
Dynamic Modeling and Model-Based Control with Neural Network-Based Compensation of a Five Degrees-of-Freedom Parallel Mechanism

Abstract
:1. Introduction
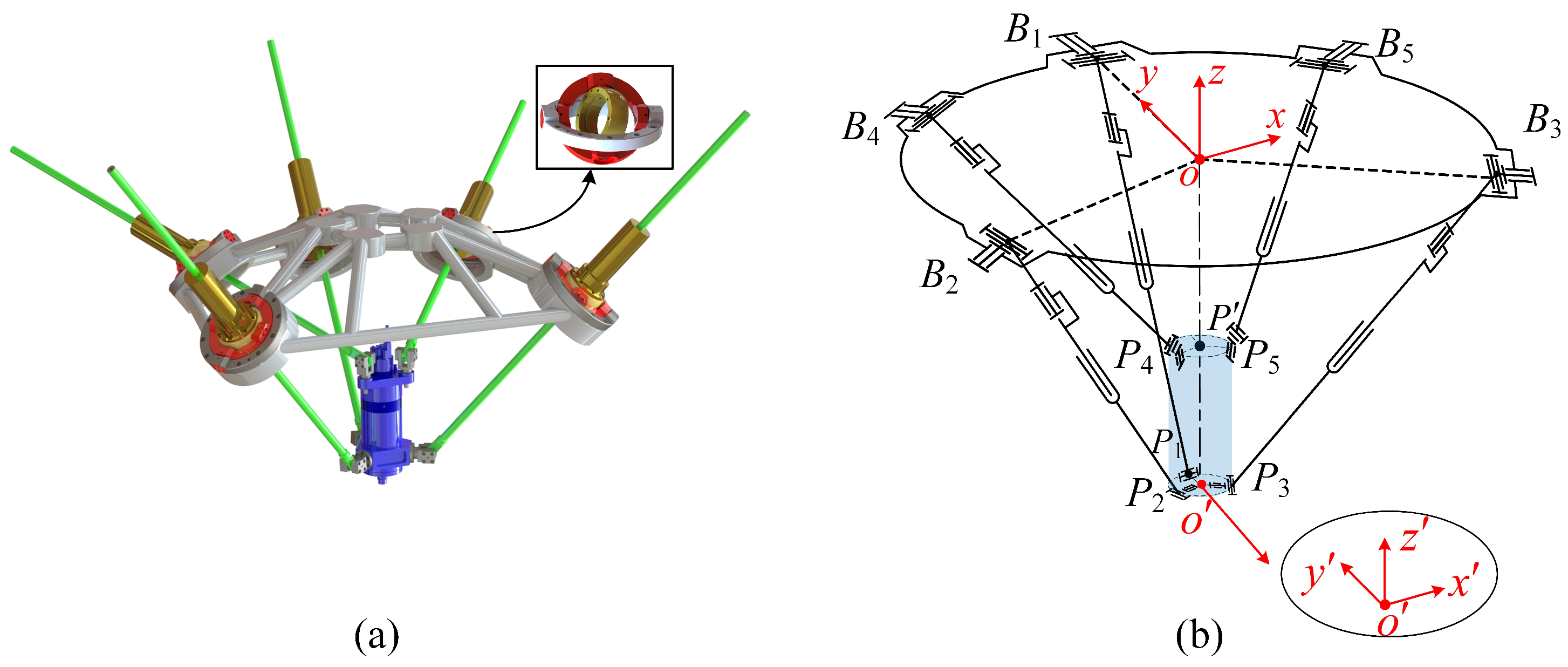
2. Structure Description and Kinematics Analysis
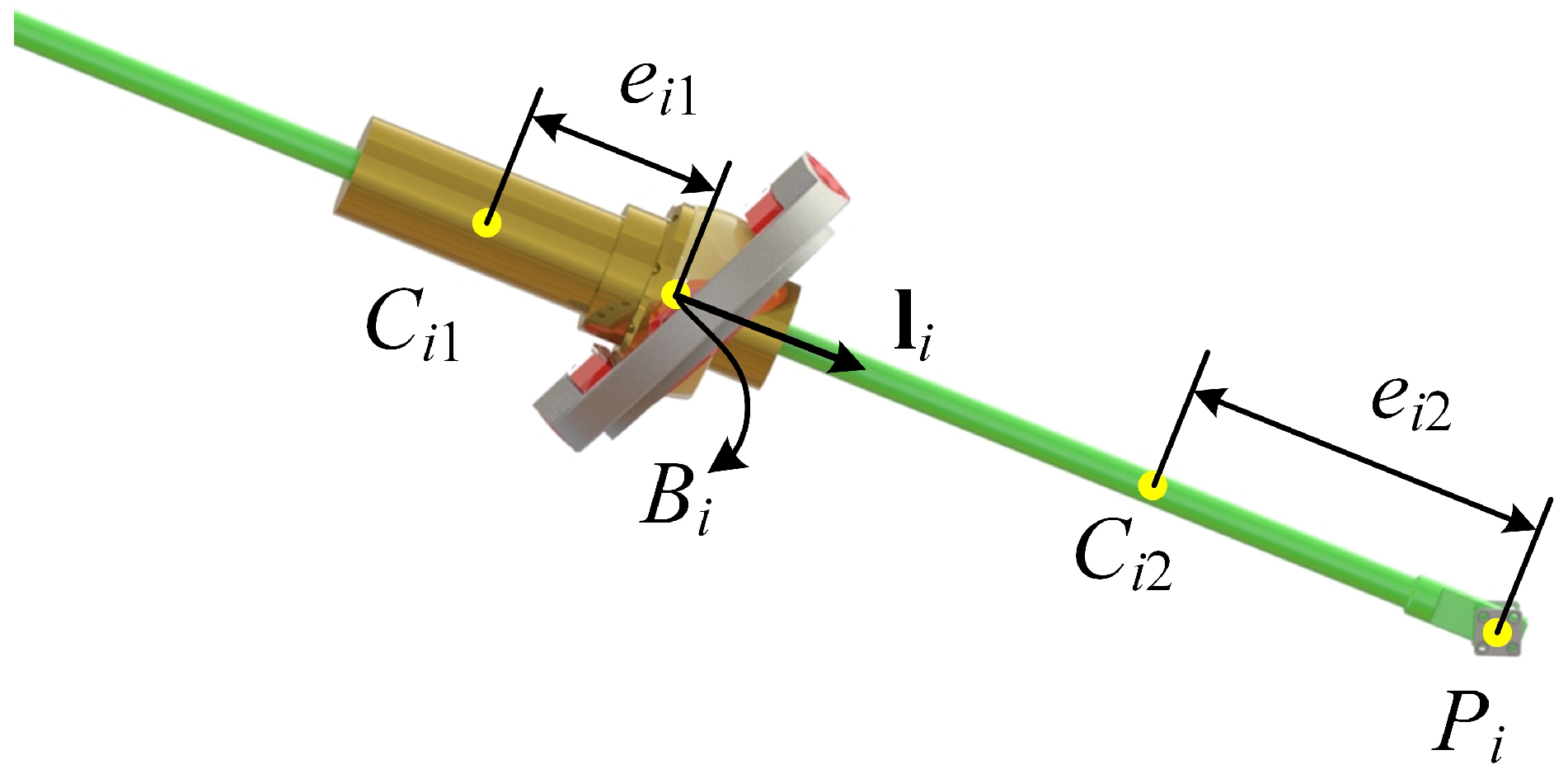
2.1. Structure Description
2.2. Inverse Position Analysis
2.3. Velocity Analysis and Jacobian Matrix

3. Dynamic Modeling
3.1. Kinetic Energy
3.2. Potential Energy
3.3. Lagrange Equation
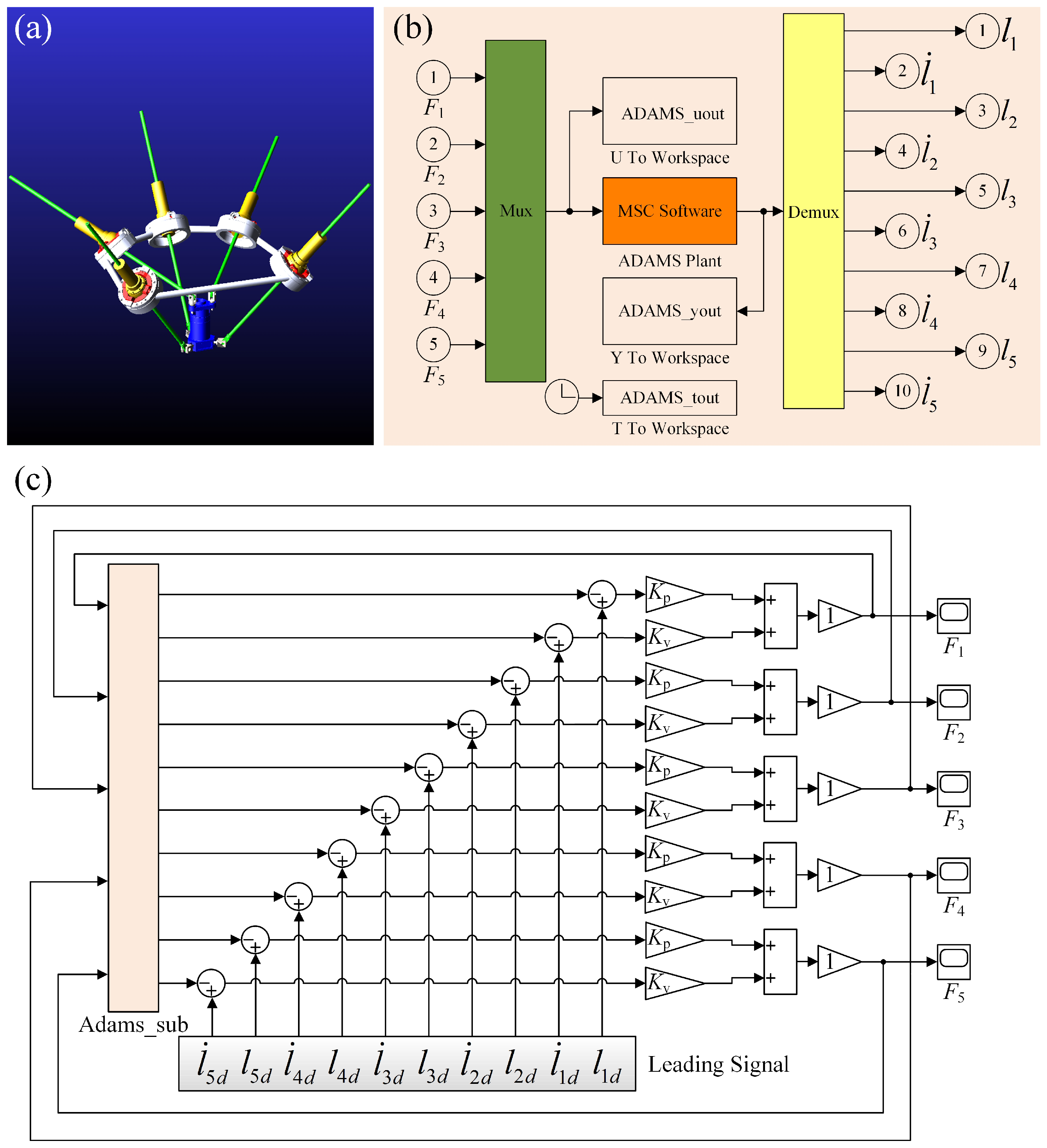
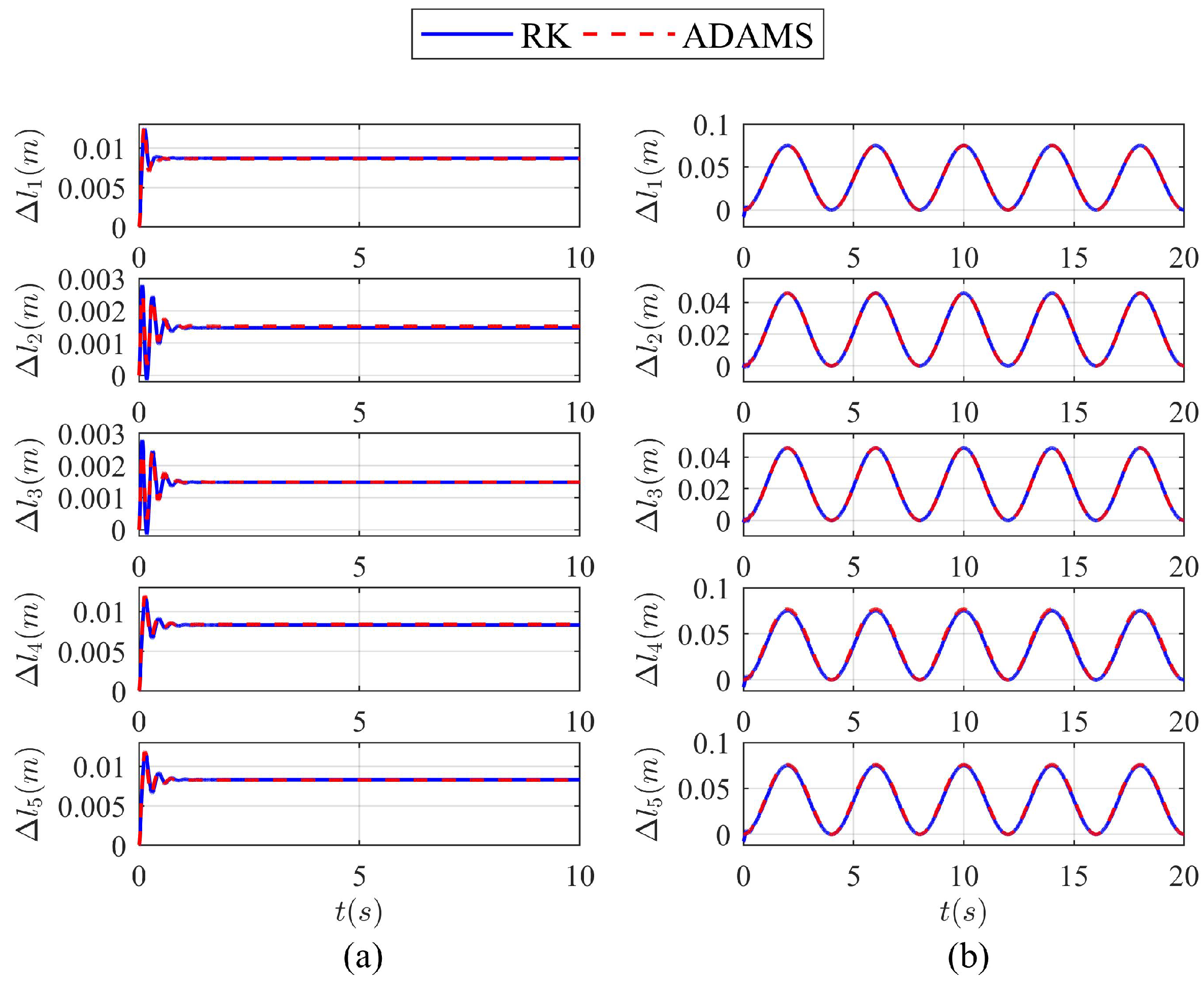
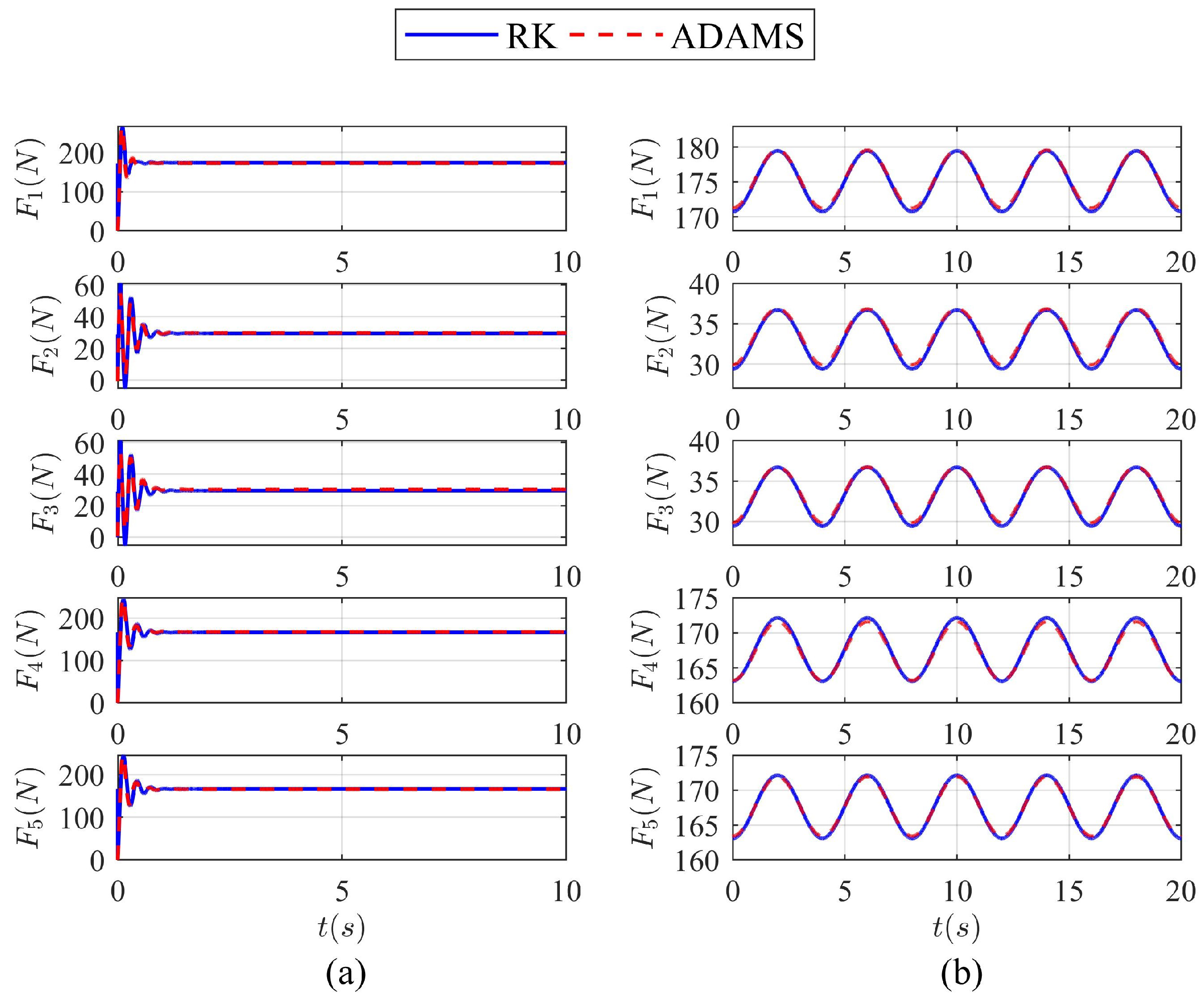
4. Dynamic Model Validation
5. Control Design Based on Dynamic Model
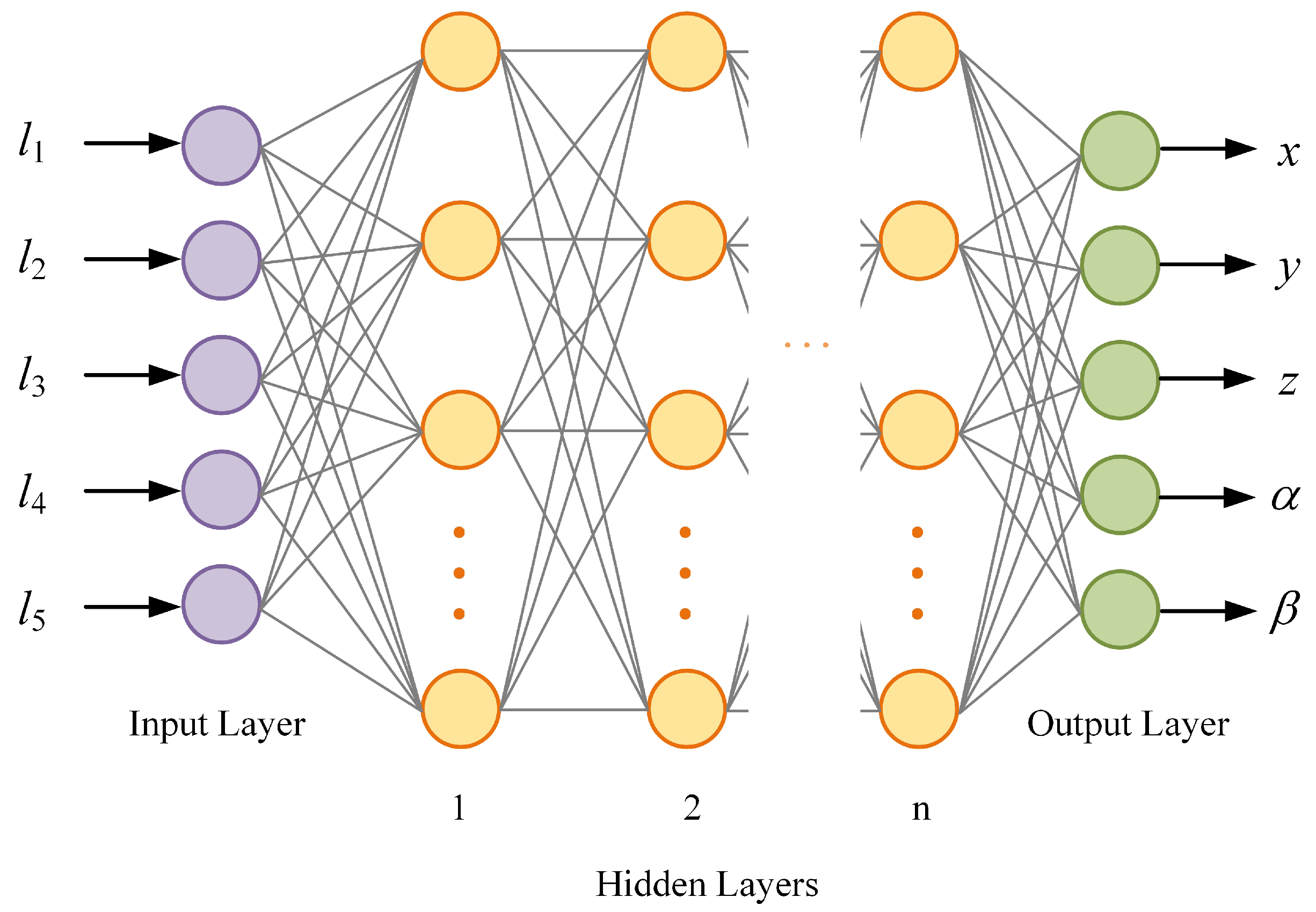
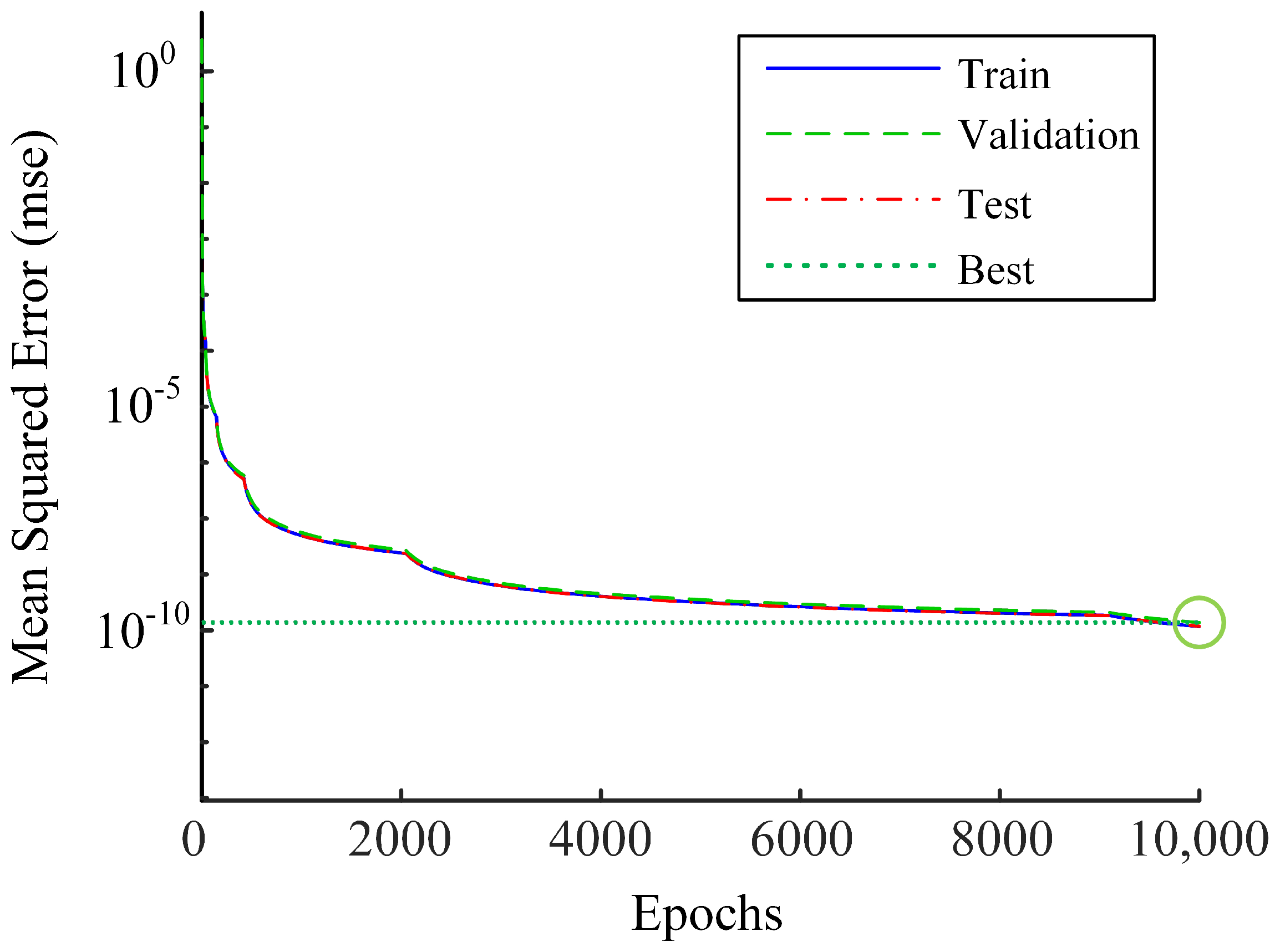
5.1. End-Effector State Predictor of Spatial PM Based on DNN Method
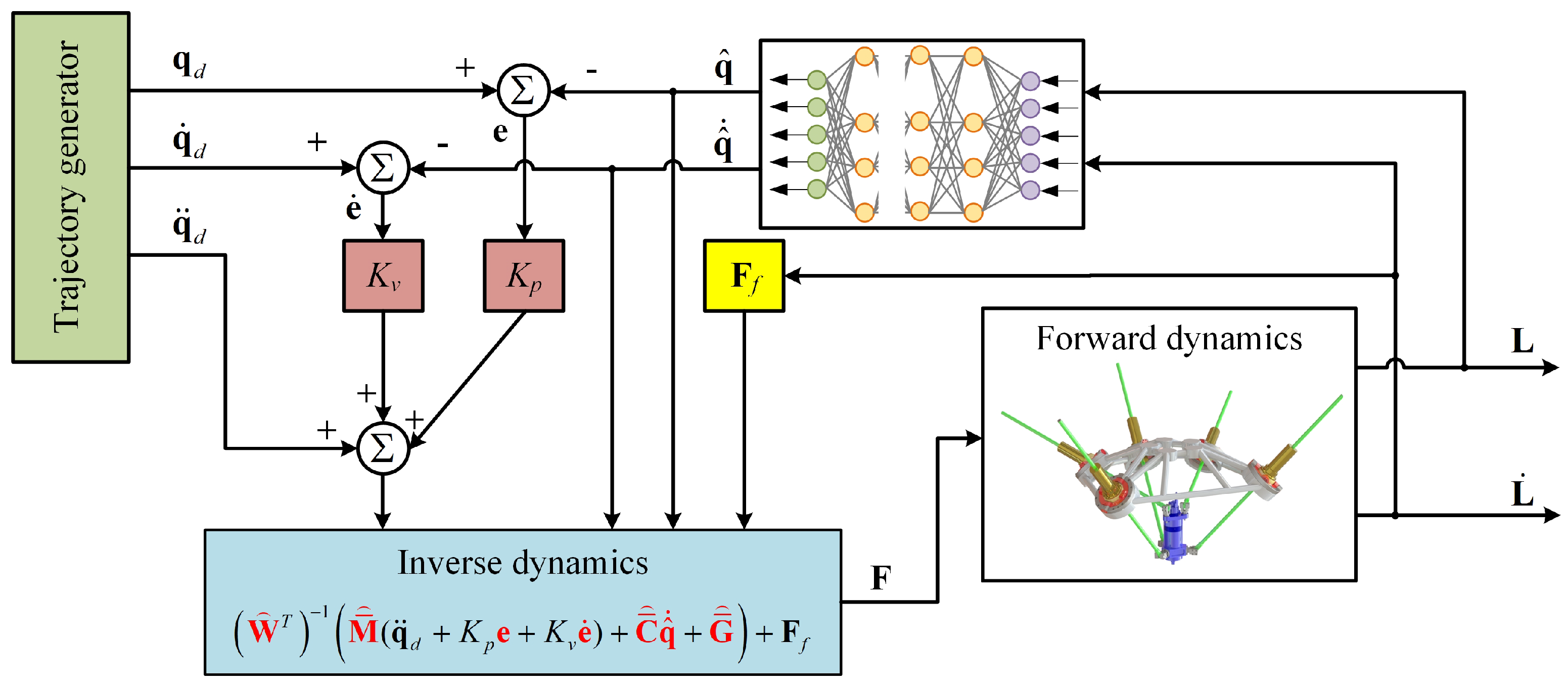
5.2. Design of the Controller with DNN Based Feedback Compensation
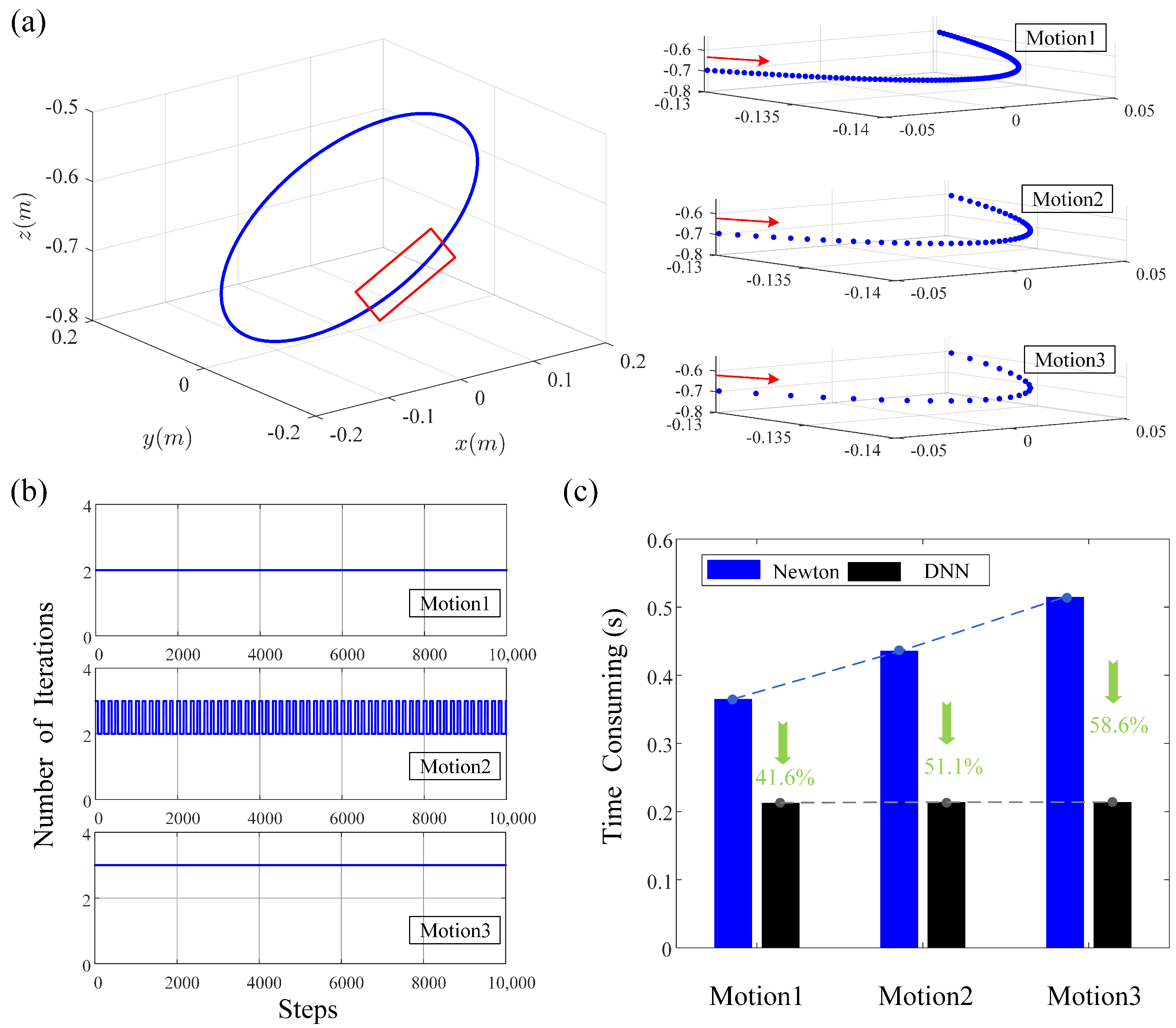
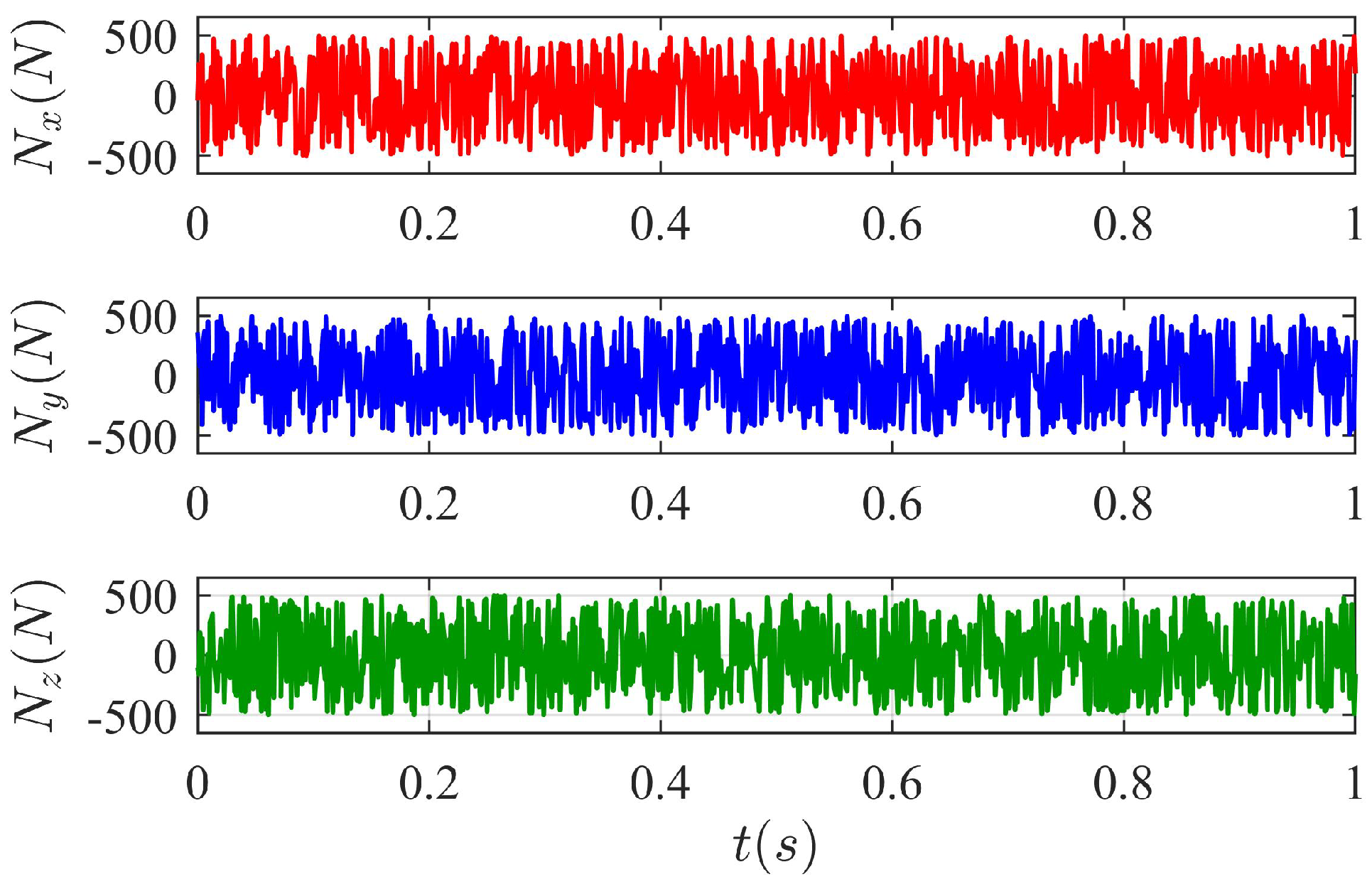
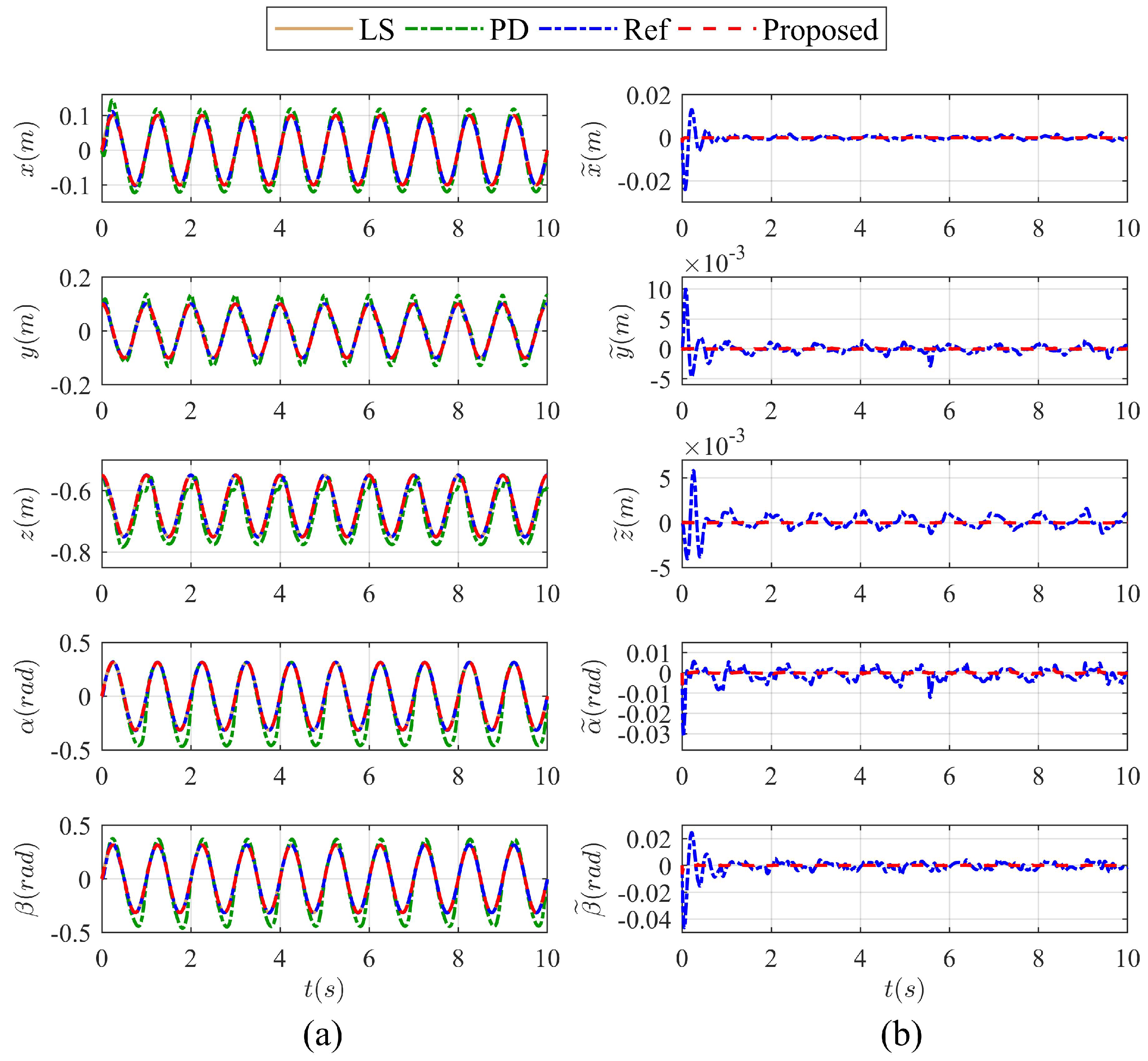
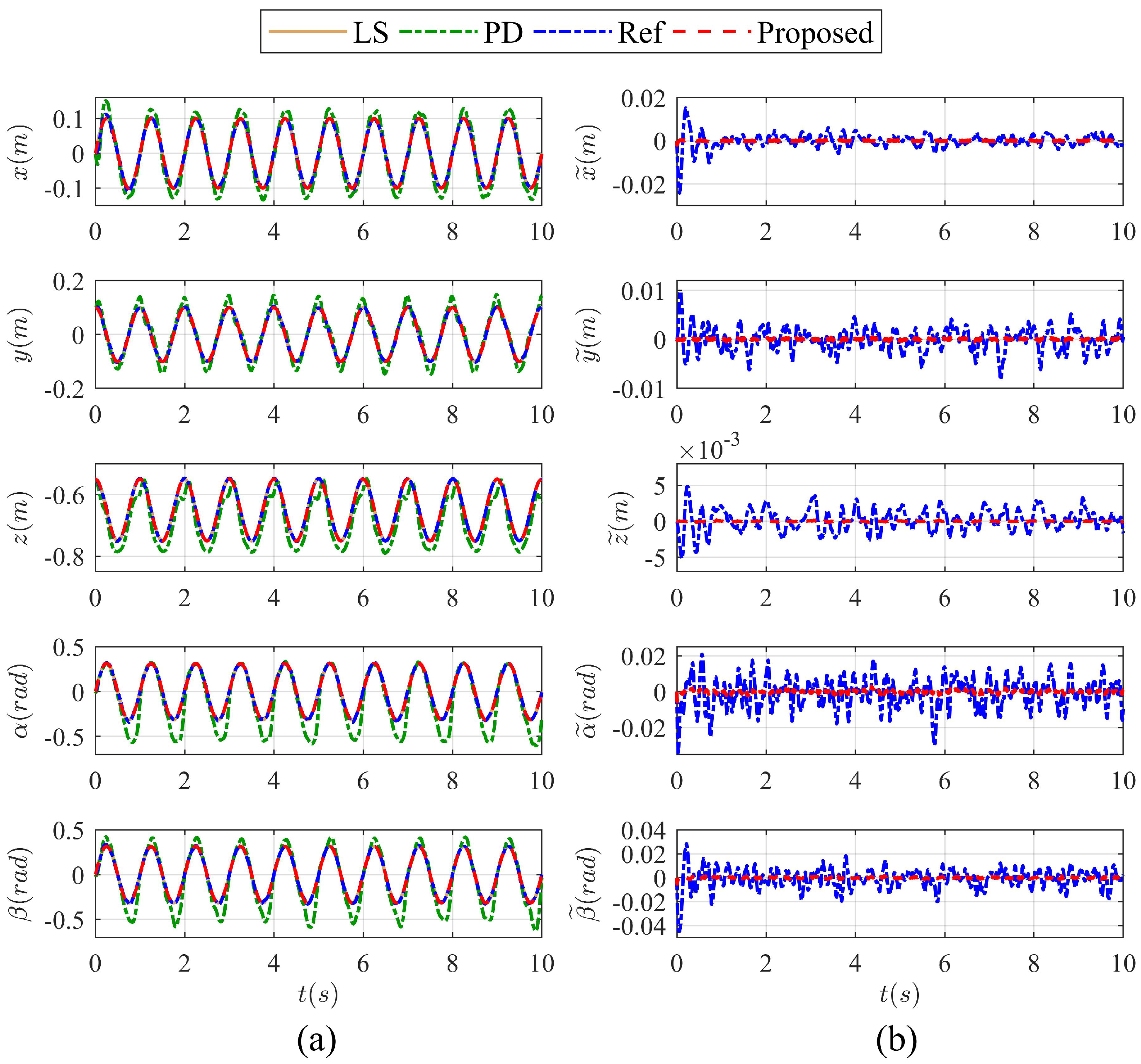
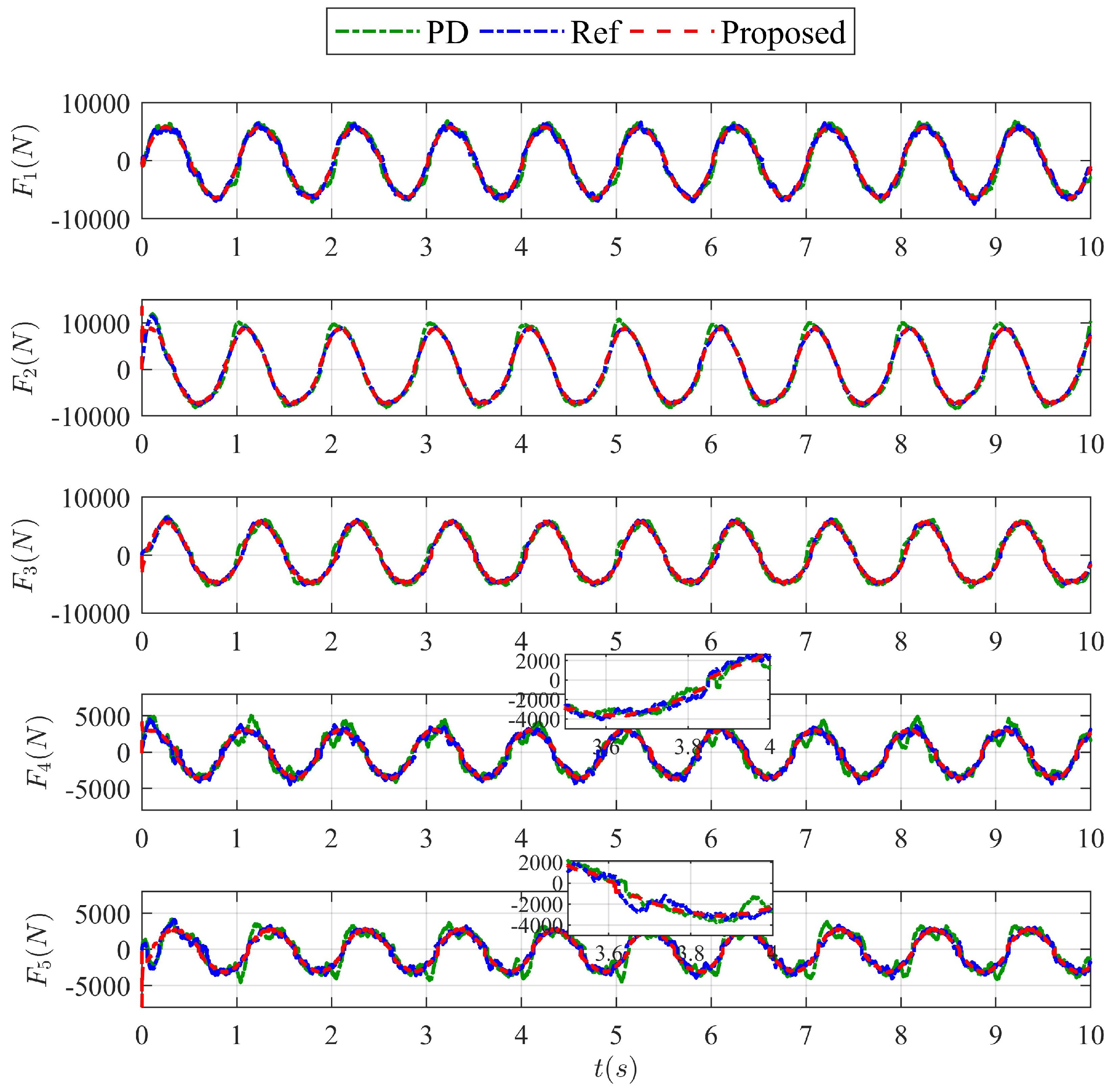
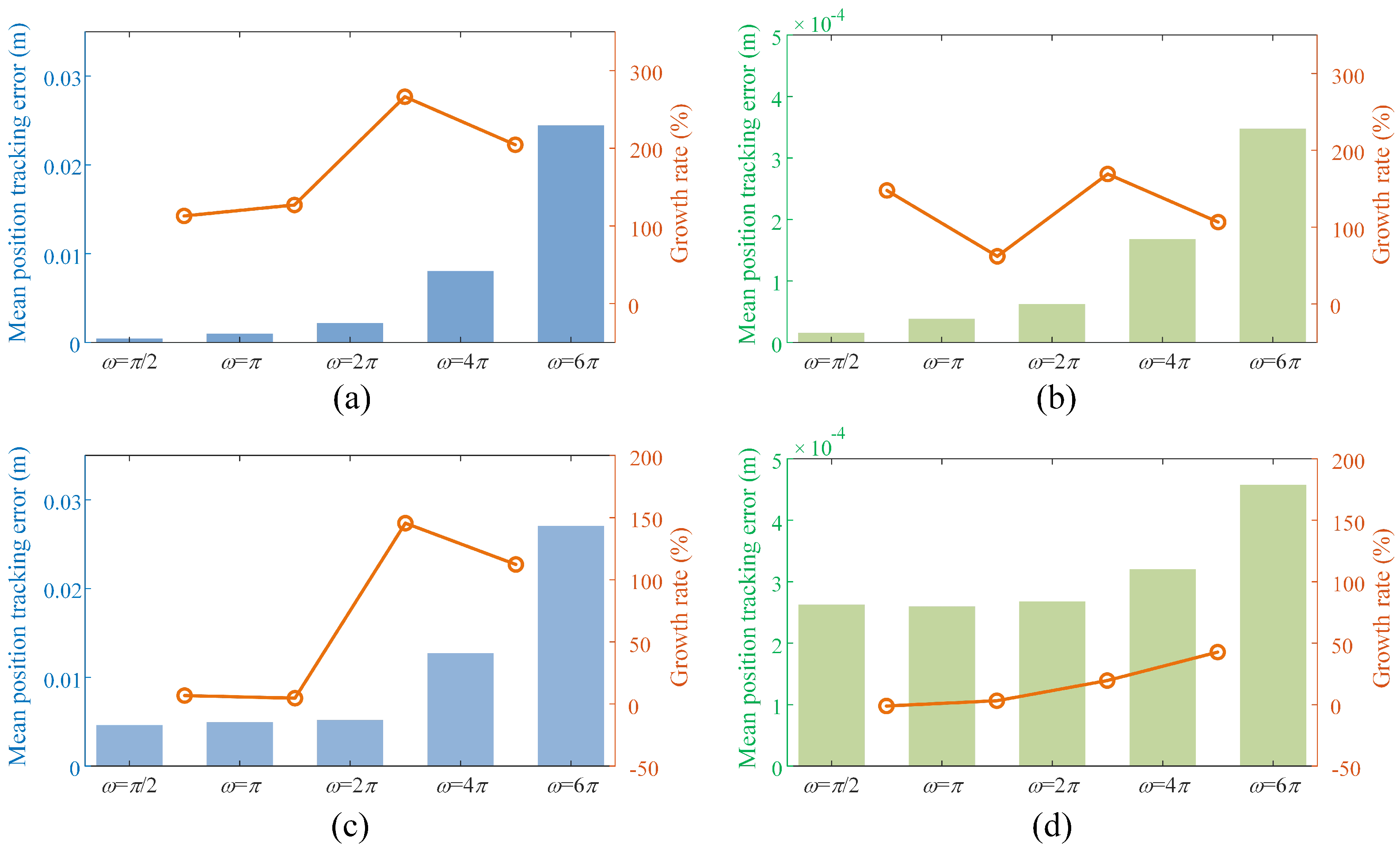
5.3. Numerical Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. The Detailed Expressions of Position of the Key Points
