
A Review of Path-Planning Approaches for Multiple Mobile Robots

Abstract
:1. Introduction
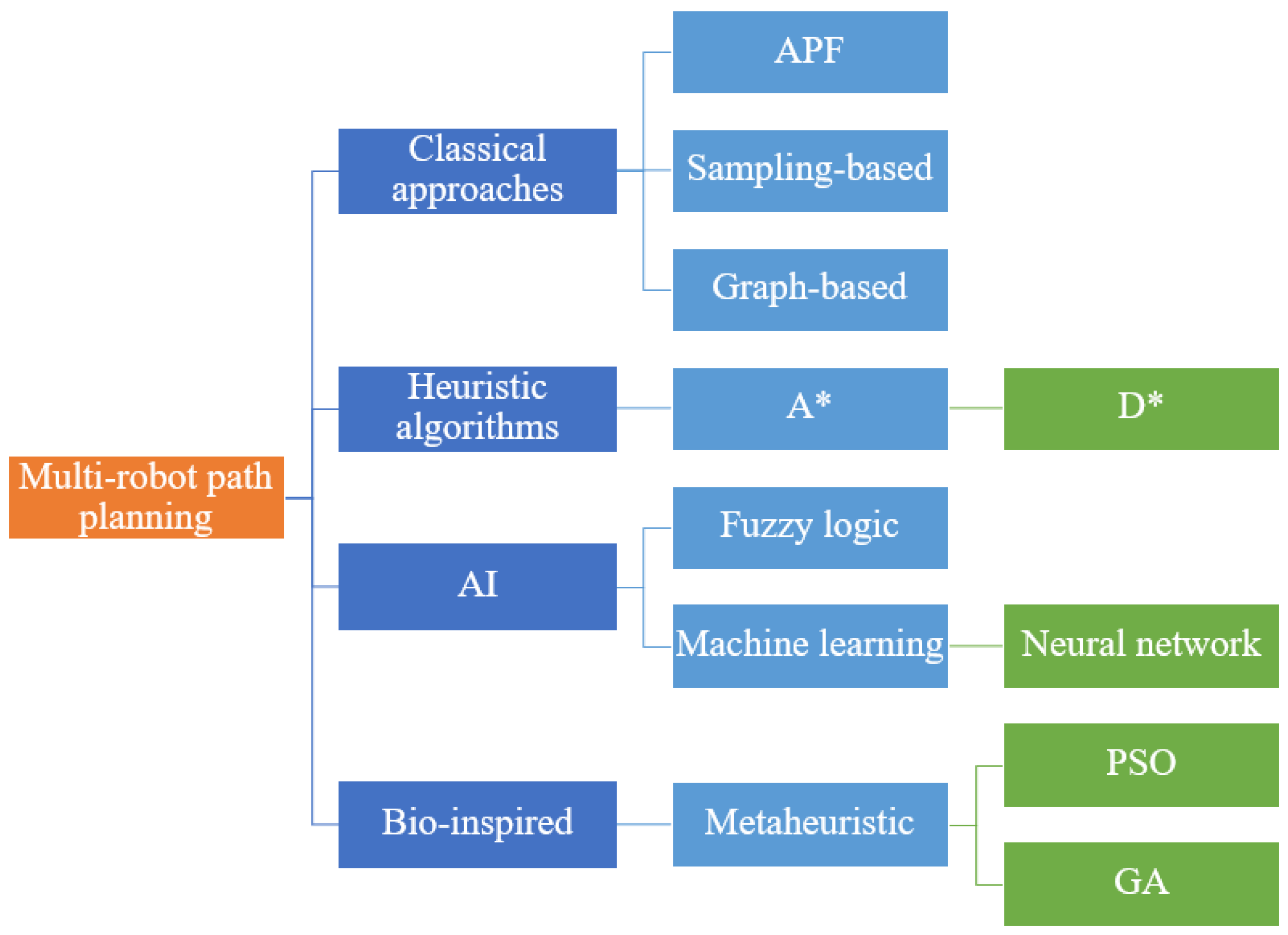
2. Multi-Robot Path Planning Approaches
2.1. Classical Approaches
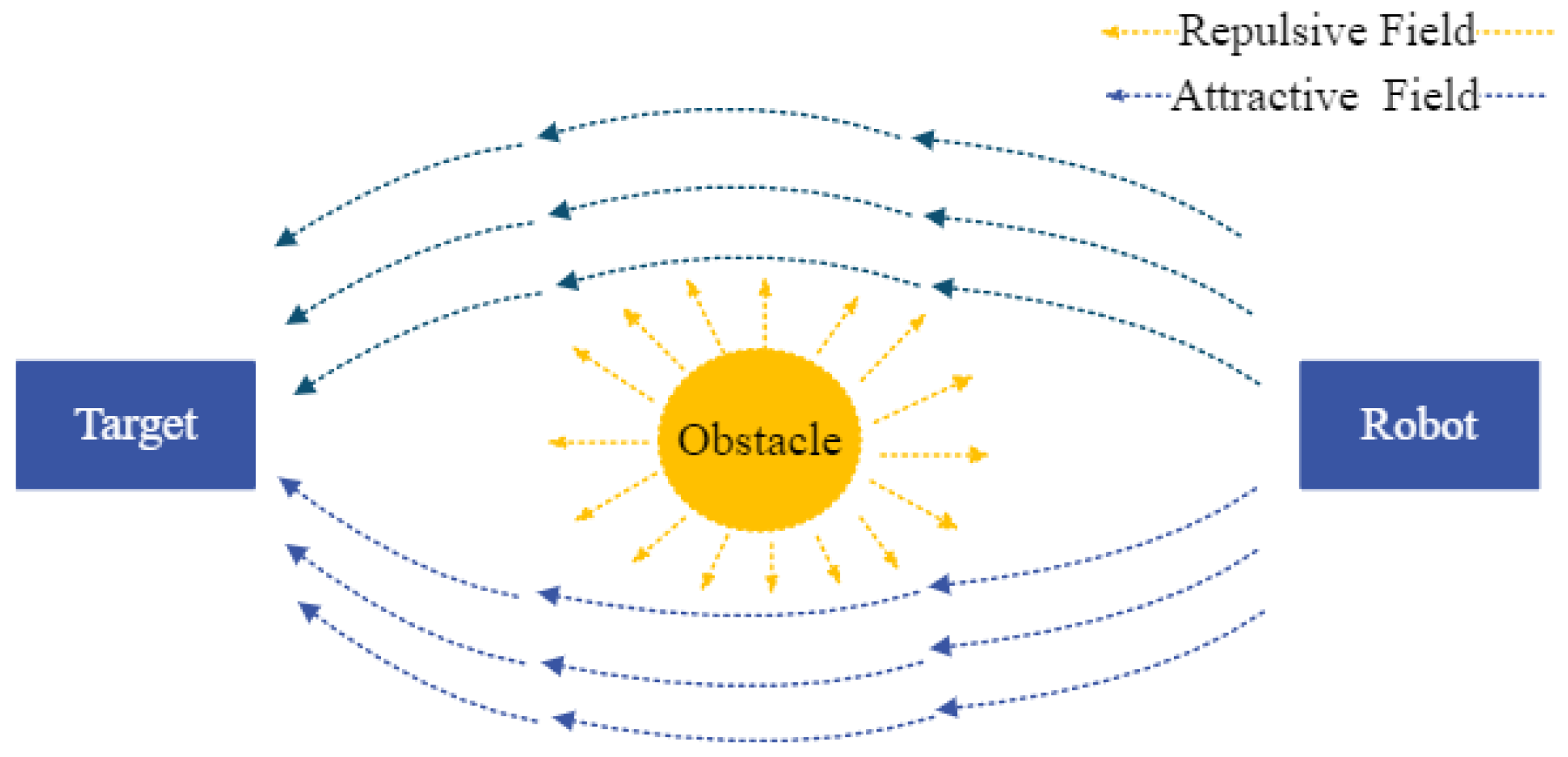
2.1.1. Artificial Potential Field (APF)
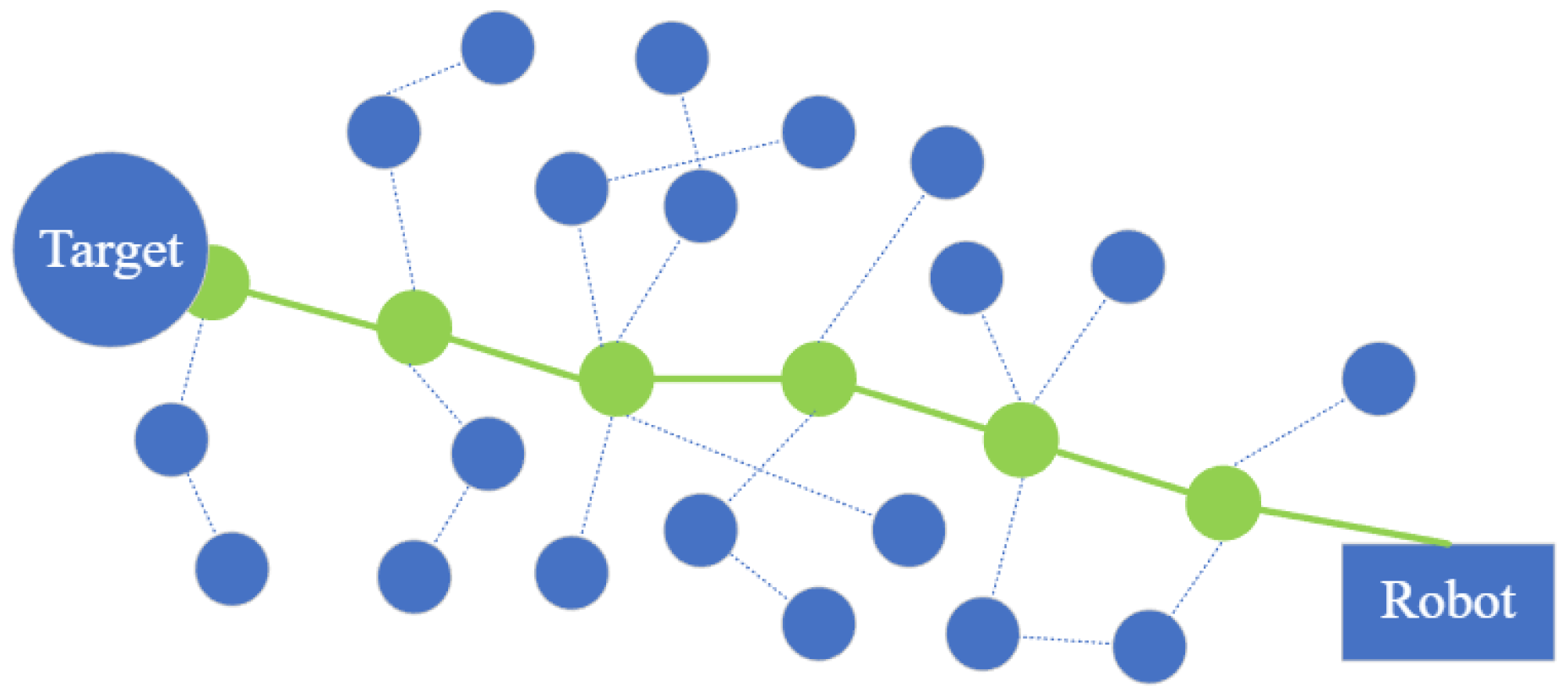
2.1.2. Sampling-Based
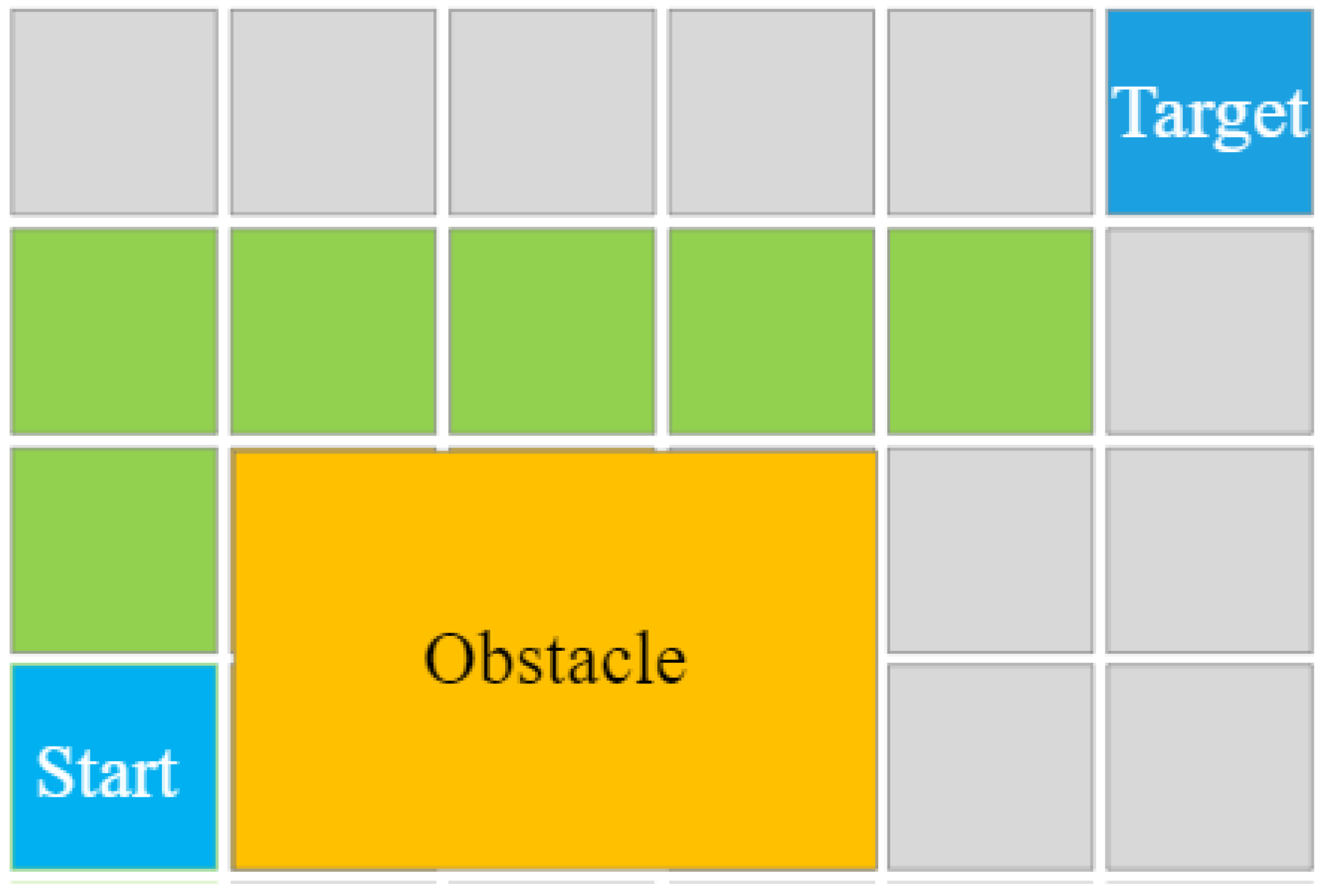
2.1.3. Other Classical Approaches
2.2. Heuristic Algorithms
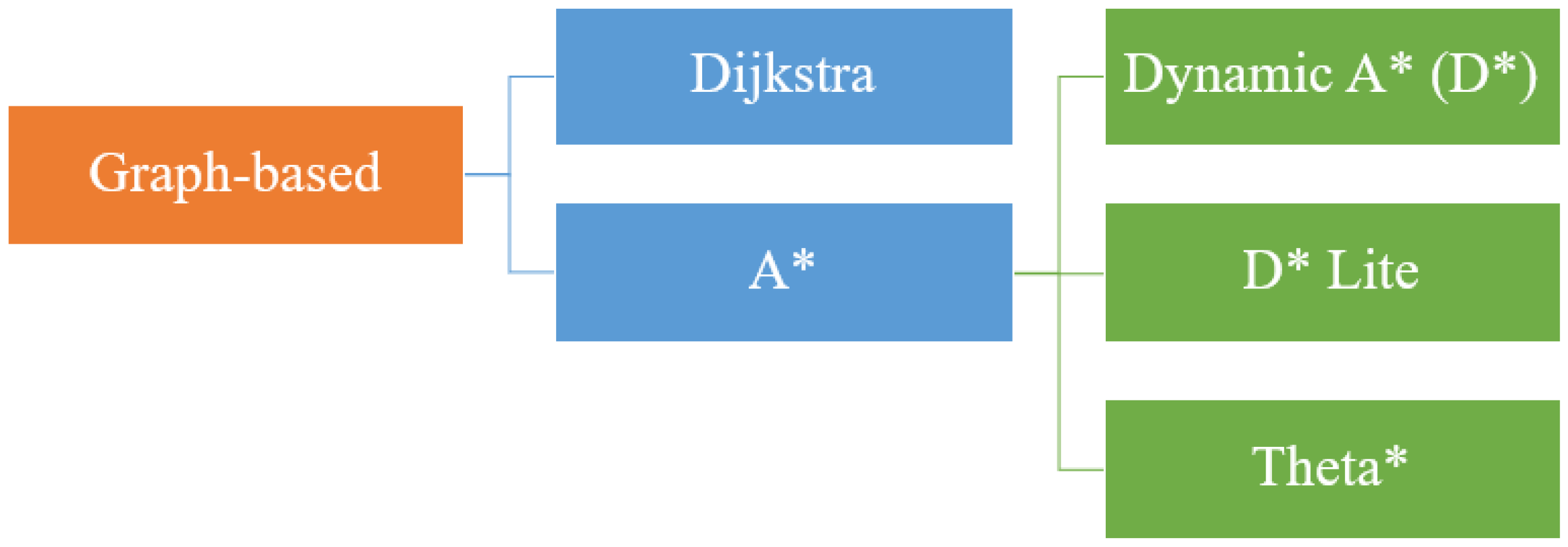
2.2.1. A* Search
2.2.2. Other Heuristic Algorithms
2.3. Bio-Inspired Techniques
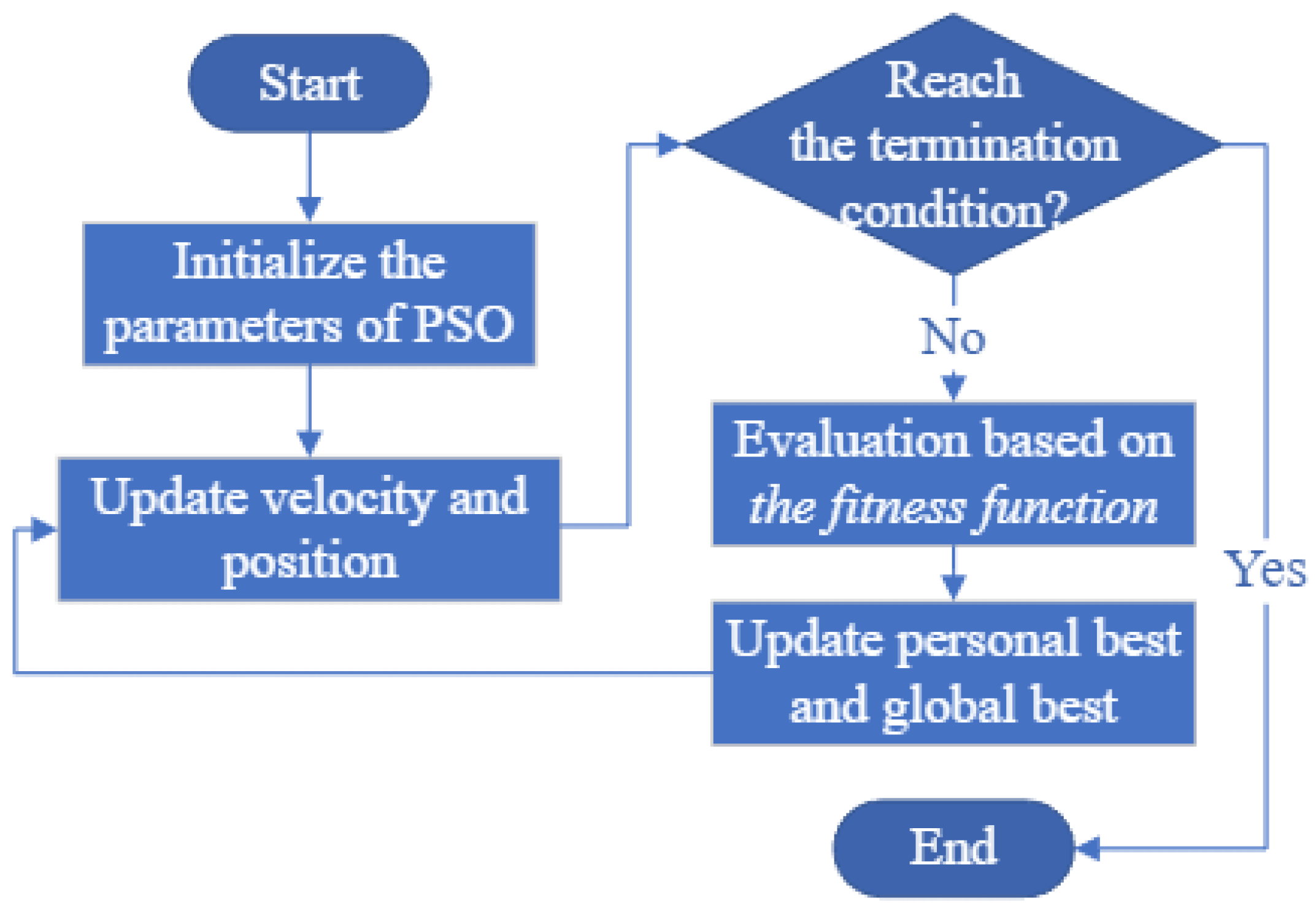
2.3.1. Particle Swarm Optimization (PSO)
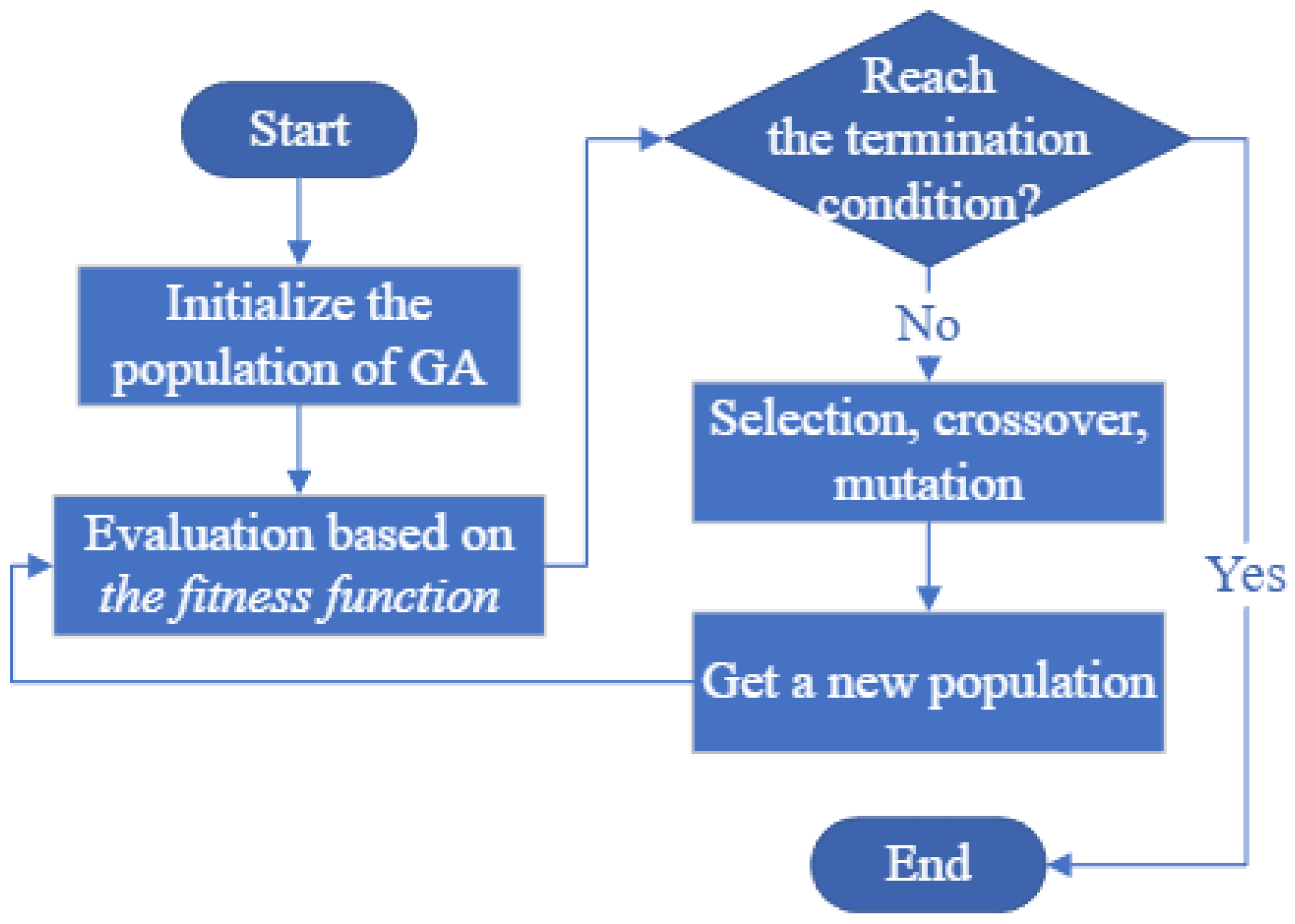
2.3.2. Genetic Algorithm (GA)
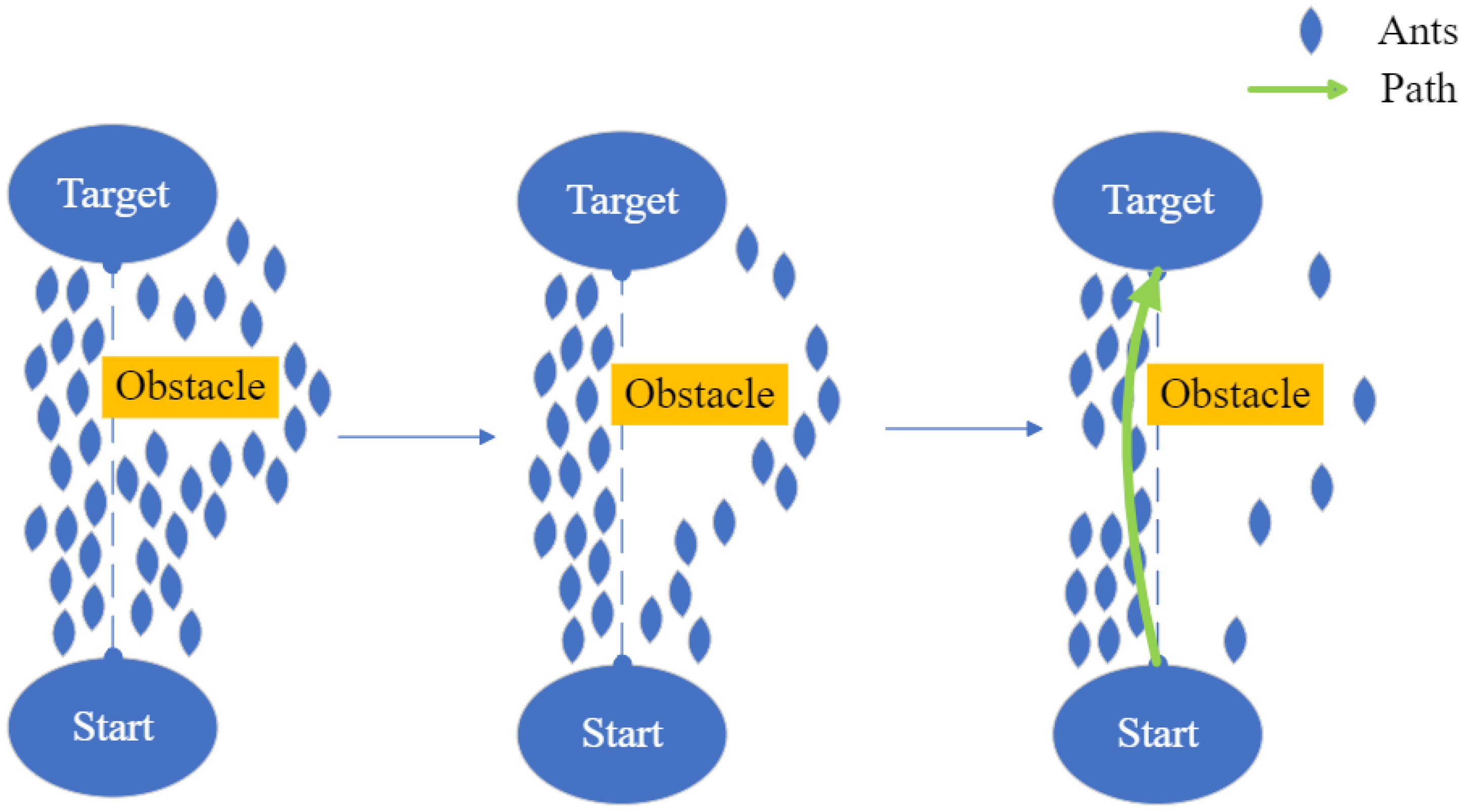
2.3.3. Ant Colony Optimization (ACO)
2.3.4. Pigeon-Inspired Optimization (PIO)
2.3.5. Grey Wolf Optimizer (GWO)
2.3.6. Other Bio-Inspired Techniques
2.4. Artificial Intelligence
2.4.1. Fuzzy Logic
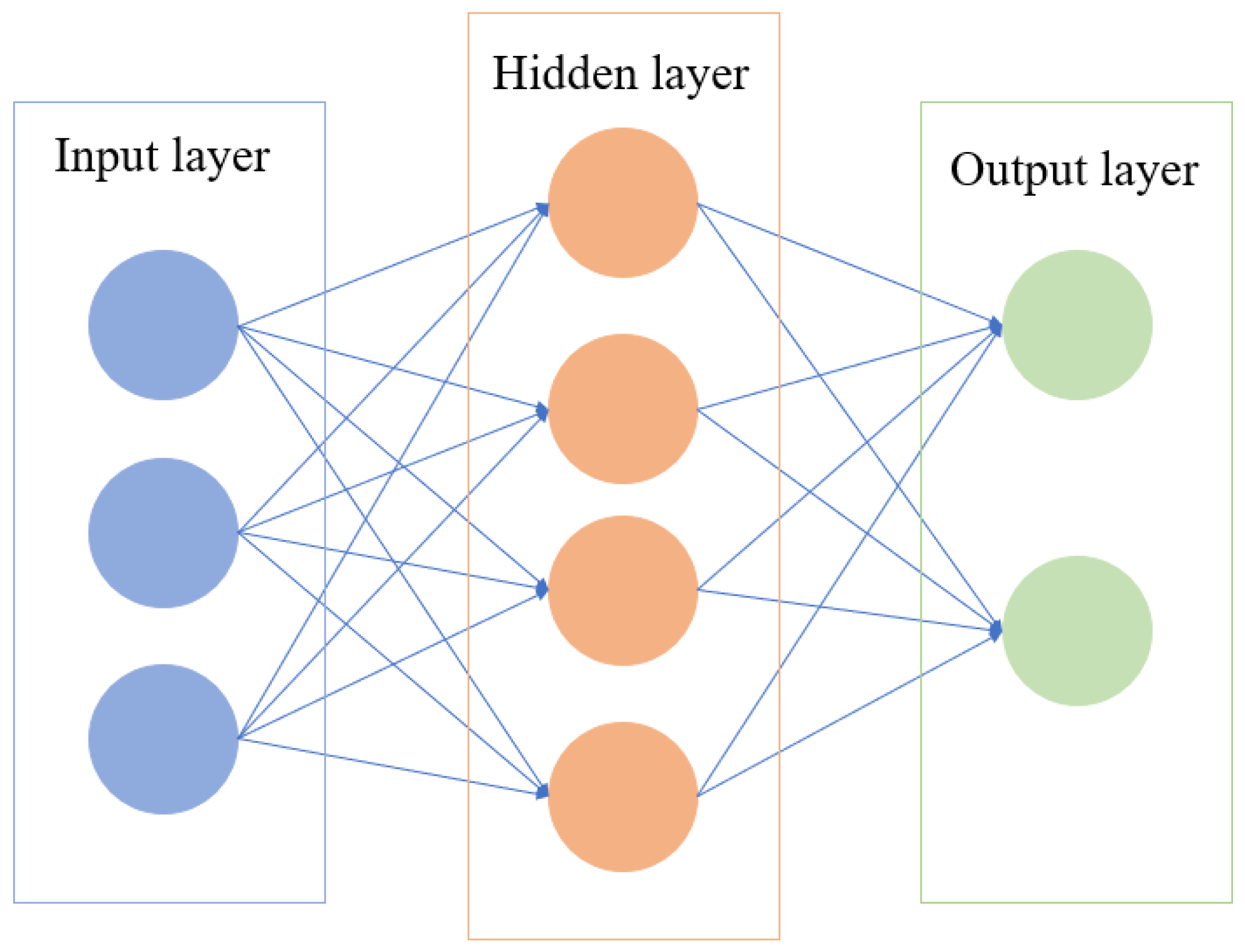
2.4.2. Machine Learning
2.5. Others
2.6. Discussion of Path Planning Classification
3. Decision Making
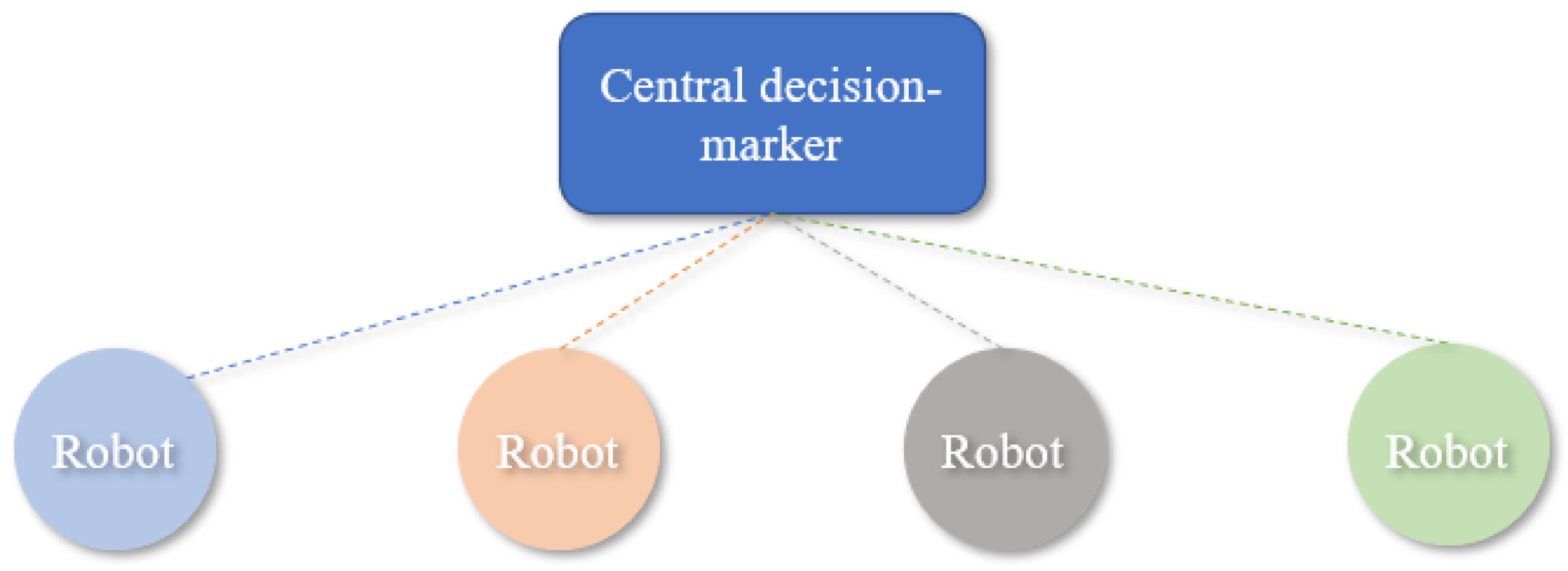
3.1. Centralized
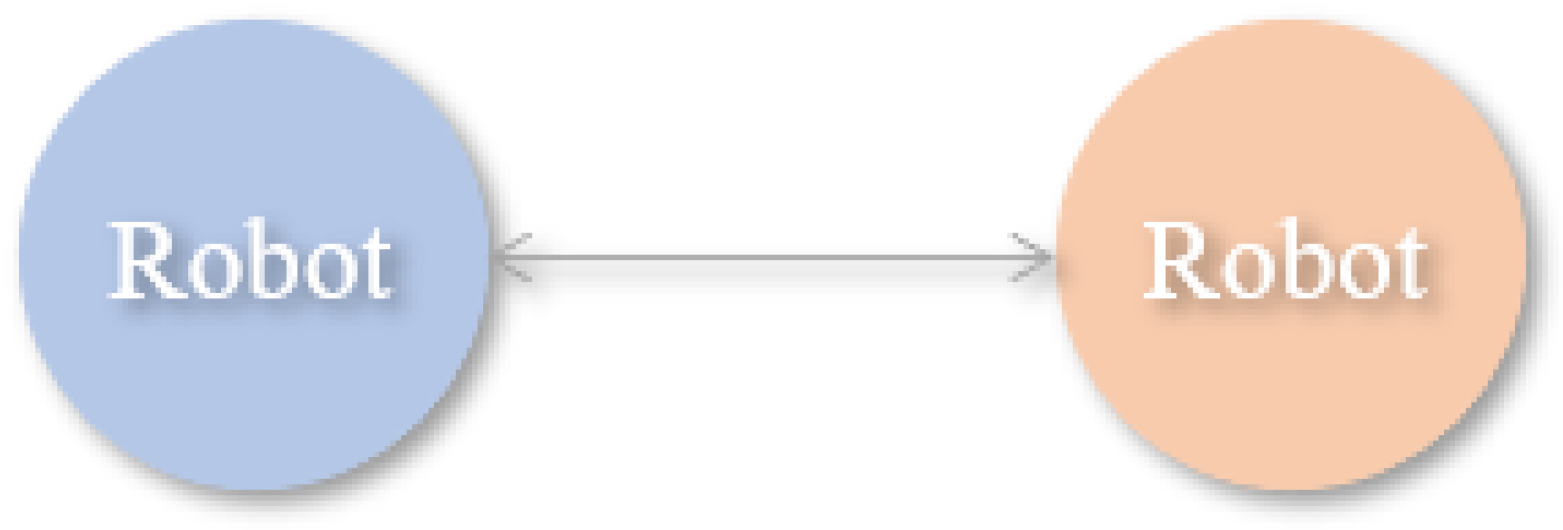
3.2. Decentralized
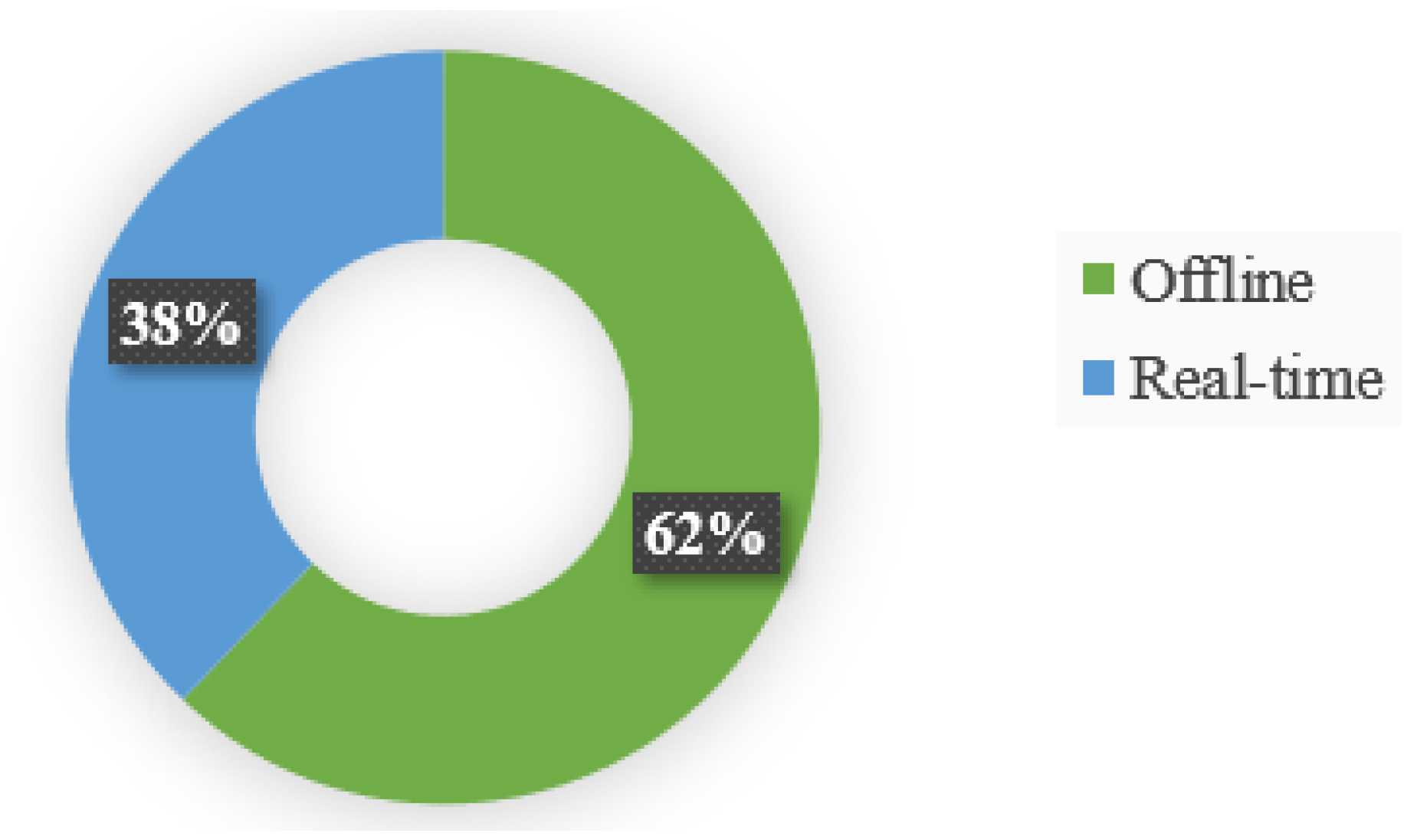
3.3. Discussion of Decision-Making Strategies
4. Discussion and Conclusions
4.1. Multi-Robot Path Planning
4.2. Decision-Making
4.3. Challenge
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| AGV | Automated Guided Vehicle |
| USV | Unmanned Surface Vessel |
| AUV | Autonomous Underwater Vehicle |
| AI | Artificial Intelligence |
| APF | Artificial Potential Field |
| RRT | Rapidly exploring Random Tree |
| PSO | Particle Swarm Optimization |
| GBD | Grid Blocking Degree |
| GA | Genetic Algorithm |
| PIO | Pigeon-Inspired Optimization |
| GWO | Grey Wolf Optimizer |
| RVO | Reciprocal Velocity Obstacles |
| SIC | Simultaneous Inform and Connect |
| PRM | Probabilistic Road Map |
| D* | Dynamic A* |
References
- Cardarelli, E.; Digani, V.; Sabattini, L.; Secchi, C.; Fantuzzi, C. Cooperative cloud robotics architecture for the coordination of multi-AGV systems in industrial warehouses. Mechatronics 2017, 45, 1–13. [Google Scholar] [CrossRef]
- Tevyashov, G.K.; Mamchenko, M.V.; Migachev, A.N.; Galin, R.R.; Kulagin, K.A.; Trefilov, P.M.; Onisimov, R.O.; Goloburdin, N.V. Algorithm for Multi-drone Path Planning and Coverage of Agricultural Fields. In Agriculture Digitalization and Organic Production; Smart Innovation, Systems and Technologies; Springer: Berlin/Heidelberg, Germany, 2022; Chapter 25; pp. 299–310. [Google Scholar] [CrossRef]
- Ahmed, N.; Pawase, C.J.; Chang, K. Distributed 3-D Path Planning for Multi-UAVs with Full Area Surveillance Based on Particle Swarm Optimization. Appl. Sci. 2021, 11, 3417. [Google Scholar] [CrossRef]
- Berger, J.; Lo, N. An innovative multi-agent search-and-rescue path-planning approach. Comput. Oper. Res. 2015, 53, 24–31. [Google Scholar] [CrossRef]
- Nagasawa, R.; Mas, E.; Moya, L.; Koshimura, S. Model-based analysis of multi-UAV path planning for surveying postdisaster building damage. Sci. Rep. 2021, 11, 18588. [Google Scholar] [CrossRef]
- Pereira, T.; Moreira, A.P.G.M.; Veloso, M. Multi-Robot Planning for Perception of Multiple Regions of Interest. In ROBOT 2017: Third Iberian Robotics Conference; Advances in Intelligent Systems and Computing; Springer: Berlin/Heidelberg, Germany, 2018; Chapter 23; pp. 275–286. [Google Scholar] [CrossRef]
- Tian, S.; Li, Y.; Kang, Y.; Xia, J. Multi-robot path planning in wireless sensor networks based on jump mechanism PSO and safety gap obstacle avoidance. Future Gener. Comput. Syst. 2021, 118, 37–47. [Google Scholar] [CrossRef]
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Emaru, T. Symbiotic Navigation in Multi-Robot Systems with Remote Obstacle Knowledge Sharing. Sensors 2017, 17, 1581. [Google Scholar] [CrossRef]
- Li, H.; Zhao, T.; Dian, S. Prioritized planning algorithm for multi-robot collision avoidance based on artificial untraversable vertex. Appl. Intell. 2021, 52, 429–451. [Google Scholar] [CrossRef]
- Cruz, D.L.; Yu, W. Path planning of multi-agent systems in unknown environment with neural kernel smoothing and reinforcement learning. Neurocomputing 2017, 233, 34–42. [Google Scholar] [CrossRef]
- Kyprianou, G.; Doitsidis, L.; Chatzichristofis, S.A. Towards the Achievement of Path Planning with Multi-robot Systems in Dynamic Environments. J. Intell. Robot. Syst. 2021, 104, 15. [Google Scholar] [CrossRef]
- Liu, Y.; Jiang, C.; Zhang, X.; Mourelatos, Z.P.; Barthlow, D.; Gorsich, D.; Singh, A.; Hu, Z. Reliability-Based Multivehicle Path Planning Under Uncertainty Using a Bio-Inspired Approach. J. Mech. Des. 2022, 144, 091701. [Google Scholar] [CrossRef]
- Shi, W.; He, Z.; Tang, W.; Liu, W.; Ma, Z. Path Planning of Multi-Robot Systems With Boolean Specifications Based on Simulated Annealing. IEEE Robot. Autom. Lett. 2022, 7, 6091–6098. [Google Scholar] [CrossRef]
- Han, S.D.; Rodriguez, E.J.; Yu, J. SEAR: A Polynomial-Time Multi-Robot Path Planning Algorithm with Expected Constant-Factor Optimality Guarantee. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1–9. [Google Scholar] [CrossRef]
- MahmoudZadeh, S.; Abbasi, A.; Yazdani, A.; Wang, H.; Liu, Y. Uninterrupted path planning system for Multi-USV sampling mission in a cluttered ocean environment. Ocean. Eng. 2022, 254, 111328. [Google Scholar] [CrossRef]
