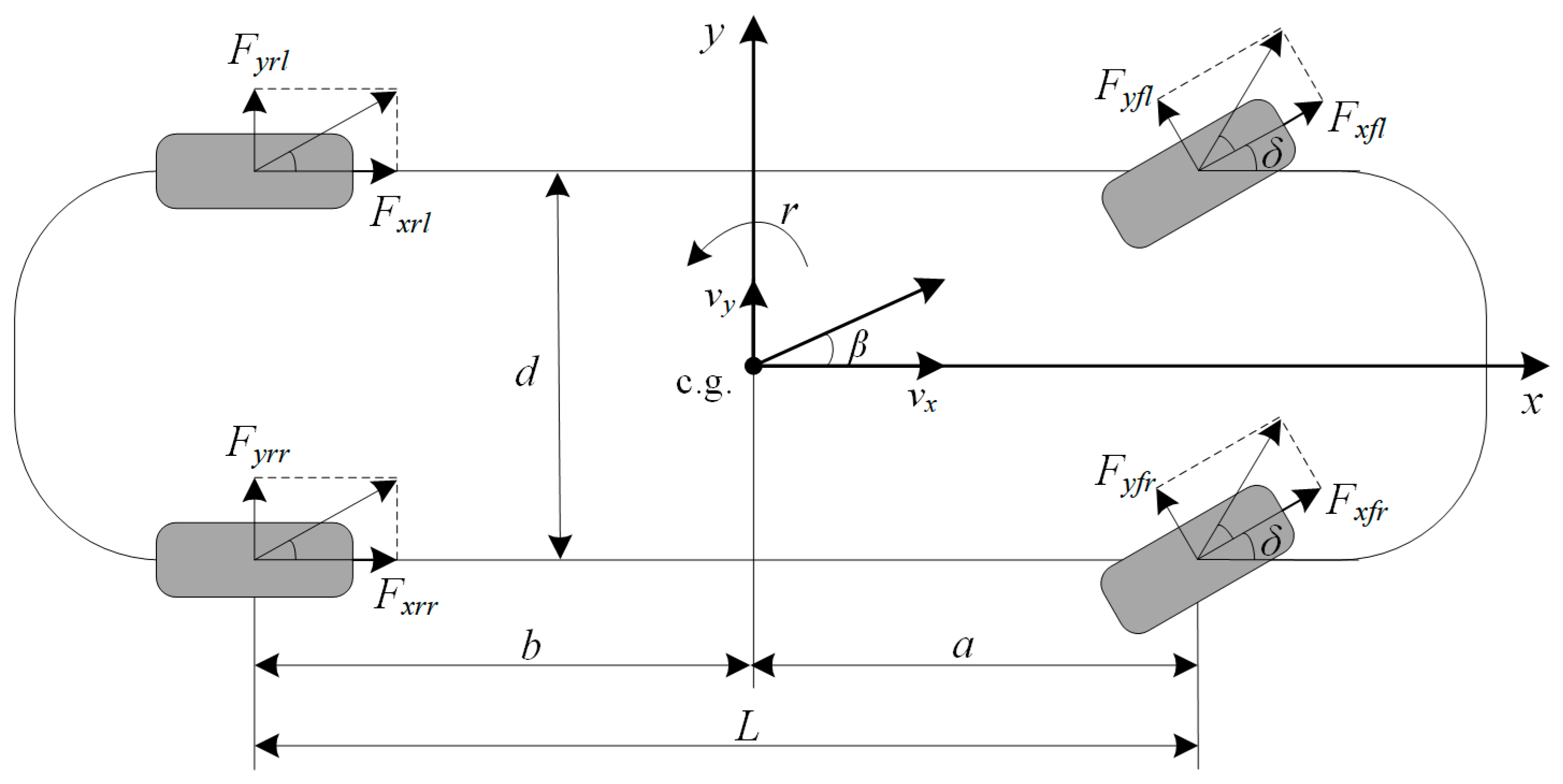
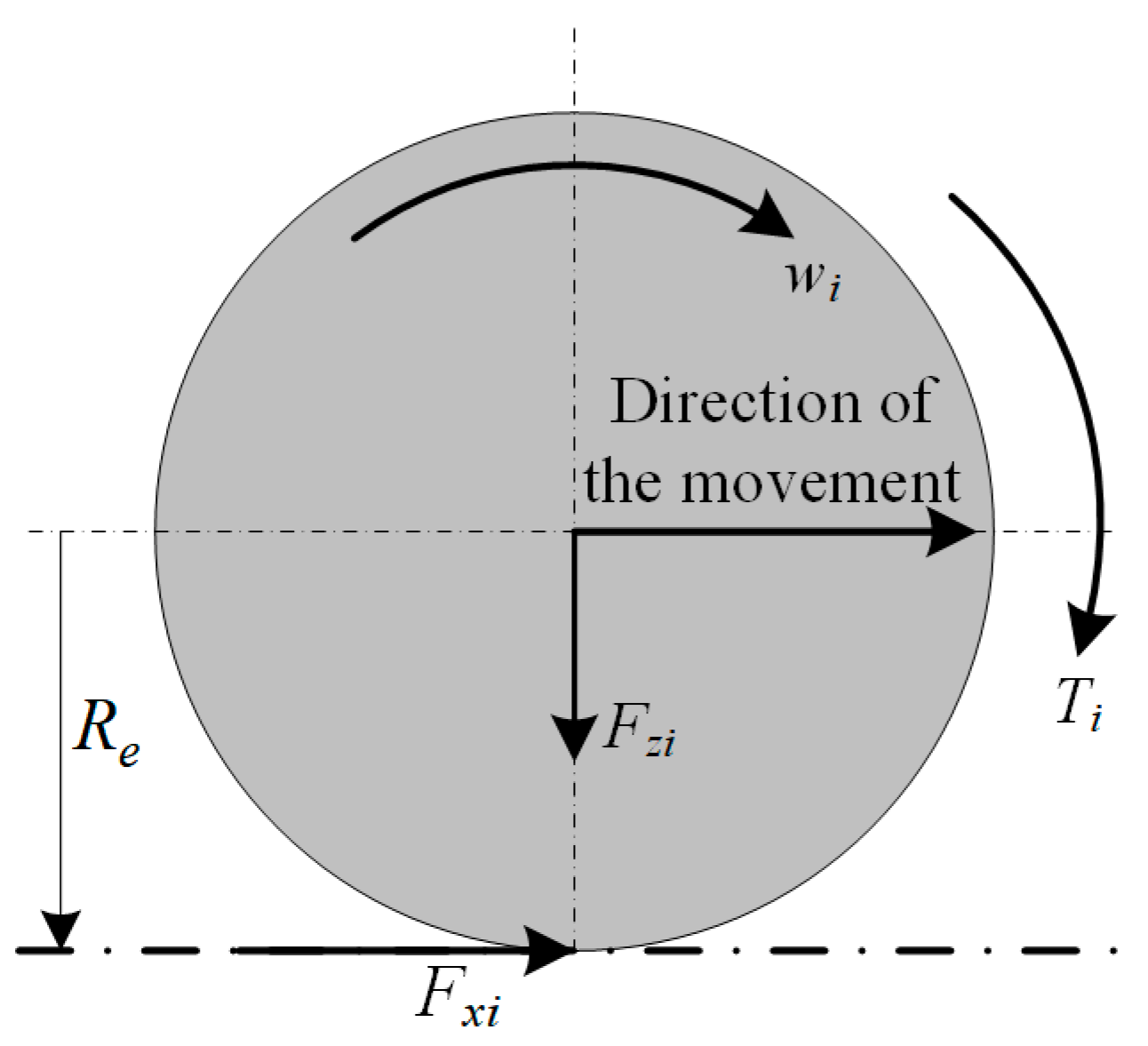
2.2. Nonlinear 7-DOF Vehicle Model
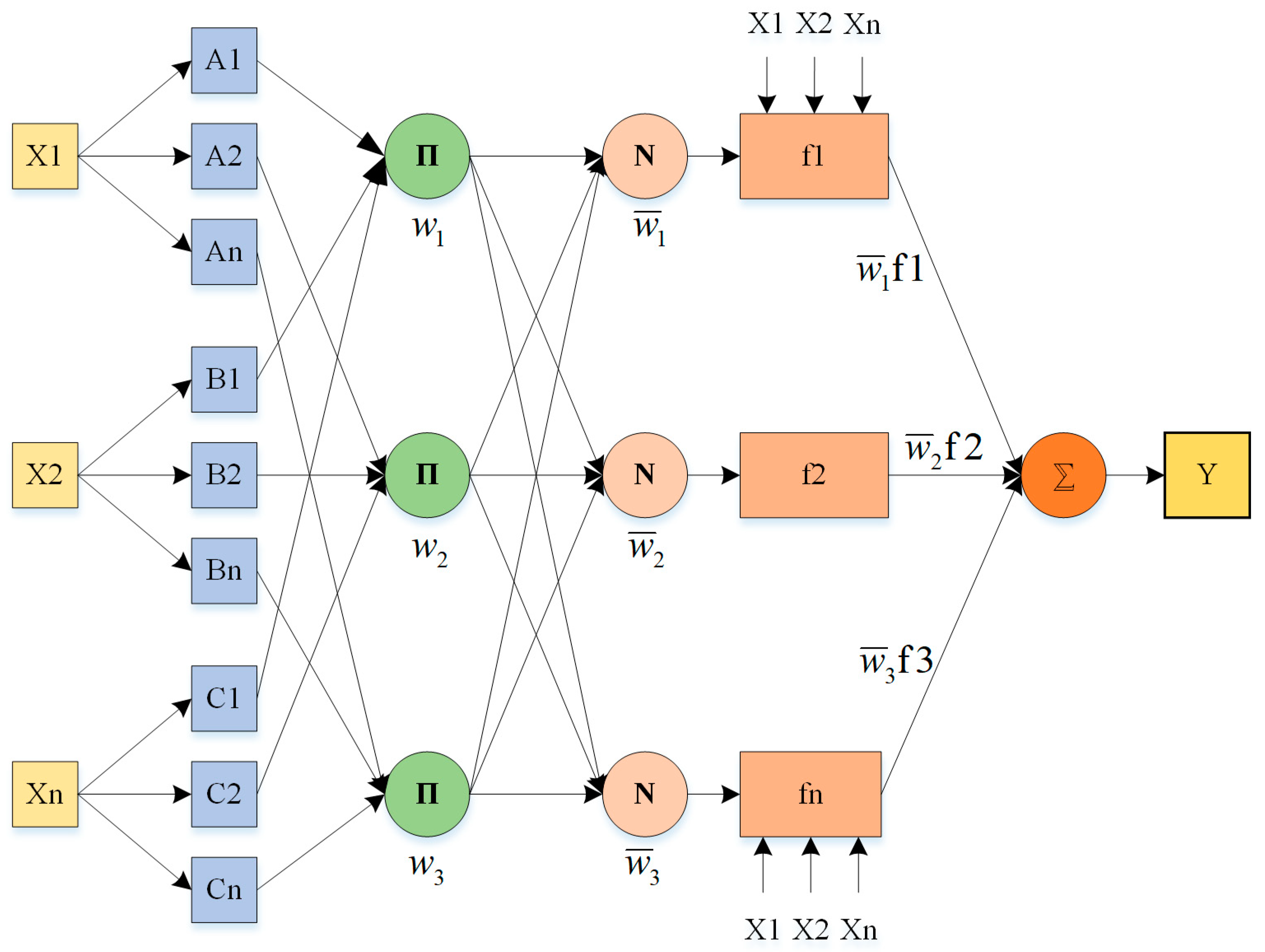
3. State Observer
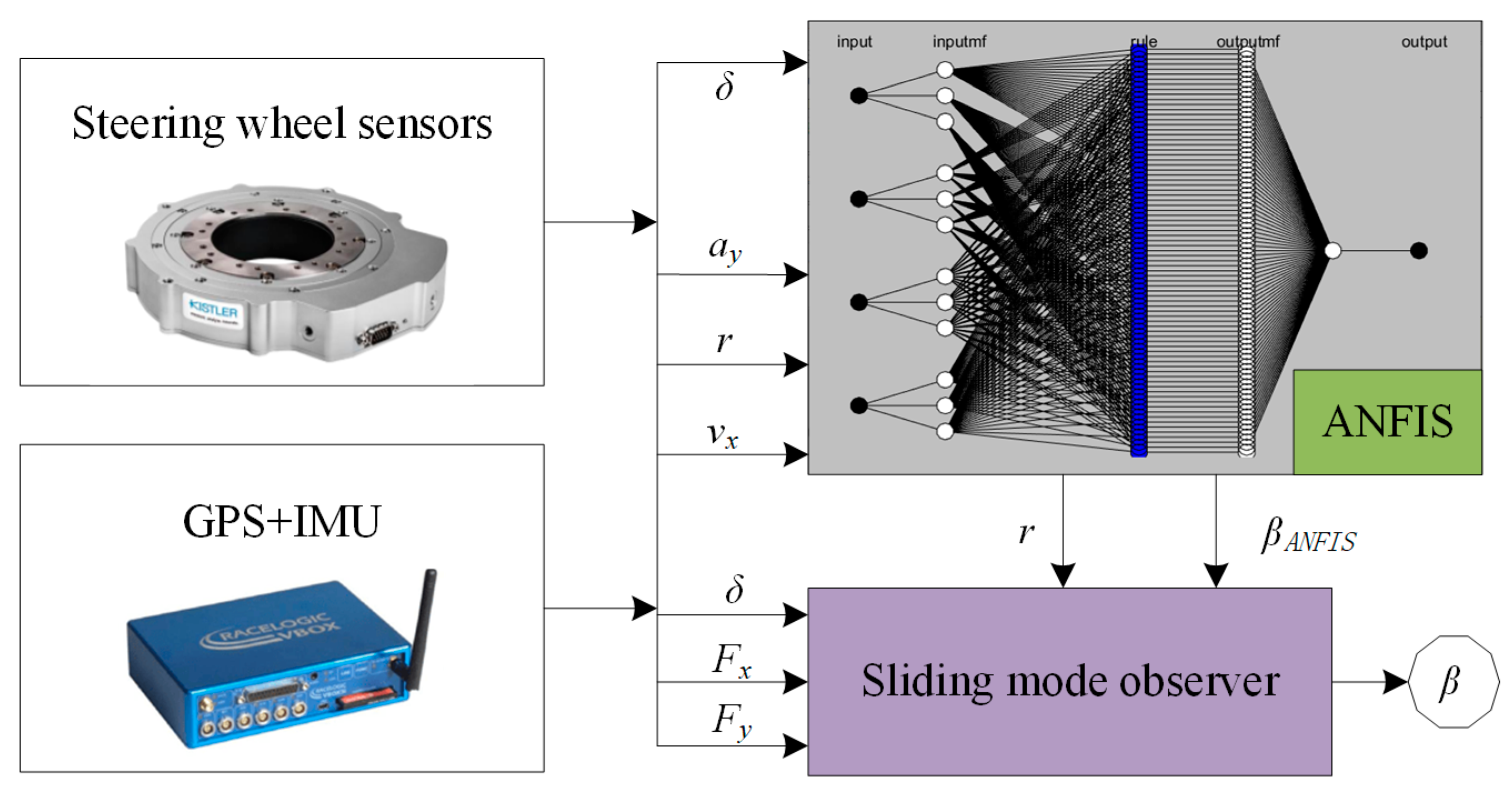
3.1. The Observer Design
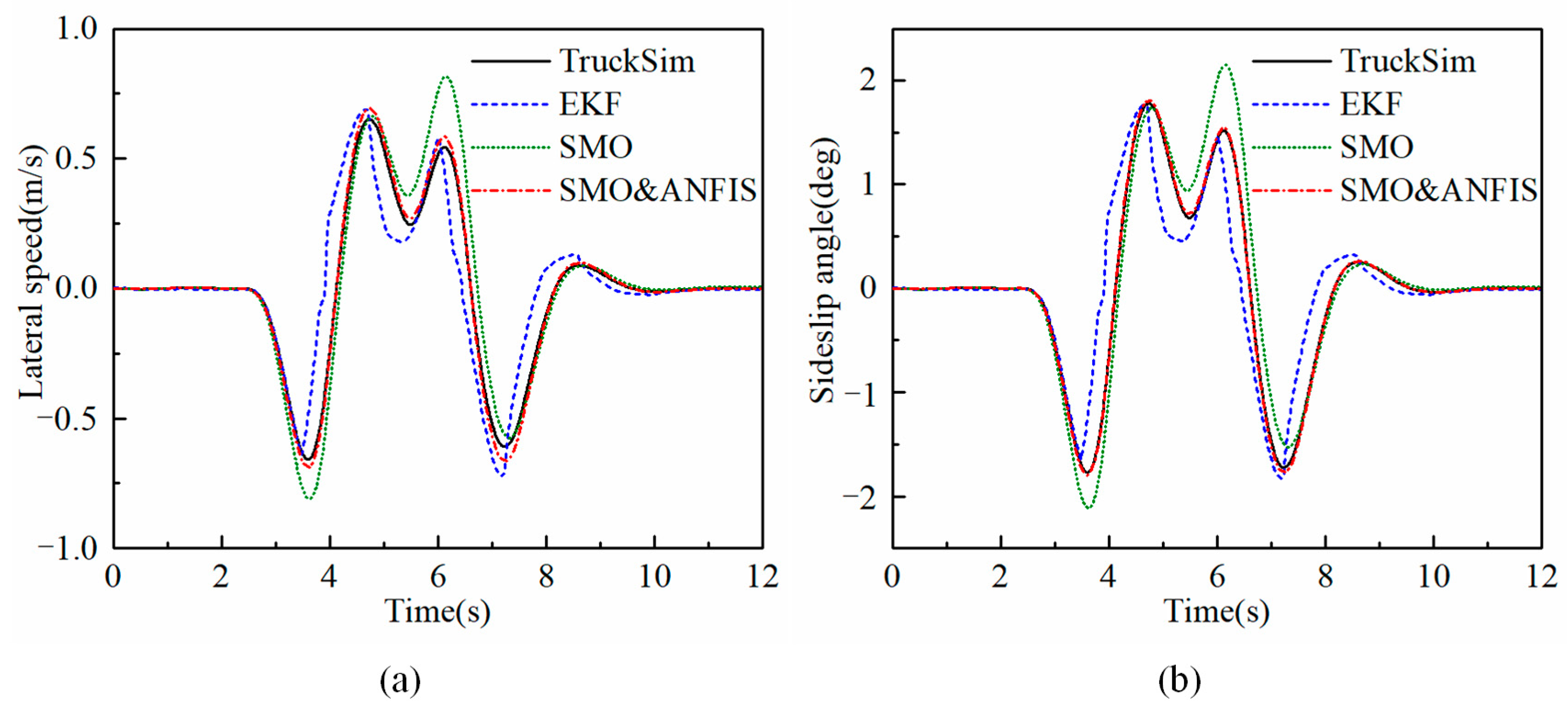
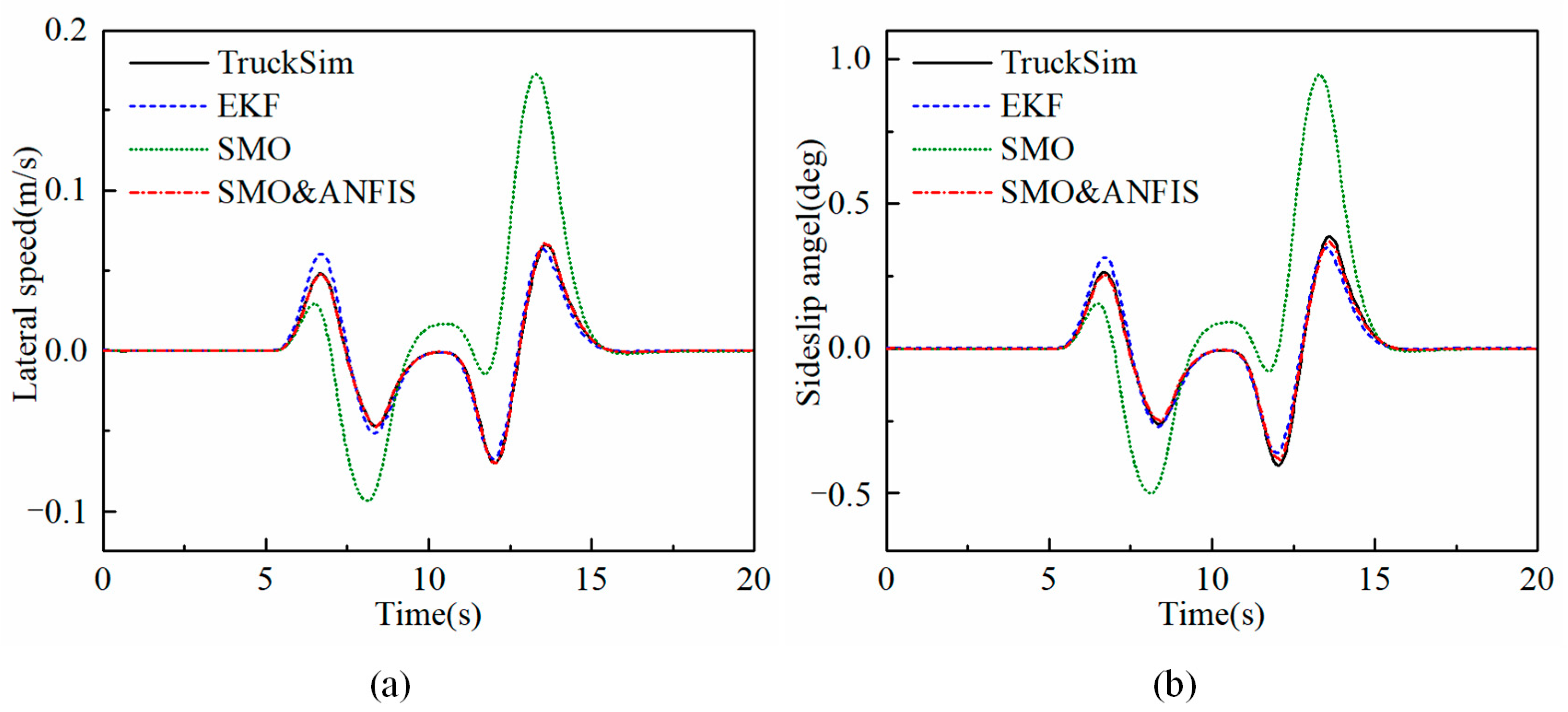
3.2. The Observer Simulation Verification
4. Hierarchical Coordinated Controller Design
4.1. AFS Controller Design for Handling
4.1.1. Sideslip Angle Controller
4.1.2. Yaw Rate Controller
4.2. DYC Controller Design for Stability
4.2.1. Adaptive Fuzzy Sliding Mode Controller
4.2.2. Torque Distribution Controller
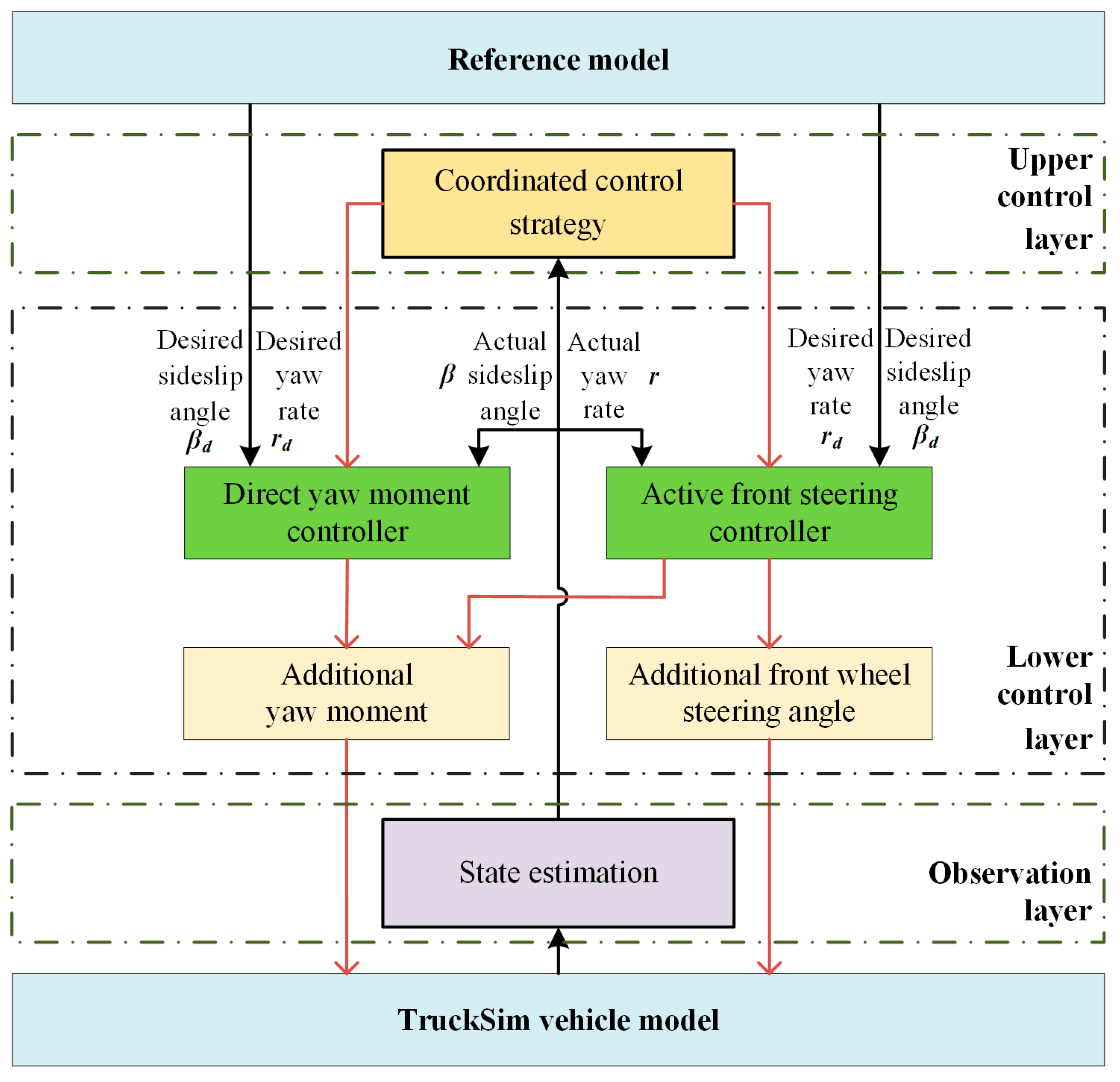
4.3. Coordinated Controller Design
4.3.1. Overall Structure of the Coordinated Controller
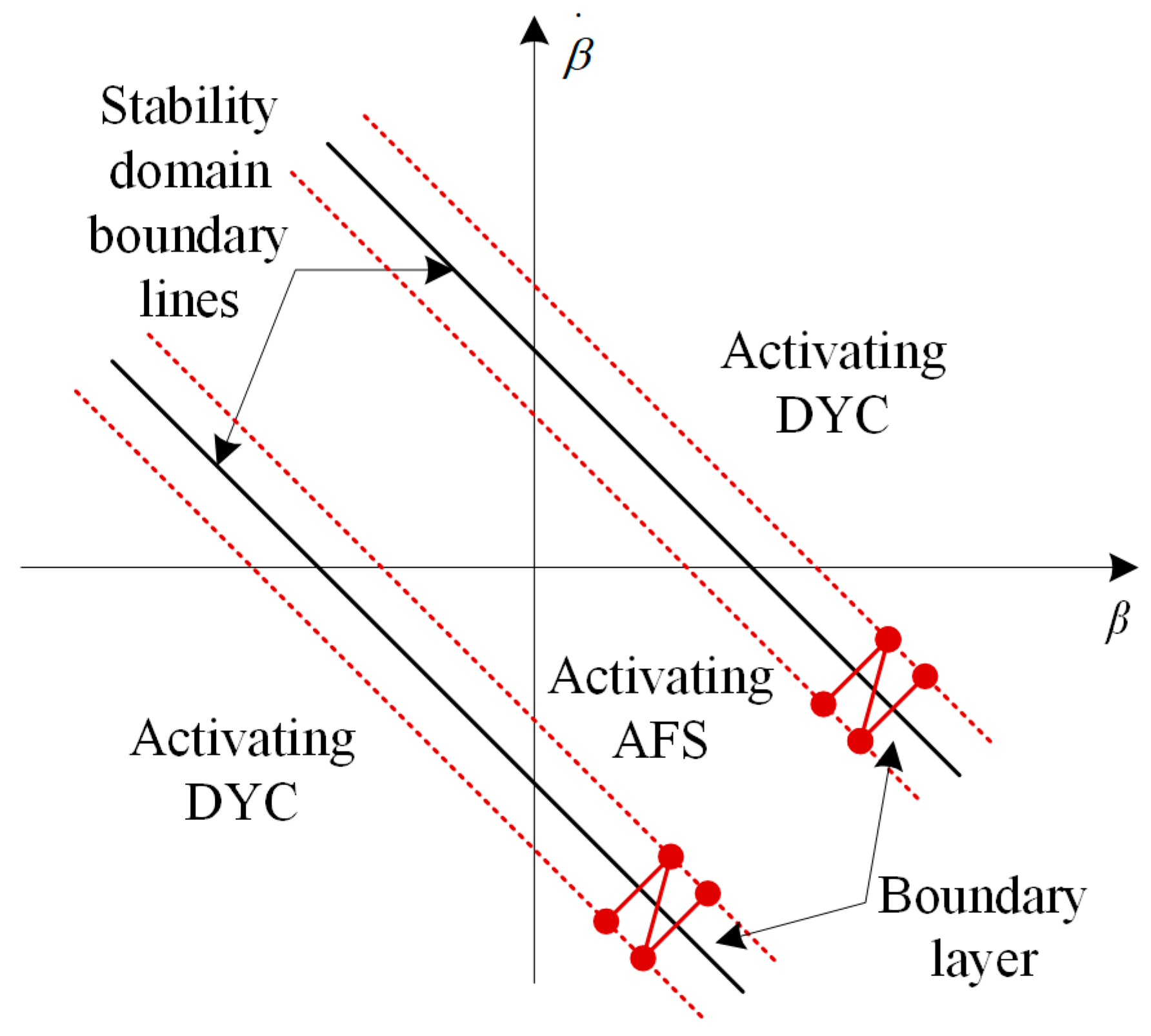
4.3.2. Determination of the Stability Boundary
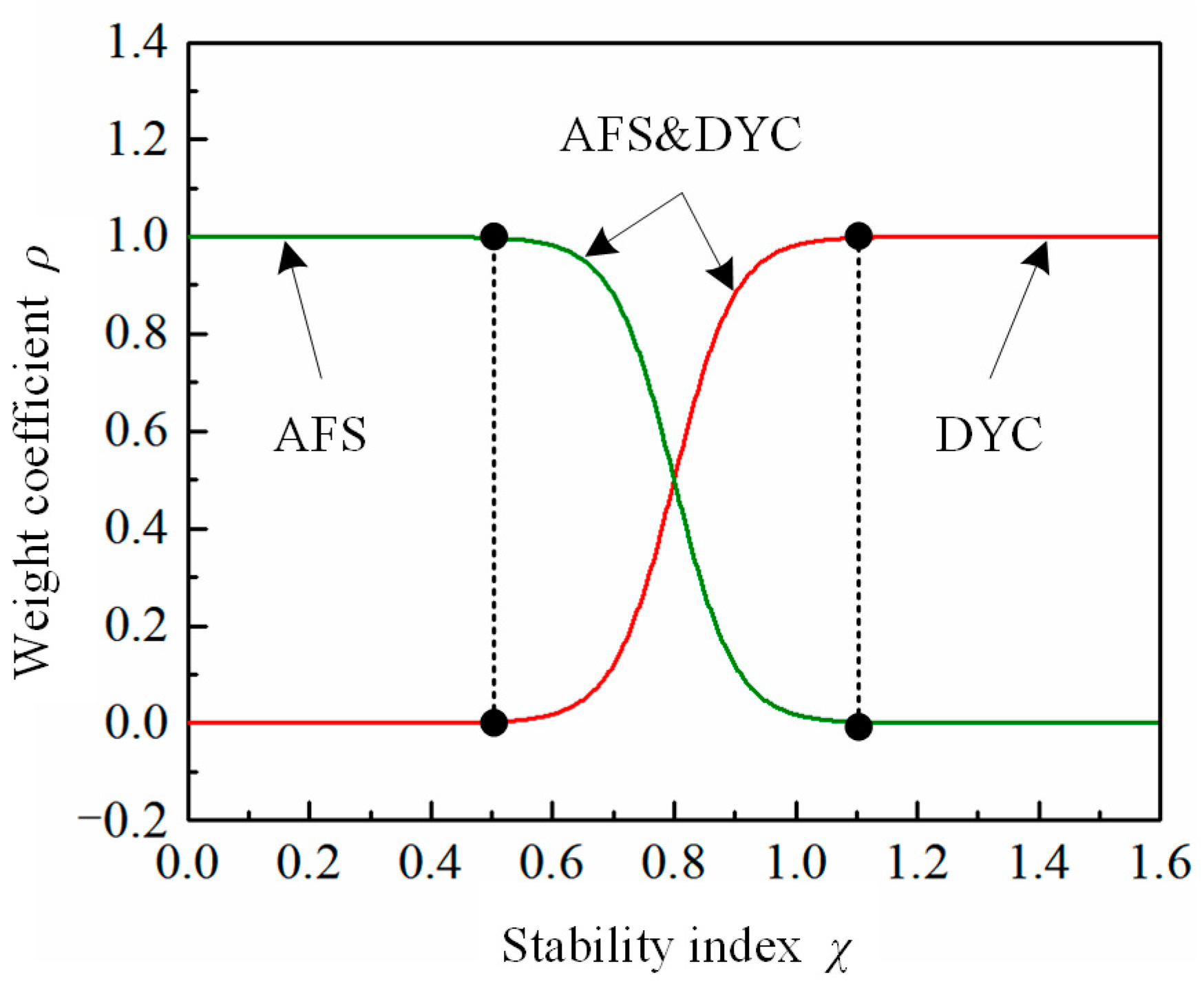
4.3.3. Distribution of Additional Yaw Moment
5. Coordinated Controller Simulation Verification
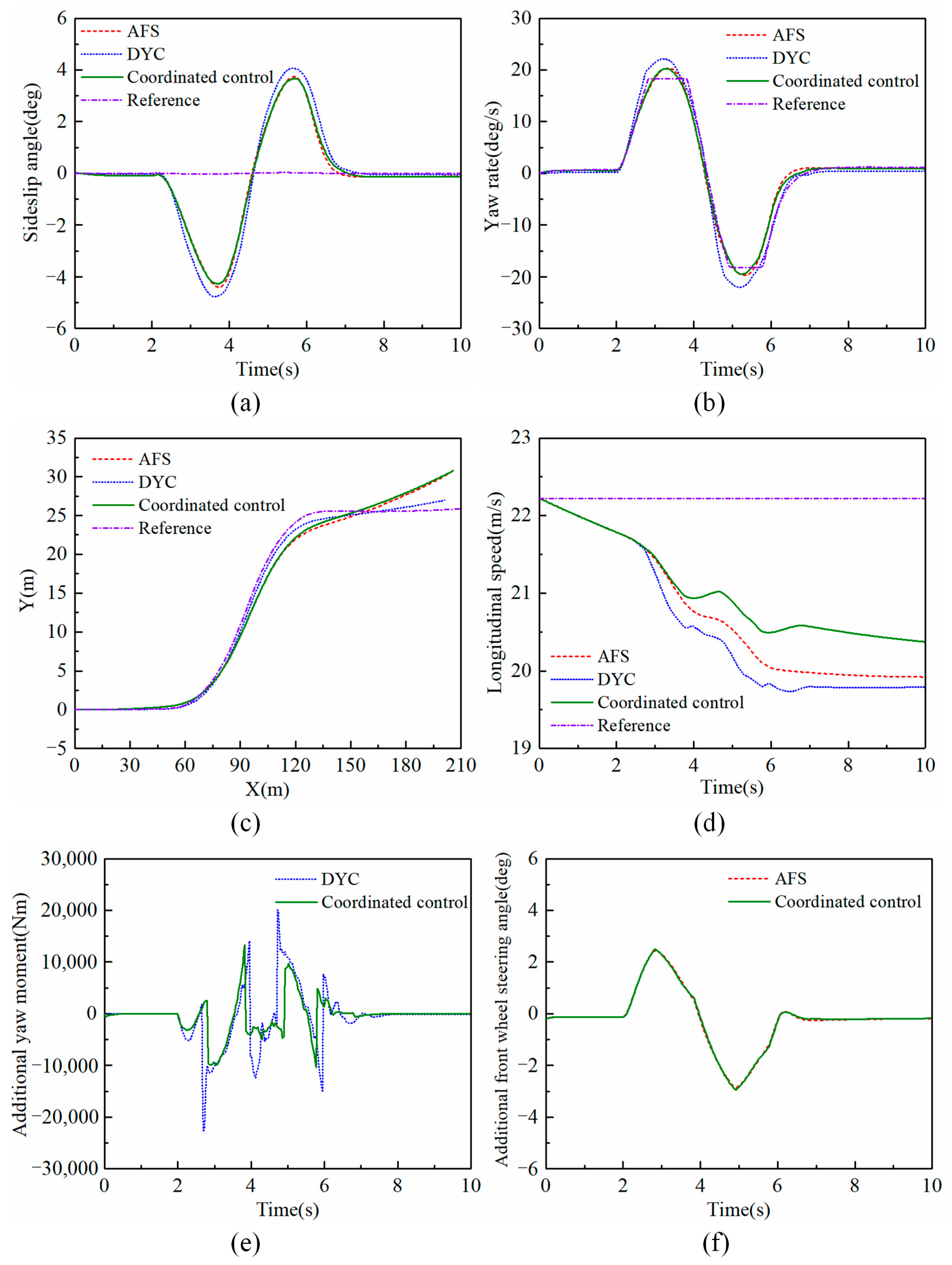
5.1. Maneuver 1: Single Lane Change under Peak Steering Angle 180°
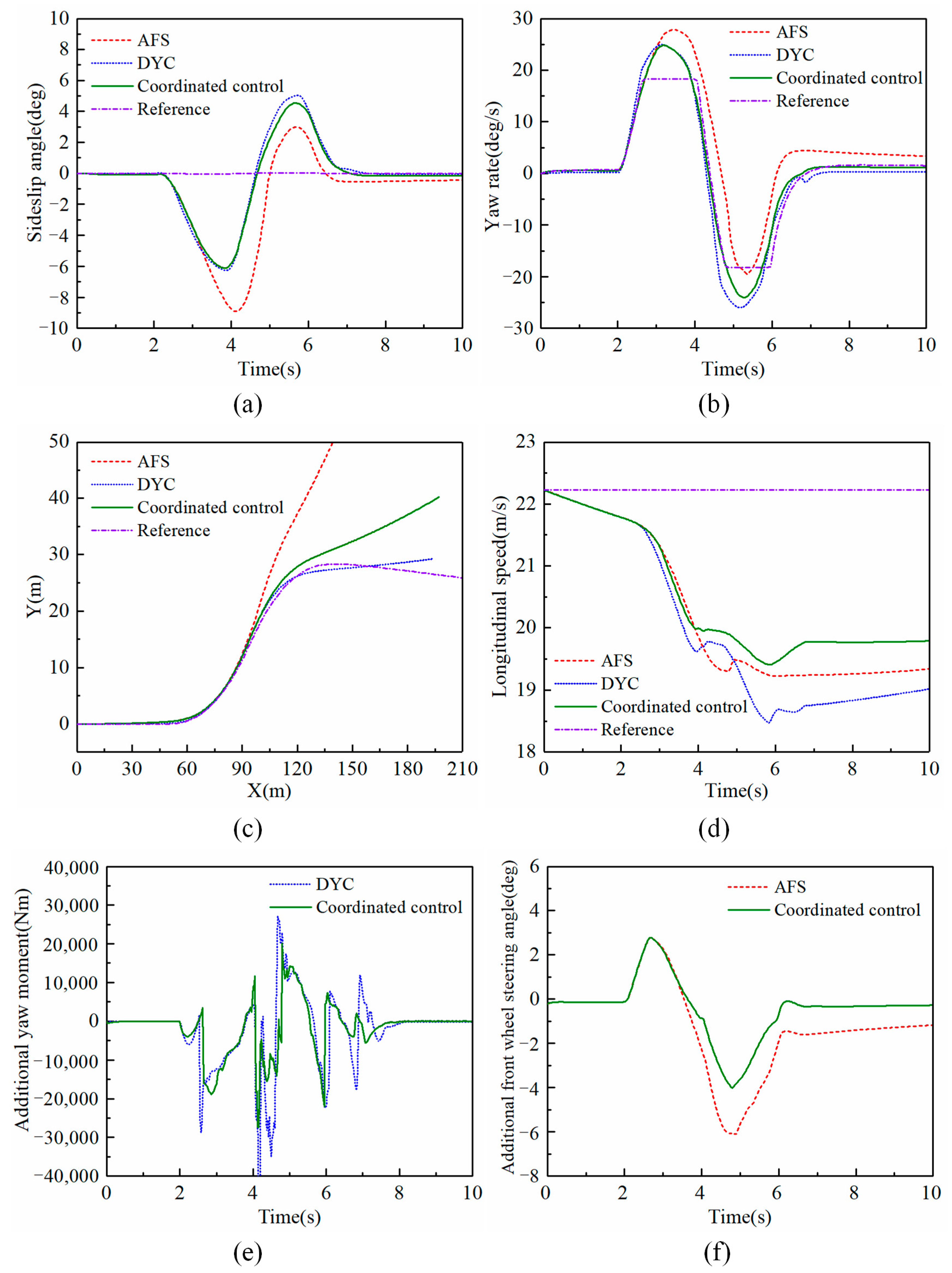
5.2. Maneuver 2: Single Lane Change under Peak Steering Angle 240°