Appendix B. Proof of Equation (25)
Appendix C. Symbolic Derivation of the Dynamic Equation
| Algorithm A1: The symbolic derivation of the inertial matrix |
for to 6 do for to 6 do : Compute end end |
| Algorithm A2: The symbolic derivation of the Coriolis matrix and gravitational terms |
for to 6 do for to 6 do for to 6 do : Compute end end : Compute end |
References
- Liu, X.; Yao, J.; Xu, Y.; Zhao, Y. Research of driving force coordination mechanism in parallel manipulator with actuation redundancy and its performance evaluation. Nonlinear Dyn. 2017, 90, 983–998. [Google Scholar] [CrossRef]
- Luo, X.; Xie, F.; Liu, X.J.; Xie, Z. Kinematic calibration of a 5-axis parallel machining robot based on dimensionless error mapping matrix. Robot. Comput.-Integr. Manuf. 2021, 70, 102115. [Google Scholar] [CrossRef]
- Liu, X.J.; Bi, W.Y.; Xie, F.G. An energy efficiency evaluation method for parallel robots based on the kinetic energy change rate. Sci. China Technol. Sci. 2019, 62, 1035–1044. [Google Scholar] [CrossRef]
- Liu, X.J.; Bi, W.Y.; Xie, F.G. DELTA: A simple and efficient parallel robot. Robotica 1990, 8, 105–109. [Google Scholar]
