
Study on the Coupling Relationship between Wear and Dynamics in Planetary Gear Systems
Abstract
:1. Introduction
2. Modeling of Coupled Dynamics and Wear
2.1. Dynamic Model Considering Friction
2.2. TVMS Taking into Account Wear
2.3. Improved Archard Wear Model
3. Results and Discussion
3.1. Experiments on Friction and Wear Coefficients
3.2. The Effect of Calculation Methods and Friction on Wear
3.3. Effect of Wear on the Dynamic Response
3.4. Influence of Wear on the Uniform Load Performance of Planet Gears
4. Conclusions
- (1)
- Compared to the prediction method that considers only sun gear wear and that considers all gear wear, the difference in the prediction results for sun gear wear is slight when the level of wear is minor. However, the error in the transmission error of the p-r meshing pair can reach 8.1%. This difference is magnified by the further evolution of wear. The friction-considered prediction method gives smoother predictions of sun gear wear compared to the frictionless one. However, the dynamic response increases significantly due to friction. The errors in vibration velocity and transmission error can be as high as 75.5% and 72.0%, respectively.
- (2)
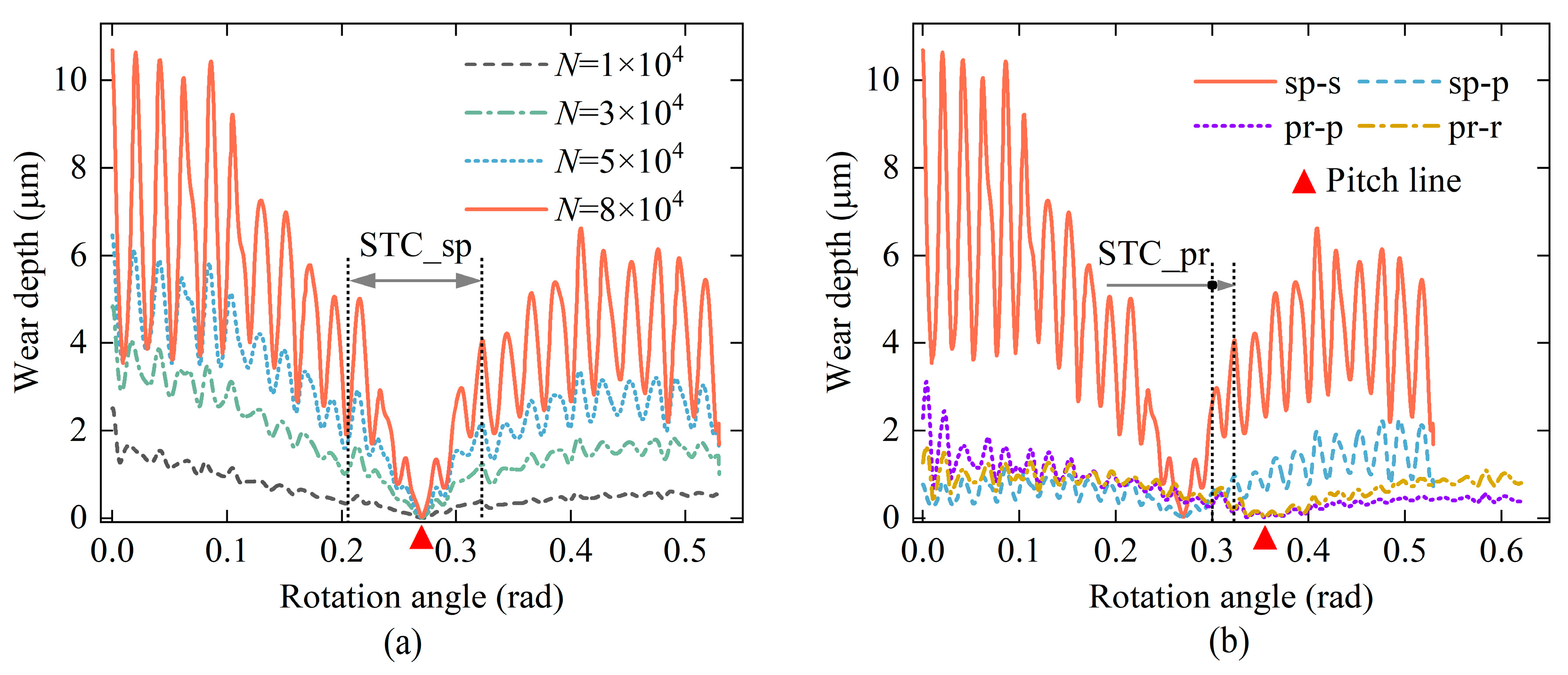
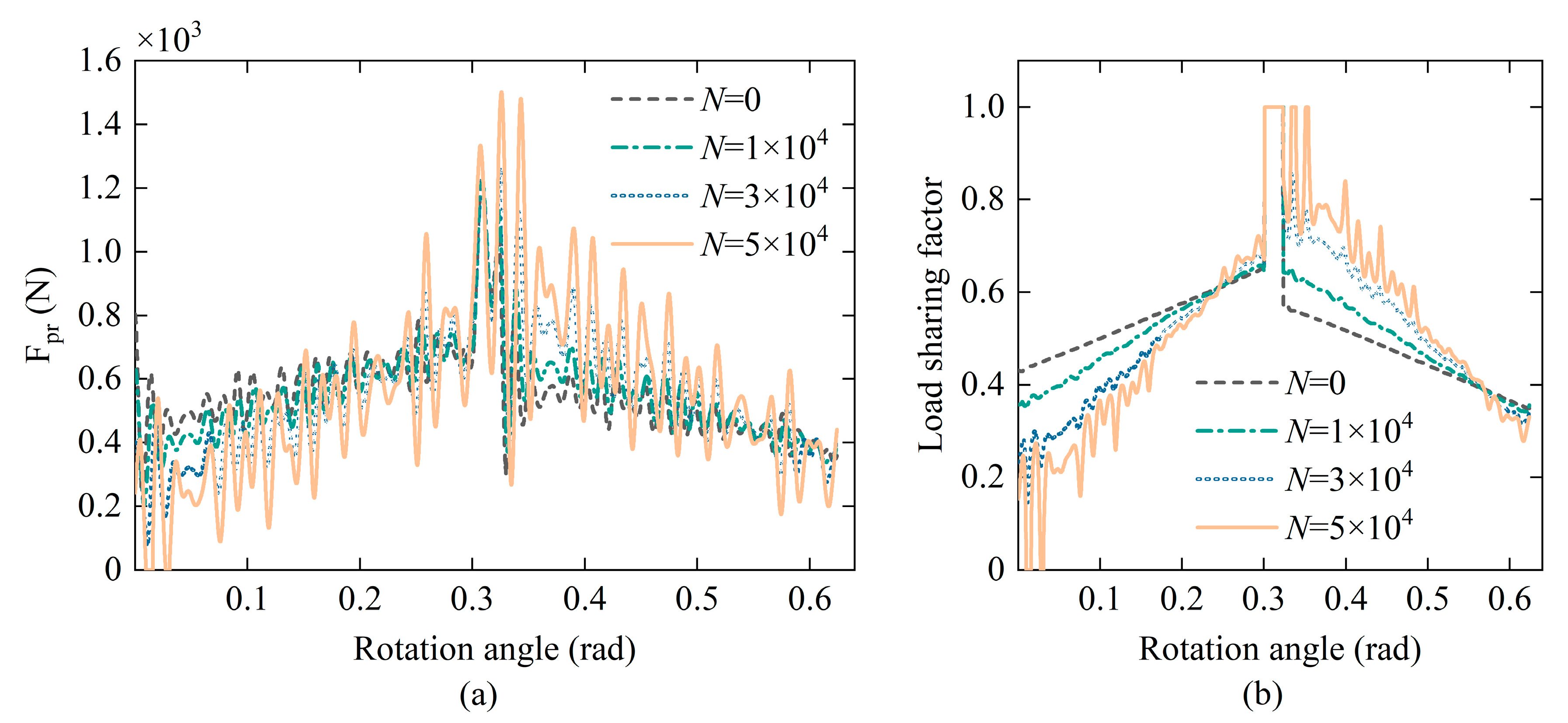
- Wear causes different deformations of the two meshing gear teeth in the double tooth contact region, which results in a significant decrease in stiffness. And, the degree of fluctuation of TVMS and meshing force increases significantly with the evolution of wear. The load-sharing factor in the dedendum and addendum regions decreases as the tooth surface wears. The location of maximum wear depth is, thus, correspondingly moved slowly towards the pitch line.