- Cai, W.; Zhang, M.; Zheng, Y.R. Task Assignment and Path Planning for Multiple Autonomous Underwater Vehicles Using 3D Dubins Curves (dagger). Sensors 2017, 17, 1607. [Google Scholar] [CrossRef] [PubMed]
- Lurz, H.; Recker, T.; Raatz, A. Spline-based Path Planning and Reconfiguration for Rigid Multi-Robot Formations. Procedia CIRP 2022, 106, 174–179. [Google Scholar] [CrossRef]
- Kapoutsis, A.C.; Chatzichristofis, S.A.; Doitsidis, L.; de Sousa, J.B.; Pinto, J.; Braga, J.; Kosmatopoulos, E.B. Real-time adaptive multi-robot exploration with application to underwater map construction. Auton. Robot. 2015, 40, 987–1015. [Google Scholar] [CrossRef]
- Yu, J.; Rus, D. An Effective Algorithmic Framework for Near Optimal Multi-robot Path Planning. In Robotics Research; Springer Proceedings in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2018; Chapter 30; pp. 495–511. [Google Scholar] [CrossRef]
- Öztürk, S.; Kuzucuoğlu, A.E. Optimal bid valuation using path finding for multi-robot task allocation. J. Intell. Manuf. 2014, 26, 1049–1062. [Google Scholar] [CrossRef]
- Regev, T.; Indelman, V. Decentralized multi-robot belief space planning in unknown environments via identification and efficient re-evaluation of impacted paths. Auton. Robot. 2017, 42, 691–713. [Google Scholar] [CrossRef]
- Veeramani, S.; Muthuswamy, S. Hybrid type multi-robot path planning of a serial manipulator and SwarmItFIX robots in sheet metal milling process. Complex Intell. Syst. 2021, 8, 2937–2954. [Google Scholar] [CrossRef]
- Gul, F.; Mir, I.; Abualigah, L.; Sumari, P.; Forestiero, A. A Consolidated Review of Path Planning and Optimization Techniques: Technical Perspectives and Future Directions. Electronics 2021, 10, 2250. [Google Scholar] [CrossRef]
- Patle, B.K.; Babu, L.G.; Pandey, A.; Parhi, D.R.K.; Jagadeesh, A. A review: On path planning strategies for navigation of mobile robot. Def. Technol. 2019, 15, 582–606. [Google Scholar] [CrossRef]
- Sanchez-Ibanez, J.R.; Perez-Del-Pulgar, C.J.; Garcia-Cerezo, A. Path Planning for Autonomous Mobile Robots: A Review. Sensors 2021, 21, 7898. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.Y.; Lin, W.M.; Chen, A.X. Path Planning for the Mobile Robot: A Review. Symmetry 2018, 10, 450. [Google Scholar] [CrossRef]
- Chen, Y.; Yu, J.; Su, X.; Luo, G. Path Planning for Multi-UAV Formation. J. Intell. Robot. Syst. 2014, 77, 229–246. [Google Scholar] [CrossRef]
- Chen, H.; Wang, Q.; Yu, M.; Cao, J.; Sun, J. Path Planning for Multi-robot Systems in Intelligent Warehouse. In Internet and Distributed Computing Systems; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2018; Chapter 13; pp. 148–159. [Google Scholar] [CrossRef]
- Nazarahari, M.; Khanmirza, E.; Doostie, S. Multi-objective multi-robot path planning in continuous environment using an enhanced genetic algorithm. Expert Syst. Appl. 2019, 115, 106–120. [Google Scholar] [CrossRef]
- Wang, X.; Sahin, A.; Bhattacharya, S. Coordination-free Multi-robot Path Planning for Congestion Reduction Using Topological Reasoning. arXiv 2022. [Google Scholar] [CrossRef]
- Wang, B.; Zhou, K.; Qu, J. Research on Multi-robot Local Path Planning Based on Improved Artificial Potential Field Method. In Proceedings of the Fifth Euro-China Conference on Intelligent Data Analysis and Applications, Xian, China, 12–14 October 2018; Advances in Intelligent Systems and Computing. Springer: Berlin/Heidelberg, Germany, 2019. Chapter 77. pp. 684–690. [Google Scholar] [CrossRef]
- Zhao, T.; Li, H.; Dian, S. Multi-robot path planning based on improved artificial potential field and fuzzy inference system. J. Intell. Fuzzy Syst. 2020, 39, 7621–7637. [Google Scholar] [CrossRef]
- He, C.; Wan, Y.; Gu, Y.; Lewis, F.L. Integral Reinforcement Learning-Based Multi-Robot Minimum Time-Energy Path Planning Subject to Collision Avoidance and Unknown Environmental Disturbances. IEEE Control. Syst. Lett. 2021, 5, 983–988. [Google Scholar] [CrossRef]
- Xue, J.; Kong, X.; Dong, B.; Xu, M. Multi-Agent Path Planning based on MPC and DDPG. arXiv 2021. [Google Scholar] [CrossRef]
- Turki, E.; Al-Rawi, H. Multi-Robot Path-Planning Problem for a Heavy Traffic Control Application: A Survey. Int. J. Adv. Comput. Sci. Appl. 2016, 7, 179–188. [Google Scholar] [CrossRef]
- Solovey, K.; Salzman, O.; Halperin, D. Finding a needle in an exponential haystack: Discrete RRT for exploration of implicit roadmaps in multi-robot motion planning. Int. J. Robot. Res. 2016, 35, 501–513. [Google Scholar] [CrossRef]
- Shen, L.; Wang, Y.; Liu, K.; Yang, Z.; Shi, X.; Yang, X.; Jing, K. Synergistic path planning of multi-UAVs for air pollution detection of ships in ports. Transp. Res. Part E Logist. Transp. Rev. 2020, 144, 102128. [Google Scholar] [CrossRef]
- Pintado, A.; Santos, M. A First Approach to Path Planning Coverage with Multi-UAVs. In Proceedings of the 15th International Conference on Soft Computing Models in Industrial and Environmental Applications (SOCO 2020), Burgos, Spain, 16–18 September 2020; Advances in Intelligent Systems and Computing. Springer: Berlin/Heidelberg, Germany, 2021. Chapter 64. pp. 667–677. [Google Scholar] [CrossRef]
- Yu, J. Intractability of Optimal Multirobot Path Planning on Planar Graphs. IEEE Robot. Autom. Lett. 2016, 1, 33–40. [Google Scholar] [CrossRef]
