1. Introduction
The singular system, also called a differential-algebraic system or an implicit system, has been broadly studied for many years because it is widely applied to describe impulse behaviors in numerous dynamical systems. Some practical systems can be represented as singular systems, such as bio-economic systems [
1], electrical circuit systems [
2], and DC motors [
3]. The impulse behaviors may stop the system from working and are not generally expected to appear. Moreover, the stability analysis of singular systems is more intricate than one of the classical systems because the consideration of the properties as regular and impulse-free is ensured by [
4]. Therefore, the singular system can be stabilized [
5] when the system has a unique solution or a controller eliminates the impulse behavior. Due to the above problem, the stabilization issues of linear singular systems have been investigated by [
6,
7,
8] to achieve, respectively, robust control, passive control, and event-triggered control. In those research studies, the scholars guarantee the admissibility of the systems by the state feedback controller.
In fact, most practical systems are described by complex nonlinear dynamic equations. As is well known, linear control theories can only be used to solve control problems for the local dynamic of nonlinear systems. Therefore, the stability analysis and synthesis of nonlinear singular systems are worth discussing. The Takagi–Sugeno (T-S) fuzzy modeling approach [
9] has been widely applied to represent complex nonlinear dynamics. With the T-S fuzzy model, linear control theories can solve the stability problems of nonlinear systems [
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22]. According to the T-S fuzzy modeling approach, the nonlinear singular systems are separated into several linear subsystems through the fuzzy sets and IF–THEN rules. To deal with the control problem of T-S Fuzzy Singular Systems (T-SFSS) in [
10,
11,
12], a fuzzy controller was designed using the Parallel Distributed Compensation (PDC) technique [
13]. The concept of PDC is that the fuzzy controller is constructed with the same membership function as the model. Moreover, some uncertainties have naturally arisen when modeling errors or aging components have occurred. Uncertainty usually brings inaccurate signal transmission and poor control performance. Therefore, the robust control issue is always investigated to guarantee the stability of systems with admissible uncertainty. In addition, the external disturbance effect on systems is usually caused by external factors that lead to instability. Thus, the issues with robust control and passive control cannot be easily ignored for practical operation. To deal with the problem caused by external disturbance, passivity theory [
14,
15,
16,
17] is applied to achieve attenuation of the effect of disturbance.
For the practical control problem [
23,
24,
25,
26], the full states of physical systems are not always measurable. Thus, observer theory [
27,
28,
29] provides an effective approach for estimating unmeasured states. To discuss the stability analysis of T-SFSS, the observer-based controller design method, such as state feedback and output feedback for T-SFSS, was also investigated in [
29,
30,
31,
32]. According to the above methods [
29,
30,
31], two portions were proposed to discuss the admissibility of T-SFSS. The first portion is for ensuring that the considered system is regular and impulse-free, and the other portion is for analyzing the stability of the considered systems. To reduce the procedure of ensuring the admissibility of T-SFSS, the Proportional Derivative (PD) control method was applied in [
11,
12,
33,
34,
35]. Referring to Remark 1 of [
34], one can realize that the derivative state of the PD controller can mainly eliminate the singularity of singular systems. Therefore, the Observer-Based PD (OBPD) fuzzy controller design method was developed in [
36,
37] for T-SFSS. However, there is conservatism in the positive definite matrix chosen by [
36]. In the literature [
36], the positive definite matrix is limited to a diagonal case so that stability conditions can be successfully transferred into the Linear Matrix Inequality (LMI) form. Apparently, the limitation increases conservatism in the calculation seeking feasible solutions. Thus, an important issue for decreasing the conservatism of stability conditions is investigated in this paper.
According to the above motivations, a relaxed OBPD fuzzy controller design method is proposed such that the uncertain nonlinear singular system with external disturbances achieves asymptotical stability and passivity. Based on the T-S fuzzy modeling method, the nonlinear singular system is represented by uncertain T-SFSS with external disturbances. To reduce the complexity of discussing the admissibility of the considered system, the OBPD fuzzy controller is designed by using the PDC concept. In addition, the stability conditions are converted into LMI form by the Schur complement, projection lemma [
38], and the Singular Value Decomposition (SVD) [
29] technique. Then, the conditions can be effectively calculated by a convex optimization algorithm [
39] to find the controller gains and the observer gains. The main contributions of this paper can be summarized as follows: (1) The proposed control design method is more realistic than [
36] because the perturbations and external disturbances are considered, and (2) the stability conditions of this paper are more relaxed than [
36] because the positive definite matrix in this paper is not required to be a diagonal case. Finally, two examples are applied to demonstrate the effectiveness of the proposed control method.
This paper is organized as follows. In
Section 2, the uncertain nonlinear singular system with external disturbances is represented by the T-S fuzzy model. In
Section 3, some sufficient conditions for the considered system are derived. In
Section 4, two examples are applied to illustrate the applicability of the proposed control method. In
Section 5, the conclusion is given for this paper.
