
Interleaving Modulation Schemes in Asymmetrical Dual Three-Phase Machines for the DC-Link Stress Reduction

Abstract
:1. Introduction
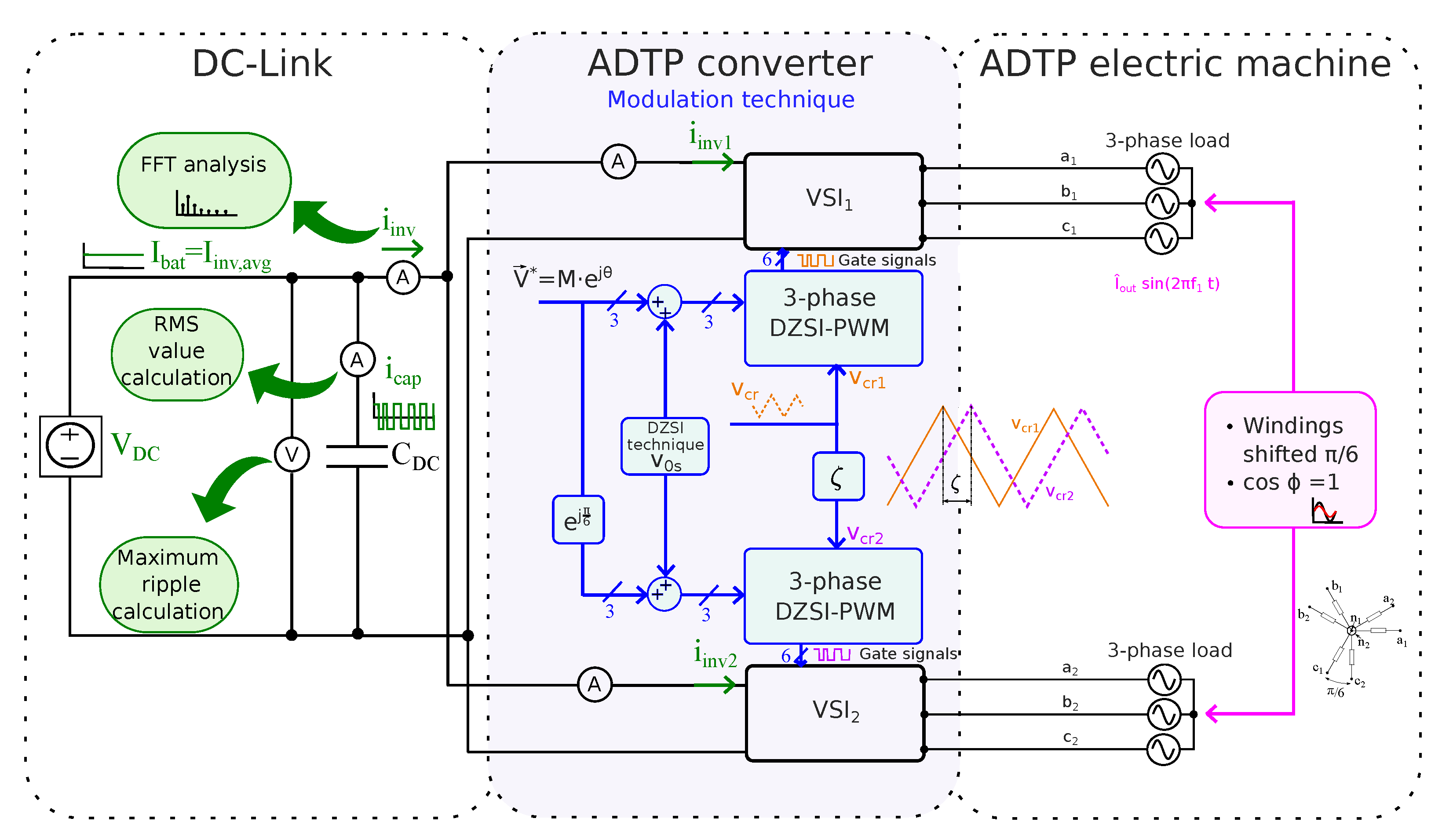
2. DC-Link Capacitor Current and Voltage Stress in Asymmetrical Dual Three-Phase Inverters
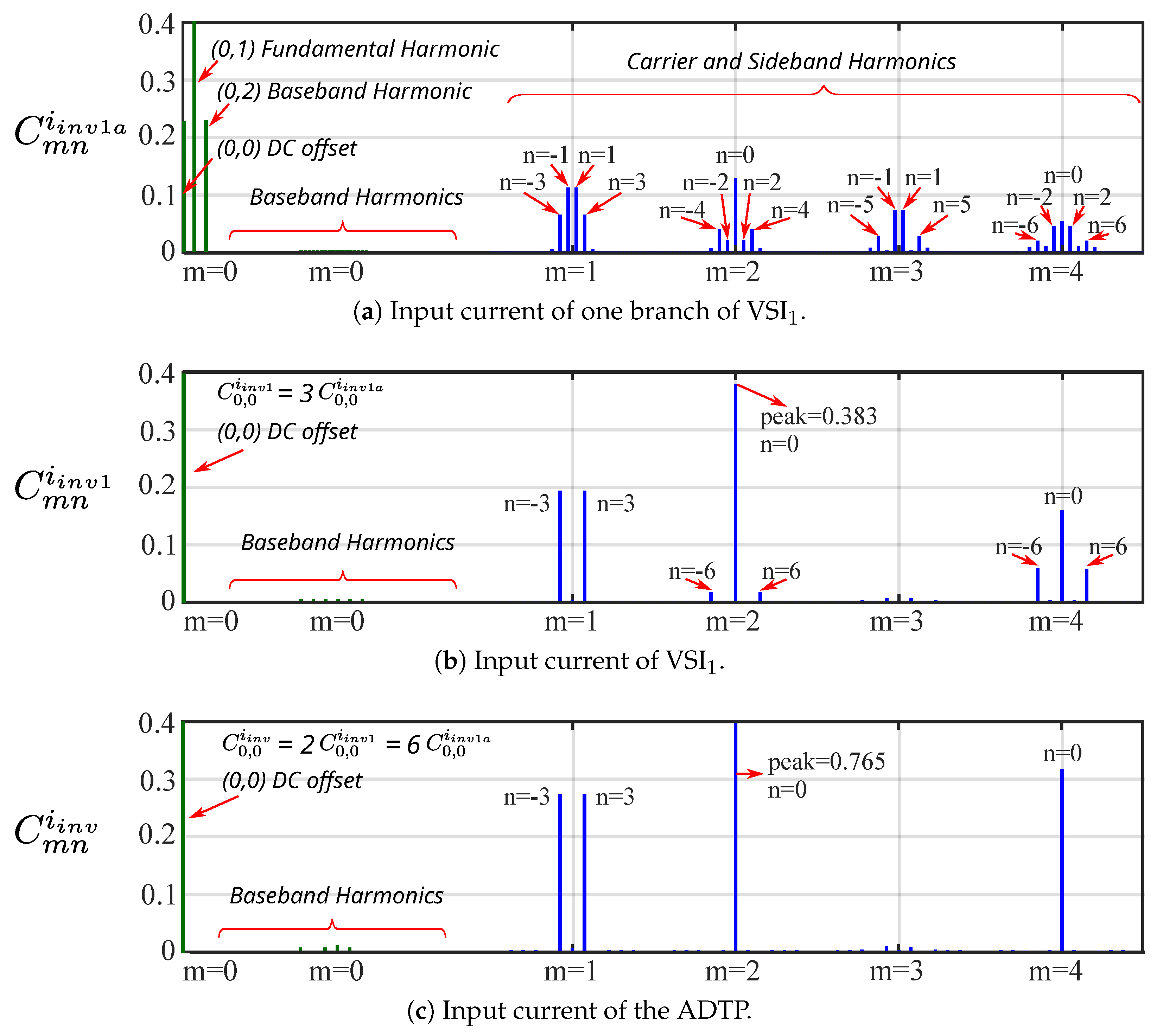
2.1. Current Spectrum Theoretical Basics for an ADTP Inverter
2.1.1. Input Current of One Branch of VSI1 ()
2.1.2. Input Current of VSI1 ()
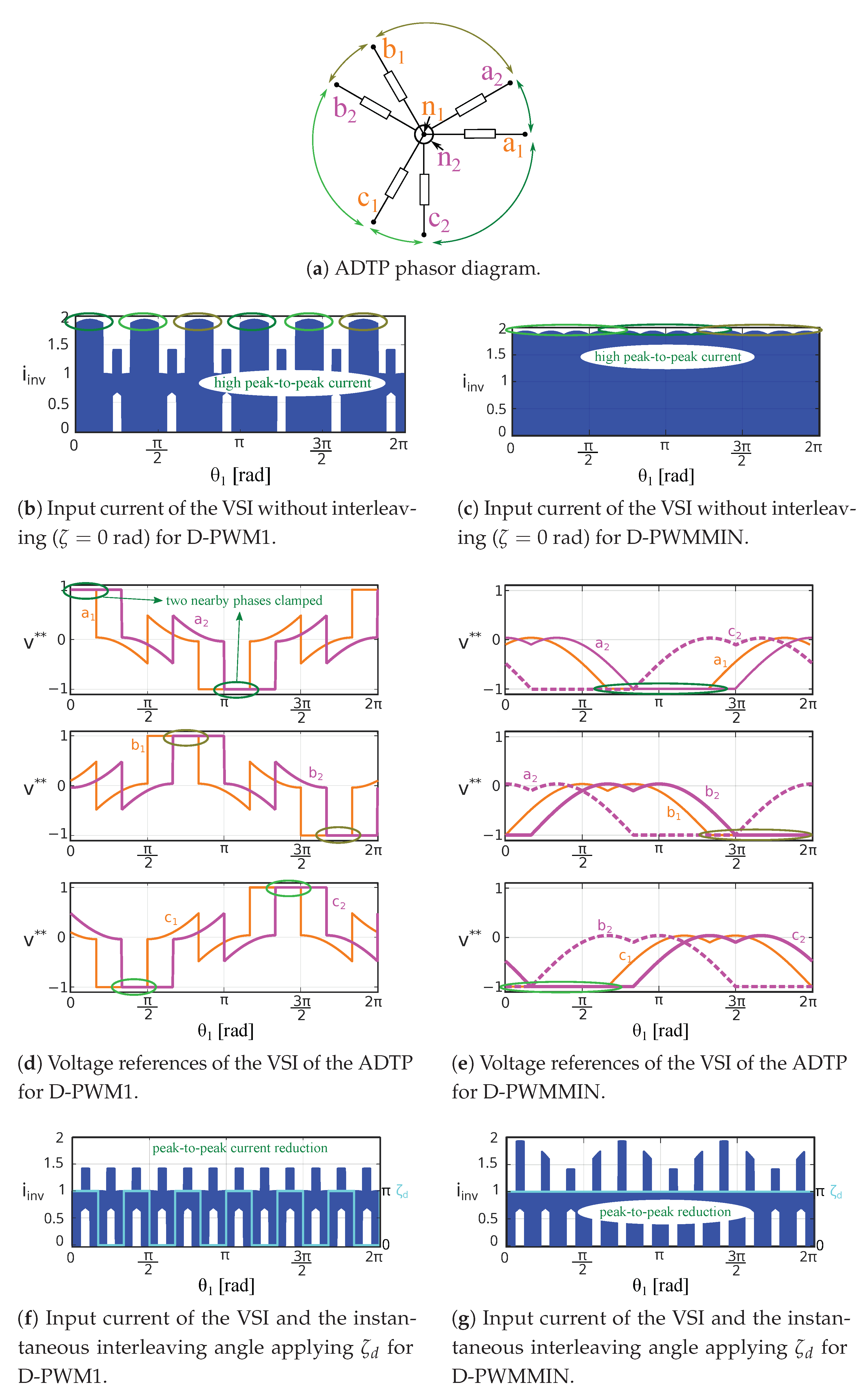
2.1.3. Input Current of ADTP ()
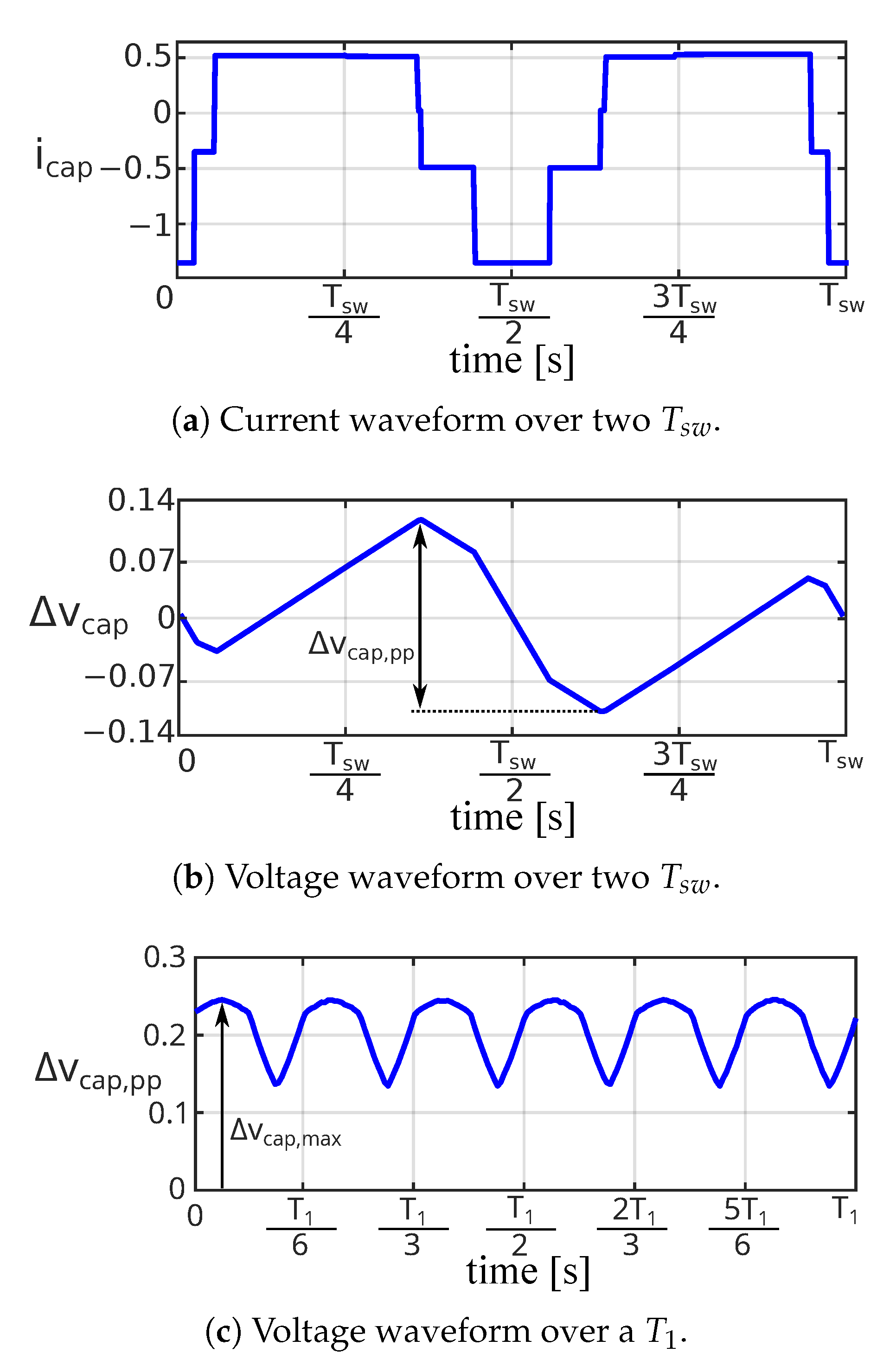
2.2. Definition of RMS Current and Voltage Ripple in DC-Link Capacitor
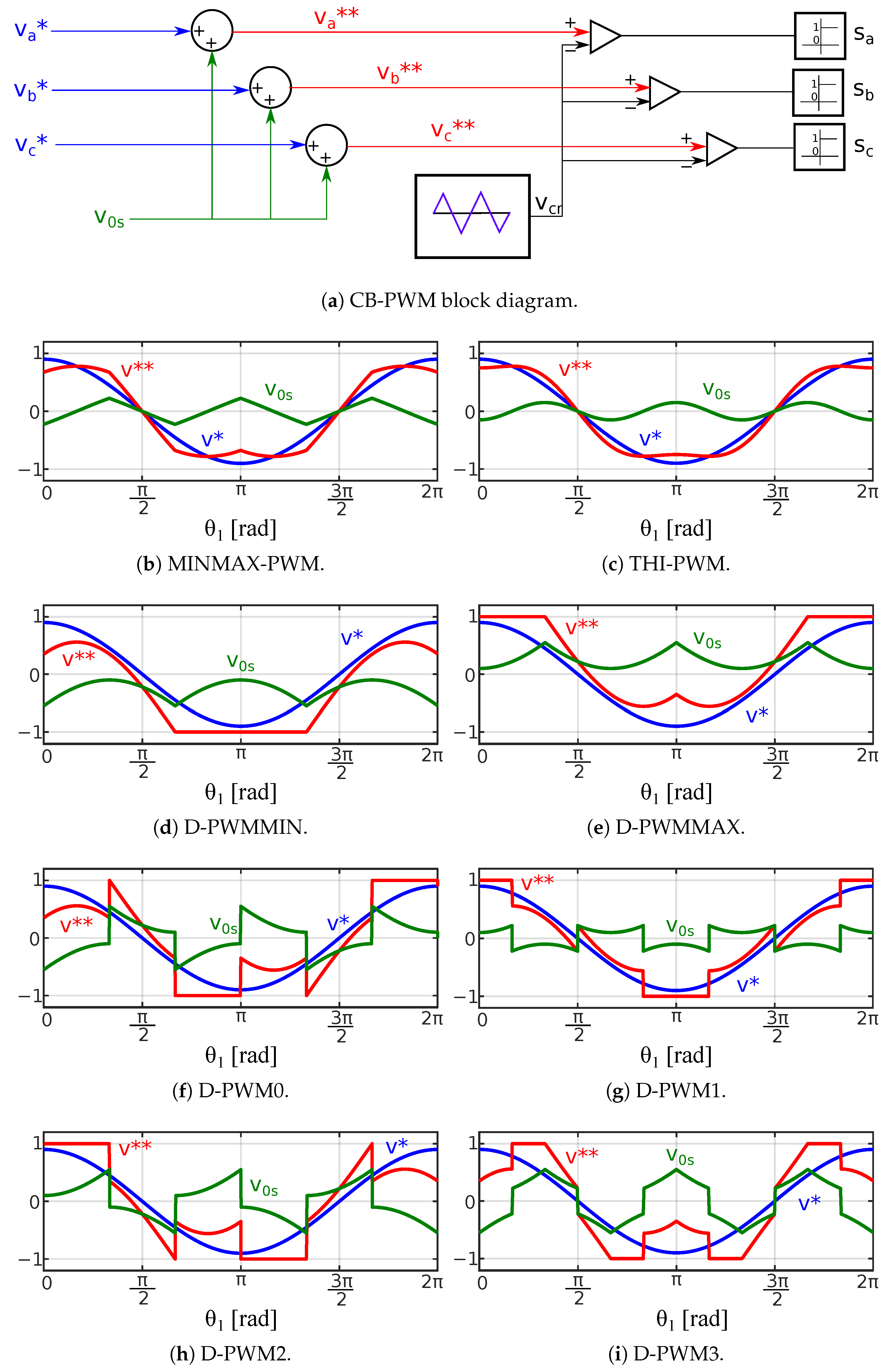
3. Influence of the Modulation Technique on the Input Current Harmonic Spectrum
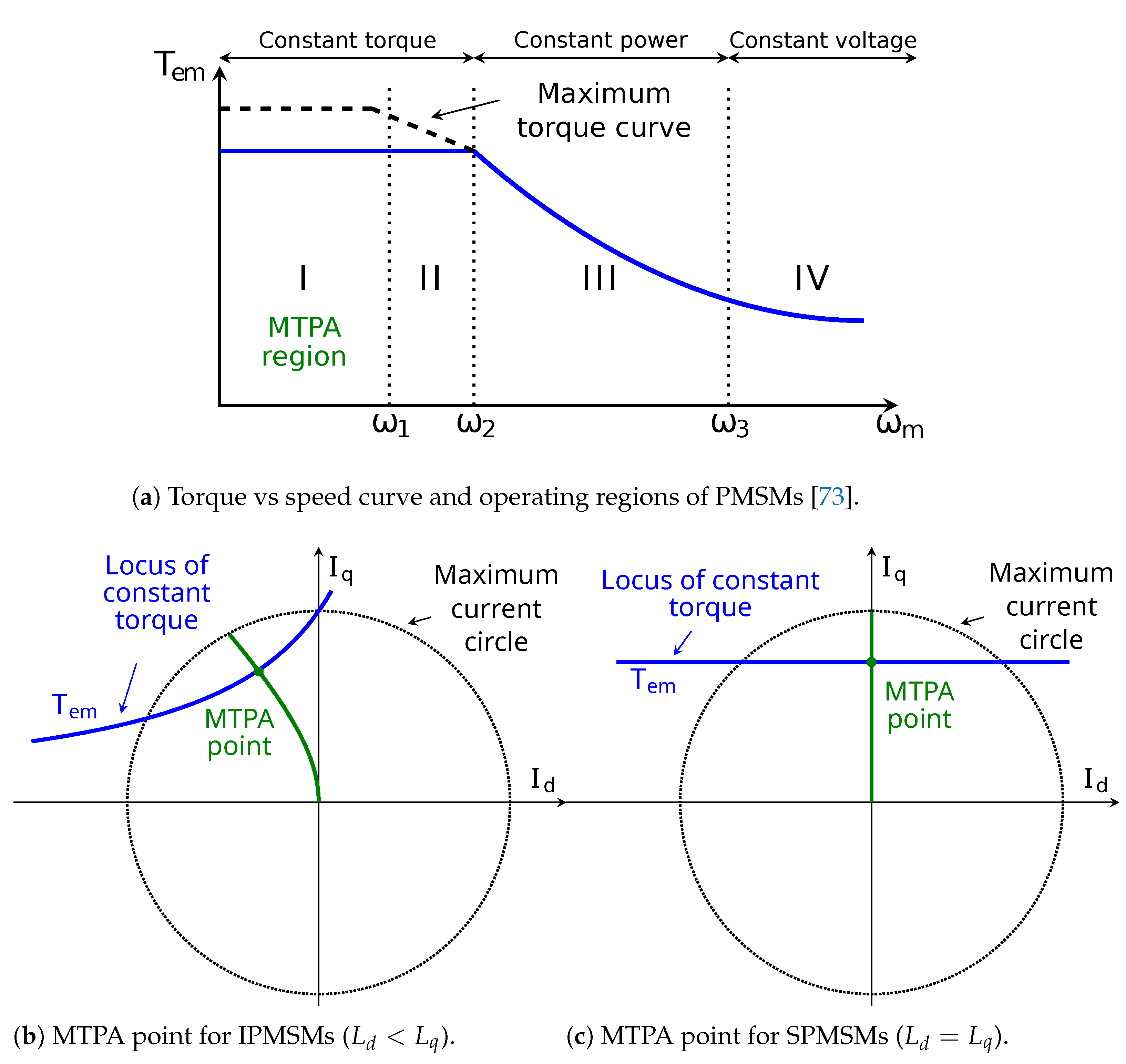
3.1. Operating Point in EVs:
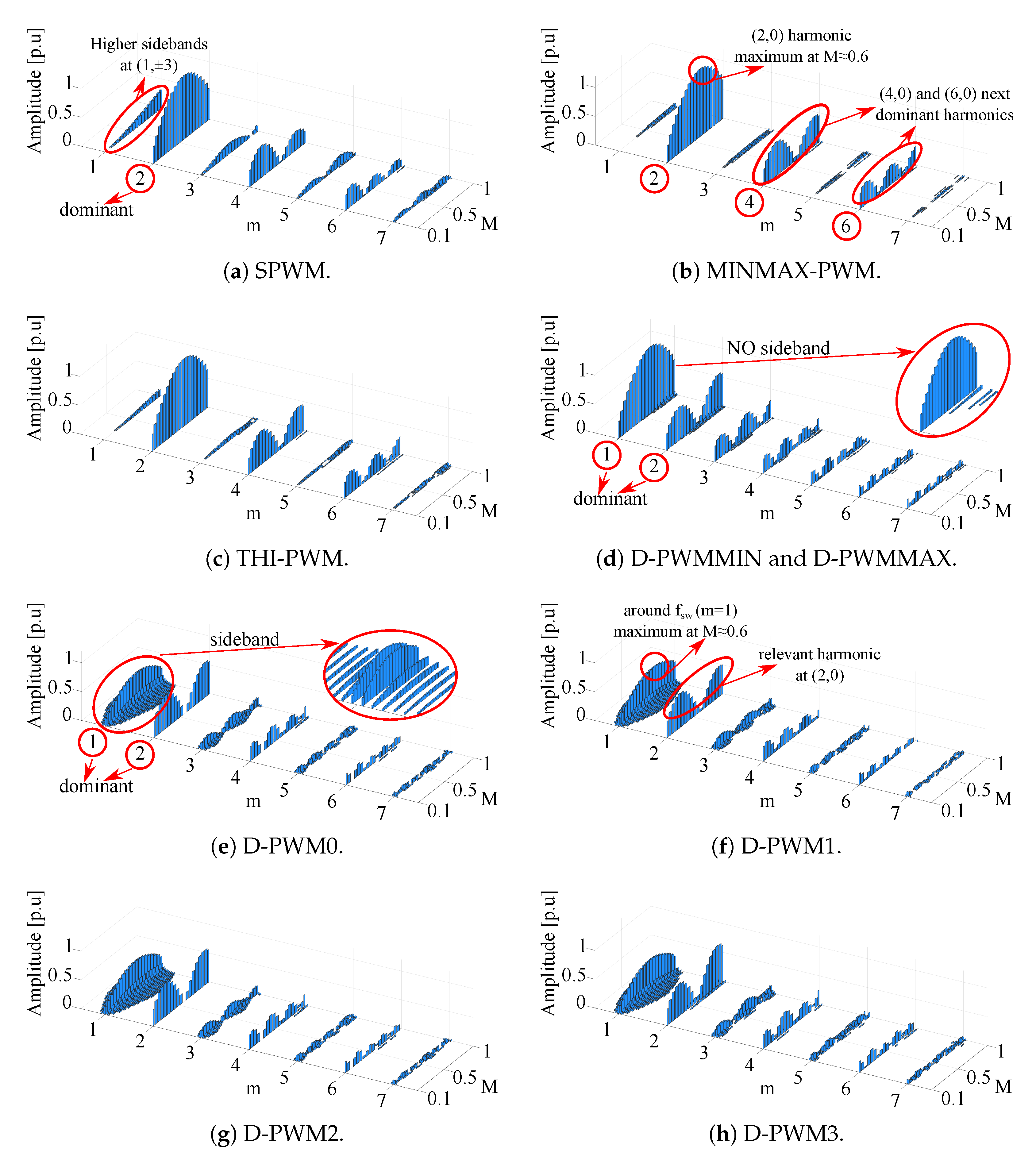
3.2. Input Current Harmonic Analysis for SPWM Technique
3.3. Input Current Harmonic Analysis for DZSI-PWM Techniques
- It highlights that for continuous modulations:
- The predominant () harmonic component is () which corresponds to . This harmonic component has a maximum at .
- The next dominant harmonics are situated at () and ().
- SPWM exhibits higher sideband harmonics at () than MINMAX-PWM and THI-PWM, which are quite similar in the full range of frequency and modulation index.