- Nedjati, A.; Izbirak, G.; Vizvari, B.; Arkat, J. Complete Coverage Path Planning for a Multi-UAV Response System in Post-Earthquake Assessment. Robotics 2016, 5, 26. [Google Scholar] [CrossRef] [Green Version]
- Avellar, G.S.; Pereira, G.A.; Pimenta, L.C.; Iscold, P. Multi-UAV Routing for Area Coverage and Remote Sensing with Minimum Time. Sensors 2015, 15, 27783–27803. [Google Scholar] [CrossRef]
- Cho, S.W.; Park, J.H.; Park, H.J.; Kim, S. Multi-UAV Coverage Path Planning Based on Hexagonal Grid Decomposition in Maritime Search and Rescue. Mathematics 2021, 10, 83. [Google Scholar] [CrossRef]
- Turki, E.; Al-Rawi, H. MRPPSim: A Multi-Robot Path Planning Simulation. Int. J. Adv. Comput. Sci. Appl. 2016, 7, 145–155. [Google Scholar] [CrossRef]
- Dutta, A.; Bhattacharya, A.; Kreidl, O.P.; Ghosh, A.; Dasgupta, P. Multi-robot informative path planning in unknown environments through continuous region partitioning. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420970461. [Google Scholar] [CrossRef]
- Huang, S.K.; Wang, W.J.; Sun, C.H. A Path Planning Strategy for Multi-Robot Moving with Path-Priority Order Based on a Generalized Voronoi Diagram. Appl. Sci. 2021, 11, 9650. [Google Scholar] [CrossRef]
- Zheng, H.; Yuan, J. An Integrated Mission Planning Framework for Sensor Allocation and Path Planning of Heterogeneous Multi-UAV Systems. Sensors 2021, 21, 3557. [Google Scholar] [CrossRef]
- Yuan, Z.; Yang, Z.; Lv, L.; Shi, Y. A Bi-Level Path Planning Algorithm for Multi-AGV Routing Problem. Electronics 2020, 9, 1351. [Google Scholar] [CrossRef]
- Sun, X.; Liu, Y.; Yao, W.; Qi, N. Triple-stage path prediction algorithm for real-time mission planning of multi-UAV. Electron. Lett. 2015, 51, 1490–1492. [Google Scholar] [CrossRef]
- Singh, A.K. Fault-Detection on Multi-Robot Path Planning. Int. J. Adv. Res. Comput. Sci. 2017, 8, 539–543. [Google Scholar] [CrossRef]
- Wang, Z.; Zlatanova, S. Multi-agent based path planning for first responders among moving obstacles. Comput. Environ. Urban Syst. 2016, 56, 48–58. [Google Scholar] [CrossRef]
- Zagradjanin, N.; Pamucar, D.; Jovanovic, K. Cloud-Based Multi-Robot Path Planning in Complex and Crowded Environment with Multi-Criteria Decision Making using Full Consistency Method. Symmetry 2019, 11, 1241. [Google Scholar] [CrossRef]
- Serpen, G.; Dou, C. Automated robotic parking systems: Real-time, concurrent and multi-robot path planning in dynamic environments. Appl. Intell. 2014, 42, 231–251. [Google Scholar] [CrossRef]
- Salerno, M.; E-Martín, Y.; Fuentetaja, R.; Gragera, A.; Pozanco, A.; Borrajo, D. Train Route Planning as a Multi-agent Path Finding Problem. In Advances in Artificial Intelligence; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2021; Chapter 23; pp. 237–246. [Google Scholar] [CrossRef]
- Bae, J.; Chung, W. Efficient path planning for multiple transportation robots under various loading conditions. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419835110. [Google Scholar] [CrossRef]
- Gujarathi, D.; Saha, I. MT*: Multi-Robot Path Planning for Temporal Logic Specifications. arXiv 2021. [Google Scholar] [CrossRef]
- Modi, V.; Chen, Y.; Madan, A.; Sueda, S.; Levin, D.I.W. Multi-Agent Path Planning with Asymmetric Interactions In Tight Spaces. arXiv 2022. [Google Scholar] [CrossRef]
- Yu, N.N.; Li, T.K.; Wang, B.L.; Yuan, S.P.; Wang, Y. Reliability oriented multi-AGVs online scheduling and path planning problem of automated sorting warehouse system. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1043, 22035. [Google Scholar] [CrossRef]
- Luna, M.A.; Ale Isaac, M.S.; Ragab, A.R.; Campoy, P.; Flores Pena, P.; Molina, M. Fast Multi-UAV Path Planning for Optimal Area Coverage in Aerial Sensing Applications. Sensors 2022, 22, 2297. [Google Scholar] [CrossRef]
- Kim, H.; Kim, D.; Kim, H.; Shin, J.U.; Myung, H. An extended any-angle path-planning algorithm for maintaining formation of multi-agent jellyfish elimination robot system. Int. J. Control. Autom. Syst. 2016, 14, 598–607. [Google Scholar] [CrossRef]
- Mobarez, E.N.; Sarhan, A.; Ashry, M.M. Obstacle avoidance for multi-UAV path planning based on particle swarm optimization. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1172, 12039. [Google Scholar] [CrossRef]
- Chen, Z.; Wu, H.; Chen, Y.; Cheng, L.; Zhang, B. Patrol robot path planning in nuclear power plant using an interval multi-objective particle swarm optimization algorithm. Appl. Soft Comput. 2022, 116, 108192. [Google Scholar] [CrossRef]
- Chen, Y.; Ren, S.; Chen, Z.; Chen, M.; Wu, H. Path Planning for Vehicle-borne System Consisting of Multi Air–ground Robots. Robotica 2019, 38, 493–511. [Google Scholar] [CrossRef]
- Das, P.K.; Behera, H.S.; Das, S.; Tripathy, H.K.; Panigrahi, B.K.; Pradhan, S.K. A hybrid improved PSO-DV algorithm for multi-robot path planning in a clutter environment. Neurocomputing 2016, 207, 735–753. [Google Scholar] [CrossRef]
- He, W.; Qi, X.; Liu, L. A novel hybrid particle swarm optimization for multi-UAV cooperate path planning. Appl. Intell. 2021, 51, 7350–7364. [Google Scholar] [CrossRef]
- Panda, M.R.; Das, P.; Pradhan, S. Hybridization of IWO and IPSO for mobile robots navigation in a dynamic environment. J. King Saud Univ. Comput. Inf. Sci. 2020, 32, 1020–1033. [Google Scholar] [CrossRef]
- Shao, Z.; Yan, F.; Zhou, Z.; Zhu, X. Path Planning for Multi-UAV Formation Rendezvous Based on Distributed Cooperative Particle Swarm Optimization. Appl. Sci. 2019, 9, 2621. [Google Scholar] [CrossRef]
