

Research on Unbalanced Vibration Suppression Method for Coupled Cantilever Dual-Rotor System

Abstract
:
1. Introduction
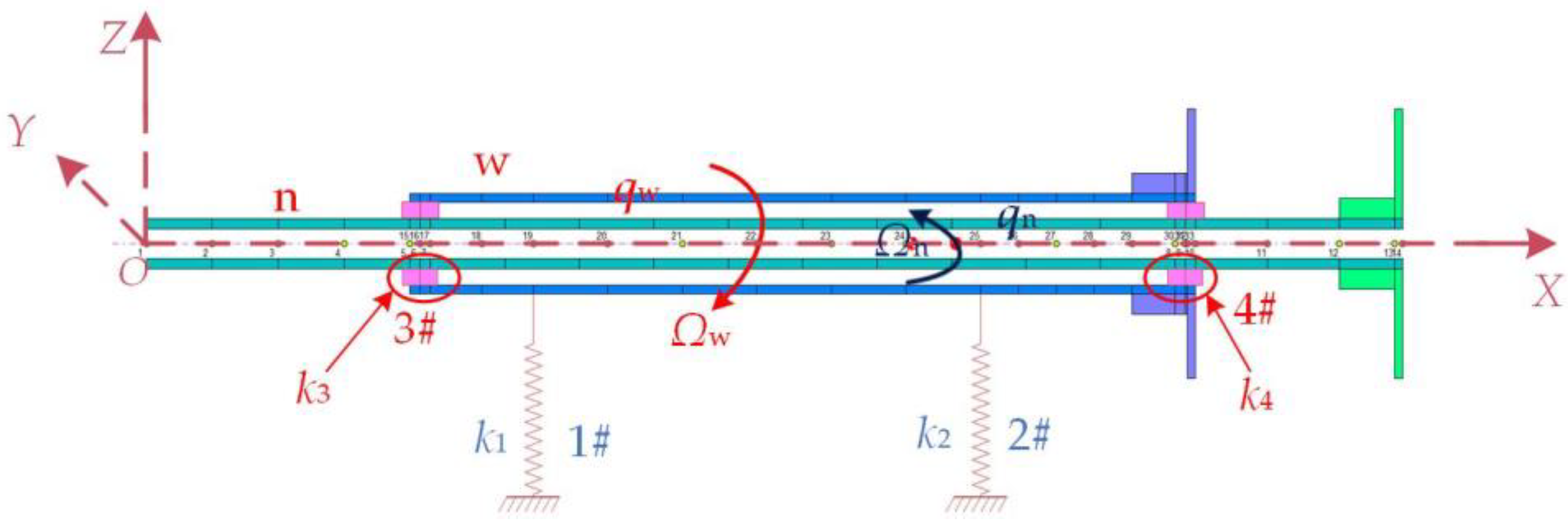
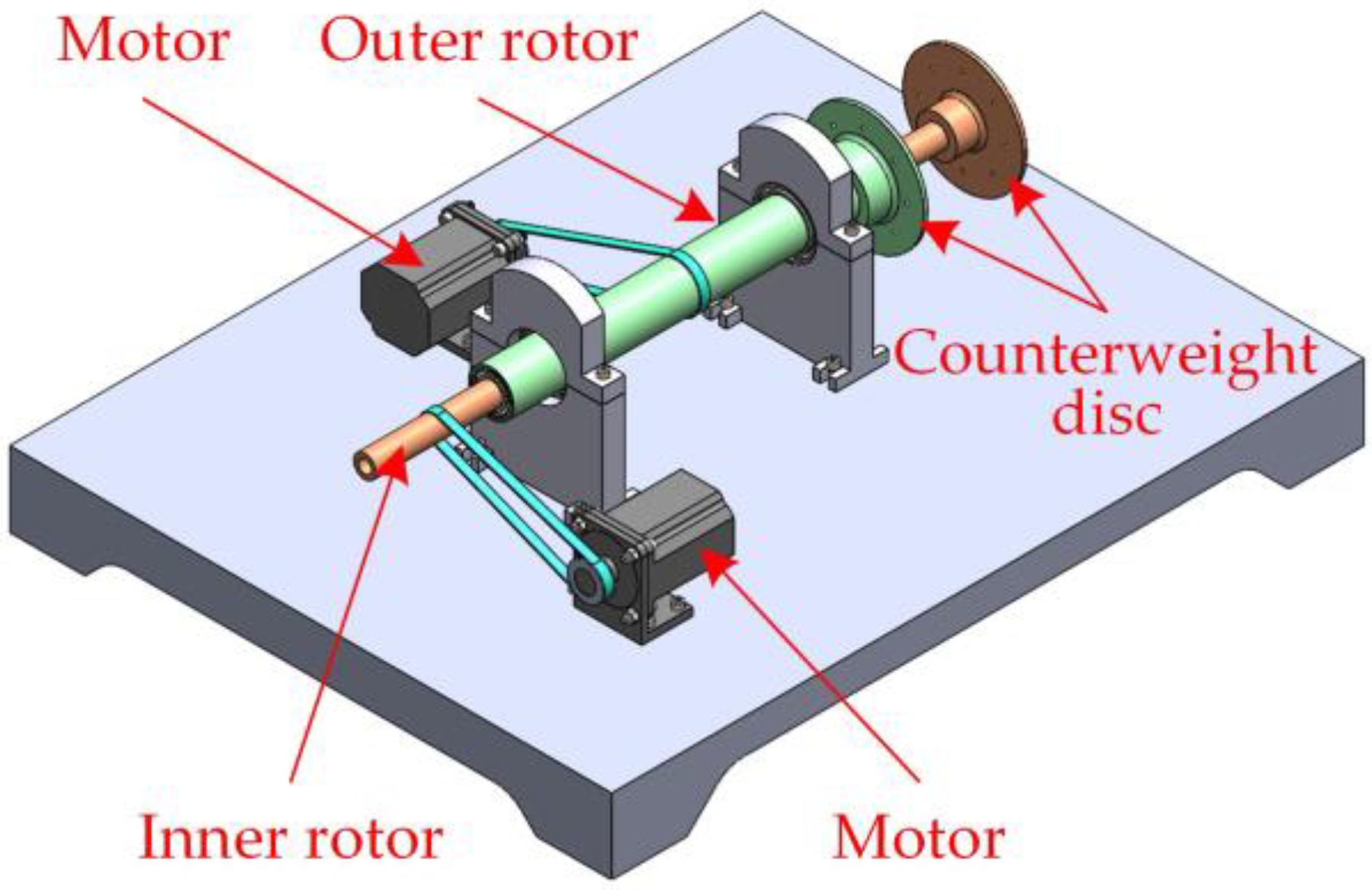