- Hao, Q.; Guan, L.; Wang, J.; Wang, L. Dynamic feedforward control of a novel 3-PSP 3-DoF parallel manipulator. Chin. J. Mech. Eng. 1990, 24, 676. [Google Scholar] [CrossRef]
- Xin, G.; Deng, H.; Zhong, G. Closed-form dynamics of a 3-DoF spatial parallel manipulator by combining the Lagrangian formulation with the virtual work principle. Nonlinear Dyn. 2016, 86, 1329–1347. [Google Scholar] [CrossRef]
- Zhao, C.; Chen, Z.; Song, J.; Wang, X.; Ding, H. Deformation analysis of a novel 3-DoF parallel spindle head in gravitational field. Mech. Mach. Theory 2020, 154, 104036. [Google Scholar] [CrossRef]
- Abadi, B.N.R.; Farid, M.; Mahzoon, M. Redundancy resolution and control of a novel spatial parallel mechanism with kinematic redundancy. Mech. Mach. Theory 2019, 133, 112–126. [Google Scholar] [CrossRef]
- Ebrahimi, I.; Carretero, J.A.; Boudreau, R. 3-PRRR redundant planar parallel manipulator: Inverse displacement, workspace and singularity analyses. Mech. Mach. Theory 2007, 42, 1007–1016. [Google Scholar] [CrossRef]
- Muralidharan, V.; Bose, A.; Chatra, K.B.; Yopadhyay, S. Methods for dimensional design of parallel manipulators for optimal dynamic performance over a given safe working zone. Mech. Mach. Theory 2020, 147, 103721. [Google Scholar] [CrossRef]