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wu, J.; Cheng, S.; Liu, B.; Liu, C. A Human-Machine-Cooperative-Driving Controller Based on AFS and DYC for Vehicle Dynamic Stability. Energies 2017, 10, 1737. [Google Scholar] [CrossRef] [Green Version]
- Lin, J.; Zou, T.; Zhang, F.; Zhang, Y. Yaw Stability Research of the Distributed Drive Electric Bus by Adaptive Fuzzy Sliding Mode Control. Energies 2022, 15, 1280. [Google Scholar] [CrossRef]
- Xu, H.; Zhao, Y.; Pi, W.; Wang, Q.; Lin, F.; Zhang, C. Integrated Control of Active Front Wheel Steering and Active Suspension Based on Differential Flatness and Nonlinear Disturbance Observer. IEEE Trans. Veh. Technol. 2022, 71, 4813–4824. [Google Scholar] [CrossRef]
- Tian, J.; Wang, Q.; Ding, J.; Wang, Y.; Ma, Z. Integrated Control with DYC and DSS for 4WID Electric Vehicles. IEEE Access 2019, 7, 124077–124086. [Google Scholar] [CrossRef]
- Chen, J.; Guo, C.; Hu, S.; Sun, J.; Langari, R.; Tang, C. Robust Estimation of Vehicle Motion States Utilizing an Extended Set-Membership Filter. Appl. Sci. 2020, 10, 1343. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Ran, X.; Wu, K.; Song, J.; Han, Z. A novel fuzzy logic correctional algorithm for traction control systems on uneven low-friction road conditions. Veh. Syst. Dyn. 2015, 53, 711–733. [Google Scholar] [CrossRef]