- Paikray, H.K.; Das, P.K.; Panda, S. Optimal Multi-robot Path Planning Using Particle Swarm Optimization Algorithm Improved by Sine and Cosine Algorithms. Arab. J. Sci. Eng. 2021, 46, 3357–3381. [Google Scholar] [CrossRef]
- Tang, B.; Xiang, K.; Pang, M.; Zhanxia, Z. Multi-robot path planning using an improved self-adaptive particle swarm optimization. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420936154. [Google Scholar] [CrossRef]
- Das, P.K.; Behera, H.S.; Panigrahi, B.K. A hybridization of an improved particle swarm optimization and gravitational search algorithm for multi-robot path planning. Swarm Evol. Comput. 2016, 28, 14–28. [Google Scholar] [CrossRef]
- Sahu, B.; Kumar Das, P.; Kabat, M.R. Multi-robot cooperation and path planning for stick transporting using improved Q-learning and democratic robotics PSO. J. Comput. Sci. 2022, 60, 101637. [Google Scholar] [CrossRef]
- Zhong, M.; Yang, Y.; Dessouky, Y.; Postolache, O. Multi-AGV scheduling for conflict-free path planning in automated container terminals. Comput. Ind. Eng. 2020, 142, 106371. [Google Scholar] [CrossRef]
- Saeed, R.A.; Reforgiato Recupero, D.; Remagnino, P. The boundary node method for multi-robot multi-goal path planning problems. Expert Syst. 2021, 38, e12691. [Google Scholar] [CrossRef]
- Song, J.; Liu, L.; Liu, Y.; Xi, J.; Zhai, W.; Yang, G. Path Planning for Multi-Vehicle-Assisted Multi-UAVs in Mobile Crowdsensing. Wirel. Commun. Mob. Comput. 2022, 2022, 9778188. [Google Scholar] [CrossRef]
- Ru, J.; Yu, S.; Wu, H.; Li, Y.; Wu, C.; Jia, Z.; Xu, H. A Multi-AUV Path Planning System Based on the Omni-Directional Sensing Ability. J. Mar. Sci. Eng. 2021, 9, 806. [Google Scholar] [CrossRef]
- Sun, G.; Zhou, R.; Di, B.; Dong, Z.; Wang, Y. A Novel Cooperative Path Planning for Multi-robot Persistent Coverage with Obstacles and Coverage Period Constraints. Sensors 2019, 19, 1994. [Google Scholar] [CrossRef]
- Yanes Luis, S.; Peralta, F.; Tapia Córdoba, A.; Rodríguez del Nozal, Á.R.; Toral Marín, S.; Gutiérrez Reina, D. An evolutionary multi-objective path planning of a fleet of ASVs for patrolling water resources. Eng. Appl. Artif. Intell. 2022, 112, 104852. [Google Scholar] [CrossRef]
- Sun, R.; Tang, C.; Zheng, J.; Zhou, Y.; Yu, S. Multi-robot Path Planning for Complete Coverage with Genetic Algorithms. In Intelligent Robotics and Applications; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2019; Chapter 29; pp. 349–361. [Google Scholar] [CrossRef]
- Xu, M.; Xin, B.; Dou, L.; Gao, G. A Cell Potential and Motion Pattern Driven Multi-robot Coverage Path Planning Algorithm. In Bio-inspired Computing: Theories and Applications; Communications in Computer and Information Science; Springer: Berlin/Heidelberg, Germany, 2020; Chapter 36; pp. 468–483. [Google Scholar] [CrossRef]
- Sarkar, R.; Barman, D.; Chowdhury, N. A Cooperative Co-evolutionary Genetic Algorithm for Multi-Robot Path Planning Having Multiple Targets. In Computational Intelligence in Pattern Recognition; Advances in Intelligent Systems and Computing; Springer: Berlin/Heidelberg, Germany, 2020; Chapter 63; pp. 724–740. [Google Scholar] [CrossRef]
- Farooq, B.; Bao, J.; Raza, H.; Sun, Y.; Ma, Q. Flow-shop path planning for multi-automated guided vehicles in intelligent textile spinning cyber-physical production systems dynamic environment. J. Manuf. Syst. 2021, 59, 98–116. [Google Scholar] [CrossRef]
- Han, Z.; Wang, D.; Liu, F.; Zhao, Z. Multi-AGV path planning with double-path constraints by using an improved genetic algorithm. PLoS ONE 2017, 12, e0181747. [Google Scholar] [CrossRef]
- Xu, W. Path Planning for Multi-AGV Systems based on Two-Stage Scheduling. Int. J. Perform. Eng. 2017, 13, 1347–1357. [Google Scholar] [CrossRef]
- Huang, H.; Zhuo, T. Multi-model cooperative task assignment and path planning of multiple UCAV formation. Multimed. Tools Appl. 2017, 78, 415–436. [Google Scholar] [CrossRef]
- Yi, G.; Feng, Z.; Mei, T.; Li, P.; Jin, W.; Chen, S. Multi-AGVs path planning based on improved ant colony algorithm. J. Supercomput. 2019, 75, 5898–5913. [Google Scholar] [CrossRef]
- Liu, J.; Anavatti, S.; Garratt, M.; Abbass, H.A. Modified continuous Ant Colony Optimisation for multiple Unmanned Ground Vehicle path planning. Expert Syst. Appl. 2022, 196, 116605. [Google Scholar] [CrossRef]
- Huang, L.; Qu, H.; Ji, P.; Liu, X.; Fan, Z. A novel coordinated path planning method using k-degree smoothing for multi-UAVs. Appl. Soft Comput. 2016, 48, 182–192. [Google Scholar] [CrossRef]
- Botteghi, N.; Kamilaris, A.; Sinai, L.; Sirmacek, B. Multi-Agent Path Planning of Robotic Swarms in Agricultural Fields. ISPRS Ann. Photogramm. Remote. Sens. Spat. Inf. Sci. 2020, 1, 361–368. [Google Scholar] [CrossRef]
- Zhang, D.; Duan, H. Social-class pigeon-inspired optimization and time stamp segmentation for multi-UAV cooperative path planning. Neurocomputing 2018, 313, 229–246. [Google Scholar] [CrossRef]
- Wang, B.H.; Wang, D.B.; Ali, Z.A. A Cauchy mutant pigeon-inspired optimization–based multi-unmanned aerial vehicle path planning method. Meas. Control 2020, 53, 83–92. [Google Scholar] [CrossRef]
- Xu, C.; Xu, M.; Yin, C. Optimized multi-UAV cooperative path planning under the complex confrontation environment. Comput. Commun. 2020, 162, 196–203. [Google Scholar] [CrossRef]