- Xie, Z.; Xie, F.; Liu, X.J.; Wang, J.; Shen, X. Parameter optimization for the driving system of a 5 degrees-of-freedom parallel machining robot with planar kinematic chains. J. Mech. Robot. 2019, 11, 041003. [Google Scholar] [CrossRef]
- Azar, A.T.; Zhu, Q.; Khamis, A.; Zhao, D. Control design approaches for parallel robot manipulators: A review. Int. J. Model. Identif. Control 2017, 28, 199–211. [Google Scholar] [CrossRef]
- Mei, B.; Xie, F.; Liu, X.J.; Yang, C. Elasto-geometrical error modeling and compensation of a five-axis parallel machining robot. Int. J. Model. Identif. Control 2021, 69, 48–61. [Google Scholar] [CrossRef]
- Wu, J.; Wang, J.; Wang, L.; Li, T. Dynamics and control of a planar 3-DoF parallel manipulator with actuation redundancy. Mech. Mach. Theory 2009, 44, 835–849. [Google Scholar] [CrossRef]
- Huang, G.; Zhang, D.; Tang, H.; Kong, L.; Song, S. Analysis and control for a new reconfigurable parallel mechanism. Int. J. Adv. Robot. Syst. 2020, 17, 149–167. [Google Scholar] [CrossRef]
- Niu, X.; Yang, C.; Tian, B.; Li, X.; Han, J.; Agrawal, S.K. Modal decoupled dynamics-velocity feed-forward motion control of multi-DoF robotic spine brace. IEEE Access 2018, 6, 65286–65297. [Google Scholar] [CrossRef]