- Boada, B.L.; Boada, M.J.L.; Diaz, V. Vehicle sideslip angle measurement based on sensor data fusion using an integrated ANFIS and an Unscented Kalman Filter algorithm. Mech. Syst. Signal Process. 2016, 72–73, 832–845. [Google Scholar] [CrossRef] [Green Version]
- Zhang, F.; Wang, Y.; Hu, J.; Yin, G.; Chen, S.; Zhang, H.; Zhou, D. A Novel Comprehensive Scheme for Vehicle State Estimation Using Dual Extended H-Infinity Kalman Filter. Electronics 2021, 10, 1526. [Google Scholar] [CrossRef]
- Chen, T.; Chen, L.; Xu, X.; Cai, Y.; Jiang, H.; Sun, X. Estimation of Longitudinal Force and Sideslip Angle for Intelligent Four-Wheel Independent Drive Electric Vehicles by Observer Iteration and Information Fusion. Sensors 2018, 18, 1268. [Google Scholar] [CrossRef] [Green Version]
- Melzi, S.; Sabbioni, E. On the vehicle sideslip angle estimation through neural networks: Numerical and experimental results. Mech. Syst. Signal Process. 2011, 25, 2005–2019. [Google Scholar] [CrossRef]
- Hu, J.-S.; Wang, Y.; Fujimoto, H.; Hori, Y. Robust Yaw Stability Control for In-Wheel Motor Electric Vehicles. IEEE ASME Trans. Mechatron. 2017, 22, 1360–1370. [Google Scholar] [CrossRef]