- Regarding discontinuous modulations:
- All analysed discontinuous PWM techniques have a significant harmonic component around (). This harmonic component has a maximum at .
- D-PWM0, D-PWM1, D-PWM2, and D-PWM3 exhibit wide sideband harmonics around , which leads to having harmonic components at lower frequencies, and the harmonics with highest amplitude are placed at () and ().
- D-PWMMAX and D-PWMMIN are equivalent, the sideband harmonics around are not so relevant, the predominant component lies at (), and the next important harmonic is placed at ().
- The relevant harmonic situated at () is negligible at .
4. Interleaving Schemes to Improve the Performance of ADTP Inverters
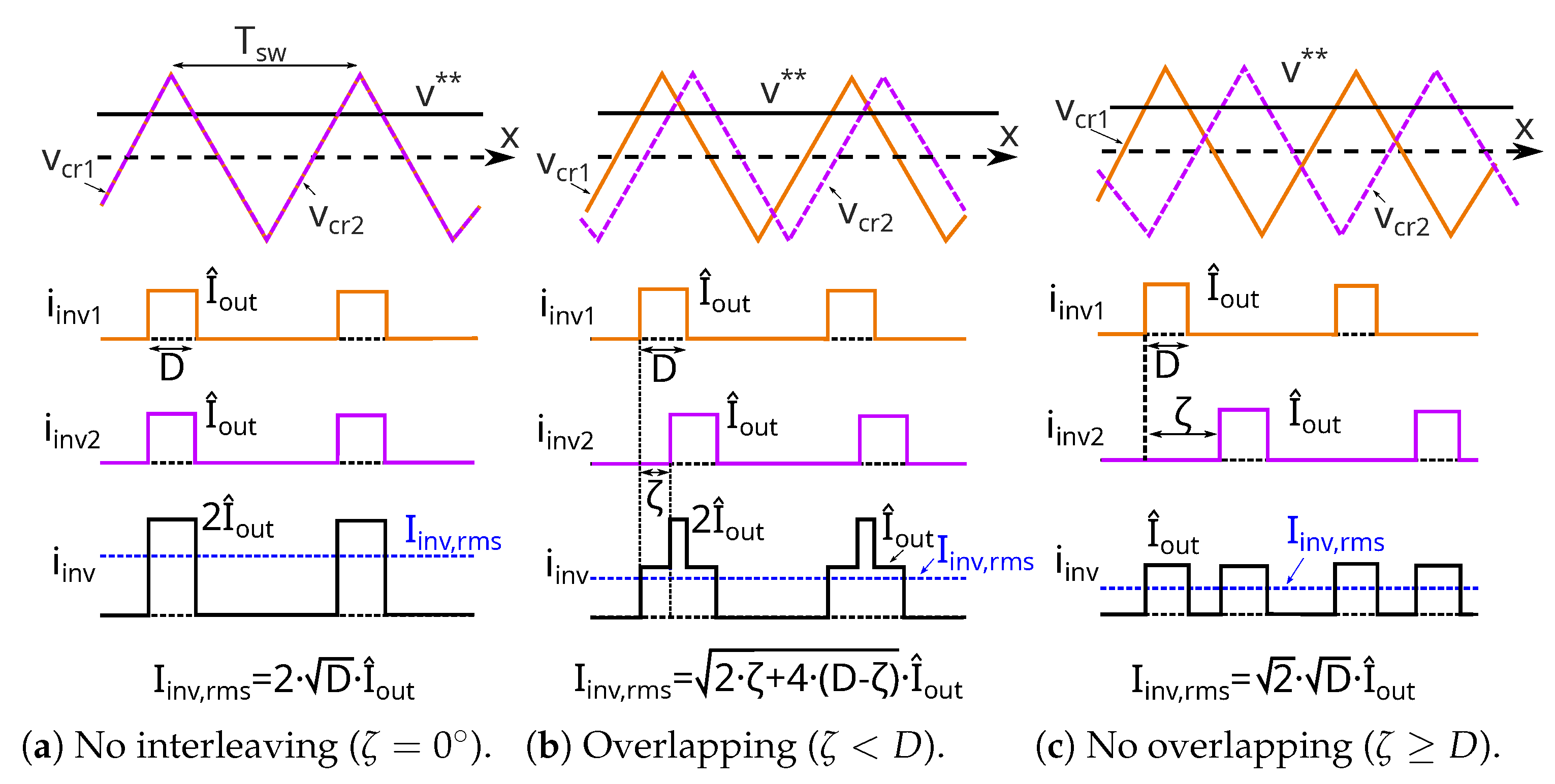
4.1. Constant Interleaving:
4.2. Dynamic Interleaving Scheme for Discontinuous PWM Techniques:
4.3. Optimal Interleaving Scheme for any DZSI-PWM:
5. Influence of Interleaving for DZSI-PWM Techniques on the Current Ripple and Voltage in the DC-Link Capacitor
5.1. RMS Value of the Current through DC-Link Capacitor at Static Operating Points
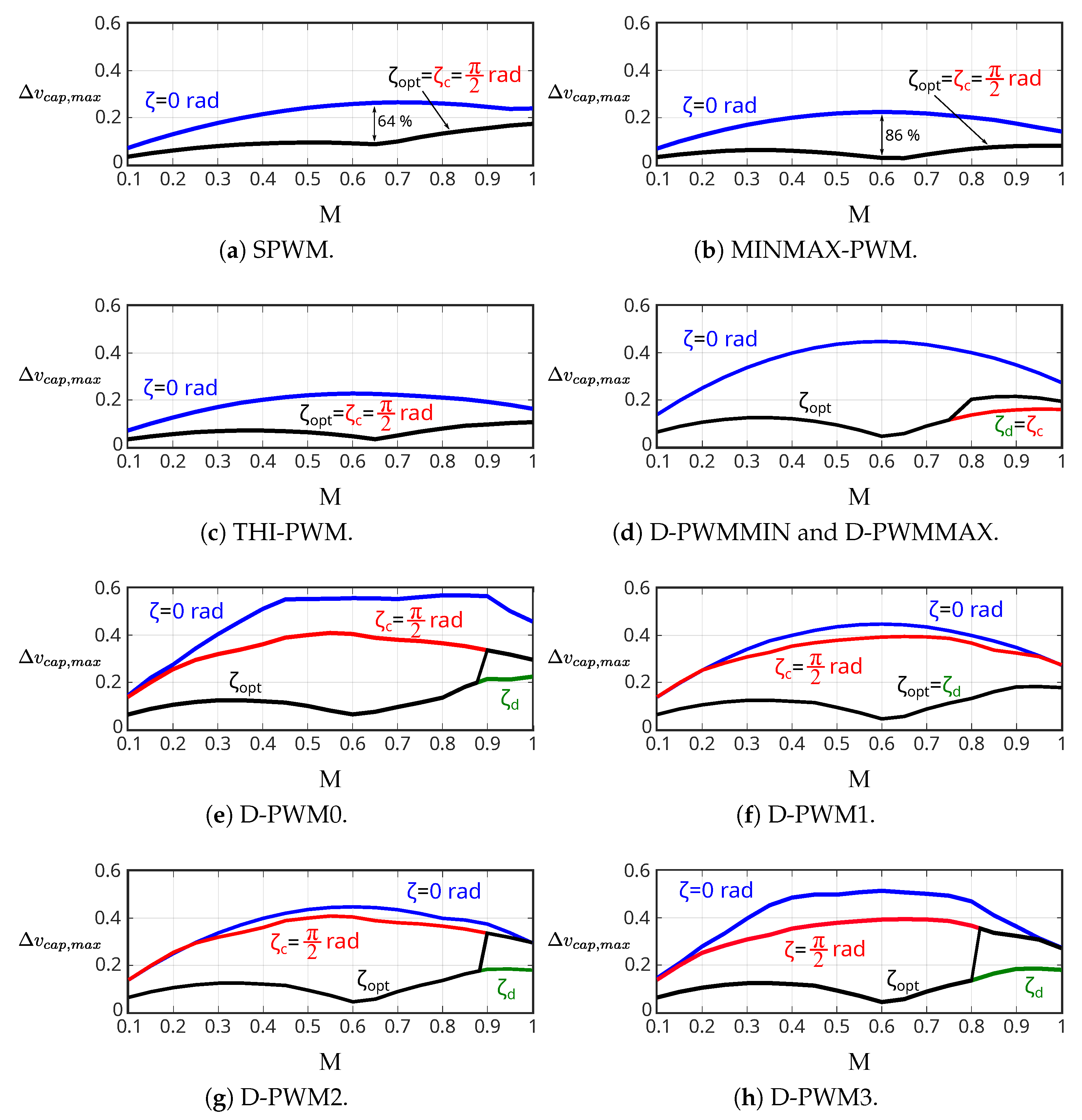
5.2. Voltage Ripple in the DC-Link Capacitor at Static Operating Points