- Yang, C.; Huang, Q.; Jiang, H.; Peter, O.O.; Han, J. PD control with gravity compensation for hydraulic 6-DoF parallel manipulator. Mech. Mach. Theory 2010, 45, 666–677. [Google Scholar] [CrossRef]
- Chen, Z.; Xu, L.; Zhang, W.; Li, Q. Closed-form dynamic modeling and performance analysis of an over-constrained 2PUR-PSR parallel manipulator with parasitic motions. Nonlinear Dyn. 2019, 96, 517–534. [Google Scholar] [CrossRef]
- Zi, B.; Wang, N.; Qian, S.; Bao, K. Design, stiffness analysis and experimental study of a cable-driven parallel 3D printer. Mech. Mach. Theory 2019, 132, 207–222. [Google Scholar] [CrossRef]
- Chai, X.; Wang, M.; Xu, L.; Ye, W. Dynamic modeling and analysis of a 2PRU-UPR parallel robot based on screw theory. IEEE Access 2020, 8, 78868–78878. [Google Scholar] [CrossRef]
- Yang, C.; Han, J.; Zheng, S.; Ogbobe Peter, O. Dynamic modeling and computational efficiency analysis for a spatial 6-DoF parallel motion system. Nonlinear Dyn. 2012, 67, 1007–1022. [Google Scholar] [CrossRef]
- Xie, Z.; Xie, F.; Liu, X.J.; Wang, J.; Mei, B. Tracking error prediction informed motion control of a parallel machine tool for high-performance machining. Int. J. Mach. Tools Manuf. 2021, 164, 103714. [Google Scholar] [CrossRef]