- Song, Y.; Shu, H.; Chen, X.; Luo, S. Direct-yaw-moment control of four-wheel-drive electrical vehicle based on lateral tyre–road forces and sideslip angle observer. IET Intell. Transp. Syst. 2018, 13, 303–312. [Google Scholar] [CrossRef]
- Sun, P.; Trigell, A.S.; Drugge, L.; Jerrelind, J. Energy efficiency and stability of electric vehicles utilising direct yaw moment control. Veh. Syst. Dyn. 2020, 60, 930–950. [Google Scholar] [CrossRef]
- Lu, C.; Yuan, J.; Zha, G.; Ding, S. Sliding Mode Integrated Control for Vehicle Systems Based on AFS and DYC. Math. Probl. Eng. 2020, 2020, 1–8. [Google Scholar] [CrossRef]
- Ahmadian, N.; Khosravi, A.; Sarhadi, P. Driver assistant yaw stability control via integration of AFS and DYC. Veh. Syst. Dyn. 2021, 60, 1742–1762. [Google Scholar] [CrossRef]
- Jin, L.; Gao, L.; Jiang, Y.; Chen, M.; Zheng, Y.; Li, K. Research on the control and coordination of four-wheel independent driving/steering electric vehicle. Adv. Mech. Eng. 2017, 9, 1687814017698877. [Google Scholar] [CrossRef] [Green Version]
- Mousavinejad, E.; Han, Q.-L.; Yang, F.; Zhu, Y.; Vlacic, L. Integrated control of ground vehicles dynamics via advanced terminal sliding mode control. Veh. Syst. Dyn. 2016, 55, 268–294. [Google Scholar] [CrossRef]
- Ma, Y.; Chen, J.; Zhu, X.; Xu, Y. Lateral stability integrated with energy efficiency control for electric vehicles. Mech. Syst. Signal Process. 2019, 127, 1–15. [Google Scholar] [CrossRef]