5.3. RMS Value of the Current through DC-Link Capacitor during Standardized Driving Cycles
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
List of Abbreviations
| ADTP | Asymmetrical Dual Three-Phase |
| CB | Carrier-Based |
| C-PWM | Continuous PWM |
| DC | Direct Current |
| DOE | United States Department of Energy |
| D-PWM | Discontinuous PWM |
| DZSI | Double Zero Sequence Injection |
| ESR | Equivalent Series Resistance |
| EV | Electric Vehicle |
| HDF | Harmonic Distortion Factor |
| IPMSM | Interior Permanent Magnet Synchronous Motor |
| MINMAX-PWM | MIN-MAX PWM method |
| MTPA | Maximum Torque Per Ampere |
| MTPV | Maximum Torque Per Volt |
| NEDC | New European Driving Cycle |
| PM | Permanent Magnet |
| PMSM | Permanent Magnet Synchronous Motor |
| PWM | Pulse-Width Modulation |
| SPWM | Sinusoidal PWM |
| SPMSM | Surface-mounted Permanent Magnet Synchronous Motor |
| SV | Space Vector |
| THD | Total Harmonic Distortion |
| THI-PWM | Third Harmonic Injection PWM |
| UN ESCAP | United Nations’ Economic and Social Commission for Asia and the Pacific |
| USCAR | The United States Council for Automotive Research |
| VSI | Voltage-Source Inverters |
| WBG | Wide BandGap |
| WLTP | Worldwide Harmonized Light vehicles Test Procedure |
List of Symbols