- Abdellatif, H.; Heimann, B. Advanced model-based control of a 6-DoF hexapod robot: A case study. IEEE/ASME Trans. Mechatronics 2009, 15, 269–279. [Google Scholar] [CrossRef]
- Antonov, A.; Fomin, A.; Glazunov, V.; Kiselev, S.; Carbone, G. Inverse and forward kinematics and workspace analysis of a novel 5-DoF (3T2R) parallel–serial (hybrid) manipulator. Int. J. Adv. Robot. Syst. 2021, 18, 1729881421992963. [Google Scholar] [CrossRef]
- Sun, T.; Yang, S. An approach to formulate the Hessian matrix for dynamic control of parallel robots. IEEE/ASME Trans. Mechatron. 2019, 24, 271–281. [Google Scholar] [CrossRef]
- Zubizarreta, A.; Cabanes, I.; Marcos, M.; Pinto, C. A redundant dynamic model of parallel robots for model-based control. Robotica 2013, 31, 203–216. [Google Scholar] [CrossRef]
- Nanua, P.; Waldron, K.J.; Murthy, V. Direct kinematic solution of a Stewart platform. IEEE Trans. Robot. Autom. 1990, 6, 438–444. [Google Scholar] [CrossRef]
- Choi, H.B.; Konno, A.; Uchiyama, M. Closed-form forward kinematics solutions of a 4-DoF parallel robot. Int. J. Control Autom. Syst. 2009, 7, 858–864. [Google Scholar] [CrossRef]
- Nouri, R.; Abadi, B.; Carretero, J.A. Modeling and Real-Time Motion Planning of a Class of Kinematically Redundant Parallel Mechanisms With Reconfigurable Platform. J. Mech. Robot. 2023, 15, 021004. [Google Scholar] [CrossRef]