- Mirzaeinejad, H.; Mirzaei, M.; Rafatnia, S. A novel technique for optimal integration of active steering and differential braking with estimation to improve vehicle directional stability. ISA Trans. 2018, 80, 513–527. [Google Scholar] [CrossRef]
- Ahmadian, N.; Khosravi, A.; Sarhadi, P. Adaptive yaw stability control by coordination of active steering and braking with an optimized lower-level controller. Int. J. Adapt. Control Signal Process. 2020, 34, 1242–1258. [Google Scholar] [CrossRef]
- Hu, X.; Chen, H.; Li, Z.; Wang, P. An Energy-Saving Torque Vectoring Control Strategy for Electric Vehicles Considering Handling Stability Under Extreme Conditions. IEEE Trans. Veh. Technol. 2020, 69, 10787–10796. [Google Scholar] [CrossRef]
- Zhao, H.; Lu, X.; Chen, H.; Liu, Q.; Gao, B. Coordinated Attitude Control of Longitudinal, Lateral and Vertical Tyre Forces for Electric Vehicles Based on Model Predictive Control. IEEE Trans. Veh. Technol. 2021, 71, 2550–2559. [Google Scholar] [CrossRef]
- Jing, C.; Shu, H.; Shu, R.; Song, Y. Integrated control of electric vehicles based on active front steering and model predictive control. Control Eng. Pract. 2022, 121, 105066. [Google Scholar] [CrossRef]