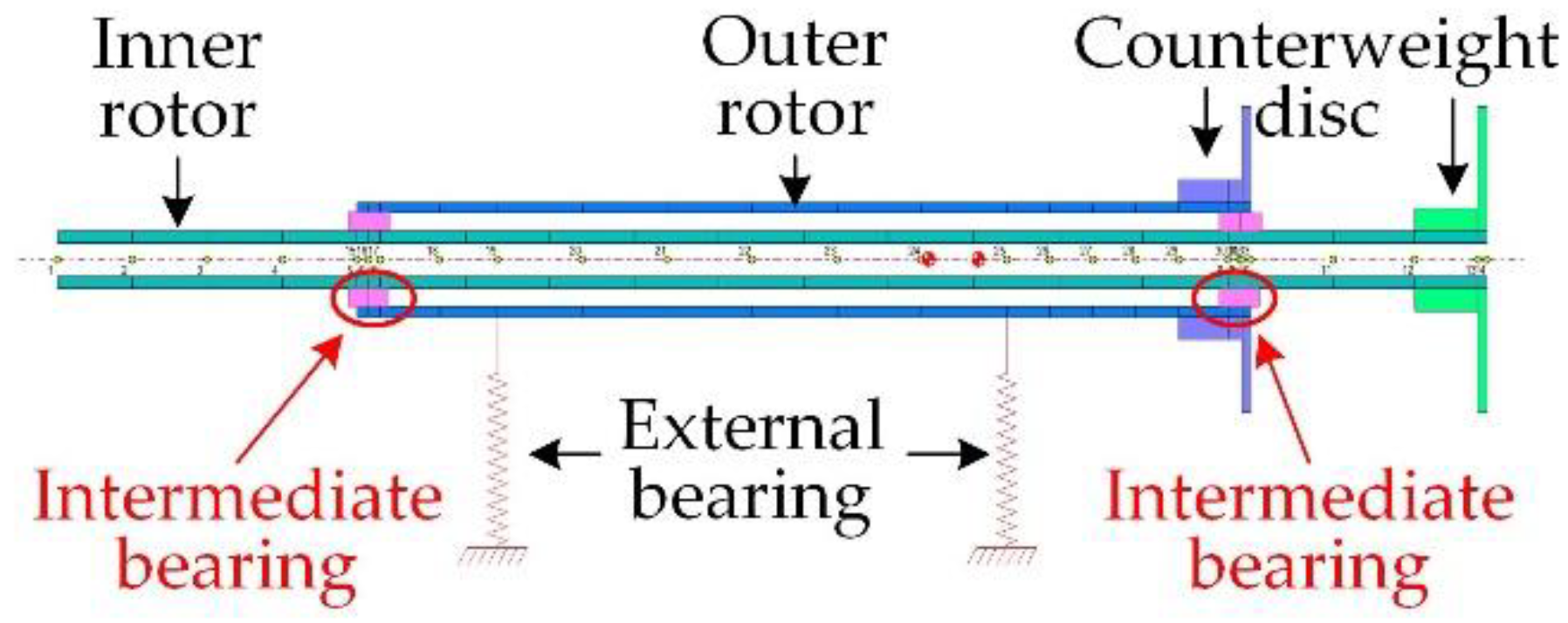
2. Structural Characteristics of the Cantilevered Coaxial Counter-Rotating Dual-Rotor System
3. Dynamic Characteristic Analysis of Dual-Rotor System
3.1. Equations of Motion for a Dual-Rotor System