- (3)
- Early wear is able to improve the dynamic performance of the system. Fluctuations in the gear ratio, vibration velocity, and transmission error are all mitigated. However, as wear increases, the dynamic performance of the system gradually deteriorates. This is mainly reflected in the significant increase in the higher harmonics of the meshing frequency.
- (4)
- The uniform load performance of planet gears in the system showed the same trend of change during wear as indicators such as transmission errors. A minor amount of wear did not change the equilibrium position of the system. However, the uniform load performance of planet gears decreases significantly as the wear increases. The standard deviation at N = 5 × 104 reaches more than three times that without wear, and the amplitude increases by more than 80%.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cao, W.; Han, Z.; Yang, Z.Z.; Wang, N.; Qu, J.X.; Wang, D. Deterioration State Diagnosis and Wear Evolution Evaluation of Planetary Gearbox Using Vibration and Wear Debris Analysis. Measurement 2022, 193, 110978. [Google Scholar] [CrossRef]
- Feng, K.; Ji, J.C.; Ni, Q.; Beer, M. A Review of Vibration-Based Gear Wear Monitoring and Prediction Techniques. Mech. Syst. Signal Process. 2023, 182, 109605. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; Zuo, M.J.; He, Z. Condition Monitoring and Fault Diagnosis of Planetary Gearboxes: A Review. Measurement 2014, 48, 292–305. [Google Scholar] [CrossRef]
- Cooley, C.G.; Parker, R.G. A Review of Planetary and Epicyclic Gear Dynamics and Vibrations Research. Appl. Mech. Rev. 2014, 66, 040804. [Google Scholar] [CrossRef]
- Wang, X. A Study on Coupling Faults’ Characteristics of Fixed-Axis Gear Crack and Planetary Gear Wear. Shock. Vib. 2018, 2018, 4692796. [Google Scholar] [CrossRef]
- Dong, N.; Cui, Q.; Zhou, J.; Tong, R.; Wang, H.; Lu, F. Study on Wear Evolution of Spur Gears Considering Dynamic Meshing Stiffness. J. Mech. Sci. Technol. 2023, 37, 3393–3408. [Google Scholar] [CrossRef]
- Kuang, J.H.; Lin, A.D. The Effect of Tooth Wear on the Vibration Spectrum of a Spur Gear Pair. J. Vib. Acoust. 1999, 123, 311–317. [Google Scholar] [CrossRef]
- Sun, Y.; Li, Y.; Zhang, Q.; Qin, X.; Chen, K. Wear Analysis and Simulation of Small Module Gear Based on Archard Model. Eng. Fail. Anal. 2023, 144, 106990. [Google Scholar] [CrossRef]
- Matkovič, S.; Pogačnik, A.; Kalin, M. Wear-Coefficient Analyses for Polymer-Gear Life-Time Predictions: A Critical Appraisal of Methodologies. Wear 2021, 480–481, 203944. [Google Scholar] [CrossRef]
- Sánchez, M.B.; Pleguezuelos, M.; Pedrero, J.I. Influence of Profile Modification on the Transmission Error of Spur Gears under Surface Wear. Mech. Mach. Theory 2024, 191, 105473. [Google Scholar] [CrossRef]