- Huang, W.; Wong, P.K. Integrated vehicle dynamics management for distributed-drive electric vehicles with active front steering using adaptive neural approaches against unknown nonlinearity. Int. J. Robust Nonlinear Control 2019, 29, 4888–4908. [Google Scholar] [CrossRef]
- Ahmadian, N.; Khosravi, A.; Sarhadi, P. Integrated model reference adaptive control to coordinate active front steering and direct yaw moment control. ISA Trans. 2020, 106, 85–96. [Google Scholar] [CrossRef]
- Termous, H.; Shraim, H.; Talj, R.; Francis, C.; Charara, A. Coordinated control strategies for active steering, differential braking and active suspension for vehicle stability, handling and safety improvement. Veh. Syst. Dyn. 2018, 57, 1494–1529. [Google Scholar] [CrossRef]
- Jin, X.; Yu, Z.; Yin, G.; Wang, J. Improving Vehicle Handling Stability Based on Combined AFS and DYC System via Robust Takagi-Sugeno Fuzzy Control. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2696–2707. [Google Scholar] [CrossRef]
- Zhao, H.; Chen, W.; Zhao, J.; Zhang, Y.; Chen, H. Modular Integrated Longitudinal, Lateral, and Vertical Vehicle Stability Control for Distributed Electric Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 1327–1338. [Google Scholar] [CrossRef]