- Zhou, M.; Wang, Z.; Wang, J.; Dong, Z. A Hybrid Path Planning and Formation Control Strategy of Multi-Robots in a Dynamic Environment. J. Adv. Comput. Intell. Intell. Inform. 2022, 26, 342–354. [Google Scholar] [CrossRef]
- Huang, G.; Cai, Y.; Liu, J.; Qi, Y.; Liu, X. A Novel Hybrid Discrete Grey Wolf Optimizer Algorithm for Multi-UAV Path Planning. J. Intell. Robot. Syst. 2021, 103, 49. [Google Scholar] [CrossRef]
- Shi, K.; Zhang, X.; Xia, S. Multiple Swarm Fruit Fly Optimization Algorithm Based Path Planning Method for Multi-UAVs. Appl. Sci. 2020, 10, 2822. [Google Scholar] [CrossRef]
- Das, P.K.; Behera, H.S.; Jena, P.K.; Panigrahi, B.K. Multi-robot path planning in a dynamic environment using improved gravitational search algorithm. J. Electr. Syst. Inf. Technol. 2016, 3, 295–313. [Google Scholar] [CrossRef]
- Das, P.K. Hybridization of Kidney-Inspired and Sine–Cosine Algorithm for Multi-robot Path Planning. Arab. J. Sci. Eng. 2019, 45, 2883–2900. [Google Scholar] [CrossRef]
- Panda, M.R.; Dutta, S.; Pradhan, S. Hybridizing Invasive Weed Optimization with Firefly Algorithm for Multi-Robot Motion Planning. Arab. J. Sci. Eng. 2017, 43, 4029–4039. [Google Scholar] [CrossRef]
- Kok, K.Y.; Rajendran, P. Differential-Evolution Control Parameter Optimization for Unmanned Aerial Vehicle Path Planning. PLoS ONE 2016, 11, e0150558. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Wang, P.; Yang, L.; Liu, Y.; Lu, Y.; Zhu, X. Novel Swarm Intelligence Algorithm for Global Optimization and Multi-UAVs Cooperative Path Planning: Anas Platyrhynchos Optimizer. Appl. Sci. 2020, 10, 4821. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, M.; Zhang, S.; Zheng, R.; Dong, S. Multi-AUV Adaptive Path Planning and Cooperative Sampling for Ocean Scalar Field Estimation. IEEE Trans. Instrum. Meas. 2022, 71, 9505514. [Google Scholar] [CrossRef]
- Chen, Z.; Alonso-Mora, J.; Bai, X.; Harabor, D.D.; Stuckey, P.J. Integrated Task Assignment and Path Planning for Capacitated Multi-Agent Pickup and Delivery. IEEE Robot. Autom. Lett. 2021, 6, 5816–5823. [Google Scholar] [CrossRef]
- Deng, L.; Ma, X.; Gu, J.; Li, Y.; Xu, Z.; Wang, Y. Artificial Immune Network-Based Multi-Robot Formation Path Planning with Obstacle Avoidance. Int. J. Robot. Autom. 2016, 31, 233–242. [Google Scholar] [CrossRef]
- Kang, Y.T.; Chen, W.J.; Zhu, D.Q.; Wang, J.H. Collision avoidance path planning in multi-ship encounter situations. J. Mar. Sci. Technol. 2021, 26, 1026–1037. [Google Scholar] [CrossRef]
- Liang, J.H.; Lee, C.H. Efficient collision-free path-planning of multiple mobile robots system using efficient artificial bee colony algorithm. Adv. Eng. Softw. 2015, 79, 47–56. [Google Scholar] [CrossRef]
- Al-Jarrah, R.; Shahzad, A.; Roth, H. Path Planning and Motion Coordination for Multi-Robots System Using Probabilistic Neuro-Fuzzy. IFAC-PapersOnLine 2015, 48, 46–51. [Google Scholar] [CrossRef]
- Pandey, A.; Parhi, D.R. Optimum path planning of mobile robot in unknown static and dynamic environments using Fuzzy-Wind Driven Optimization algorithm. Def. Technol. 2017, 13, 47–58. [Google Scholar] [CrossRef]
- K, R.; R, B.; Panchu K, P.; M, R. A novel fuzzy and reverse auction-based algorithm for task allocation with optimal path cost in multi-robot systems. Concurr. Comput. Pract. Exp. 2021, 34, e6716. [Google Scholar] [CrossRef]
- Zohdi, T.I. The Game of Drones: Rapid agent-based machine-learning models for multi-UAV path planning. Comput. Mech. 2019, 65, 217–228. [Google Scholar] [CrossRef]
- Zhu, D.; Liu, Y.; Sun, B. Task Assignment and Path Planning of a Multi-AUV System Based on a Glasius Bio-Inspired Self-Organising Map Algorithm. J. Navig. 2017, 71, 482–496. [Google Scholar] [CrossRef]
- Cao, X.; Zhu, D. Multi-AUV task assignment and path planning with ocean current based on biological inspired self-organizing map and velocity synthesis algorithm. Intell. Autom. Soft Comput. 2015, 23, 31–39. [Google Scholar] [CrossRef]
- Bae, H.; Kim, G.; Kim, J.; Qian, D.; Lee, S. Multi-Robot Path Planning Method Using Reinforcement Learning. Appl. Sci. 2019, 9, 57. [Google Scholar] [CrossRef] [Green Version]
- Zhu, D.; Lv, R.; Cao, X.; Yang, S.X. Multi-AUV Hunting Algorithm Based on Bio-inspired Neural Network in Unknown Environments. Int. J. Adv. Robot. Syst. 2015, 12, 166. [Google Scholar] [CrossRef]
- Zhu, D.; Zhou, B.; Yang, S.X. A Novel Algorithm of Multi-AUVs Task Assignment and Path Planning Based on Biologically Inspired Neural Network Map. IEEE Trans. Intell. Veh. 2021, 6, 333–342. [Google Scholar] [CrossRef]
- Çetinkaya, M. Multi-Agent Path Planning Using Deep Reinforcement Learning. arXiv 2021. [Google Scholar] [CrossRef]
- Hu, H.; Yang, X.; Xiao, S.; Wang, F. Anti-conflict AGV path planning in automated container terminals based on multi-agent reinforcement learning. Int. J. Prod. Res. 2021, ahead-of-print. 1–16. [Google Scholar] [CrossRef]
- Li, B.; Liang, H. Multi-Robot Path Planning Method Based on Prior Knowledge and Q-learning Algorithms. J. Physics. Conf. Ser. 2020, 1624, 42008. [Google Scholar] [CrossRef]
- Chang, H.; Chen, Y.; Zhang, B.; Doermann, D. Multi-UAV Mobile Edge Computing and Path Planning Platform Based on Reinforcement Learning. IEEE Trans. Emerg. Top. Comput. Intell. 2022, 6, 489–498. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, B.; Zhang, M.; Zhang, S.; Guo, D. Multi-UAV Collaborative Path Planning Method Based on Attention Mechanism. Math. Probl. Eng. 2021, 2021, 6964875. [Google Scholar] [CrossRef]