Notation: represents the identity matrix with approximate dimension. represents the null-space matrix of . denotes the orthogonal matrix. and represent the -dimensional vector and the -dimensional matrix, respectively. denotes the shorthand of . denotes the symmetric term in the matrix. denotes the shorthand of , and denotes the shorthand of . denotes the rank of . represents the -dimensional matrix.
2. System Descriptions and Problem Statements
In this section, the complex nonlinear singular system considered with uncertainty and external disturbance is expressed by the following uncertain T-SFSS with external disturbances.
Plant Rule i:
IF
is
and … and
is
, THEN
where
are the premise variables;
is the fuzzy set;
is the number of premise variables;
and
are the number of rules;
is the state vector;
is the control input vector;
is the external disturbance vector;
is the measured output vector; and
is the output vector.
,
,
,
,
, and
are constant matrices.
is a constant matrix with
.
,
, and
are the unknown matrices expressing uncertainties, which are represented as
,
, and
in the following context for simplicity and are constructed as
where
,
,
,
,
, and
are real constant matrices with appropriate dimensions and
is the unknown time-varying function satisfying
.
Furthermore, the overall T-S fuzzy model is constructed as follows:
where
,
,
and
is the grade of the membership of
in
.
For simplification, is defined in the following context. For unmeasurable states, the PD fuzzy observer is constructed as follows:
Observer Rule i:
IF
is
and … and
is
THEN
where
is the estimated state vector and
is the estimated output vector. The matrices
and
are the observer gains. Then, the overall fuzzy observer can be further expressed as follows:
Based on the concept of PDC, the OBPD fuzzy controller is constructed in the following form.
Controller Rule i:
IF
is
and … and
is
THEN
where
and
are controller gains. Then, the overall fuzzy controller can be represented as follows:
The following assumptions are given to ensure the stability issue of System (3). Assumption 1 is to ensure the observability and controllability of System (3). For convenience, we assume that the output matrix can be represented by SVD in Assumption 2.
Assumption 1 [36]. System (3) is completely controllable and completely observable if the following equalities are satisfied:
where
,
is the open right half of the complex plane. □
Assumption 2 [29]. If the matrixhas full row rank, the singular value decomposition of matrix is described as
where
and
are orthogonal matrices and
is a diagonal matrix with positive diagonal elements. □
In defining the estimation error function
, the following relationship is easily derived by using (3a) and (5a):
Based on (3a) and (8), the following augmented system can be directly inferred:
The following equation can be further obtained by organizing (9):
where
,
,
,
,
,
,
,
,
,
,
,
and
.
Based on Assumption 1,
is rendered full rank and invertible with controller gain
and observer gain
. Therefore, one can find the following equation from (10):
According to (11), the regularity and nonimpulsiveness of (10) can be certainly guaranteed by and .
To attenuate the disturbance effect on the system, Definition 1 for passivity is proposed.
Definition 1 [17]. If there exist the given constant matrices , , and
satisfying the following inequality, then the system is passive with the external disturbance and output for all terminal time :
□
Furthermore, an effective method for dealing with perturbations in the augmented system (10) is provided as follows.
Lemma 1 [11]. Given real appropriate dimension matrices, , and withand a scalar , one can find the result as follows:
□
In order to convert the stability conditions into LMI form, the following lemma is provided.
Lemma 2 [38].
Given the matrices,
and symmetric matrix that satisfy
and
,
if and only if there exists any matrix
such that
then the following inequalities are held:
where
and
are the null-space matrices of
and
, respectively. □
3. Stability Conditions Derivation for the T-S Fuzzy Singular System
In this section, the stability criterion for the closed-loop system (11) is proposed to guarantee asymptotical stability and passivity. Furthermore, the derived conditions are converted into LMI form.
Theorem 1. Given the matrices,, and
, the closed-loop system (11) is asymptotically stable and passive if there exist the matrices
,
,
,
,
, and
, and a scalar such that the following stability conditions are satisfied:
where
,
,
,
,
,
,
and
.
Proof. Let us choose the following Lyapunov function: Based on the augmented system (11), the following derivative of the Lyapunov function (16) is inferred:
For nonzero external disturbance, that is,
, the following performance function is defined with zero initial condition:
where
Substituting (3b) and (17) into (19), one can obtain
where
.
According to the assumptions
and
, Condition (15) can be rewritten as the following inequality:
Applying Lemma 1, the following inequalities can be obtained from (21):
Therefore, one can find that the following inequality can be satisfied by (21) and (22):
where
and
.
The inequality (23) can also be rewritten as follows:
where
,
and
.