- Liang, Y.; Li, Y.; Yu, Y.; Zheng, L. Integrated lateral control for 4WID/4WIS vehicle in high-speed condition considering the magnitude of steering. Veh. Syst. Dyn. 2019, 58, 1711–1735. [Google Scholar] [CrossRef]
- Ni, J.; Hu, J.; Xiang, C. Envelope Control for Four-Wheel Independently Actuated Autonomous Ground Vehicle Through AFS/DYC Integrated Control. IEEE Trans. Veh. Technol. 2017, 66, 9712–9726. [Google Scholar] [CrossRef]
- Han, Z.; Xu, N.; Chen, H.; Huang, Y.; Zhao, B. Energy-efficient control of electric vehicles based on linear quadratic regulator and phase plane analysis. Appl. Energy 2018, 213, 639–657. [Google Scholar] [CrossRef]
- Liu, W.; Xiong, L.; Leng, B.; Meng, H.; Zhang, R. Vehicle Stability Criterion Research Based on Phase Plane Method. In Proceedings of the WCX™ 17: SAE World Congress Experience, SAE Technical Paper Series, Detroit, MI, USA, 4–6 April 2017. [Google Scholar] [CrossRef]
- Chen, W.; Liang, X.; Wang, Q.; Zhao, L.; Wang, X. Extension coordinated control of four wheel independent drive electric vehicles by AFS and DYC. Control Eng. Pract. 2020, 101, 104504. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Value |
|---|---|---|
| Vehicle mass | m | 7620 kg |
| Distance from CG to front axle | a | 3105 mm |