- Yang, Y.; Juntao, L.; Lingling, P. Multi-robot path planning based on a deep reinforcement learning DQN algorithm. CAAI Trans. Intell. Technol. 2020, 5, 177–183. [Google Scholar] [CrossRef]
- Wen, S.; Wen, Z.; Zhang, D.; Zhang, H.; Wang, T. A multi-robot path-planning algorithm for autonomous navigation using meta-reinforcement learning based on transfer learning. Appl. Soft Comput. 2021, 110, 107605. [Google Scholar] [CrossRef]
- Shiri, H.; Seo, H.; Park, J.; Bennis, M. Attention Based Communication and Control for Multi-UAV Path Planning. IEEE Wirel. Commun. Lett. 2022, 11, 1409–1413. [Google Scholar] [CrossRef]
- Luviano, D.; Yu, W. Continuous-time path planning for multi-agents with fuzzy reinforcement learning. J. Intell. Fuzzy Syst. 2017, 33, 491–501. [Google Scholar] [CrossRef]
- Guo, T.; Yu, J. Sub-1.5 Time-Optimal Multi-Robot Path Planning on Grids in Polynomial Time. arXiv 2022. [Google Scholar] [CrossRef]
- Lopez, B.; Munoz, J.; Quevedo, F.; Monje, C.A.; Garrido, S.; Moreno, L.E. Path Planning and Collision Risk Management Strategy for Multi-UAV Systems in 3D Environments. Sensors 2021, 21, 4414. [Google Scholar] [CrossRef] [PubMed]
- Munoz, J.; Lopez, B.; Quevedo, F.; Monje, C.A.; Garrido, S.; Moreno, L.E. Multi UAV Coverage Path Planning in Urban Environments. Sensors 2021, 21, 7365. [Google Scholar] [CrossRef] [PubMed]
- Alotaibi, E.T.S.; Al-Rawi, H. A complete multi-robot path-planning algorithm. Auton. Agents Multi-Agent Syst. 2018, 32, 693–740. [Google Scholar] [CrossRef]
- Yu, J. Average case constant factor time and distance optimal multi-robot path planning in well-connected environments. Auton. Robot. 2019, 44, 469–483. [Google Scholar] [CrossRef]
- Kapoutsis, A.C.; Chatzichristofis, S.A.; Kosmatopoulos, E.B. DARP: Divide Areas Algorithm for Optimal Multi-Robot Coverage Path Planning. J. Intell. Robot. Syst. 2017, 86, 663–680. [Google Scholar] [CrossRef]
- Olofsson, J.; Hendeby, G.; Lauknes, T.R.; Johansen, T.A. Multi-agent informed path planning using the probability hypothesis density. Auton. Robot. 2020, 44, 913–925. [Google Scholar] [CrossRef]
- Wang, W.; Goh, W.B. An iterative approach for makespan-minimized multi-agent path planning in discrete space. Auton. Agents -Multi-Agent Syst. 2014, 29, 335–363. [Google Scholar] [CrossRef]
- Choi, Y.; Choi, Y.; Briceno, S.; Mavris, D.N. Energy-Constrained Multi-UAV Coverage Path Planning for an Aerial Imagery Mission Using Column Generation. J. Intell. Robot. Syst. 2019, 97, 125–139. [Google Scholar] [CrossRef]
- Koval, A.; Sharif Mansouri, S.; Nikolakopoulos, G. Multi-Agent Collaborative Path Planning Based on Staying Alive Policy. Robotics 2020, 9, 101. [Google Scholar] [CrossRef]
- Wang, H.; Chen, W. Multi-Robot Path Planning With Due Times. IEEE Robot. Autom. Lett. 2022, 7, 4829–4836. [Google Scholar] [CrossRef]
- Tatino, C.; Pappas, N.; Yuan, D. Multi-Robot Association-Path Planning in Millimeter-Wave Industrial Scenarios. IEEE Netw. Lett. 2020, 2, 190–194. [Google Scholar] [CrossRef]
- Zhang, H.; Luo, J.; Long, J.; Huang, Y.; Wu, W. Multi-robot Path Planning Using Petri Nets. In Verification and Evaluation of Computer and Communication Systems; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2020; Chapter 2; pp. 15–26. [Google Scholar] [CrossRef]
- Huo, J.; Zheng, R.; Liu, M.; Zhang, S. Integer-Programming-Based Narrow-Passage Multi-Robot Path Planning with Effective Heuristics. arXiv 2021. [Google Scholar] [CrossRef]
- Haciomeroglu, M. Congestion-free multi-agent navigation based on velocity space by using cellular automata. Adapt. Behav. 2015, 24, 18–26. [Google Scholar] [CrossRef]
- Yao, P.; Wang, H.; Su, Z. Cooperative path planning with applications to target tracking and obstacle avoidance for multi-UAVs. Aerosp. Sci. Technol. 2016, 54, 10–22. [Google Scholar] [CrossRef]
- Melin, J.; Lauri, M.; Kolu, A.; Koljonen, J.; Ritala, R. Cooperative Sensing and Path Planning in a Multi-vehicle Environment**This work was in part (Melin, J., Ritala, R.) funded by the Academy of Finland, project “Optimization of observation subsystems in autonomous mobile machines”, O3-SAM. IFAC-PapersOnLine 2015, 48, 198–203. [Google Scholar] [CrossRef]
- Jose, K.; Pratihar, D.K. Task allocation and collision-free path planning of centralized multi-robots system for industrial plant inspection using heuristic methods. Robot. Auton. Syst. 2016, 80, 34–42. [Google Scholar] [CrossRef]
- Yamauchi, T.; Miyashita, Y.; Sugawara, T. Path and Action Planning in Non-uniform Environments for Multi-agent Pickup and Delivery Tasks. In Multi-Agent Systems; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2021; Chapter 3; pp. 37–54. [Google Scholar] [CrossRef]
- Han, S.D.; Yu, J. DDM: Fast Near-Optimal Multi-Robot Path Planning Using Diversified-Path and Optimal Sub-Problem Solution Database Heuristics. IEEE Robot. Autom. Lett. 2020, 5, 1350–1357. [Google Scholar] [CrossRef]
- Olofsson, J.; Veibäck, C.; Hendeby, G.; Johansen, T.A. Outline of a System for Integrated Adaptive Ice Tracking and Multi-Agent Path Planning. In Proceedings of the 2017 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Linkoping, Sweden, 3–5 October 2017; p. 13. [Google Scholar] [CrossRef]
- Best, G.; Faigl, J.; Fitch, R. Online planning for multi-robot active perception with self-organising maps. Auton. Robot. 2017, 42, 715–738. [Google Scholar] [CrossRef]