| Real and imaginary coefficients of a Double Fourier series expansion. | |
| Complex-valued Double Fourier coefficient, . | |
| Complex-valued Double Fourier coefficients of (A). | |
| DC-Link capacitance (F). | |
| D | Duty cycle. |
| ESR | Equivalent Series Resistance of capacitor (). |
| Fundamental frequency of modulating signal (Hz). | |
| Harmonic frequency values, (Hz). | |
| Frequency of carrier signal (Hz). | |
| g | Generic two-variable time-domain function, . |
| Direct-, quadrature-axis currents of PMSM (A). | |
| Steady-state values of (A). | |
| Current flowing into loads of each VSI (A). | |
| Current flowing into legs of VSI1, VSI2 (A). | |
| Total current flowing into each VSI1, VSI2 (A). | |
| Current coming from upstream DC source, (A). | |
| ; | Current flowing into capacitor, ; its rms value (A). |
| ; | Total current flowing into both VSIs; its ripple component (A). |
| ; | Average of ; rms of (A). |
| Amplitude of output phase currents (A). | |
| Bessel function of the first kind and order k. | |
| Parameters to tune the MTPA control strategy. | |
| Direct-, quadrature-axis inductances of PMSM model (H). | |
| M | Modulation index, . |
| Number of pole pairs of PMSM. | |
| Baseband and carrier index variables, respectively. | |
| Stator resistance of PMSM model (). | |