- Zhang, D.; Lei, J. Kinematic analysis of a novel 3-DoF actuation redundant parallel manipulator using artificial intelligence approach. Robot. Comput.-Integr. Manuf. 2011, 27, 157–163. [Google Scholar] [CrossRef]
- Parikh, P.J.; Lam, S.S. Solving the forward kinematics problem in parallel manipulators using an iterative artificial neural network strategy. Int. J. Adv. Manuf. Technol. 2009, 40, 595–606. [Google Scholar] [CrossRef]
- Xie, F.; Liu, X.J.; Wang, J.; Wabner, M. Kinematic optimization of a five degrees-of-freedom spatial parallel mechanism with large orientational workspace. J. Mech. Robot. 2017, 9, 051005. [Google Scholar] [CrossRef]
- Xie, F.; Liu, X.J.; Luo, X.; Wabner, M. Mobility, singularity, and kinematics analyses of a novel spatial parallel mechanism. J. Mech. Robot. 2016, 8, 061022. [Google Scholar] [CrossRef]
- Hagiwara, K.; Fukumizu, K. Relation between weight size and degree of over-fitting in neural network regression. Neural Netw. 2008, 21, 48–58. [Google Scholar] [CrossRef] [PubMed]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geometrical Parameter | Value | Physical Parameter | Value |
