

Integrated Adhesion Coefficient Estimation of 3D Road Surfaces Based on Dimensionless Data-Driven Tire Model

Abstract
:1. Introduction
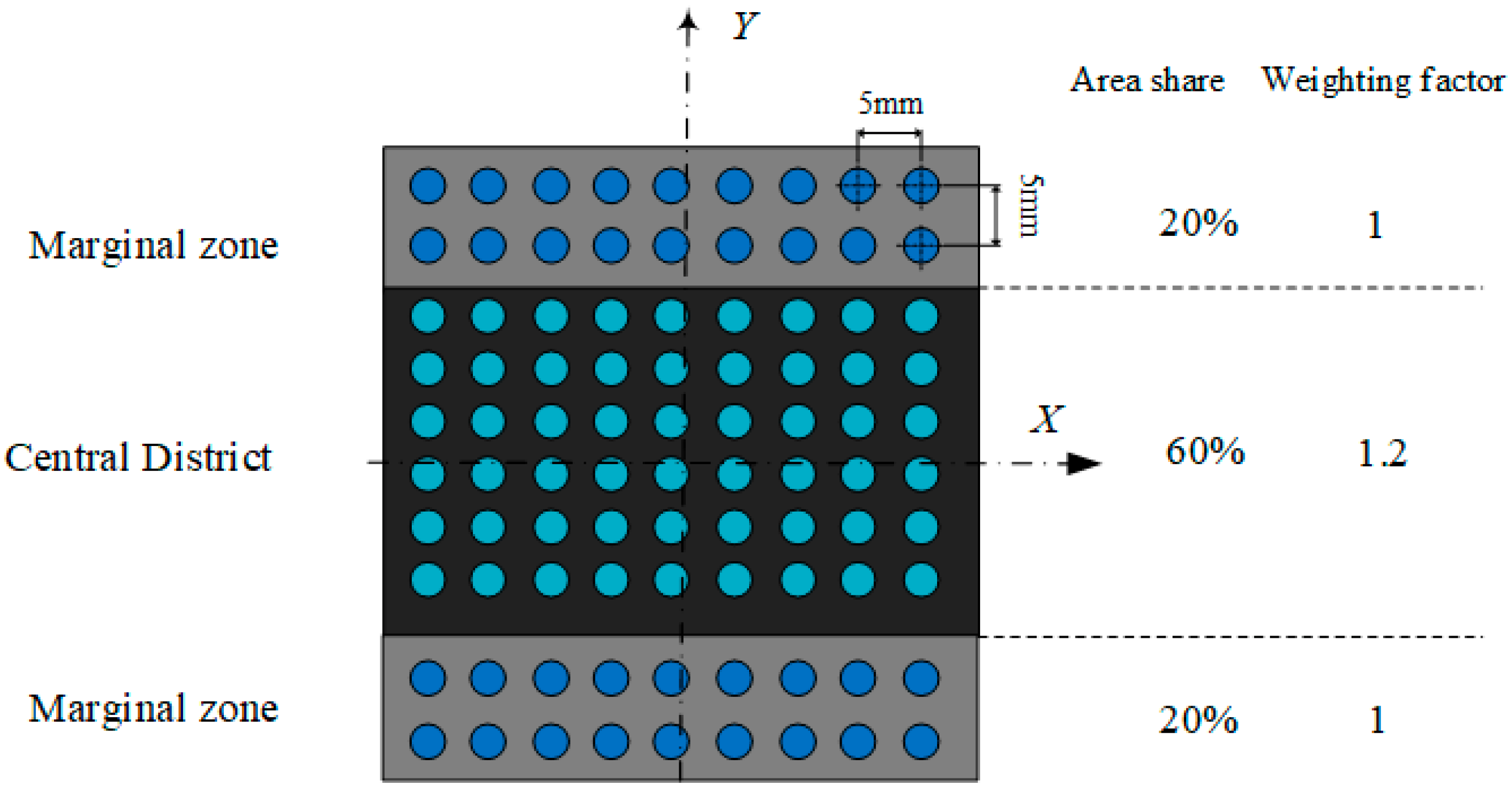
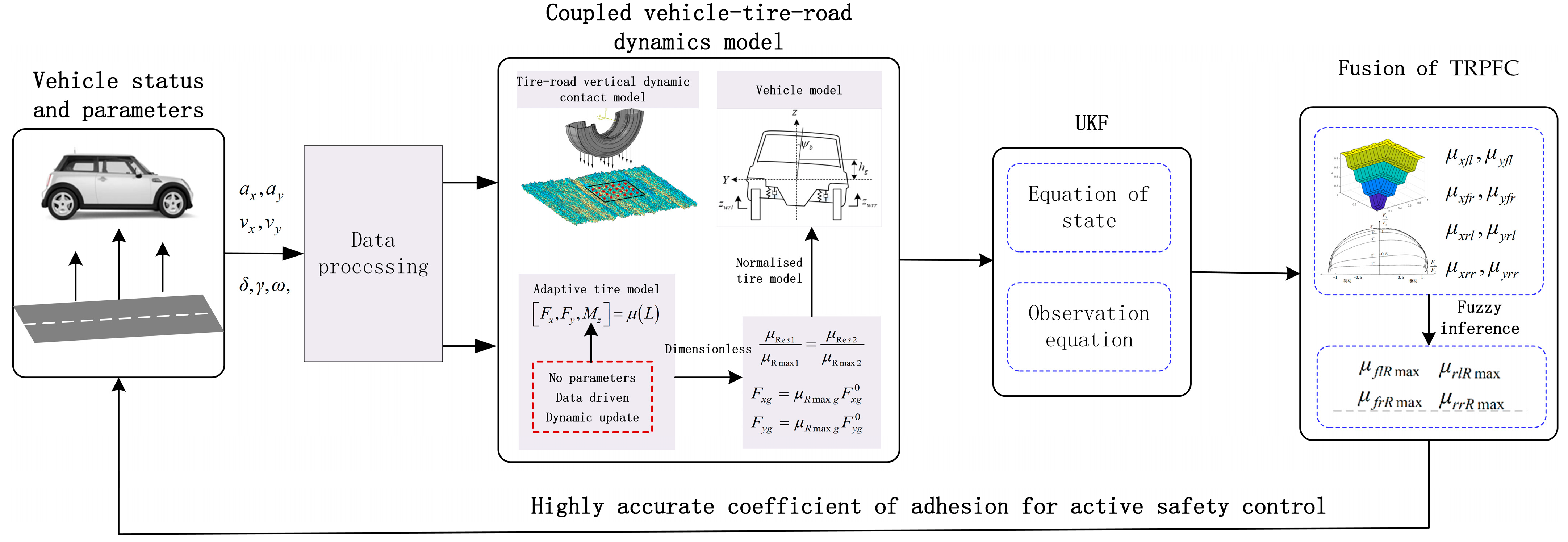
- To describe the pavement excitation more accurately, the stress distribution pattern between the tire/road and the mechanical properties of the multi-point contact are considered in the model of the vertical dynamics.
- In order to address the parameter identification problem of the traditional tire model, a new dimensionless data-driven tire model is proposed