- Nielsen, I.; Bocewicz, G.; Saha, S. Multi-agent Path Planning Problem Under a Multi-objective Optimization Framework. In Proceedings of the 17th International Conference on Distributed Computing and Artificial Intelligence, Special Sessions, L’Aquila, Italy, 1–19 June 2020; Advances in Intelligent Systems and Computing. Springer: Berlin/Heidelberg, Germany, 2021. Chapter 1. pp. 5–14. [Google Scholar] [CrossRef]
- Hayat, S.; Yanmaz, E.; Bettstetter, C.; Brown, T.X. Multi-objective drone path planning for search and rescue with quality-of-service requirements. Auton. Robot. 2020, 44, 1183–1198. [Google Scholar] [CrossRef]
- Kiadi, M.; Villar, J.R.; Tan, Q. Synthesized A* Multi-robot Path Planning in an Indoor Smart Lab Using Distributed Cloud Computing. In Proceedings of the 15th International Conference on Soft Computing Models in Industrial and Environmental Applications (SOCO 2020), Burgos, Spain, 16–18 September 2020; Advances in Intelligent Systems and Computing. Springer: Berlin/Heidelberg, Germany, 2021. Chapter 56. pp. 580–589. [Google Scholar] [CrossRef]
- Han, G.; Qi, X.; Peng, Y.; Lin, C.; Zhang, Y.; Lu, Q. Early Warning Obstacle Avoidance-Enabled Path Planning for Multi-AUV-Based Maritime Transportation Systems. IEEE Trans. Intell. Transp. Syst. 2022, 1–12. [Google Scholar] [CrossRef]
- Dai, X.; Fan, Q.; Li, D. Research status of operational environment partitioning and path planning for multi - robot systems. J. Phys. Conf. Ser. 2017, 887, 12080. [Google Scholar] [CrossRef]
- Han, S.D.; Yu, J. Optimizing Space Utilization for More Effective Multi-Robot Path Planning. arXiv 2021. [Google Scholar] [CrossRef]
- Okumura, K.; Bonnet, F.; Tamura, Y.; Défago, X. Offline Time-Independent Multi-Agent Path Planning. arXiv 2021. [Google Scholar] [CrossRef]
- Causa, F.; Fasano, G.; Grassi, M. Multi-UAV Path Planning for Autonomous Missions in Mixed GNSS Coverage Scenarios. Sensors 2018, 18, 4188. [Google Scholar] [CrossRef]
- Digani, V.; Sabattini, L.; Secchi, C.; Fantuzzi, C. Ensemble Coordination Approach in Multi-AGV Systems Applied to Industrial Warehouses. IEEE Trans. Autom. Sci. Eng. 2015, 12, 922–934. [Google Scholar] [CrossRef]
- Andreychuk, A.; Yakovlev, K. Applying MAPP Algorithm for Cooperative Path Finding in Urban Environments. In Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2017; pp. 1–10. [Google Scholar] [CrossRef]
- Draganjac, I.; Miklic, D.; Kovacic, Z.; Vasiljevic, G.; Bogdan, S. Decentralized Control of Multi-AGV Systems in Autonomous Warehousing Applications. IEEE Trans. Autom. Sci. Eng. 2016, 13, 1433–1447. [Google Scholar] [CrossRef]
- Chouhan, S.S.; Niyogi, R. DiMPP: A complete distributed algorithm for multi-agent path planning. J. Exp. Theor. Artif. Intell. 2017, 29, 1129–1148. [Google Scholar] [CrossRef]
- Huang, X.; Cao, Q.; Zhu, X. Mixed path planning for multi-robots in structured hospital environment. J. Eng. 2019, 2019, 512–516. [Google Scholar] [CrossRef]
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Emaru, T. SHP: Smooth Hypocycloidal Paths with Collision-Free and Decoupled Multi-Robot Path Planning. Int. J. Adv. Robot. Syst. 2016, 13, 133. [Google Scholar] [CrossRef]
- Abdelkader, M.; Jaleel, H.; Shamma, J.S. A Distributed Framework for Real Time Path Planning in Practical Multi-agent Systems. IFAC-PapersOnLine 2017, 50, 10626–10631. [Google Scholar] [CrossRef]
- Li, Q.; Gama, F.; Ribeiro, A.; Prorok, A. Graph Neural Networks for Decentralized Multi-Robot Path Planning. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2021; pp. 11785–11792. [Google Scholar] [CrossRef]
- Chen, Y.; Rosolia, U.; Ames, A.D. Decentralized Task and Path Planning for Multi-Robot Systems. IEEE Robot. Autom. Lett. 2021, 6, 4337–4344. [Google Scholar] [CrossRef]
- Li, Q.; Lin, W.; Liu, Z.; Prorok, A. Message-Aware Graph Attention Networks for Large-Scale Multi-Robot Path Planning. IEEE Robot. Autom. Lett. 2021, 6, 5533–5540. [Google Scholar] [CrossRef]
- Bayerlein, H.; Theile, M.; Caccamo, M.; Gesbert, D. Multi-UAV Path Planning for Wireless Data Harvesting with Deep Reinforcement Learning. IEEE Open J. Commun. Soc. 2021, 2, 1171–1187. [Google Scholar] [CrossRef]
- Trudeau, A.; Clark, C.M. Multi-Robot Path Planning Via Genetic Programming. arXiv 2019. [Google Scholar] [CrossRef]
- Wei, C.; Hindriks, K.V.; Jonker, C.M. Altruistic coordination for multi-robot cooperative pathfinding. Appl. Intell. 2015, 44, 269–281. [Google Scholar] [CrossRef]
- Liu, T.M.; Lyons, D.M. Leveraging area bounds information for autonomous decentralized multi-robot exploration. Robot. Auton. Syst. 2015, 74, 66–78. [Google Scholar] [CrossRef]
- Matoui, F.; Boussaid, B.; Abdelkrim, M.N. Distributed path planning of a multi-robot system based on the neighborhood artificial potential field approach. Simulation 2018, 95, 637–657. [Google Scholar] [CrossRef]
- Neto, A.A.; Macharet, D.G.; Campos, M.F.M. Multi-agent Rapidly-exploring Pseudo-random Tree. J. Intell. Robot. Syst. 2017, 89, 69–85. [Google Scholar] [CrossRef]
- Lin, S.; Liu, A.; Kong, X.; Wang, J. Development of Swarm Intelligence Leader-Vicsek-Model for Multi-AGV Path Planning. In Proceedings of the 2021 20th International Symposium on Communications and Information Technologies (ISCIT), Tottori, Japan, 19–22 October 2021; pp. 49–54. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Approach | Paper | Real-Time | How to Achieve Real-Time Implementation | Experiment Results | Hybrid Approach |