| Fundamental period, (s). | |
| Electromagnetic torque produced by PMSM (Nm). | |
| Maximum torque specification of the PMSM (Nm). | |
| Switching period, (s). | |
| Injected zero-sequence component. | |
| Carrier signal (triangle-shaped). | |
| Modulating signal, . | |
| Modified modulating signal, . | |
| Direct-, quadrature-axis voltages of PMSM (V). | |
| Steady-state values of (V). | |
| Peak value of phase-to-neutral voltage (V). | |
| DC-link voltage (V). | |
| Intermediate time-domain variables, , . | |
| Integration limits for . | |
| Capacitor ripple voltage (V). | |
| Maximum over (V). | |
| Peak-to-peak value of the DC-Link voltage ripple in (V). | |
| Interleaving angle: generic, constant, dynamic, optimal. | |
| Angular position of modulating signal, . | |
| Partial phase lags given by ratios (or equalling ). | |
| Lag with respect to of current flowing into load ‘a’ of VSI1. | |
| Permanent-magnet flux in PMSM model (Wb). | |
| Fundamental angular frequency of modulating signal (). | |
| Electrical speed of PMSM (). | |
| Mechanical speed of PMSM (). | |
| Angular frequency of carrier signal (). |
References
- 2021 Electrification Annual Progress Report; Technical Report 20585; Vehicle Technologies Office—Department of Energy (DOE): Washington, DC, USA, 2022.