- Chen, W.; Lei, Y.; Fu, Y.; Hou, L. A Study of Effects of Tooth Surface Wear on Time-Varying Mesh Stiffness of External Spur Gear Considering Wear Evolution Process. Mech. Mach. Theory 2021, 155, 104055. [Google Scholar] [CrossRef]
- Shen, Z.; Qiao, B.; Yang, L.; Luo, W.; Chen, X. Evaluating the Influence of Tooth Surface Wear on TVMS of Planetary Gear Set. Mech. Mach. Theory 2019, 136, 206–223. [Google Scholar] [CrossRef]
- Shen, Z.; Qiao, B.; Yang, L.; Luo, W.; Yang, Z.; Chen, X. Fault Mechanism and Dynamic Modeling of Planetary Gear with Gear Wear. Mech. Mach. Theory 2021, 155, 104098. [Google Scholar] [CrossRef]
- Yuksel, C.; Kahraman, A. Dynamic Tooth Loads of Planetary Gear Sets Having Tooth Profile Wear. Mech. Mach. Theory 2004, 39, 695–715. [Google Scholar] [CrossRef]
- Wojnarowski, J.; Onishchenko, V. Tooth Wear Effects on Spur Gear Dynamics. Mech. Mach. Theory 2003, 38, 161–178. [Google Scholar] [CrossRef]
- Kahraman, A.; Ding, H. A Methodology to Predict Surface Wear of Planetary Gears Under Dynamic Conditions. Mech. Based Des. Struct. Mach. 2010, 38, 493–515. [Google Scholar] [CrossRef]
- Inalpolat, M.; Kahraman, A. A Theoretical and Experimental Investigation of Modulation Sidebands of Planetary Gear Sets. J. Sound Vib. 2009, 323, 677–696. [Google Scholar] [CrossRef]
- Zhao, X.; Fan, W.; Wang, Z.; Wen, Z.; Wang, P. An Explicit Finite Element Approach for Simulations of Transient Meshing Contact of Gear Pairs and the Resulting Wear. Wear 2023, 523, 204802. [Google Scholar] [CrossRef]
- Sondkar, P.; Kahraman, A. A Dynamic Model of a Double-Helical Planetary Gear Set. Mech. Mach. Theory 2013, 70, 157–174. [Google Scholar] [CrossRef]
- Matejic, M.S.; Blagojevic, M.Z.; Matejic, M.M. Dynamic Behaviour of a Planetary Reducer with Double Planet Gears. Mech. Sci. 2021, 12, 997–1003. [Google Scholar] [CrossRef]
- Ouyang, T.; Huang, H.; Zhang, N.; Mo, C.; Chen, N. A Model to Predict Tribo-Dynamic Performance of a Spur Gear Pair. Tribol. Int. 2017, 116, 449–459. [Google Scholar] [CrossRef]
- Walker, J.; Mohammadpour, M.; Theodossiades, S.; Bewsher, S.R.; Offner, G.; Bansal, H.; Leighton, M.; Braunstingl, M.; Flesch, H.-G. A Multi-Physics Transient Wear Model for Helical Gear Pairs. Tribol. Int. 2022, 169, 107463. [Google Scholar] [CrossRef]
- Wang, H.; Zhou, C.; Hu, B.; Li, Y. An Adhesive Wear Model of Rough Gear Surface Considering Modified Load Distribution Factor. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2022, 236, 2162–2179. [Google Scholar] [CrossRef]
- Liu, H.; Liu, H.; Zhu, C.; Wei, P.; Tang, J. Tribological Behavior of Coated Spur Gear Pairs with Tooth Surface Roughness. Friction 2018, 7, 117–128. [Google Scholar] [CrossRef]
- Mao, Y.; Tong, J.; Chin, Z.Y.; Borghesani, P.; Peng, Z. Transmission-Error- and Vibration-Based Condition Monitoring of Gear Wear with Contaminated Lubricant. Wear 2023, 523, 204760. [Google Scholar] [CrossRef]