to represent the dynamic friction relationship between the three-dimensional road surface and the tire.
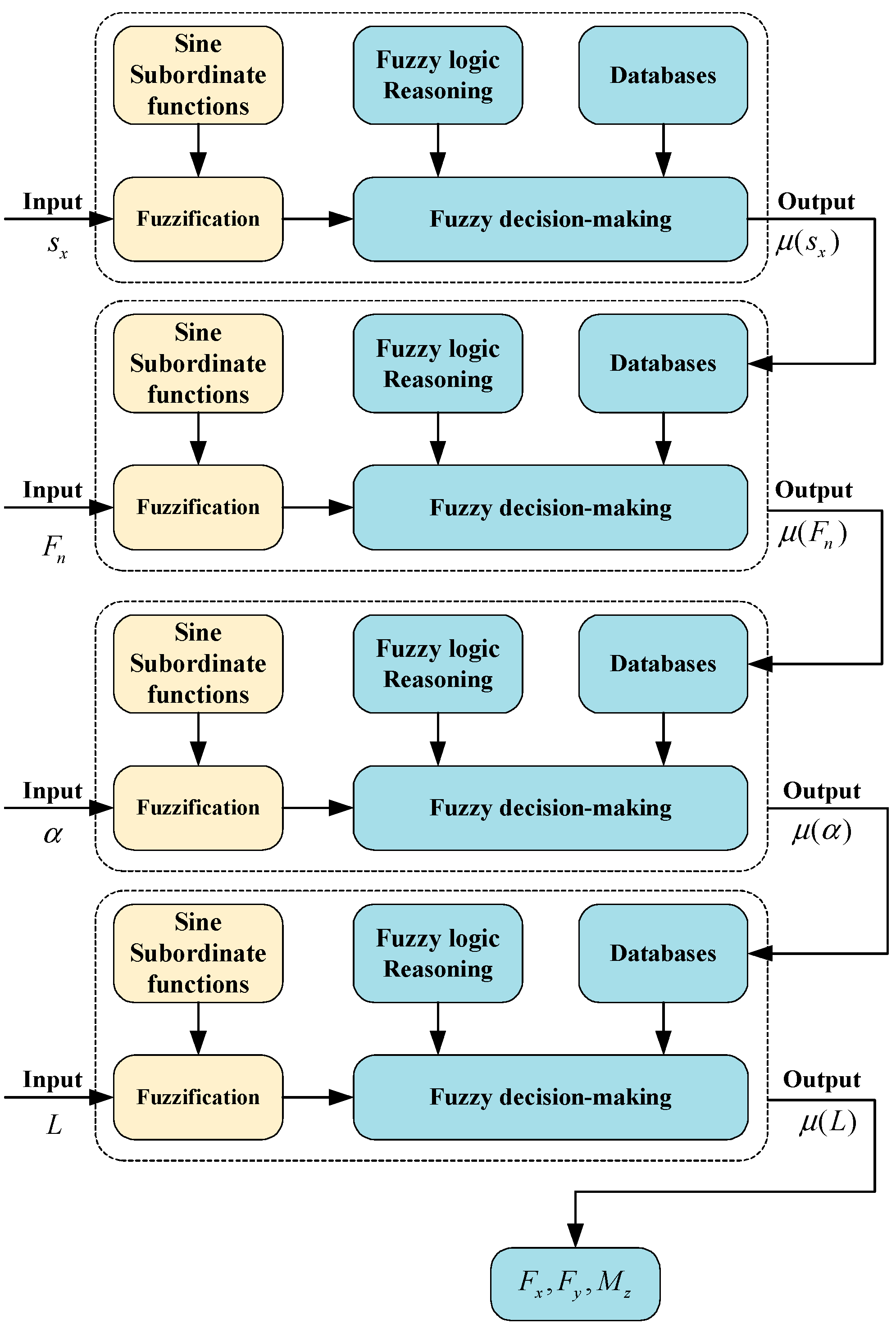
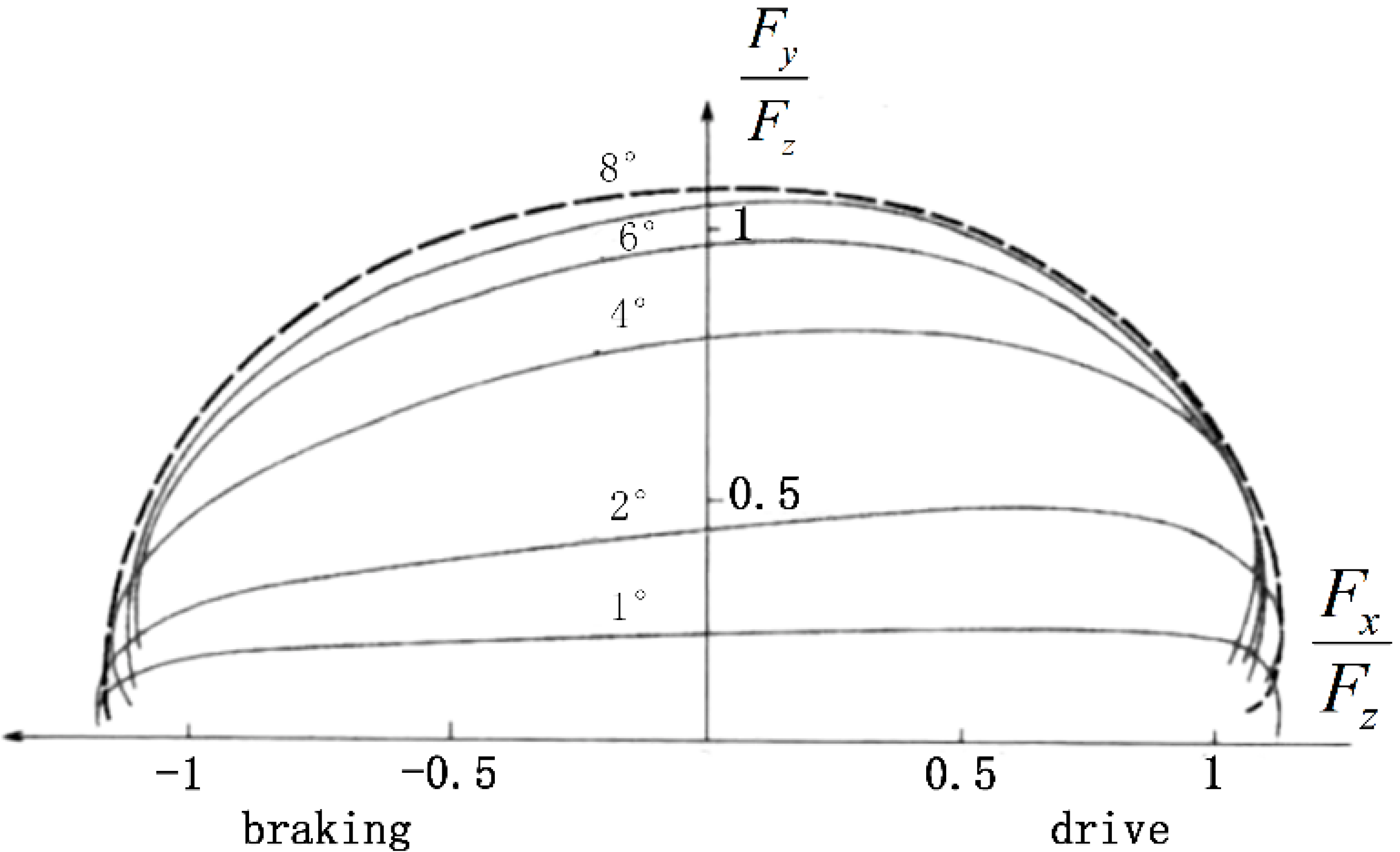
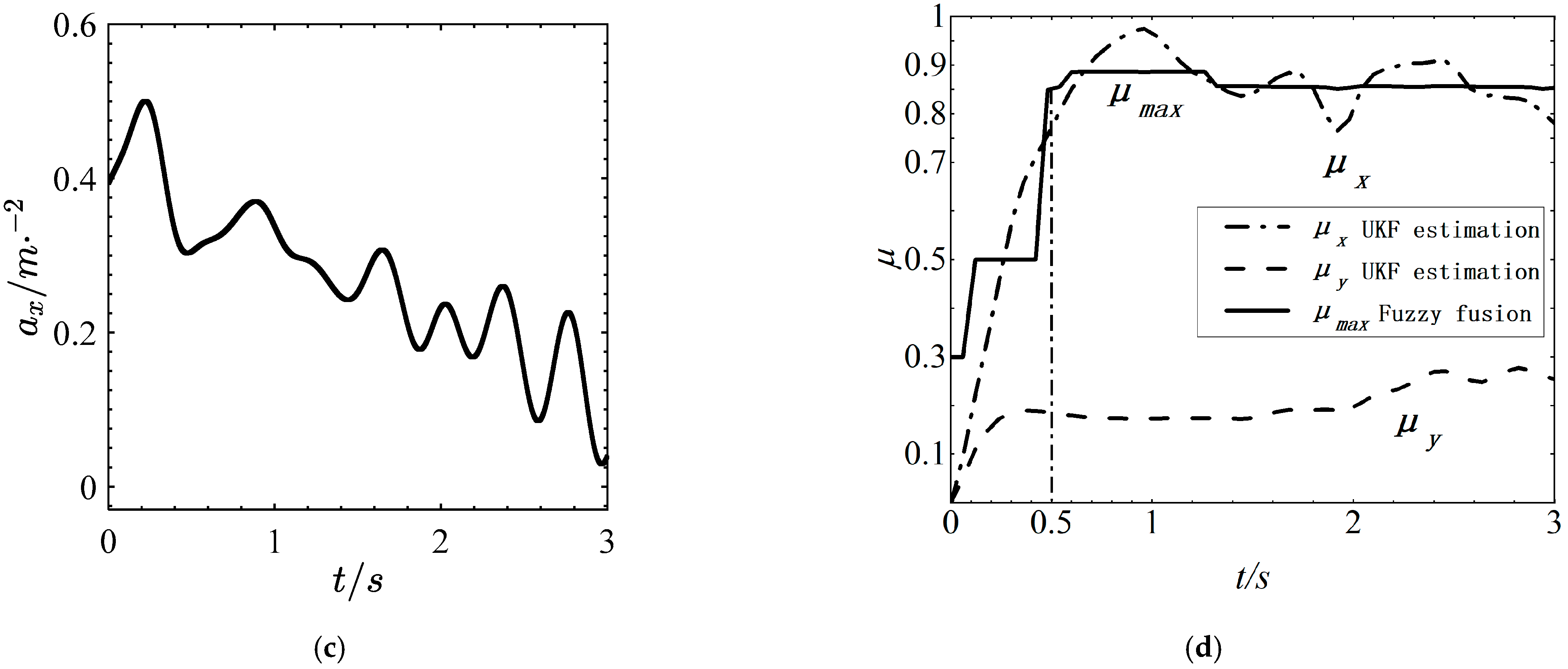
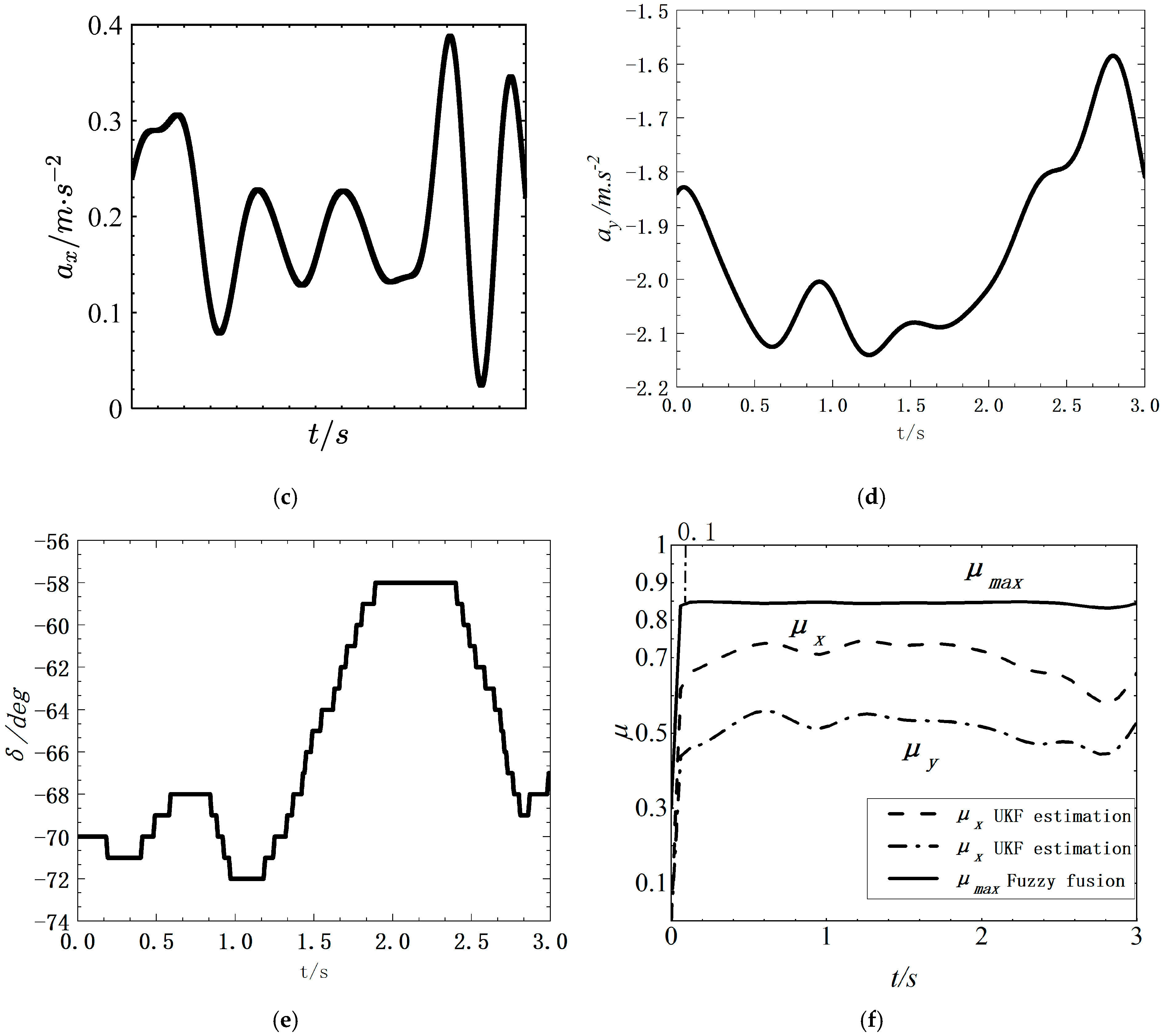
- To estimate the integrated adhesion coefficients. According to the coupling relationship between the longitudinal and lateral adhesion coefficients, the fuzzy inference strategy is adopted to fuse the longitudinal tire adhesion coefficients and lateral tire adhesion coefficients obtained from the UKF algorithm.