| Distance from CG to rear axle | b | 1385 mm |
| Wheelbase | d | 2030 mm |
| Yaw moment of inertia | Iz | 30,782.4 kg·m2 |
| Effective radius of wheel | Re | 510 mm |
| Wheel moment of inertia | Jw | 14 kg·m2 |
| Height of CG | hg | 1200 mm |
| Acceleration of gravity | g | 9.8 m/s2 |
| eψ | eβ | ||||
|---|---|---|---|---|---|
| NB | NS | ZO | PS | PB | |
| NB | ZO | PS | PB | PS | ZO |
| NS | NS | ZO | PB | ZO | NS |
| ZO | NB | NB | NB | NB | NB |
| PS | NS | ZO | PB | ZO | NS |
| PB | ZO | PS | PB | PS | ZO |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, J.; Zou, T.; Su, L.; Zhang, F.; Zhang, Y. Optimal Coordinated Control of Active Front Steering and Direct Yaw Moment for Distributed Drive Electric Bus. Machines 2023, 11, 640. https://doi.org/10.3390/machines11060640
Lin J, Zou T, Su L, Zhang F, Zhang Y. Optimal Coordinated Control of Active Front Steering and Direct Yaw Moment for Distributed Drive Electric Bus. Machines. 2023; 11(6):640. https://doi.org/10.3390/machines11060640
Chicago/Turabian StyleLin, Jiming, Teng Zou, Liang Su, Feng Zhang, and Yong Zhang. 2023. "Optimal Coordinated Control of Active Front Steering and Direct Yaw Moment for Distributed Drive Electric Bus" Machines 11, no. 6: 640. https://doi.org/10.3390/machines11060640