|---|---|---|---|
| 1.500 (m) | 34.443 (kg) | ||
| H | 0.300 (m) | 5.756 (kg) | |
| 0.600 (m) | 15.000 (kg) | ||
| 0.065 (m) | 0.145 () | ||
| 0.063 (m) | 1.079 () | ||
| 0.750 (m) | 0.419 () | ||
| / | / | 0.088 () | |
| / | / | 0.419 () |
| Description | Range |
|---|---|
| Range of | |
| Range of | |
| Range of | |
| Range of | |
| Range of |
| Symbol | Maximum Error | MSE |
|---|---|---|
| x(m) | ||
| y(m) | ||
| z(m) | ||
| (rad) | ||
| (rad) | ||
| (m) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, D.; Xie, Z.; Sun, X.; Zhang, S. Dynamic Modeling and Model-Based Control with Neural Network-Based Compensation of a Five Degrees-of-Freedom Parallel Mechanism. Machines 2023, 11, 195. https://doi.org/10.3390/machines11020195
Guo D, Xie Z, Sun X, Zhang S. Dynamic Modeling and Model-Based Control with Neural Network-Based Compensation of a Five Degrees-of-Freedom Parallel Mechanism. Machines. 2023; 11(2):195. https://doi.org/10.3390/machines11020195
Chicago/Turabian StyleGuo, Dingxu, Zenghui Xie, Xiuting Sun, and Shu Zhang. 2023. "Dynamic Modeling and Model-Based Control with Neural Network-Based Compensation of a Five Degrees-of-Freedom Parallel Mechanism" Machines 11, no. 2: 195. https://doi.org/10.3390/machines11020195