2. Modeling of Vehicle/Tire/Road Interactions
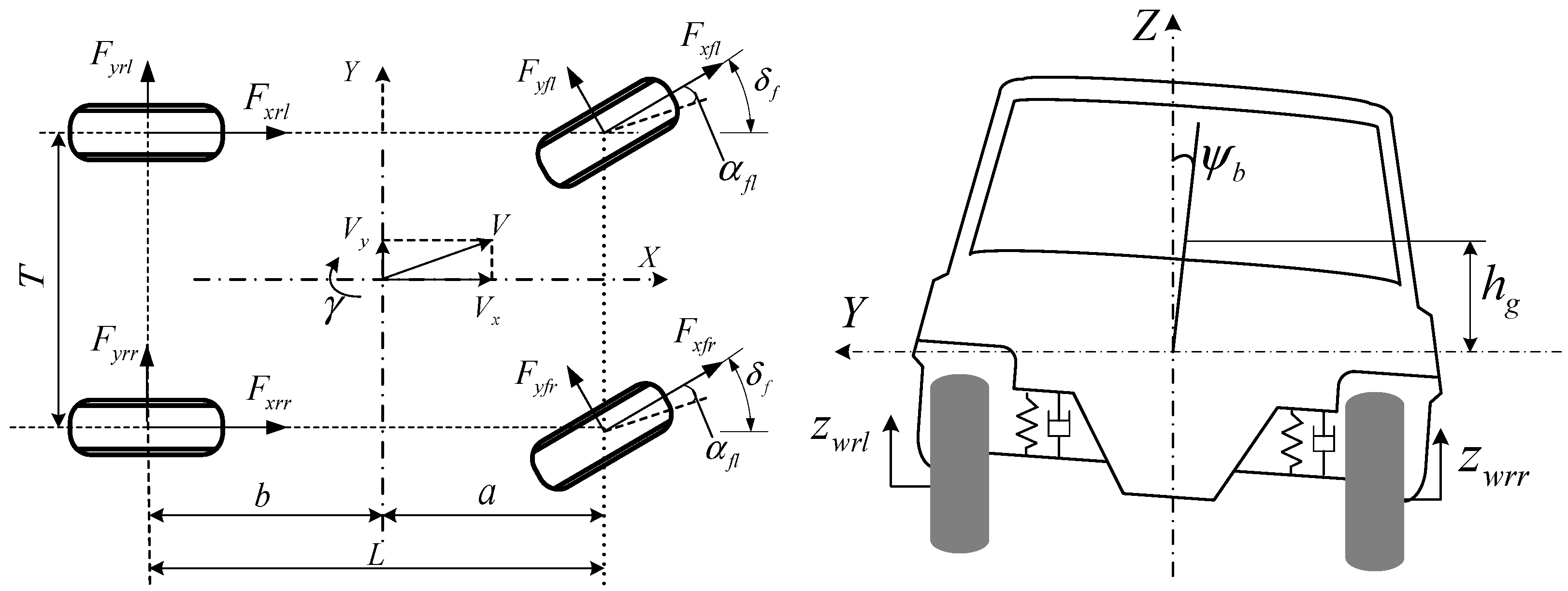
2.1. Vehicle Planar Dynamic Model
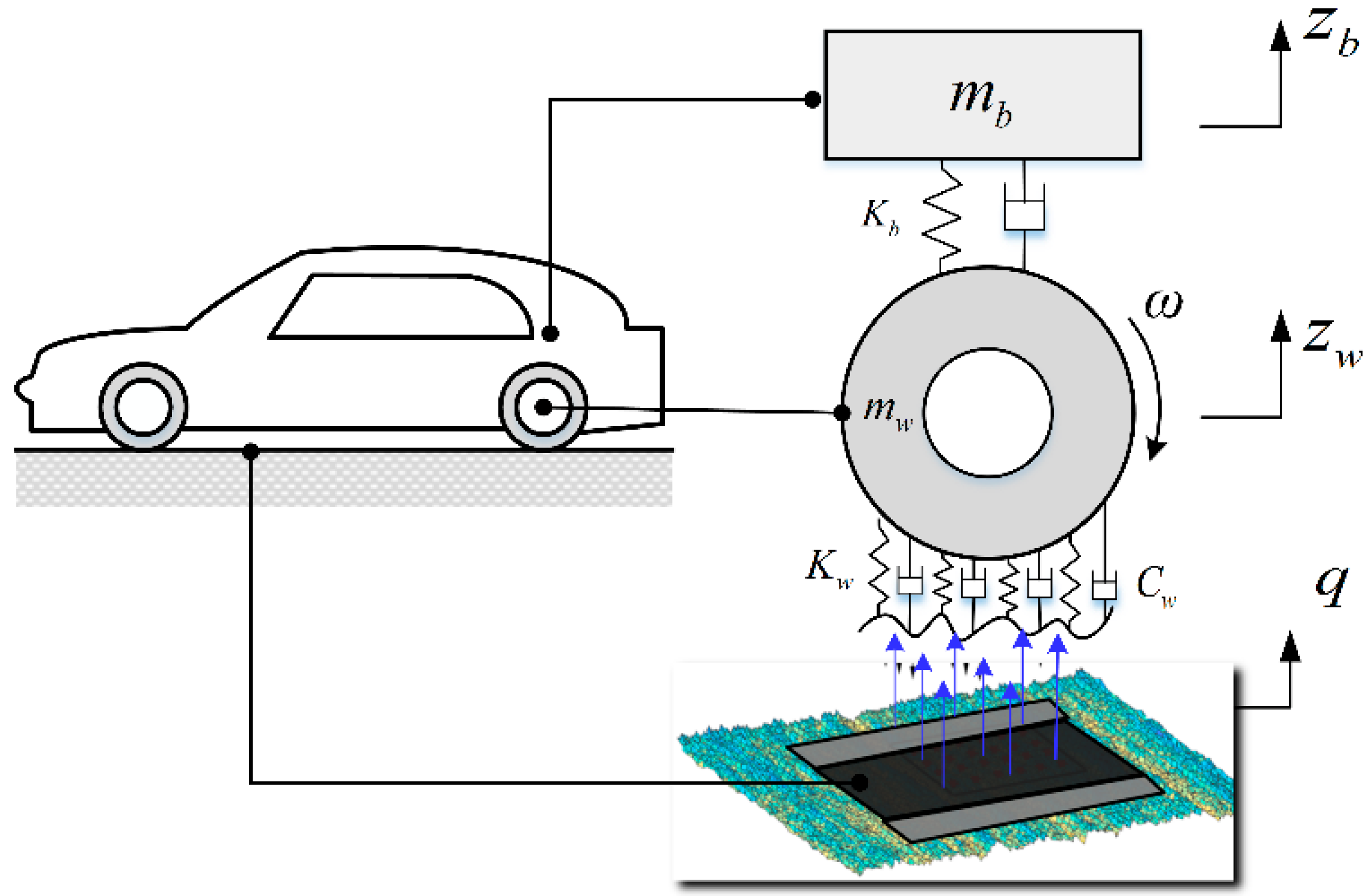
2.2. Vertical Dynamic Model
2.3. Adaptive Parameter-Free Tire Model Based on Data Driven
2.3.1. Tire Model
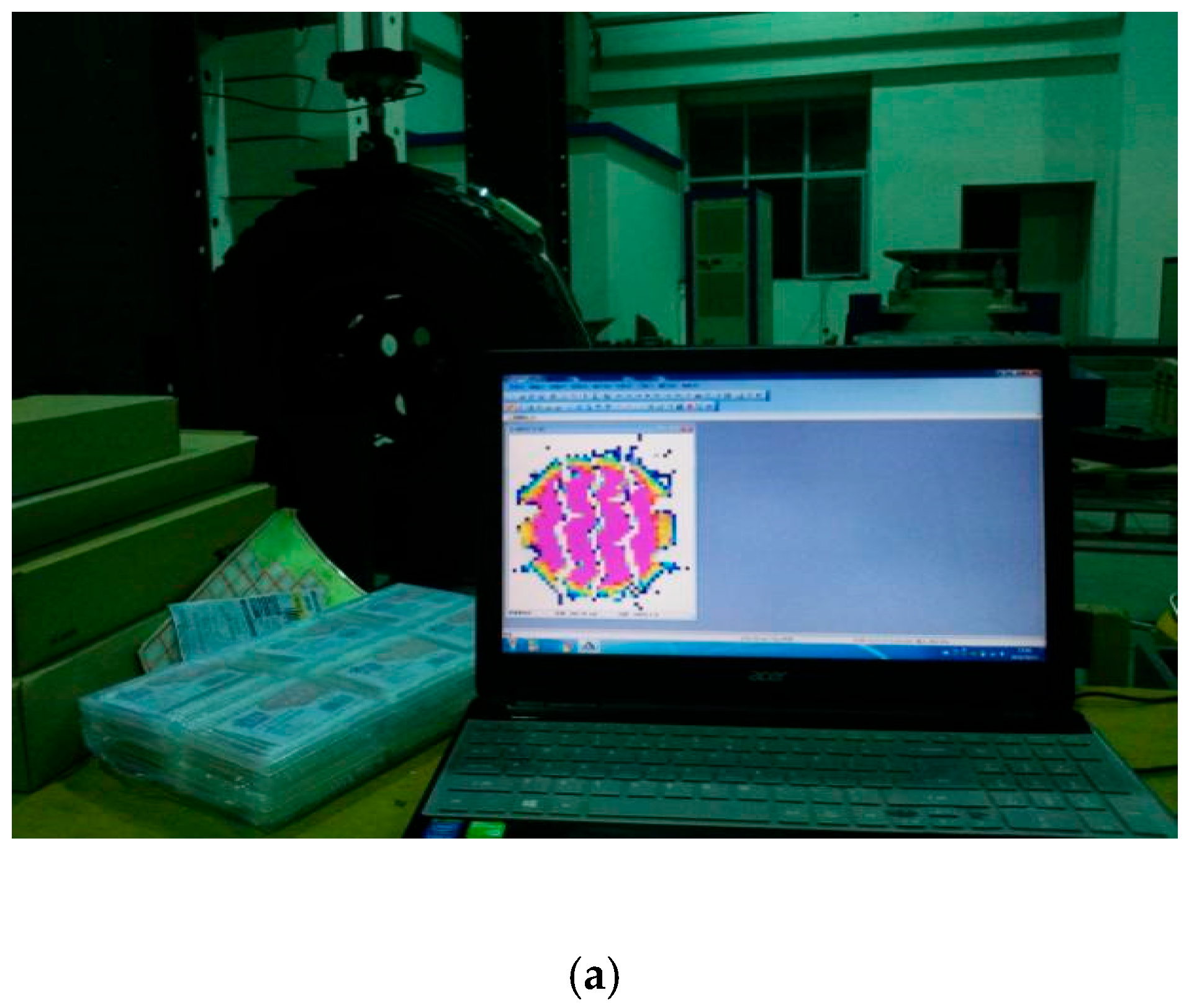
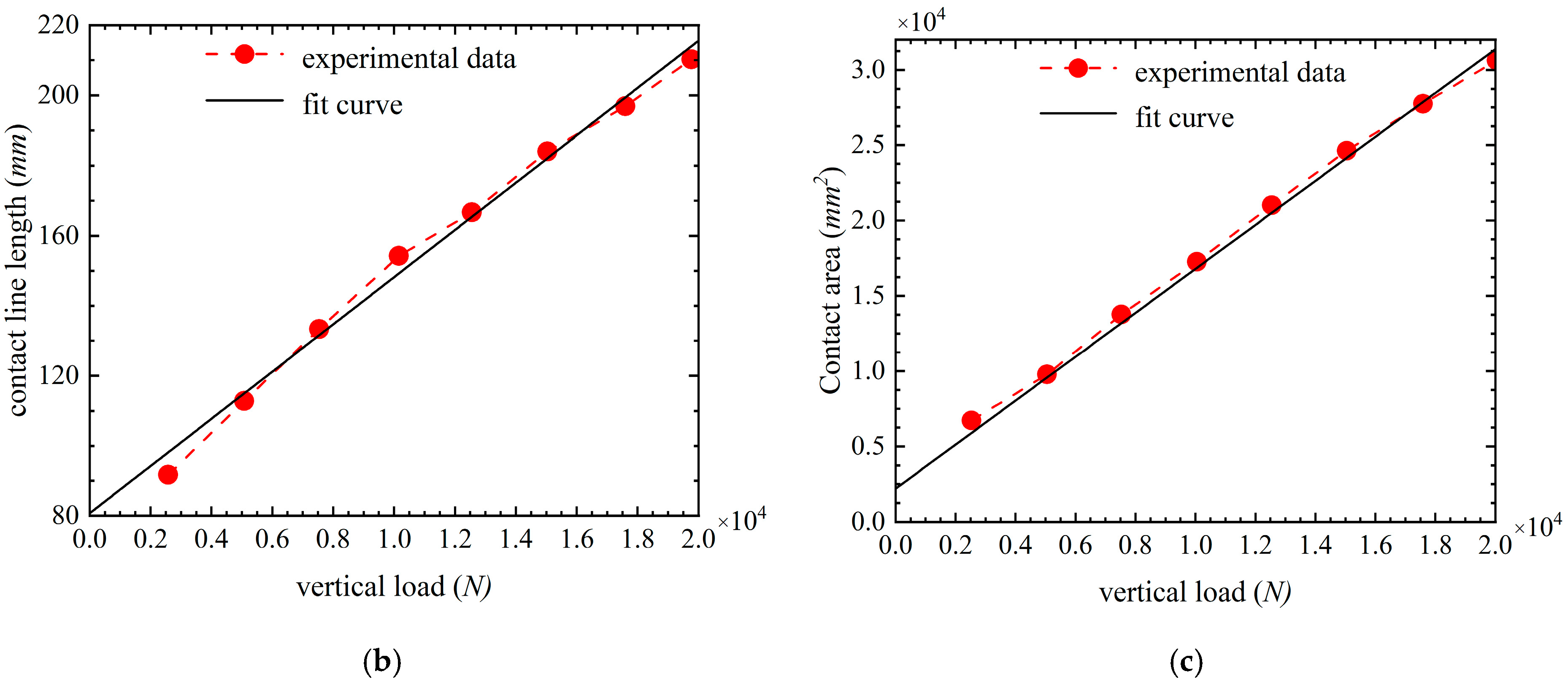
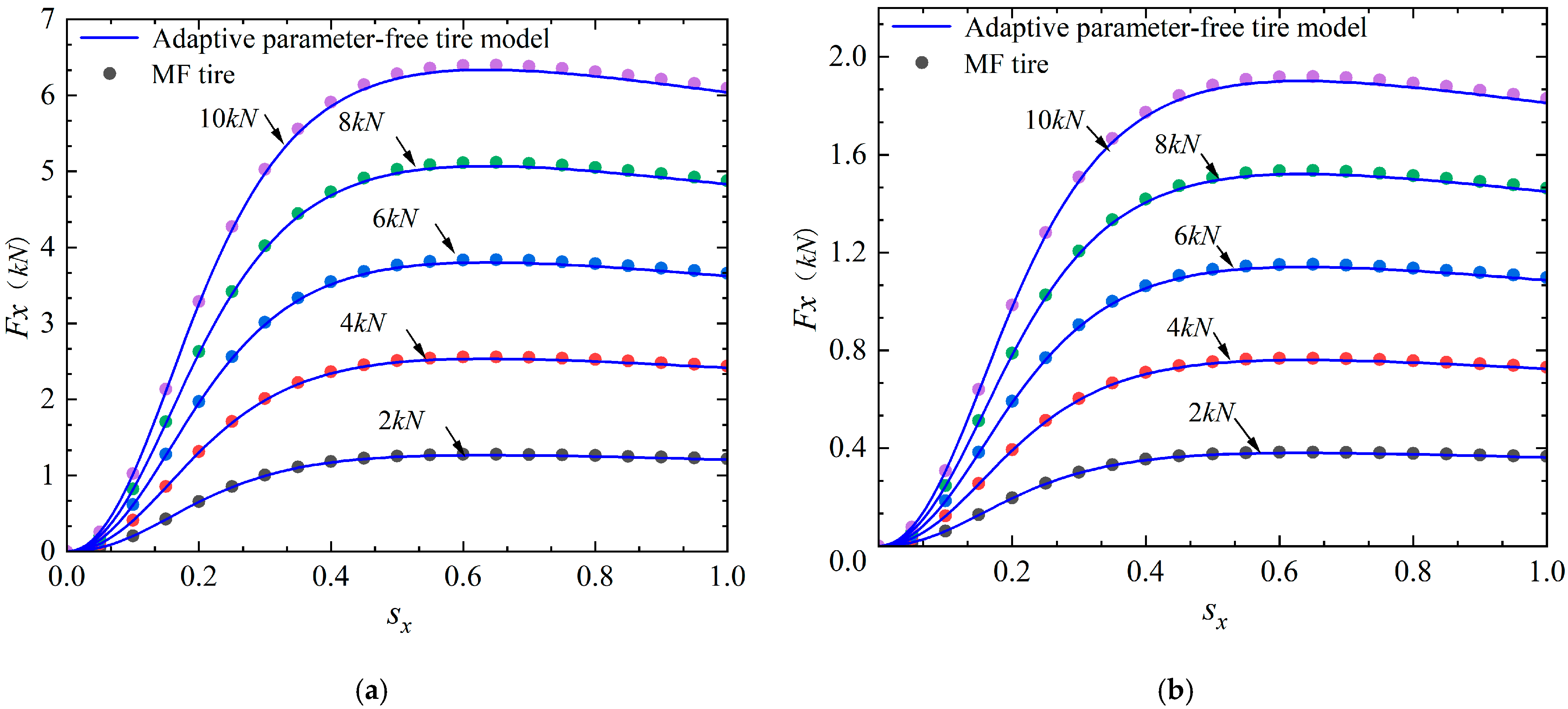
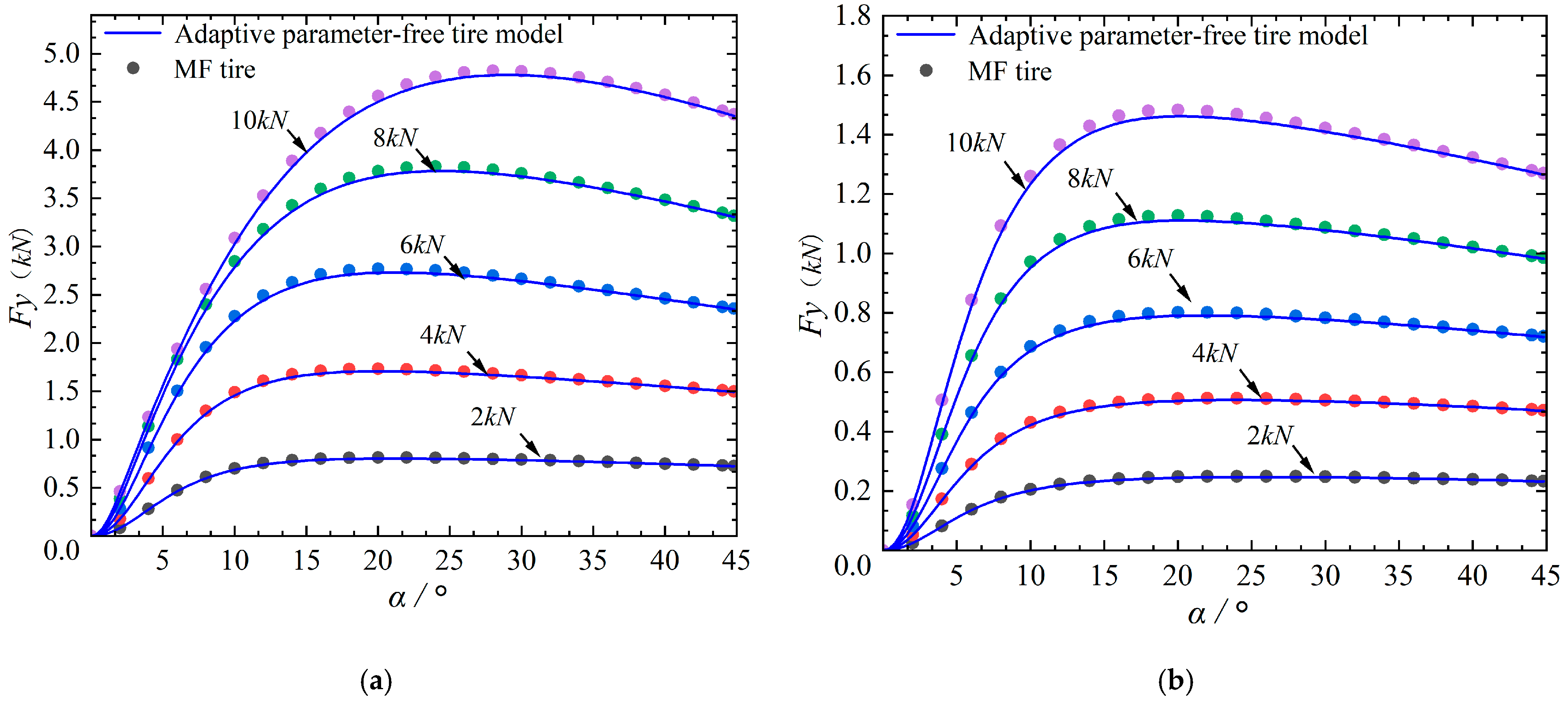
2.3.2. Tire Model Verification
- Although the model does not need to establish complex formulas and fit parameters, it can also use various factors as input conditions (pattern, temperature, speed, pressure, meridian and lateral stiffness, tire size, tire pressure, etc.). Still, it is necessary to measure the experimental data of tire mechanical characteristics under the above conditions as a database for fuzzy operation of the model. However, the actual working conditions of tires are complex and changeable, and it takes a massive amount of test work to express the mechanical characteristics of tires fully.