- Masjedi, M.; Khonsari, M.M. An Engineering Approach for Rapid Evaluation of Traction Coefficient and Wear in Mixed EHL. Tribol. Int. 2015, 92, 184–190. [Google Scholar] [CrossRef]
- Li, X.; Xu, J.; Yang, Z.; Chen, R.; Yang, H. The Influence of Tooth Surface Wear on Dynamic Characteristics of Gear-Bearing System Based on Fractal Theory. J. Comput. Nonlinear Dyn. 2020, 15, 041004. [Google Scholar] [CrossRef]
- Wang, T.; Han, Q.; Chu, F.; Feng, Z. Vibration Based Condition Monitoring and Fault Diagnosis of Wind Turbine Planetary Gearbox: A Review. Mech. Syst. Signal Process. 2019, 126, 662–685. [Google Scholar] [CrossRef]
- Xu, L.; Ding, K.; He, G.; Li, Y.; Chen, Z. Resonance Modulation Vibration Mechanism of Equally-Spaced Planetary Gearbox with a Localized Fault on Sun Gear. Mech. Syst. Signal Process. 2022, 166, 108450. [Google Scholar] [CrossRef]
- Zhang, M.; Zuo, M.J.; Wei, D.; Liu, J.; Wang, K.; Wang, Y. Motion Periods of Sun Gear Dynamic Fault Meshing Positions in Planetary Gear Systems. Measurement 2020, 162, 107897. [Google Scholar] [CrossRef]
- Liu, X. Vibration Modelling and Fault Evolution Symptom Analysis of a Planetary Gear Train for Sun Gear Wear Status Assessment. Mech. Syst. Signal Process. 2022, 166, 108403. [Google Scholar] [CrossRef]
- Dai, H.; Chen, F.; Xun, C.; Long, X. Numerical Calculation and Experimental Measurement for Gear Mesh Force of Planetary Gear Transmissions. Mech. Syst. Signal Process. 2022, 162, 108085. [Google Scholar] [CrossRef]
- Luo, W.; Qiao, B.; Shen, Z.; Yang, Z.; Cao, H.; Chen, X. Influence of Sliding Friction on the Dynamic Characteristics of a Planetary Gear Set With the Improved Time-Varying Mesh Stiffness. J. Mech. Des. 2020, 142, 073302. [Google Scholar] [CrossRef]
- Zhang, K.; Li, H.; Cao, S.; Wang, C.; Sun, B.; Liu, A. Investigation on Planetary Gearbox Fault Mechanism under Variable Speed Conditions Based on Rigid-Flexible Coupling Dynamics Model. Eng. Fail. Anal. 2022, 133, 105994. [Google Scholar] [CrossRef]
- Tian, H.; Han, H.; Zhao, Z.; Han, C.; Ma, H. Wear Prediction and Meshing Characteristics for the Planetary Gear Set Considering Angular Misalignment and Rotating Carrier. Eng. Fail. Anal. 2022, 140, 106583. [Google Scholar] [CrossRef]
- Feng, K.; Smith, W.A.; Peng, Z. Use of an Improved Vibration-Based Updating Methodology for Gear Wear Prediction. Eng. Fail. Anal. 2021, 120, 105066. [Google Scholar] [CrossRef]
- Feng, K.; Borghesani, P.; Smith, W.A.; Randall, R.B.; Chin, Z.Y.; Ren, J.; Peng, Z. Vibration-Based Updating of Wear Prediction for Spur Gears. Wear 2019, 426–427, 1410–1415. [Google Scholar] [CrossRef]
- Feng, K.; Smith, W.A.; Randall, R.B.; Wu, H.; Peng, Z. Vibration-Based Monitoring and Prediction of Surface Profile Change and Pitting Density in a Spur Gear Wear Process. Mech. Syst. Signal Process. 2022, 165, 108319. [Google Scholar] [CrossRef]