According to Lemma 2, the following inequalities can be obtained from (24):
where
and
. Based on the definitions
,
and
, the inequalities in (25) can be directly formulated as the following equations:
and
Obviously, if Condition (15) of Theorem 1 is held,
and
can be guaranteed. Furthermore,
implies
such that
is obtained from (20). Therefore, passive performance of the closed-loop system (11) is achieved by satisfying Condition (15). To analyze the stability of the closed-loop system (11), the following inequality can be obtained from (19) with
and by assuming
:
Since , can be directly inferred by (27), the system (11) is asymptotically stable and passive due to satisfying Condition (15). The proof of Theorem 1 is completed. □
However, the stability condition in Theorem 1 cannot be directly calculated by the convex optimization algorithm owing to the existence of bilinear terms. To apply the convex optimization algorithm, Condition (15) is converted into LMI problems by the Schur complement and Assumption 2 in the following theorem:
Theorem 2. Given the matrices,
,
,
,
,
and a scalar , the closed-loop system (11) is asymptotically stable and passive if there exist matrices
,
,
,
,
,
,
,
and a scalar such that
where
,
,
,
,
,
,
,
and
.
Proof. Applying the Schur complement to (15), one can find the following inequality:
where
,
and
.
By pre- and postmultiplying
and its transposed matrix on (29), the following inequality can be inferred by defining
and
:
where
,
,
,
,
,
,
,
,
,
,
and
.