- The accuracy of the experimental data on tire mechanical characteristics significantly influences the model.
3. Adaptive Estimation of the TRPFC
3.1. Total Estimation Strategy

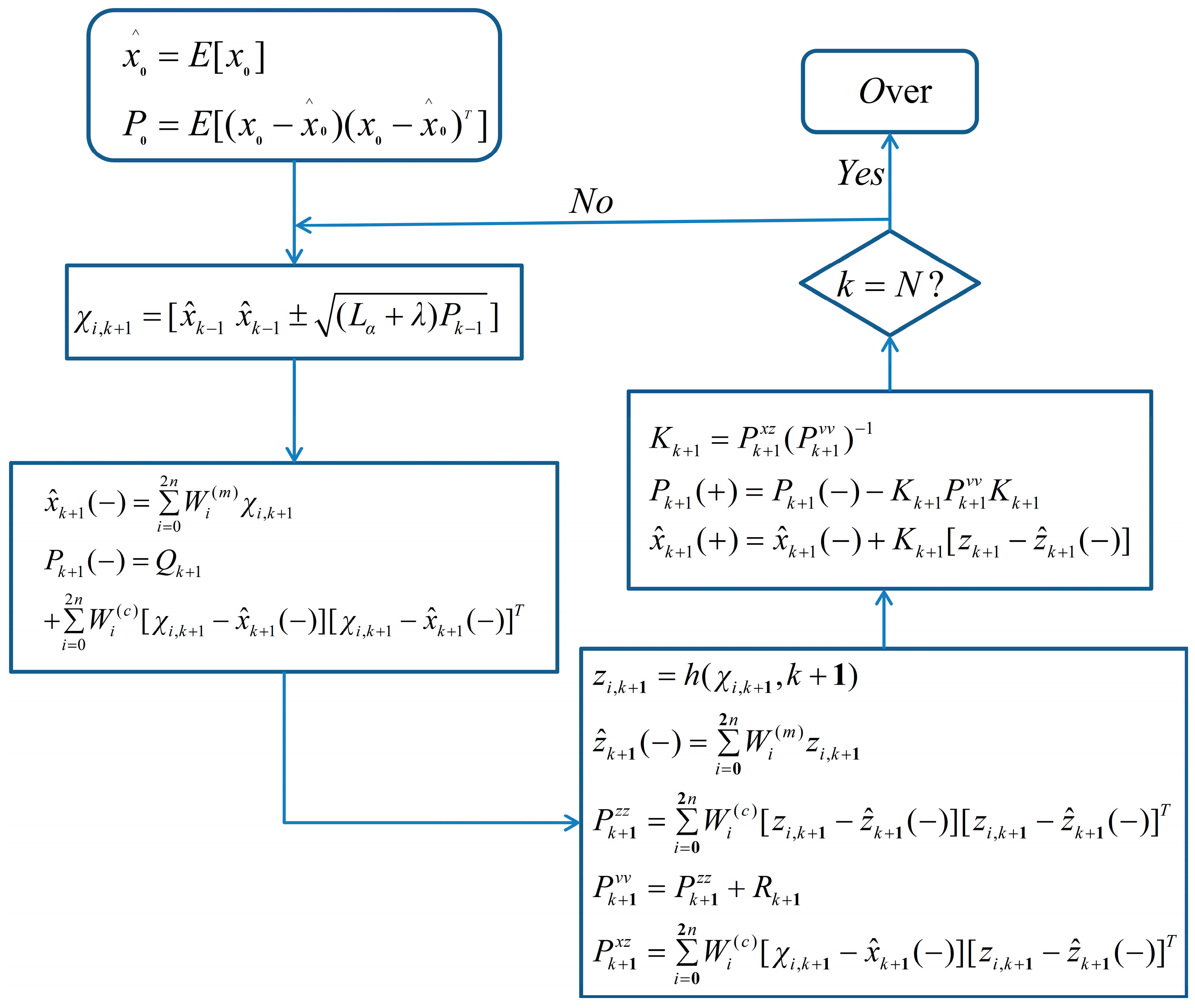
3.2. The TRPFC of Longitudinal and Lateral Force Estimation Algorithm Based on UKF
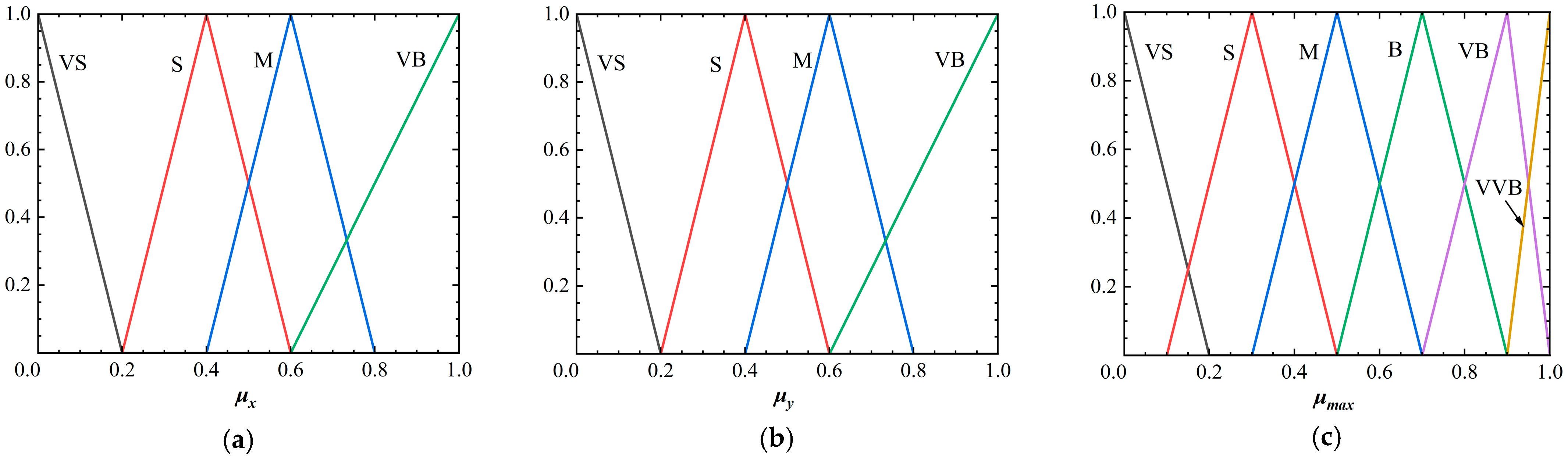