|---|---|---|---|---|---|---|
| Classical | APF | [27] | N | N | N | |
| [28] | N | N | Y | |||
| [29] | N | N | Y | |||
| [30] | N | Y | Y | |||
| [31] | Y | Repulsion function | N | N | ||
| [32] | Y | Priority-based algorithm | N | Y | ||
| [33] | Y | APF | N | Y | ||
| [34] | Y | Predictive capabilities | N | Y | ||
| Classical | Sampling-based | [35] | N | N | Y | |
| [47] | N | N | Y | |||
| [36] | N | N | N | |||
| Heuristic | A* | [17] | N | N | Y | |
| [46] | N | N | Y | |||
| [48] | Y | Computational efficiency | N | Y | ||
| [49] | Y | Robot | N | N | ||
| [50] | Y | Computational efficiency | N | Y | ||
| D* | [8] | Y | Sharing mechanism for robots | Y | Y | |
| [9] | Y | Algorithm | N | Y | ||
| [51] | N | N | Y | |||
| [52] | Y | Algorithm | N | Y | ||
| Bio-inspired | PSO | [60] | N | N | N | |
| [61] | N | N | N | |||
| [62] | N | N | N | |||
| [63] | N | Y | Y | |||
| [64] | N | N | Y | |||
| [65] | N | Y | Y | |||
| [66] | N | N | N | |||
| [67] | N | N | Y | |||
| [68] | N | N | N | |||
| [69] | N | Y | Y | |||
| [70] | N | Y | Y | |||
| [15] | Y | Computational efficiency | N | Y | ||
| [7] | Y | Computational efficiency | N | Y | ||
| [71] | N | N | Y | |||
| GA | [72] | Y | Computational efficiency | Y | Y | |
| [73] | N | N | Y | |||
| [16] | N | N | Y | |||
| [74] | N | N | Y | |||
| [75] | N | N | Y | |||
| [76] | N | N | Y | |||
| [77] | N | N | Y | |||
| [78] | N | N | Y | |||
| [79] | N | N | N | |||
| [80] | Y | Simplify the model | N | N | ||
| [81] | N | N | N | |||
| [82] | Y | Two-stage strategies | N | N | ||
| [83] | Y | Computational efficiency | N | Y | ||
| ACO | [84] | N | N | Y | ||
| [85] | N | N | N | |||
| [86] | N | Y | Y | |||
| [87] | N | N | Y | |||
| PIO | [88] | N | N | Y | ||
| [89] | N | N | N | |||
| GWO | [90] | N | N | N | ||
| [91] | N | N | Y | |||
| [92] | Y | Computational efficiency | N | Y | ||
| AI-based | Fuzzy logic | [104] | N | N | Y | |
| [5] | N | N | Y | |||
| [105] | Y | Model | Y | Y | ||
| [106] | Y | Computational efficiency | N | N | ||
| Machine Learning | [107] | Y | Sensor | N | N | |
| [10] | Y | Algorithm | Y | Y | ||
| [108] | Y | Model | N | Y | ||
| [109] | Y | Algorithm | N | Y | ||
| [110] | N | N | Y | |||
| [111] | N | N | N | |||
| [112] | Y | Algorithm | N | N | ||
| [113] | N | N | Y | |||
| [114] | N | N | Y | |||
| [115] | N | N | N | |||
| [116] | Y | Model | N | N | ||
| [117] | Y | Model | N | N | ||
| [118] | Y | Algorithm | N | N | ||
| [119] | Y | Model | N | Y | ||
| [120] | Y | Model | N | Y | ||
| [121] | Y | Model | Y | Y |
| Category | Approach | Paper | Real-Time | How to Achieve Real-Time Implementation | Experiment Results | Hybrid Approach |
|---|---|---|---|---|---|---|
| Centralized | GA and A* | [139] | N | N | Y | |
| Dijkstra and A* | [140] | N | N | Y | ||
| Integer linear programming | [19] | N | N | N | ||
| Path diversification heuristic | [141] | N | N | Y | ||
| Feedback loop | [142] | Y | Multi-sensor | N | N | |
| Bid valuation and sampling-based approach | [20] | Y | Computational efficiency | N | Y | |
| Self-organizing map | [143] | Y | Computational efficiency | N | N | |
| Fuzzy programming | [144] | N | N | Y | ||
| Simultaneous inform and connect | [145] | Y | Computational efficiency | N | Y | |
| A* and cloud computing | [146] | Y | Computational efficiency | N | Y | |
| Software Defined Network and APF | [147] | Y | Wireless network | N | Y | |
| Decentralized | Space Utilization Optimization | [149] | N | N | N | |
| Conflict based search | [150] | N | N | N | ||
| Insertion | [151] | N | N | N | ||
| Roadmap | [152] | N | N | Y | ||
| Prioritized reinforcement learning | [22] | N | N | N | ||
| PSO | [3] | N | N | N | ||
| Free-ranging motion | [154] | N | N | N | ||
| A* | [155] | N | N | N | ||
| APF | [156] | Y | Computational efficiency | N | Y | |
| Hypocycloid | [157] | Y | Local communication | Y | N | |
| geometry | ||||||
| Linear program | [158] | Y | Computational efficiency | N | N | |
| Graph neural network | [159] | Y | Communications among robots | N | Y | |
| Graph Neural Network | [161] | Y | A key-query-like mechanism to communicate | N | Y | |
| Multi-agent reinforcement learning | [162] | Y | Computational efficiency | N | N | |
| Genetic Programming | [163] | Y | Computational efficiency | N | N | |
| Altruistic coordination | [164] | Y | Computational efficiency | N | N | |
| Potential field | [165] | Y | Robot communications | N | N | |
| APF | [166] | Y | Computational efficiency | N | N | |
| RRT and PRM | [167] | Y | Algorithms | N | Y | |
| A* | [153] | N | N | N | ||
| Markov Decision Process | [160] | Y | Computational efficiency | N | N |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, S.; Liu, A.; Wang, J.; Kong, X. A Review of Path-Planning Approaches for Multiple Mobile Robots. Machines 2022, 10, 773. https://doi.org/10.3390/machines10090773
Lin S, Liu A, Wang J, Kong X. A Review of Path-Planning Approaches for Multiple Mobile Robots. Machines. 2022; 10(9):773. https://doi.org/10.3390/machines10090773
Chicago/Turabian StyleLin, Shiwei, Ang Liu, Jianguo Wang, and Xiaoying Kong. 2022. "A Review of Path-Planning Approaches for Multiple Mobile Robots" Machines 10, no. 9: 773. https://doi.org/10.3390/machines10090773