To convert the above elements into linear variables such that (30) becomes LMI form, the following relationship can be derived according to Assumption 2. Note that
and
are the orthogonal matrices:
where
.
Based on (31), the following inequality can be obtained from (30):
where
and
.
By defining and , the condition of this theorem can be obtained from (32). In addition, the inequality (32) is equivalent to the condition of Theorem 2. The proof of Theorem 2 is completed. □
Obviously, if the feasible solutions satisfy Conditions (28) in Theorem 2, Theorem 1 can also be held by those solutions. Based on the obtained solutions, the gains , , and are found to establish the OBPD fuzzy controller (7).
Remark 1. In many existing papers [33,34,35], the PD control schemes have validated efficiency in the control of singular systems. However, only a few works focus on the observer-based PD control method. Although the T-S fuzzy-model-based OBPD controller was developed in [36,37], the effect of the external disturbance has not been considered. Existing papers [10,32,34] show that the singular system with disturbance is also a critical control issue. Therefore, a stability analysis process has been successfully developed in Theorem 1 to solve the control problems of both uncertainty and disturbance in the nonlinear singular systems. In addition, the stability conditions are efficiently transferred into the LMI form in Theorem 2 by applying some derivation methods. 4. Simulation Results
According to the proposed OBPD fuzzy controller design method, the control problems of nonlinear singular systems with uncertainties and disturbances can be solved simultaneously. In this section, the simulation results of two examples are provided to verify the applicability and effectiveness of the design method.
Example 1. In the first example, a numerical system is applied to provide the comparison results between [29] and the proposed method. To begin the simulation, the nonlinear system with uncertainties and external disturbances is presented as follows:
where
and
are the control input and the external disturbance of the system, respectively, and
is the parameter uncertainty. Note that the derivative of
is assumed to satisfy
and
. Referring to [
29], the state variables are selected as
with
,
, and
. Then, System (33) can be further expressed in the following nonlinear singular system with the parameters set by
,
and
:
In System (34), the uncertainty
is selected in the same manner as [
29]. Note that the uncertain variable
is considered a random number that is distributed from −1 to 1. To provide the comparison results, the uncertain variable is selected as
for the simulation. Thus, the corresponding singular T-S fuzzy model for (34) can be obtained as follows with the effects of uncertainty and disturbance:
where
,
,
,
,
, and
,
,
,
for
. As with [
29], the uncertain matrices are also given in the form of
,
,
. Because [
24] has not considered the uncertainty of the external disturbance signal, the matrix
is selected. For Model (35), the membership functions are designed as
,
,
,
and
. Moreover, the uncertain matrices can be constructed via (2) with the following matrices:
Setting the parameters
,
,
, and
, the following gains can be obtained by solving Conditions (28) in Theorem 2 with the convex optimization algorithm:
Moreover, by setting the parameter setting
for the design method in [
29], the following gains of [
29] can be obtained without considering the time-delay effect:
In the design method [
29], the observer-based fuzzy controller is designed only with proportional state feedback. It is worth noting that the OBPD fuzzy controller in this paper can solve the stability analysis problem of the singular T-S fuzzy model more efficiently. Then, the observer-based fuzzy controller is given for [
29] as follows:
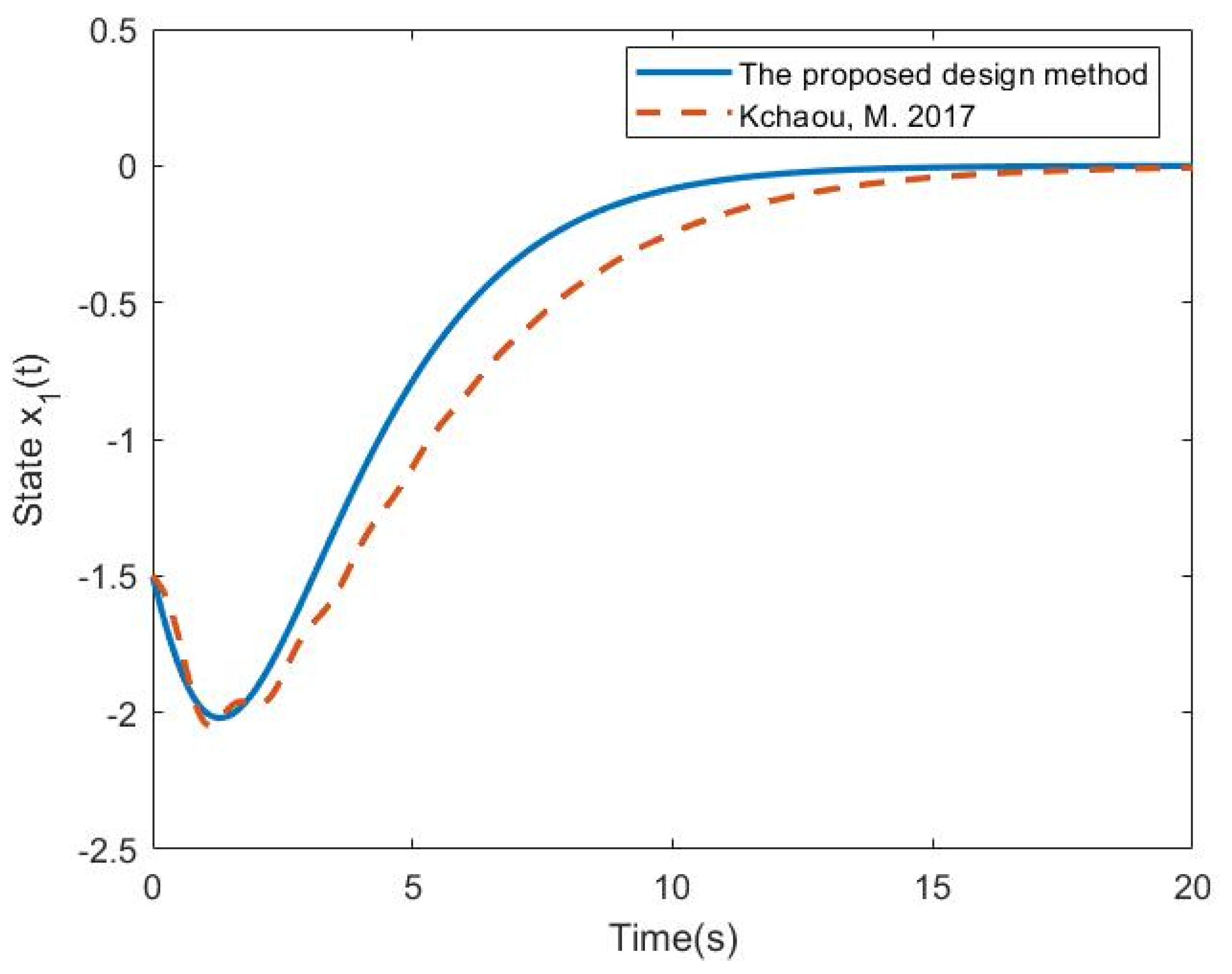
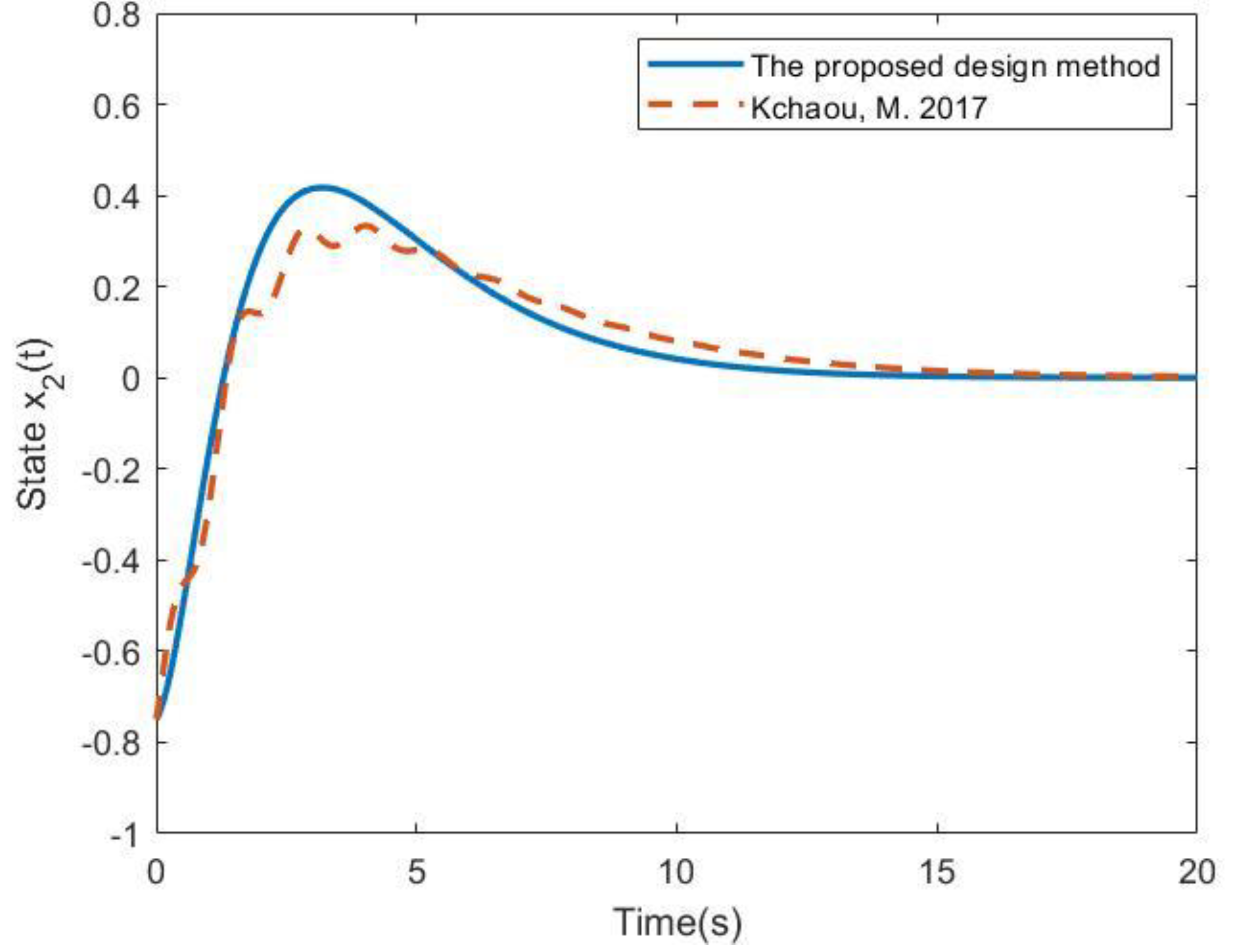
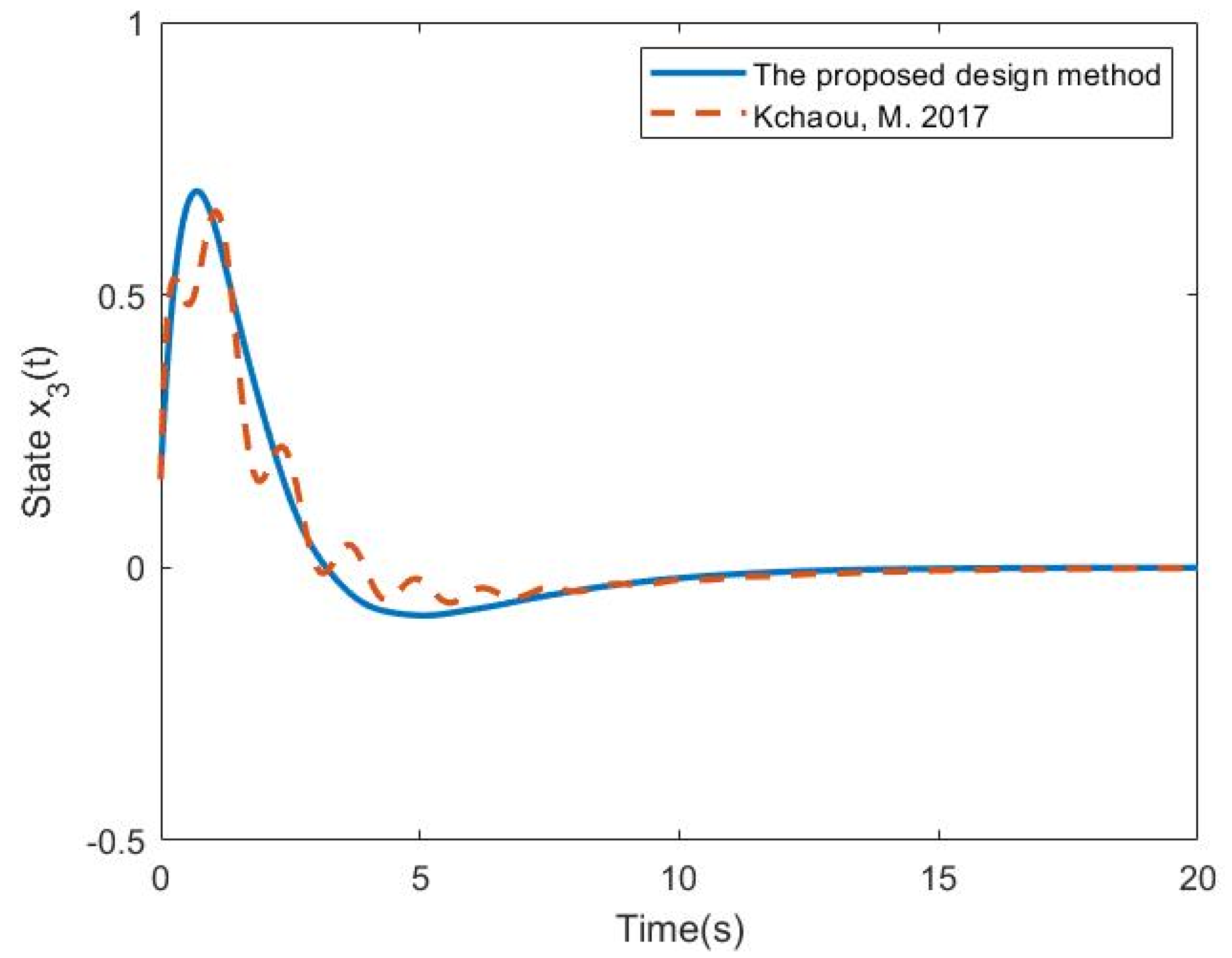
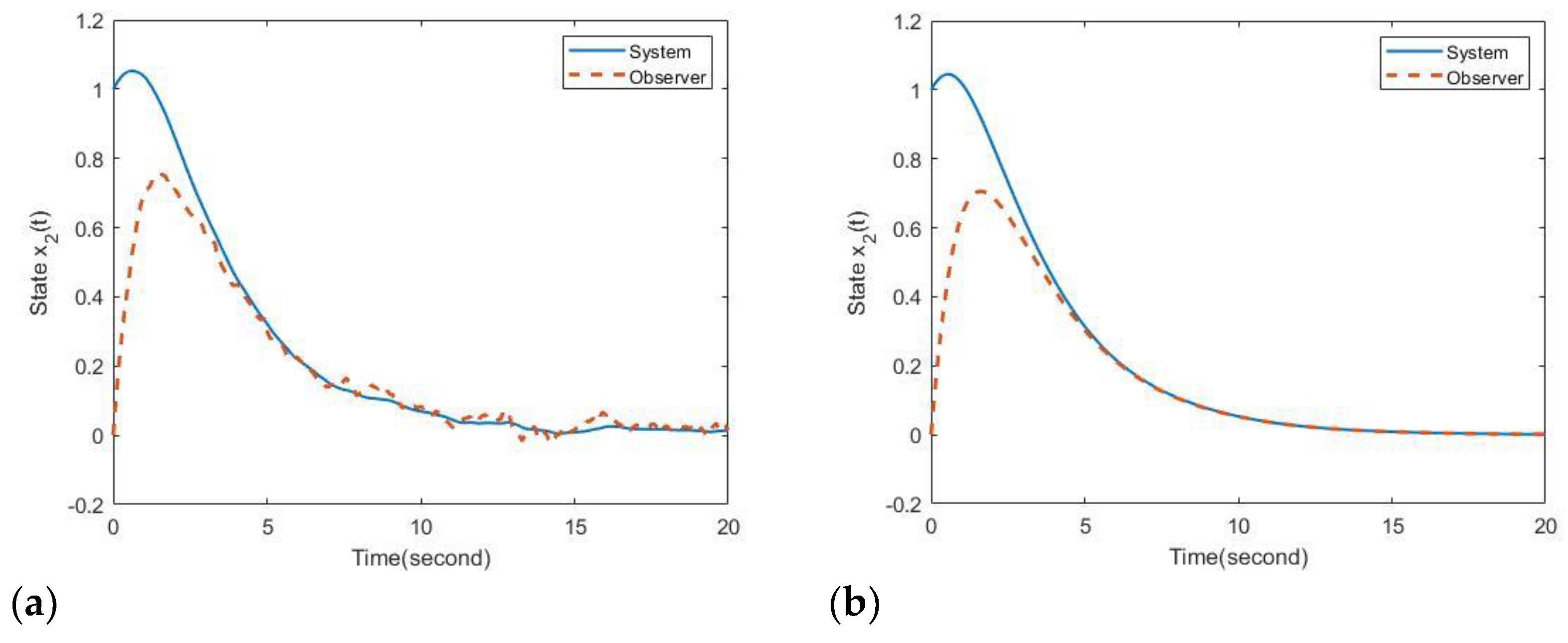
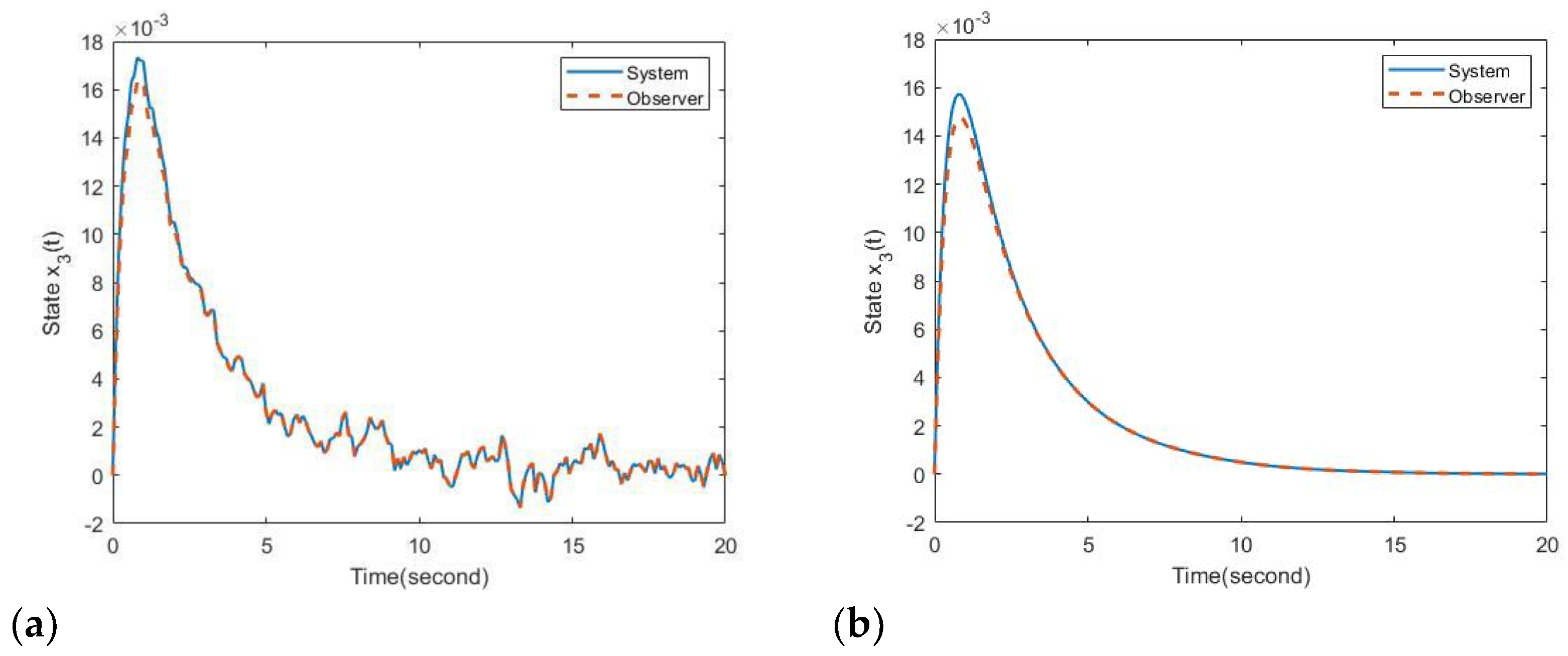
Given the initial conditions
and
, the state responses of the nonlinear singular system (34) are obtained in
Figure 1,
Figure 2 and
Figure 3 by applying the OBPD Fuzzy Controller (7) with Gains (36) and Fuzzy Controller (38) with Gains (37), respectively. The figures show that the settling time obtained by the proposed design method is much better than the method in [
29] despite the overshoot being slightly bigger. In order to verify the passive performance introduced in Definition 1, the following value is obtained based on the simulation results:
According to Definition 1, with the setting of matrices , , and , it is obvious that the value in (39), which is smaller than 1.111, successfully satisfies the passive constraint in (12). That is, the attenuation performance of System (34) can be achieved with the external disturbance input energy. Because the passive constraint in (12) is satisfied, one can also see that the smoother responses of the system in (34) can be guaranteed by applying the fuzzy controller in (7).
Based on the comparison results in Example 1, it can be said that the proposed OBPD fuzzy controller design method can provide better control performance for the nonlinear singular system. Moreover, a more efficient stability analysis process can also be developed with the construction of a PD state feedback controller.
Example 2. The effectiveness of the proposed design method has been verified in Example 1. To further demonstrate the applicability and feasibility, the simulation results of a single-species bio-economic system are presented in the second example. Referring to [1], the following nonlinear system can be given by considering the economic interest of harvest effort in an immature population:
where
,
and
.
and
, respectively, represent the population density of juvenile species and adult species;
represents a policy for adjusting the tax;
represents price constant per the individual population;
represents the cost coefficient; and
represents the economic interest of harvesting. Referring to [
1], it is known that the bio-economic system has an equilibrium when
. More detail on the physical meaning of system parameters can be found in [
1].