3.3. Integrated Attachment Coefficient Fusion Strategy
4. Simulation Test
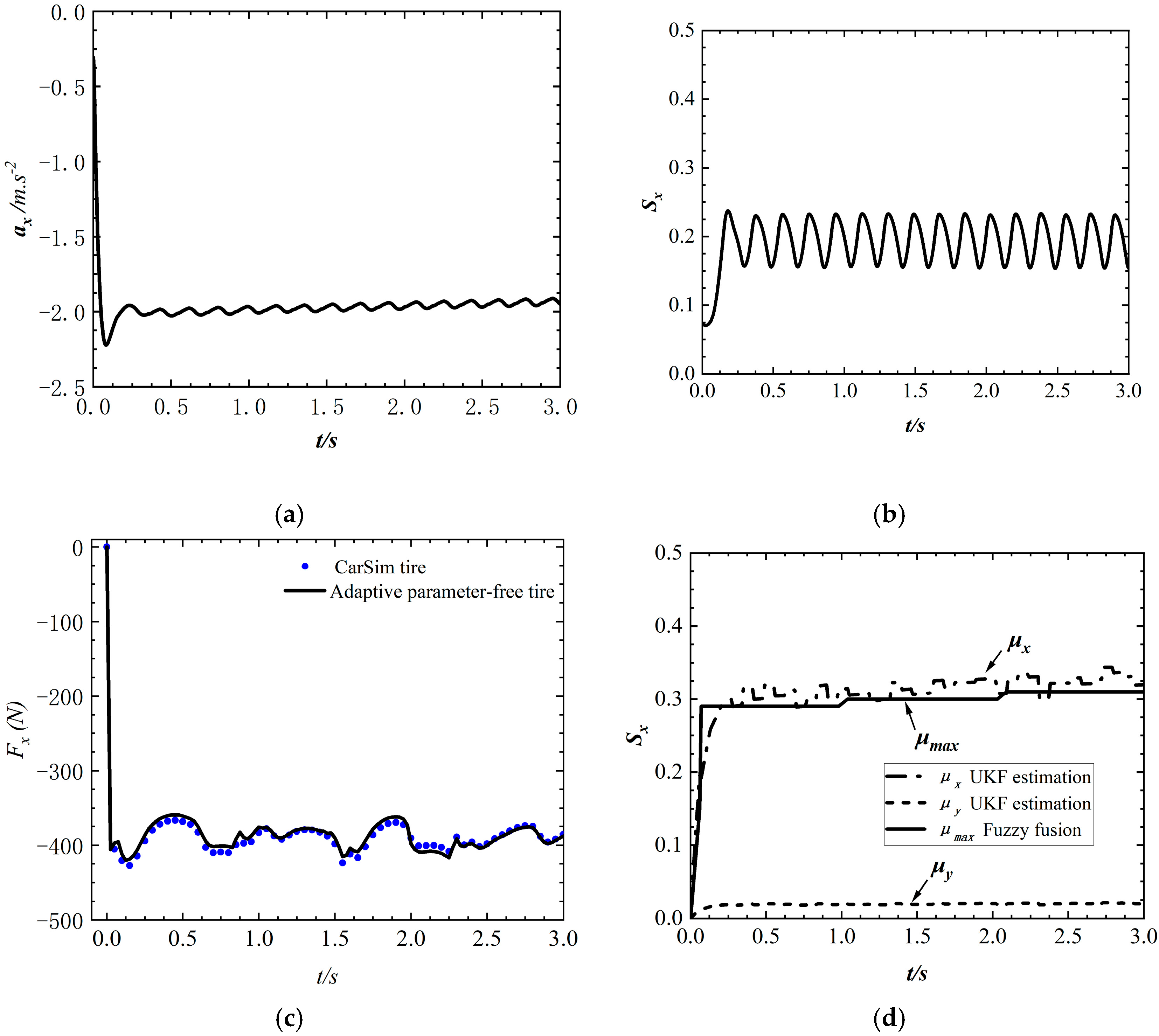
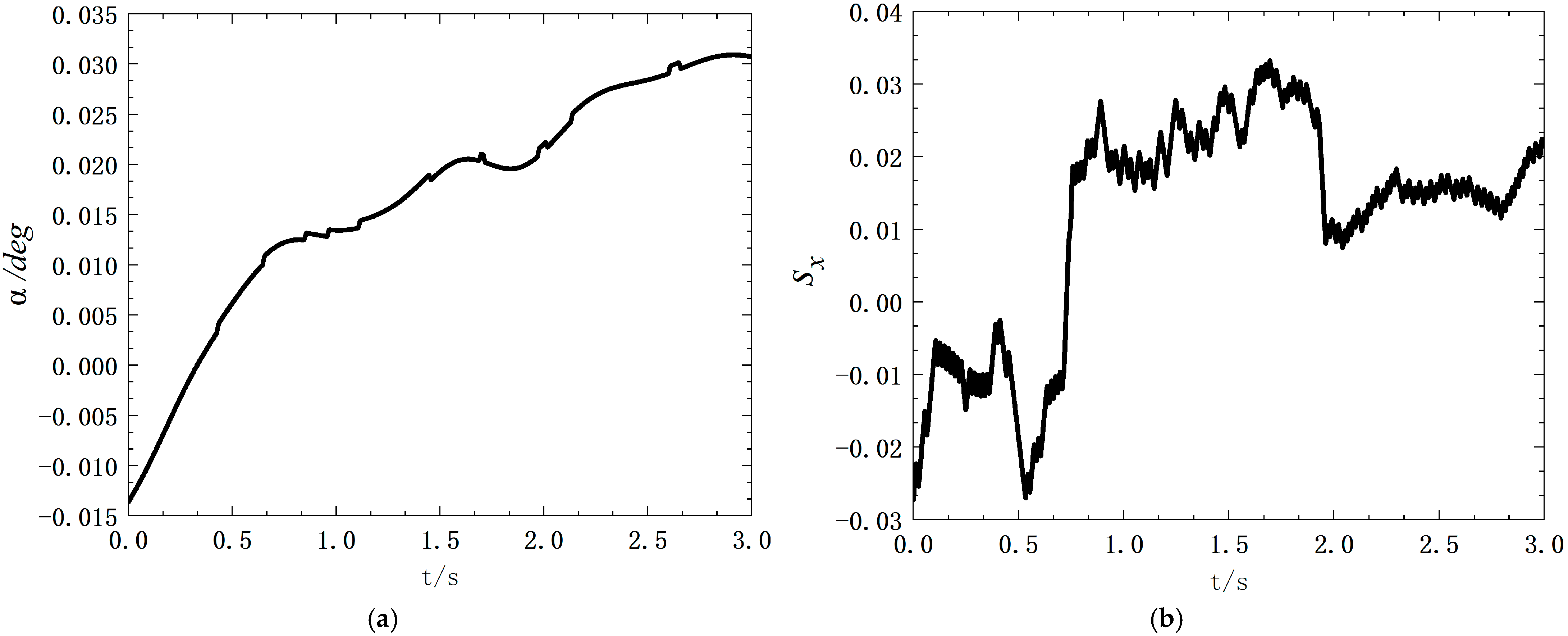
4.1. Straight Line Test
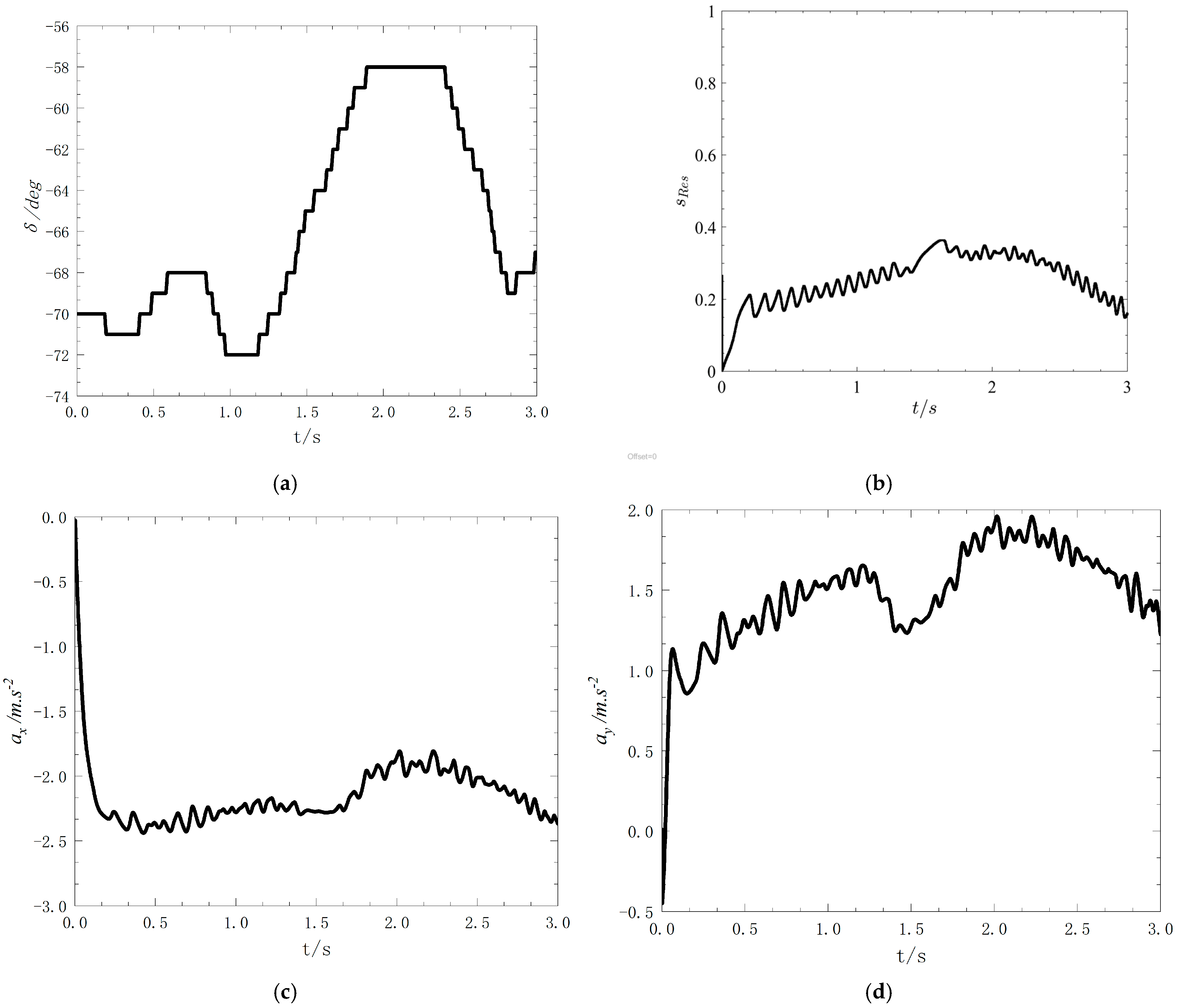
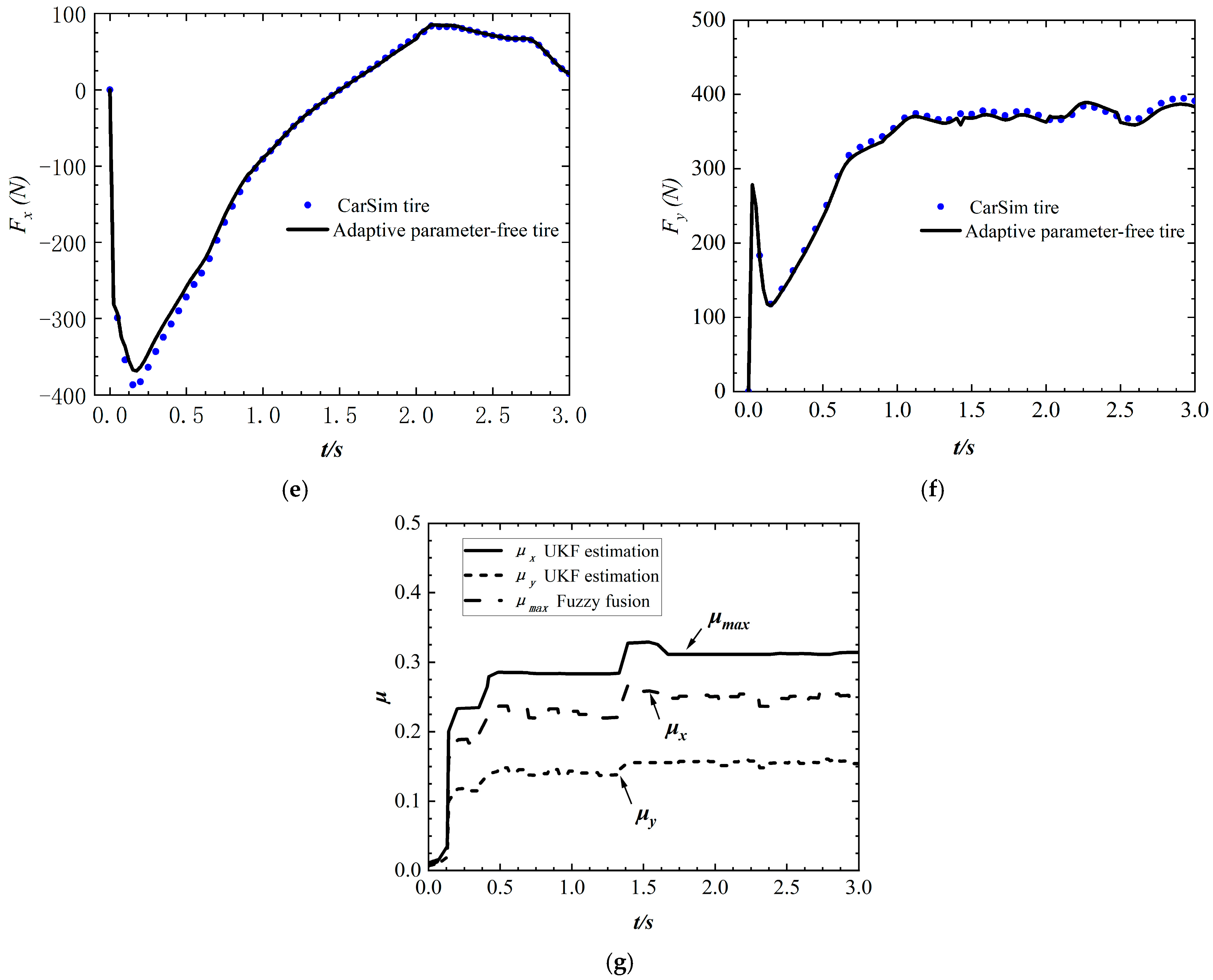
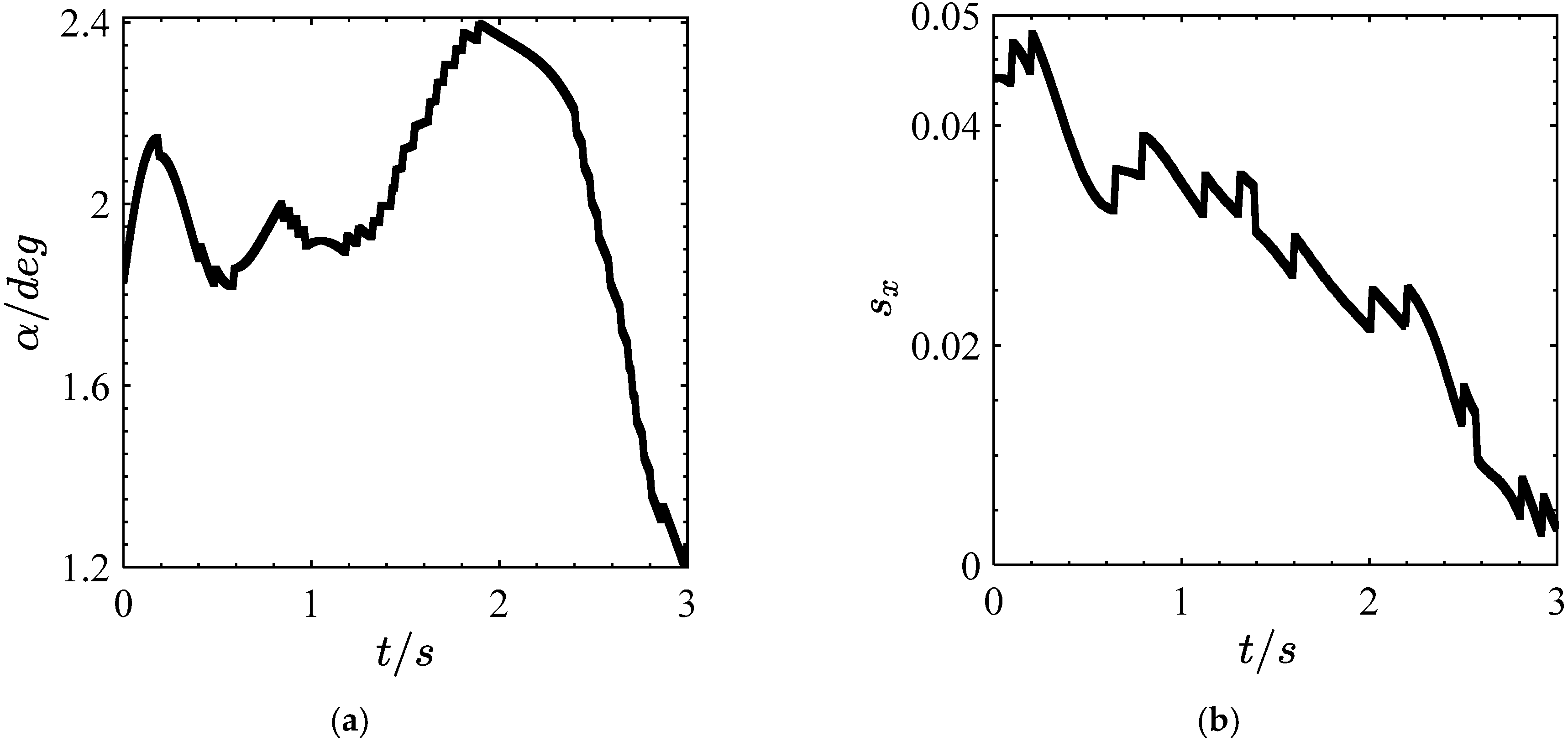
4.2. Curved Test