- Levi, E. Advances in Converter Control and Innovative Exploitation of Additional Degrees of Freedom for Multiphase Machines. IEEE Trans. Ind. Electron. 2016, 63, 433–448. [Google Scholar] [CrossRef]
- Munim, W.N.W.A.; Duran, M.J.; Che, H.S.; Bermúdez, M.; González-Prieto, I.; Rahim, N.A. A Unified Analysis of the Fault Tolerance Capability in Six-Phase Induction Motor Drives. IEEE Trans. Power Electron. 2017, 32, 7824–7836. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Z.; Xu, Z.; Cheng, M.; Wang, W.; Hu, Y. Comprehensive Diagnosis and Tolerance Strategies for Electrical Faults and Sensor Faults in Dual Three-Phase PMSM Drives. IEEE Trans. Power Electron. 2019, 34, 6669–6684. [Google Scholar] [CrossRef]
- Feng, G.; Lai, C.; Kelly, M.; Kar, N.C. Dual Three-Phase PMSM Torque Modeling and Maximum Torque per Peak Current Control Through Optimized Harmonic Current Injection. IEEE Trans. Ind. Electron. 2019, 66, 3356–3368. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, J.; Cheng, M.; Li, S. Fault-tolerant control of dual three-phase permanent-magnet synchronous machine drives under open-phase faults. IEEE Trans. Power Electron. 2017, 32, 2052–2063. [Google Scholar] [CrossRef]
- Eldeeb, H.M.; Abdel-Khalik, A.S.; Kullick, J.; Hackl, C. Pre- and postfault current control of dual three-phase reluctance synchronous drives. IEEE Trans. Ind. Electron. 2020, 67, 3361–3373. [Google Scholar] [CrossRef]
- Xiao, L.; Zhang, L.; Gao, F.; Quian, J. Robust fault-tolerant synergetic control for dual three-phase PMSM drives considering speed sensor fault. IEEE Access 2020, 8, 78912–78922. [Google Scholar] [CrossRef]
- Teymoori, V.; Kamper, M.; Wang, R.J.; Kennel, R. Sensorless control of dual three-phase permanent magnet synchronous machines—A review. Energies 2023, 16, 1326. [Google Scholar] [CrossRef]
- Frikha, M.A.; Croonen, J.; Deepak, K.; Benômar, Y.; El Baghdadi, M.; Hegazy, O. Multiphase motors and drive systems for electric vehicle powertrains: State of the art analysis and future trends. Energies 2023, 16, 768. [Google Scholar] [CrossRef]
- Robles, E.; Fernandez, M.; Andreu, J.; Ibarra, E.; Zaragoza, J.; Ugalde, U. Common-mode voltage mitigation in multiphase electric motor drive systems. Renew. Sustain. Energy Rev. 2022, 157, 1–21. [Google Scholar] [CrossRef]
- Zhu, Z.; Wang, S.; Shao, B.; Yan, L.; Xu, P.; Ren, Y. Advances in Dual-Three-Phase Permanent Magnet Synchronous Machines and Control Techniques. Energies 2021, 14, 7508. [Google Scholar] [CrossRef]
- Karttunen, J.; Kallio, S.; Peltoniemi, P.; Silventoinen, P.; Phyronen, O. Decoupled vector control scheme for dual three-phase permanent magnet synchronous machines. IEEE Trans. Ind. Electron. 2014, 61, 2185–2196. [Google Scholar] [CrossRef]
- Miyama, Y.; Ishizuka, M.; Kometani, H.; Akatsu, K. Vibration reduction by applying carrier phase-shift PWM on dual three-phase winding permanent magnet synchronous motor. IEEE Trans. Ind. Appl. 2018, 54, 5998–6004. [Google Scholar] [CrossRef]
- Hu, Y.; Huang, S.; Wu, X.; Li, X. Control of dual three-phase permanent magnet synchronous machine based on five-leg inverter. IEEE Trans. Power Electron. 2019, 34, 11071–11079. [Google Scholar] [CrossRef]
- Barcaro, M.; Bianchi, N.; Magnussen, F. Analysis and Tests of a Dual Three-Phase 12-Slot 10-Pole Permanent-Magnet Motor. IEEE Trans. Ind. Appl. 2010, 46, 2355–2362. [Google Scholar] [CrossRef]
- Shen, Z.; Jiang, D.; Liu, Z.; Ye, D.; Li, J. Common-mode voltage elimination for dual two-level inverter-fed asymmetrical six-phase PMSM. IEEE Trans. Power Electron. 2020, 35, 3828–3840. [Google Scholar] [CrossRef]
- Nelson, R.H.; Krause, P.C. Induction Machine Analysis for Arbitrary Displacement Between Multiple Winding Sets. IEEE Trans. Power Appar. Syst. 1974, PAS-93, 841–848. [Google Scholar] [CrossRef]
- Fernandez, M.; Sierra-Gonzalez, A.; Robles, E.; Kortabarria, I.; Ibarra, E.; Martin, J.L. New Modulation Technique to Mitigate Common Mode Voltage Effects in Star-Connected Five-Phase AC Drives. Energies 2020, 13, 607. [Google Scholar] [CrossRef]
- Zhao, Y.; Lipo, T. Space vector PWM control of dual three-phase induction machine using vector space decomposition. IEEE Trans. Ind. Appl. 1995, 31, 1100–1109. [Google Scholar] [CrossRef]
- Hadiouche, D.; Baghli, L.; Rezzoug, A. Space-vector PWM techniques for dual three-phase AC machine: Analysis, performance evaluation, and DSP implementation. IEEE Trans. Ind. Appl. 2006, 42, 1112–1122. [Google Scholar] [CrossRef]
- Marouani, K.; Baghli, L.; Hadiouche, D.; Kheloui, A.; Rezzoug, A. A New PWM Strategy Based on a 24-Sector Vector Space Decomposition for a Six-Phase VSI-Fed Dual Stator Induction Motor. IEEE Trans. Ind. Electron. 2008, 55, 1910–1920. [Google Scholar] [CrossRef]
- Prieto, J.; Riveros, J.A.; Bogado, B. Continuous and discontinuous SVPWM 2L+2M for asymmetrical dual three-phase drives. In Proceedings of the IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017; pp. 1–6. [Google Scholar]
- Suhel, S.M.; Maurya, R. Realization of 24-Sector SVPWM With New Switching Pattern for Six-Phase Induction Motor Drive. IEEE Trans. Power Electron. 2019, 34, 5079–5092. [Google Scholar] [CrossRef]
- Bojoi, R.; Tenconi, A.; Profumo, F.; Griva, G.; Martinello, D. Complete analysis and comparative study of digital modulation techniques for dual three-phase AC motor drives. In Proceedings of the IEEE Power Electronics Specialists Conference (PESC), Cairns, Australia, 23–27 June 2002; pp. 851–857. [Google Scholar]
- Rakesh, P.; Narayanan, G. Analysis of sine-triangle and zero-sequence injection modulation schemes for split-phase induction motor drive. IET Power Electron. 2016, 9, 1–12. [Google Scholar] [CrossRef]
- Prieto, J.; Levi, E.; Barrero, F.; Toral, S. Output current ripple analysis for asymmetrical six-phase drives using double zero-sequence injection PWM. In Proceedings of the IEEE Industrial Electronics Society (IECON), Melbourne, Australia, 7–10 November 2011; pp. 3692–3697. [Google Scholar]
- Liu, Z.; Zheng, Z.; Peng, Z.; Li, Y.; Hao, L. A Sawtooth Carrier-Based PWM for Asymmetrical Six-Phase Inverters With Improved Common-Mode Voltage Performance. IEEE Trans. Power Electron. 2018, 33, 9444–9458. [Google Scholar] [CrossRef]
- Rakesh, P.R.; Narayanan, G. Investigation on Zero-Sequence Signal Injection for Improved Harmonic Performance in Split-Phase Induction Motor Drives. IEEE Trans. Ind. Electron. 2017, 64, 2732–2741. [Google Scholar] [CrossRef]