According to [
1], the operating points are chosen as
, and the system coefficients are selected as
,
,
,
,
,
, and
. To obtain more precise control performance, the problem of modeling error is also considered as the uncertain factor in the system. Then, the following T-S fuzzy model in (40) can be constructed:
where
,
,
,
,
,
,
,
for
,
,
,
,
,
and
. The membership functions of the fuzzy model in (41) are considered as
and
. To develop the proposed design method, the following matrices are selected for uncertainties in the form of (2):
By setting the matrices
,
,
, and
, the following gains can be obtained by solving Conditions (28) of Theorem 2:
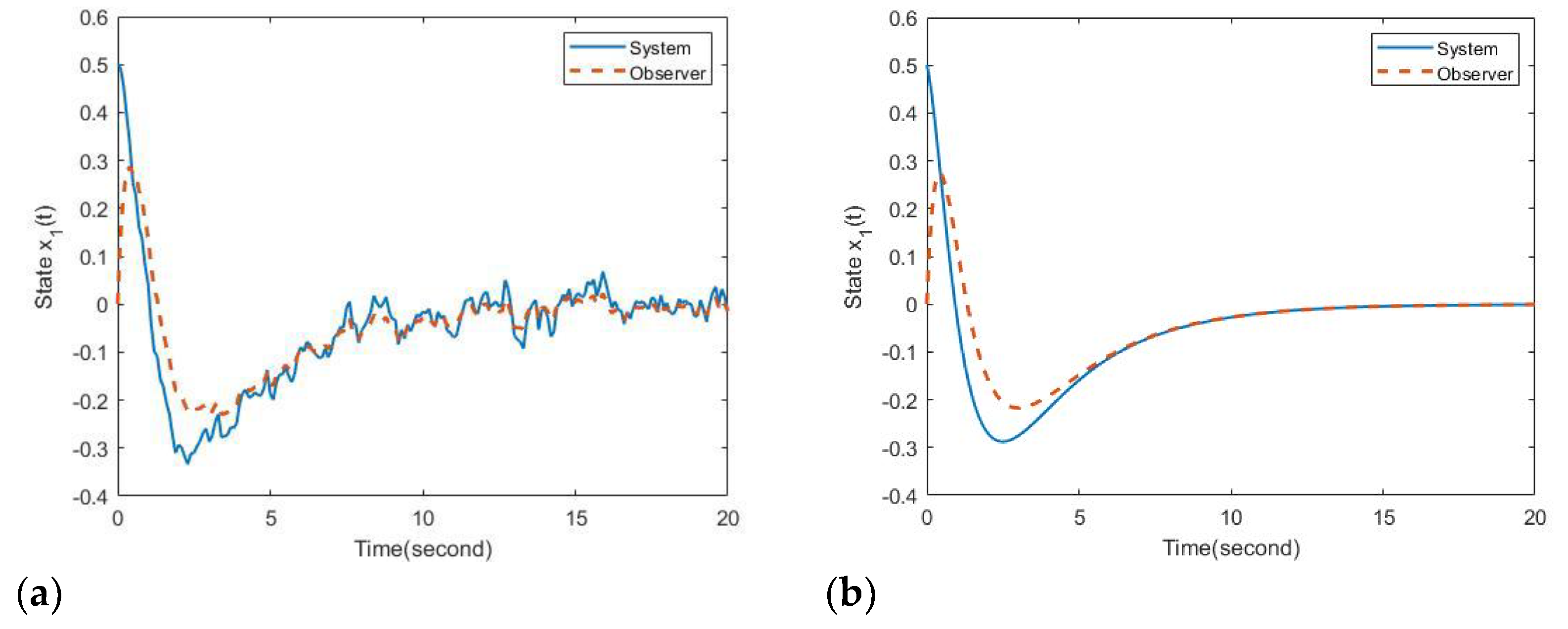
Based on the obtained gains, the proposed OBPD fuzzy controller in (7) can be designed for the nonlinear system in (40). The state responses of (40) are provided in
Figure 4,
Figure 5 and
Figure 6 with the initial conditions
and
. Based on the simulation results, the following value is also obtained to verify passive performance:
Because the value of (43) is smaller than , the constraint (12) of Definition 1 is satisfied, and the requirements of passivity are achieved. This means that even under the effect of the disturbance, the control performance also can be guaranteed for the system (40).
Referring to the figures, one can find that the stability of (40) is achieved by the proposed OBPD fuzzy controller (7). Moreover, the fuzzy observer can also successfully estimate the actual states. Based on the definition of state variables, the convergence of the bio-economy system in (40) means that all states can be controlled to a positive equilibrium. This result also indicates that the species population is guaranteed to be not endangered. Furthermore, government policy can efficiently adjust taxes to increase or decrease the cost of harvesting based on the proposed design method to achieve the sustainable development of bio-economic systems in (40). Thus, the proposed OBPD fuzzy controller design method can provide a valid choice for the control of numerical and practical nonlinear singular systems.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