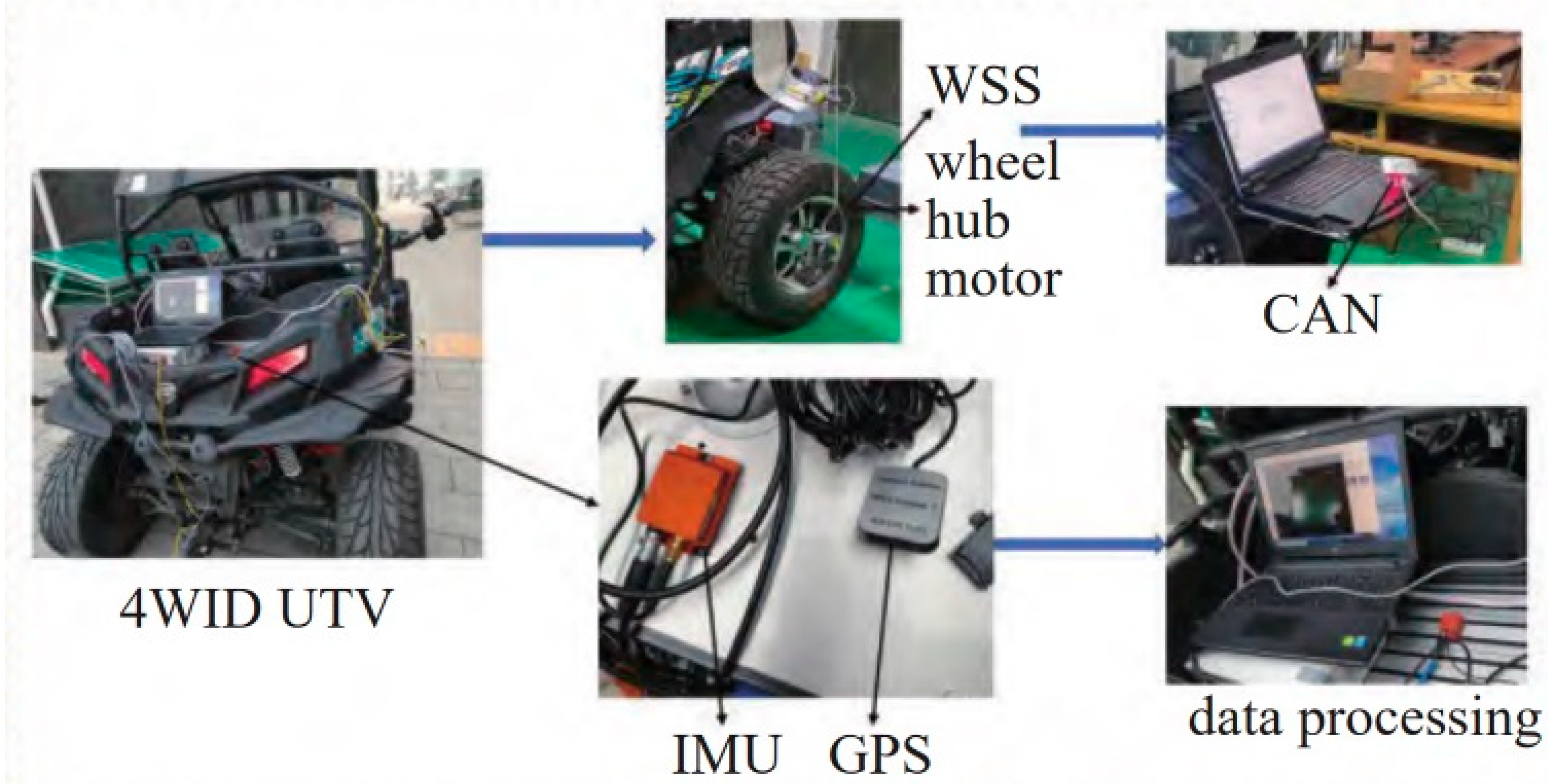
5. Real Vehicle Test
5.1. Straight Line Test
5.2. Curved Test
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- National Data Traffic Accident Statistics. China National Bureau of Statistics. 2021. Available online: https://data.stats.gov.cn/easyquery.htm?cn=C01&zb=A0S0D01&sj=2021 (accessed on 5 June 2020).