- Quan, Z.; Li, Y.W. Impact of PWM Schemes on the Common-Mode Voltage of Interleaved Three-Phase Two-Level Voltage Source Converters. IEEE Trans. Ind. Electron. 2019, 66, 852–864. [Google Scholar] [CrossRef]
- Hava, A.M.; Kerkman, R.J.; Lipo, T.A. Simple analytical and graphical methods for carrier-based PWM-VSI drives. IEEE Trans. Power Electron. 1999, 14, 49–61. [Google Scholar] [CrossRef]
- Taha, W.; Azer, P.; Callegaro, A.D.; Emadi, A. Multiphase Traction Inverters: State-of-the-Art Review and Future Trends. IEEE Access 2022, 10, 4580–4599. [Google Scholar] [CrossRef]
- Salem, A.; Narimani, M. A Review on Multiphase Drives for Automotive Traction Applications. IEEE Trans. Transp. Electrif. 2019, 5, 1329–1348. [Google Scholar] [CrossRef]
- Wen, H.; Xiao, W.; Wen, X.; Armstrong, P. Analysis and evaluation of DC-Link capacitors for high power density electric vehicle drive systems. IEEE Trans. Veh. Technol. 2012, 61, 2950–2964. [Google Scholar]
- Rodionov, A.; Acquaviva, A.; Liu, Y. Sizing and energy efficiency analysis of a multi-phase FSCW PMSM drive for traction application. In Proceedings of the Annual Conference of the IEEE Industrial Electronics Society (IECON), Singapore, 18–21 October 2020; pp. 2069–2074. [Google Scholar]
- Tcai, A.; Alsofyani, I.M.; Seo, I.Y.; Lee, K.B. DC-Link ripple reduction in a DPWM-based two-level VSI. Energies 2018, 11, 3008. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Liserre, M.; Blaabjerg, F. Toward reliable power electronics: Challenges, design tools, and opportunities. IEEE Ind. Electron. Mag. 2013, 7, 17–26. [Google Scholar] [CrossRef]
- Yang, S.; Bryant, A.; Mawby, P.; Xiang, D.; Ran, L.; Tavner, P. An industry-based survey of reliability in power electronic converters. IEEE Trans. Ind. Appl. 2011, 47, 1441–1451. [Google Scholar] [CrossRef]
- Wang, H.; Davari, P.; Wang, H.; Kumar, D.; Zare, F.; Blaabjerg, F. Lifetime estimation of DC-Link capacitors in adjustable speed drives under grid voltage unbalances. IEEE Trans. Power Electron. 2019, 34, 4064–4078. [Google Scholar] [CrossRef]
- Wang, H.; Blaabjerg, F. Reliability of capacitors for DC-Link applications in power eectronic converters—An overview. IEEE Trans. Ind. Appl. 2014, 50, 3569–3578. [Google Scholar] [CrossRef]
- Huang, S.; Wang, H.; Kumar, D.; Zhu, G.; Wang, H. Reliability evaluation of DC-Link capacitors in multi drive systems. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 3157–3162. [Google Scholar]
- Wang, H.; Huang, S.; Kumar, D.; Wang, Q.; Deng, X.; Zhu, G.; Wang, H. Lifetime prediction of DC-Link capacitors in multiple drives system based on simplified analytical modeling. IEEE Trans. Power Electron. 2021, 36, 844–860. [Google Scholar] [CrossRef]
- Thomas, R.; Husson, H.; Garbuio, L.; Gerbaud, L. Comparative study of the Tesla Model S and Audi e-Tron Induction Motors. In Proceedings of the Conference on Electrical Machines, Drives and Power Systems (ELMA), Sofia, Bulgaria, 1–4 July 2021; pp. 1–6. [Google Scholar]
- Robles, E.; Matallana, A.; Aretxabaleta, I.; Andreu, J.; Fernández, M.; Martín, J.L. The role of power device technology in the electric vehicle powertrain. Int. J. Energy Res. 2022, 46, 22222–22265. [Google Scholar] [CrossRef]
- Poorfakhraei, A.; Narimani, M.; Emadi, A. A Review of Multilevel Inverter Topologies in Electric Vehicles: Current Status and Future Trends. IEEE Open J. Power Electron. 2021, 2, 155–170. [Google Scholar] [CrossRef]
- Hybrid Vehicles and Electric Vehicles Capacitors; Technical Report; KYOCERA-AVX: Fountain Inn, CO, USA, 2017.
- Vujacic, M.; Dordevic, O.; Grandi, G. Evaluation of DC-Link Voltage Switching Ripple in Multiphase PWM Voltage Source Inverters. IEEE Trans. Power Electron. 2020, 35, 3478–3490. [Google Scholar] [CrossRef]
- Vujacic, M.; Hammami, M.; Dordevic, O.; Grandi, G. Evaluation of DC-Link voltage ripple in five-phase PWM voltage source inverters. J. Eng. 2019, 2019, 3709–3714. [Google Scholar] [CrossRef]
- Rodionov, A.; Huang, X.; Liu, Y. Analysis of DC Link Current and Voltage Stress for Motor Drive Application in Dual Three-Phase Configuration. In Proceedings of the Annual Conference of the IEEE Industrial Electronics Society (IECON), Singapore, 18–21 October 2020; pp. 1267–1272. [Google Scholar]
- Baburajan, S.; Wang, H.; Kumar, D.; Wang, Q.; Blaabjerg, F. DC-Link current harmonic mitigation via phase-shifting of carrier waves in paralleled inverter systems. Energies 2021, 14, 4229. [Google Scholar] [CrossRef]
- Baburajan, S.; Wang, H.; Mandrile, F.; Yao, B.; Wang, Q.; Kumar, D.; Blaabjerg, F. Design of common DC-Link capacitor in multiple-drive system Based on reduced DC-Link current harmonics modulation. IEEE Trans. Power Electron. 2022, 37, 9703–9717. [Google Scholar] [CrossRef]
- Harasis, S.K.; Haque, M.E.; Chowdhury, A.; Sozer, Y. SiC Based Interleaved VSI Fed Transverse Flux Machine Drive for High Efficiency, Low EMI Noise and High Power Density Applications. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 4943–4948. [Google Scholar]
- Schiedermeier, M.; Schlamp, F.; Rettner, C.; März, M. Analytical calculation of the RMS value and the spectrum of the DC-Link current of a dual-inverter. IEEE Trans. Power Electron. 2022, 37, 782–794. [Google Scholar] [CrossRef]
- Lyu, X.; Li, Y.; Cao, D. DC-Link RMS Current Reduction by Increasing Paralleled Three-Phase Inverter Module Number for Segmented Traction Drive. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 171–181. [Google Scholar] [CrossRef]
- Zhang, D.; Wang, F.; Burgos, R.; Lai, R.; Boroyevich, D. DC-Link Ripple Current Reduction for Paralleled Three-Phase Voltage-Source Converters With Interleaving. IEEE Trans. Power Electron. 2011, 26, 1741–1753. [Google Scholar] [CrossRef]
- Zhang, D.; Wang, F.; Burgos, R.; Lai, R.; Boroyevich, D. Impact of Interleaving on AC Passive Components of Paralleled Three-Phase Voltage-Source Converters. IEEE Trans. Ind. Appl. 2010, 46, 1042–1054. [Google Scholar] [CrossRef]
- Jeong, M.G.; Shin, H.U.; Baek, J.W.; Lee, K.B. An interleaving scheme for DC-Link current ripple reduction in parallel-connected generator systems. J. Power Electron. 2017, 17, 1004–1013. [Google Scholar]
- Ye, H.; Emadi, A. An interleaving scheme to reduce DC-link current harmonics of dual traction inverters in hybrid electric vehicles. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition (APEC), Fort Worth, TX, USA, 16–20 March 2014; pp. 3205–3211. [Google Scholar]