- Sainsot, P.; Velex, P.; Duverger, O. Contribution of Gear Body to Tooth Deflections—A New Bidimensional Analytical Formula. J. Mech. Des. 2004, 126, 748–752. [Google Scholar] [CrossRef]
- Pedrero, J.I.; Pleguezuelos, M.; Sánchez, M.B. Influence of Meshing Stiffness on Load Distribution between Planets of Planetary Gear Drives. Mech. Mach. Theory 2022, 170, 104718. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Sun Gear | Planet Gear | Ring Gear |
|---|---|---|---|
| Module (mm) | 2 | ||
| Number of teeth | 25 | 31 | 87 |
| Pressure angle (°) | 20 | ||
| Face width (mm) | 20 | ||
| Modification coefficient | xm = 0 | ||
| Tip clearance coefficient | c* = 0.25 | ||
| Addendum coefficient | ha* = 1 | ||
| Elastic modulus (GPa) | 207 | ||
| Poisson’s ratio | 0.29 | ||
| Mass (kg) | 0.2611 | 0.4371 | 1.0416 |
| Moment of inertia (kg·m2) | 9.4 × 10−5 | 2.4 × 10−4 | 0.0048 |
| Parameters | Specimen | Ball |
|---|---|---|
| Modulus of elasticity (GPa) | 207 | 207 |
| Density (kg/m3) | 7850 | 7850 |
| Surface roughness (μm) | 0.8 | 0.8 |
| Size (mm) | 30 (L) × 7 (W) × 7 (H) | Diameter = 9 |
| 30 N | 3 Hz | |||||||
|---|---|---|---|---|---|---|---|---|
| 2 Hz | 3 Hz | 4 Hz | 5 Hz | 10 N | 30 N | 50 N | 70 N | |
| Wear coefficient (×10−15) | 2.74 | 1.67 | 1.19 | 1.83 | 1.79 | 1.67 | 1.75 | 1.49 |
| N = 0 | N = 1 × 104 | N = 3 × 104 | N = 5 × 104 | |||||
|---|---|---|---|---|---|---|---|---|
| Value | Error | Value | Error | Value | Error | Value | Error | |
| std | 0.0087 | 0 | 0.0073 | −16.1% | 0.0104 | 19.5% | 0.0206 | 136.8% |
| max | 0.0254 | 0 | 0.0245 | −3.5% | 0.0249 | −2.0% | 0.0449 | 76.8% |
| min | −0.0253 | 0 | −0.0234 | −7.5% | −0.0317 | 25.3% | −0.0454 | 79.4% |
| N = 0 | N= 1 × 104 | N = 3 × 104 | N= 5 × 104 | |||||
| Value | Error | Value | Error | Value | Error | Value | Error | |
| mean | 0.2500 | 0 | 0.2500 | 0.0% | 0.2498 | −0.1% | 0.2491 | −0.4% |
| std | 0.0168 | 0 | 0.0165 | −1.8% | 0.0328 | 95.2% | 0.0717 | 326.8% |
| max | 0.3046 | 0 | 0.3055 | 0.3% | 0.3300 | 8.3% | 0.4007 | 31.5% |
| min | 0.2009 | 0 | 0.1954 | 2.7% | 0.1694 | 15.7% | 0.0888 | 55.8% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Dong, N.; Min, J. Study on the Coupling Relationship between Wear and Dynamics in Planetary Gear Systems. Machines 2023, 11, 986. https://doi.org/10.3390/machines11110986
Chen J, Dong N, Min J. Study on the Coupling Relationship between Wear and Dynamics in Planetary Gear Systems. Machines. 2023; 11(11):986. https://doi.org/10.3390/machines11110986
Chicago/Turabian StyleChen, Jun, Ning Dong, and Jiahua Min. 2023. "Study on the Coupling Relationship between Wear and Dynamics in Planetary Gear Systems" Machines 11, no. 11: 986. https://doi.org/10.3390/machines11110986