- World Health Organization. Global Status Report on Road Safety 2015; World Health Organization: Geneva, Switzerland, 2015. [Google Scholar]
- Xianjian, J.; Jiadong, W.; Zeyuan, Y.; Liwei, X.; Guodong, Y.; Nan, C. Robust Vibration Control for Active Suspension System of In-Wheel-Motor-Driven Electric Vehicle Via mu-Synthesis Methodology. ASME Trans. J. Dyn. Syst. Meas. 2022, 144, 051007. [Google Scholar]
- Wang, F.; Lu, Y.; Li, H. Heavy-duty vehicle braking stability control and hil verification for improving traffic safety. J. Adv. Transp. 2022, 2022, 5680599. [Google Scholar] [CrossRef]
- Lu, Y.; Wang, T.; Zhang, H. Multiobjective Synchronous Control of Heavy-Duty Vehicles Based on Longitudinal and Lateral Coupling Dynamics. Shock. Vib. 2022, 2022, 6987474. [Google Scholar] [CrossRef]
- Khaleghian, S.; Emami, A.; Taheri, S. A technical survey on tire-road friction estimation. Friction 2017, 5, 123–146. [Google Scholar] [CrossRef] [Green Version]
- Alonso, J.; López, J.M.; Pavón, I.; Recuero, M.; Asensio, C.; Arcas, G.; Bravo, A. On-board wet road surface identification using tyre/road noise and support vector machines. Appl. Acoust. 2014, 76, 407–415. [Google Scholar] [CrossRef]
- Xiong, Y.; Yang, X. A review on in-tire sensor systems for tire-road interaction studies. Sens. Rev. 2018, 38, 231–238. [Google Scholar] [CrossRef]
- Gao, L.; Xiong, L.; Lin, X.; Xia, X.; Liu, W.; Lu, Y.; Yu, Z. Multi-sensor fusion road friction coefficient estimation during steering with Lyapunov method. Sensors 2019, 19, 3816. [Google Scholar] [CrossRef] [Green Version]
- Leng, B.; Jin, D.; Xiong, L.; Yang, X. Estimation of tire-road peak friction coefficient for intelligent electric vehicles based on camera and tire dynamics information fusion. Mech. Syst. Signal Process. 2021, 150, 107275. [Google Scholar] [CrossRef]
- Wang, Y.; Liang, G.; Wei, Y. Road Identification Algorithm of Intelligent Tire Based on Support Vector Machine. J. Automot. Eng. 2020, 42, 1671–1678+1717. [Google Scholar]
- Erdogan, G.; Alexander, L.; Rajamani, R. Estimation of tire road friction coefficient using a novel wireless piezoelectric tire sensor. IEEE Sens. J. 2011, 11, 267–279. [Google Scholar] [CrossRef]
- Khaleghian, S. The Application of Intelligent Tires and Model-Based Estimation Algorithms in Tire-Road Contact Characterization; Virginia Polytechnic Institute and State University: Blacksburg, VA, USA, 2017. [Google Scholar]
- Niskanen, A.J.; Tuononen, A.J. Three 3-axis accelerometers fixed inside the tire for studying contact patch deformations in wet conditions. Veh. Syst. Dyn. 2014, 52 (Supp. S1), 287–298. [Google Scholar] [CrossRef]
- Niskanen, A.J.; Tuononen, A.J. Accelerometer tire to estimate the aquaplaning state of the tire-road contact. Intell. Veh. Symp. (IV) 2015, 2015, 343–348. [Google Scholar]
- Alexander, L.; Rajamani, R. Tire road friction coefficient estimation. J. Dyn. Syst. Meas. Control 2004, 126, 265–275. [Google Scholar]
- Chen, G.; Wang, X.; Su, L.; Wang, Y. Safety distance model for longitudinal collision avoidance of logistics vehicles considering slope and road adhesion coefficient. Proc. Inst. Mech. Eng. J. Automob. Eng. 2020, 235, 498–512. [Google Scholar]
- Li, G.; Zong, C.F.; Zhang, Q.; Hong, W. Acceleration slip regulation control of 4 WID electric vehicles based on fuzzy road identification. J. South China Univ. Technol. 2012, 40, 99–104. [Google Scholar]
- Zhang, X.; Gohlich, D. A hierarchical estimator development for estimation of tire-road friction coefficient. PLoS ONE 2017, 12, e0171085. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Li, J.; Zhang, K. Study on vehicle adaptive cruise control based on road surface adhesion coefficient estimation. J. Nanjing Univ. Sci. Technol. 2018, 42, 466–473. [Google Scholar]
- Xin, X.; Lu, X.; Kai, S.; Yu, Z.P. Estimation of maximum road friction coefficient based on Lyapunov method. Int. J. Automot. Technol. 2016, 17, 991–1002. [Google Scholar]
- Lin, F.; Huang, C. Using UKF algorithm to estimate road surface adhesion coefficient. J. Harbin Inst. Technol. 2013, 45, 115–120. [Google Scholar]
- Siramdasu, Y.; Li, K.; Wheeler, R. Virtual Generation of Flexible Ring Tire Models Using Finite Element Analysis: Application to Dynamic Cleat Simulations. Tire Sci. Technol. 2022, 50, 288–315. [Google Scholar] [CrossRef]
- Polasik, J.; Waluś, K.J.; Warguła, Ł. Experimental studies of the size contact area of a summer tire as a function of pressure and the load. Procedia Eng. 2017, 177, 347–351. [Google Scholar] [CrossRef]
- He, H.; Li, R.; Yang, Q.; Pei, J.; Guo, F. Analysis of the tire-pavement contact stress characteristics during vehicle maneuvering. KSCE J. Civ. Eng. 2021, 25, 2451–2463. [Google Scholar] [CrossRef]
- Xiong, Y.; Tuononen, A. Rolling deformation of truck tires: Measurement and analysis using a tire sensing approach. J. Terramechanics 2015, 61, 33–42. [Google Scholar] [CrossRef]
- Wach, W.; Zębala, J. Striated Tire Yaw Marks—Modeling and Validation. Energies 2021, 14, 4309. [Google Scholar] [CrossRef]
- Dudziak, M.; Lewandowski, A.; Waluś, K.J. Static tests the stiffness of car tires. IOP Conf. Ser. Mater. Sci. Eng. 2020, 776, 012071. [Google Scholar] [CrossRef]
- KuliKowsKi, K.; Szpica, D. Determination of directional stiffnesses of vehicles’ tires under a static load operation. Eksploat. I Niezawodn. 2014, 16, 66–72. [Google Scholar]
- Liang, G.; Wang, Y.; Garcia, M.A.; Zhao, T.; Liu, Z.; Kaliske, M.; Wei, Y. A Universal Approach to Tire Forces Estimation by Accelerometer-Based Intelligent Tire: Analytical Model and Experimental Validation. Tire Sci. Technol. 2022, 50, 2–26. [Google Scholar] [CrossRef]
- Dong, X.; Tao, S.; Zhang, H. Robust Lateral and Longitudinal Tire Force Estimation Based on PMI Observer for Intelligent Vehicle. In Proceedings of the 2022 IEEE 5th International Conference on Industrial Cyber-Physical Systems (ICPS), Coventry, UK, 24–26 May 2022; pp. 1–6. [Google Scholar]
- Zhu, J.J.; Khajepour, A.; Spike, J.; Chen, S.K.; Moshchuk, N. An integrated vehicle velocity and tyre-road friction estimation based on a half-car model. Int. J. Veh. Auton. Syst. 2016, 13, 114–139. [Google Scholar] [CrossRef]
- Liu, X.; Cao, Q.; Wang, H.; Chen, J.; Huang, X. Evaluation of vehicle braking performance on wet pavement surface using an integrated tire-vehicle modeling approach. Transp. Res. Rec. 2019, 2673, 295–307. [Google Scholar] [CrossRef]
- Saha, A.; Wahi, P.; Wiercigroch, M.; Stefański, A. A modified LuGre friction model for an accurate prediction of friction force in the pure sliding regime. Int. J. Non-Linear Mech. 2016, 2019, 122–131. [Google Scholar] [CrossRef]
- Gim, G.; Nikravesh, P.E. An analytical model of pneumatic tires for vehicle dynamic simulations. Part 1: PureSlips. Int. J. Veh. Des. 1990, 11, 589–618. [Google Scholar]
- Gim, G.; Nikravesh, P.E. A three-dimensional tire model for steady-state simulations of vehicles. SAE Trans. 1993, 102, 150–159. [Google Scholar]
- Dugoff, H.; Fancher, P.S.; Sege, L. An analysis of tire traction properties and their influence on vehicle dynamic performance. SAE Trans. 1970, 1219–1243. [Google Scholar]
- Hahn, J.; Rajamani, R.; Alexander, L. GPS-based real-time identification of tire-road friction coefficient. Ransactions Control. Syst. Technol. 2002, 10, 331–343. [Google Scholar] [CrossRef]
- De Wit, C.; Olsson, H.; Astroem, K.J.; Lischinsky, P. A new model for control of systems with friction. Trans. Autom. Control. 1995, 40, 419–425. [Google Scholar] [CrossRef] [Green Version]
- Burckhardt, M. Wheel Slip Control Systems; Vogel Verlag: Würzburg, Germany, 1993. [Google Scholar]
- Zhang, X.; Wang, F.; Wang, Z.; Li, W.; He, D. Intelligent tires based on wireless passive surface acoustic wave sensors. In Proceedings of the 7th International IEEE Conference on Intelligent Transportation Systems (IEEE Cat. No. 04TH8749), Washington, WA, USA, 3–6 October 2004; Volume 2004, pp. 960–964. [Google Scholar]
- Kuiper, E.; Van Oosten, J.M. The PAC2002 advanced handling tire model. Veh. Syst. Dyn. 2007, 45, 153–167. [Google Scholar] [CrossRef]
- Bakker, E.; Nyborg, L.; Pacejka, H.B. Tire modeling for use in vehicle dynamics studies. SAE Int. Congr. Expo. 1987, 190–204. [Google Scholar]
- Song, Y.; Shu, H.; Chen, X.; Luo, S. Direct-yaw-moment control of four-wheel-drive electrical vehicle based on lateral tire–road forces and tire slip angle observer. IET Intell. Transp. Syst. 2019, 13, 303–312. [Google Scholar] [CrossRef]
- Guo, K. UniTire: Unified Tire Model. J. Mech. Eng. 2016, 52, 90–99. [Google Scholar] [CrossRef]
- Rajamani, R. Vehicle Dynamics and Control, 2nd ed.; Springer Science: London, UK, 2012. [Google Scholar]
- Han, Y.; Lu, Y.; Liu, J.; Zhang, J. Research on Tire/Road Peak Friction Coefficient Estimation Considering Effective Contact Characteristics between Tire and Three-Dimensional Road Surface. Machines 2022, 10, 614. [Google Scholar] [CrossRef]
- Lu, Y.; Zhang, J.; Li, H.; Ma, Z. Research on tire-road system coupling dynamics based on non-uniform contact. J. Mech. Eng. 2021, 57, 87–98. [Google Scholar]
- Lu, Y.; Zhang, J.; Yang, S.; Yang, S.; Li, Z. Study on improvement of LuGre dynamical model and its application in vehicle handling dynamics. J. Mech. Sci. Technol. 2019, 33, 545–558. [Google Scholar] [CrossRef]
- Lu, Y.; Zhang, J.; Yang, S.; Li, Z. Construction of Three-Dimensional Road Surface and Application on Interaction between Vehicle and Road. Shock. Vib. 2018, 2018, 1–14. [Google Scholar]
- Han, Y.; Lu, Y.; Chen, N.; Wang, H. Research on the Identification of Tire Road Peak Friction Coefficient under Full Slip Rate Range Based on Normalized Tire Model. Actuators 2022, 11, 59. [Google Scholar] [CrossRef]
- Tahami, F.; Farhangi, S.; Kazemi, R. A fuzzy logic direct yaw-moment control system for all-wheel-drive electric vehicles. Veh. Syst. Dyn. 2004, 41, 203–221. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Name of Parameter |
|---|---|---|
| 880 kg | Total vehicle mass | |
| 788 kg | Sprung mass | |
| L | 2.040 m | Wheel base |
| a | 1.145 m | Distance from front axle to centroid |
| b | 0.895 m | Distance from rear axle to centroid |
| 0.54 m | Centroid height | |
| T | 1.3 m | Width of wheel track |
| 832.3 kg·m2 | Moment of inertia about the z-axis | |
| Kψ | 25,041 N/rad | Tire cornering stiffness |
| 19.6 Kn/m | Stiffness coefficient of suspension system | |
| 1450 N·s/m2 | Damping constant of suspension buffer | |
| 250 Kn/m | Stiffness coefficient of tire | |
| 3375 N·s/m2 | Damping coefficient of tire |
| Lateral Slip | Longitudinal Slip | |||
|---|---|---|---|---|
| VS | S | M | VB | |
| VS | VS | S | M | VB |
| S | M | M | B | VB |
| M | B | B | B | VB |
| VB | VB | VB | VB | VVB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Lu, Y.; Chen, N.; Han, Y. Integrated Adhesion Coefficient Estimation of 3D Road Surfaces Based on Dimensionless Data-Driven Tire Model. Machines 2023, 11, 189. https://doi.org/10.3390/machines11020189
Xu Z, Lu Y, Chen N, Han Y. Integrated Adhesion Coefficient Estimation of 3D Road Surfaces Based on Dimensionless Data-Driven Tire Model. Machines. 2023; 11(2):189. https://doi.org/10.3390/machines11020189
Chicago/Turabian StyleXu, Zhiwei, Yongjie Lu, Na Chen, and Yinfeng Han. 2023. "Integrated Adhesion Coefficient Estimation of 3D Road Surfaces Based on Dimensionless Data-Driven Tire Model" Machines 11, no. 2: 189. https://doi.org/10.3390/machines11020189