- Platek, T. Analysis of ripple current in the capacitors of active power filters. Energies 2019, 12, 4493. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Mascarella, D.; Joos, G. Interleaved SVPWM and DPWM for dual three-phase inverter-PMSM: An automotive application. In Proceedings of the IEEE Transportation Electrification Conference and Expo (ITEC), Beijing, China, 31 August–3 September 2014; pp. 1–6. [Google Scholar]
- Hopkins, A.; Hopfensperger, B.; Mellor, P. DC-Link Capacitor Reduction in Low Voltage and High Power Integrated Modular Motor Drives. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MA, USA, 29 September–3 October 2019; pp. 3208–3214. [Google Scholar]
- Schirmer, P.A.; Glose, D. Optimal Interleaved Modulation for DC-Link Loss Optimization in Six-Phase Drives. In Proceedings of the IEEE International Conference on Power Electronics and Drive Systems (PEDS), Toulouse, France, 9–12 July 2019; pp. 1–6. [Google Scholar]
- Chowdhury, A.; Haque, M.E.; Das, S.; Rahman, M.A.; Sozer, Y. Dynamic Interleaving Method to Reduce DC-Link Ripple for Asymmetric Dual Three-Phase Permanent Magnet Synchronous Machine Drives. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 19–23 March 2022; pp. 125–129. [Google Scholar]
- Holmes, D.G.; Lipo, T.A. Pulse Width Modulation for Power Converters: Principles and Practice; Wiley-IEEE Press: Piscataway, NJ, USA, 2003. [Google Scholar]
- Bierhoff, M.H.; Fuchs, F.W. DC-Link Harmonics of Three-Phase Voltage-Source Converters Influenced by the Pulsewidth-Modulation Strategy - An Analysis. IEEE Trans. Ind. Electron. 2008, 55, 2085–2092. [Google Scholar] [CrossRef]
- Orfanoudakis, G.I.; Sharkh, S.M.; Yuratich, M.A. Analysis of DC-Link capacitor losses in three-level neutral point clamped and cascaded H-Bridge voltage source inverters. In Proceedings of the IEEE International Symposium on Industrial Electronics (ISIE), Bari, Italy, 4–7 July 2010; pp. 664–669. [Google Scholar]
- Kolar, J.; Round, S. Analytical calculation of the RMS current stress on the DC-Link capacitor of voltage-PWM converter systems. Electr. Power Appl. 2006, 153, 535–543. [Google Scholar] [CrossRef]
- Dahono, P.A.; Deni; Rizqiawan, A. Analysis and minimization of input current and voltage ripples of five-phase PWM inverters. In Proceedings of the International Power and Energy Conference (PECON), Johor Bahru, Malaysia, 1–3 December 2008; pp. 625–629. [Google Scholar]
- Dahono, P.A.; Deni; Akbarifutra, C.P.; Rizqiawan, A. Input ripple analysis of five-phase pulse width modulated inverters. IET Power Electron. 2010, 3, 716–723. [Google Scholar] [CrossRef]
- Nie, Z.; Schofield, N. Multi-phase VSI DC-Link capacitor considerations. IET Electr. Power Appl. 2019, 13, 1804–1811. [Google Scholar] [CrossRef]
- Liu, X.; Chen, H.; Zhao, J.; Belahcen, A. Research on the Performances and Parameters of Interior PMSM Used for Electric Vehicles. IEEE Trans. Ind. Electron. 2016, 63, 3533–3545. [Google Scholar] [CrossRef]
- Iyer, K.L.V.; Lai, C.; Mukundan, S.; Dhulipati, H.; Mukherjee, K.; Kar, N.C. Investigation of Interior Permanent Magnet Motor With Dampers for Electric Vehicle Propulsion and Mitigation of Saliency Effect During Integrated Charging Operation. IEEE Trans. Veh. Technol. 2019, 68, 1254–1265. [Google Scholar] [CrossRef]
- Wang, S.; Kang, J.; Degano, M.; Galassini, A.; Gerada, C. An accurate wide-speed range control method of IPMSM considering resistive voltage drop and magnetic saturation. IEEE Trans. Ind. Electron. 2020, 67, 2630–2641. [Google Scholar] [CrossRef]
- Trancho, E.; Ibarra, E.; Arias, A.; Kortabarria, I.; Jurgens, J.; Marengo, L.; Fricassè, A.; Gragger, J.V. PM-assisted synchronous reluctance machine flux weakening control for EV and HEV applications. IEEE Trans. Ind. Electron. 2018, 65, 2986–2995. [Google Scholar] [CrossRef]
- Dianov, A.; Tinazzi, F.; Calligaro, S.; Bolognani, S. Review and classification of MTPA control algorithms for synchronous motors. IEEE Trans. Power Electron. 2022, 37, 3990–4007. [Google Scholar] [CrossRef]
- Jung, S.Y.; Hong, J.; Nam, K. Current Minimizing Torque Control of the IPMSM Using Ferrari’s Method. IEEE Trans. Power Electron. 2013, 28, 5603–5617. [Google Scholar] [CrossRef]
- McGrath, B.P.; Holmes, D.G. A General Analytical Method for Calculating Inverter DC-Link Current Harmonics. IEEE Trans. Ind. Appl. 2009, 45, 1851–1859. [Google Scholar] [CrossRef]
- Baricz, Á. Generalized Bessel Functions of the First Kind; Springer: Berlin/Heidelberg, Germany, 2010; pp. 1–22. [Google Scholar]
- Hu, Y.; Li, Y.; Ma, X.; Li, X.; Huang, S. Flux-Weakening Control of Dual Three-Phase PMSM Based on Vector Space Decomposition Control. IEEE Trans. Power Electron. 2021, 36, 8428–8438. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Number of pole pairs () | 19 | Stator resistance () | 61.43 [m] |
| d-axis inductance () | 1.00 [mH] | q-axis inductance () | 1.35 [mH] |
| PM flux linkage () | 0.038 [Wb] | DC bus nominal voltage () | 400 [V] |
| Maximum torque () | 54 [N·m] | Base mech. speed () | 3000 [rpm] |
| rad | (2,0) | (6,0) | (10,0) |
| (1,3) | (5,3) | (9,3) | |
| (3,−3) | (7,−3) | (11,−3) | |
| rad | (1,0) | (3,0) | (5,0) |
| (2,6) | (4,6) | (6,6) | |
| (2,−6) | (4,−6) | (6,−6) |
| Noninterleaved (A) | Interleaved (A) | Reduction (%) | |
|---|---|---|---|
| SPWM | 1.06 | 0.82 | 22.94 |
| MINMAX-PWM | 1.13 | 0.82 | 27.48 |
| THI-PWM | 1.13 | 0.82 | 27.25 |
| D-PWMMIN | 0.82 | 0.64 | 21.23 |
| D-PWMMAX | 0.83 | 0.64 | 22.67 |
| D-PWM0 | 0.78 | 0.65 | 16.01 |
| D-PWM1 | 0.71 | 0.59 | 16.27 |
| D-PWM2 | 0.72 | 0.61 | 16.01 |
| D-PWM3 | 0.79 | 0.67 | 15.37 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
DeMarcos, A.; Robles, E.; Ugalde, U.; Martinez de Alegria, I.; Andreu, J. Interleaving Modulation Schemes in Asymmetrical Dual Three-Phase Machines for the DC-Link Stress Reduction. Machines 2023, 11, 267. https://doi.org/10.3390/machines11020267
DeMarcos A, Robles E, Ugalde U, Martinez de Alegria I, Andreu J. Interleaving Modulation Schemes in Asymmetrical Dual Three-Phase Machines for the DC-Link Stress Reduction. Machines. 2023; 11(2):267. https://doi.org/10.3390/machines11020267
Chicago/Turabian StyleDeMarcos, Ander, Endika Robles, Unai Ugalde, Inigo Martinez de Alegria, and Jon Andreu. 2023. "Interleaving Modulation Schemes in Asymmetrical Dual Three-Phase Machines for the DC-Link Stress Reduction" Machines 11, no. 2: 267. https://doi.org/10.3390/machines11020267