3.2. Unbalanced Steady-State Response Analysis of a Dual-Rotor System
4. A New Online Automatic Balance Actuator Based on Ultrasonic Motor
4.1. Principle
4.2. Structural Design
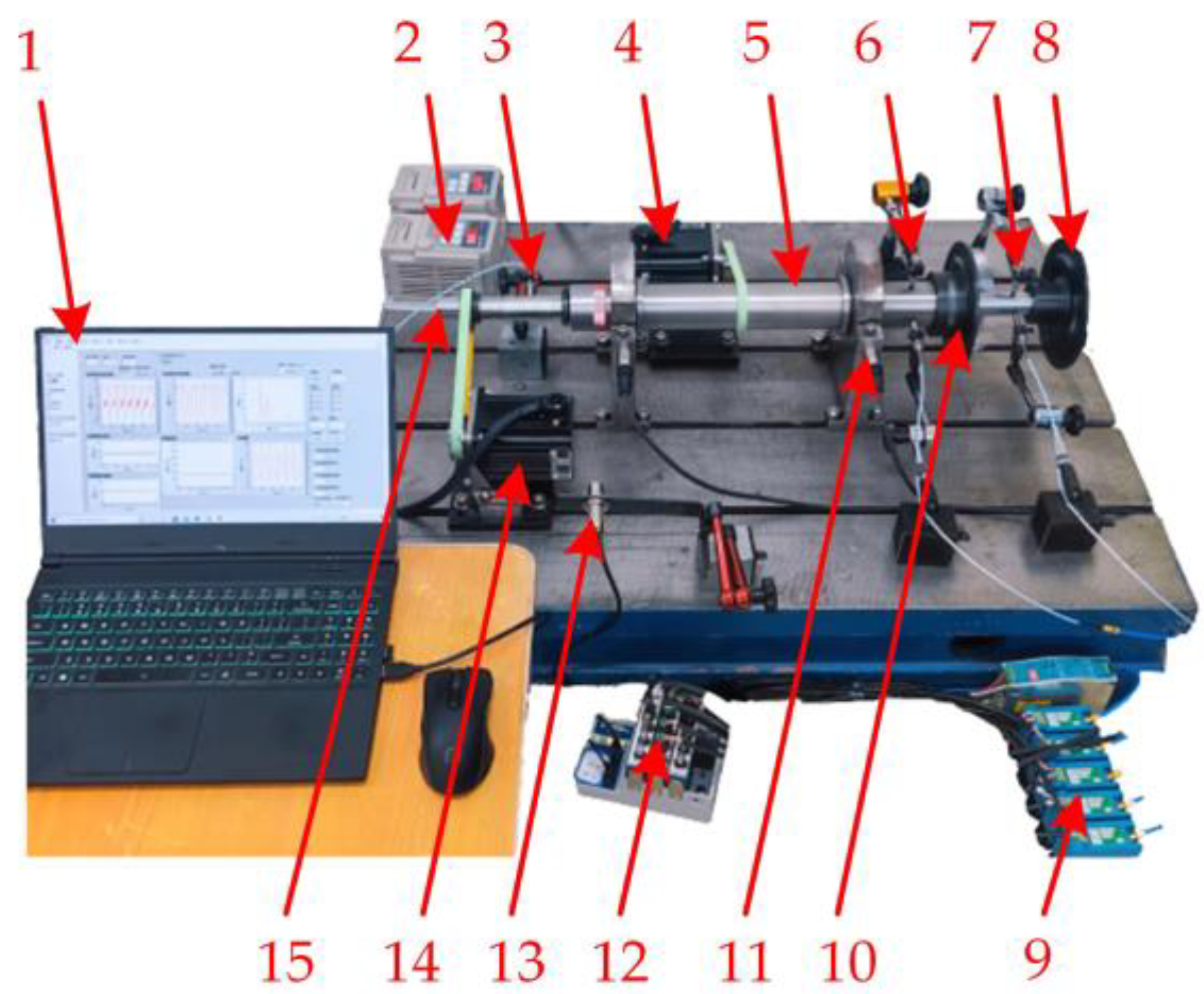
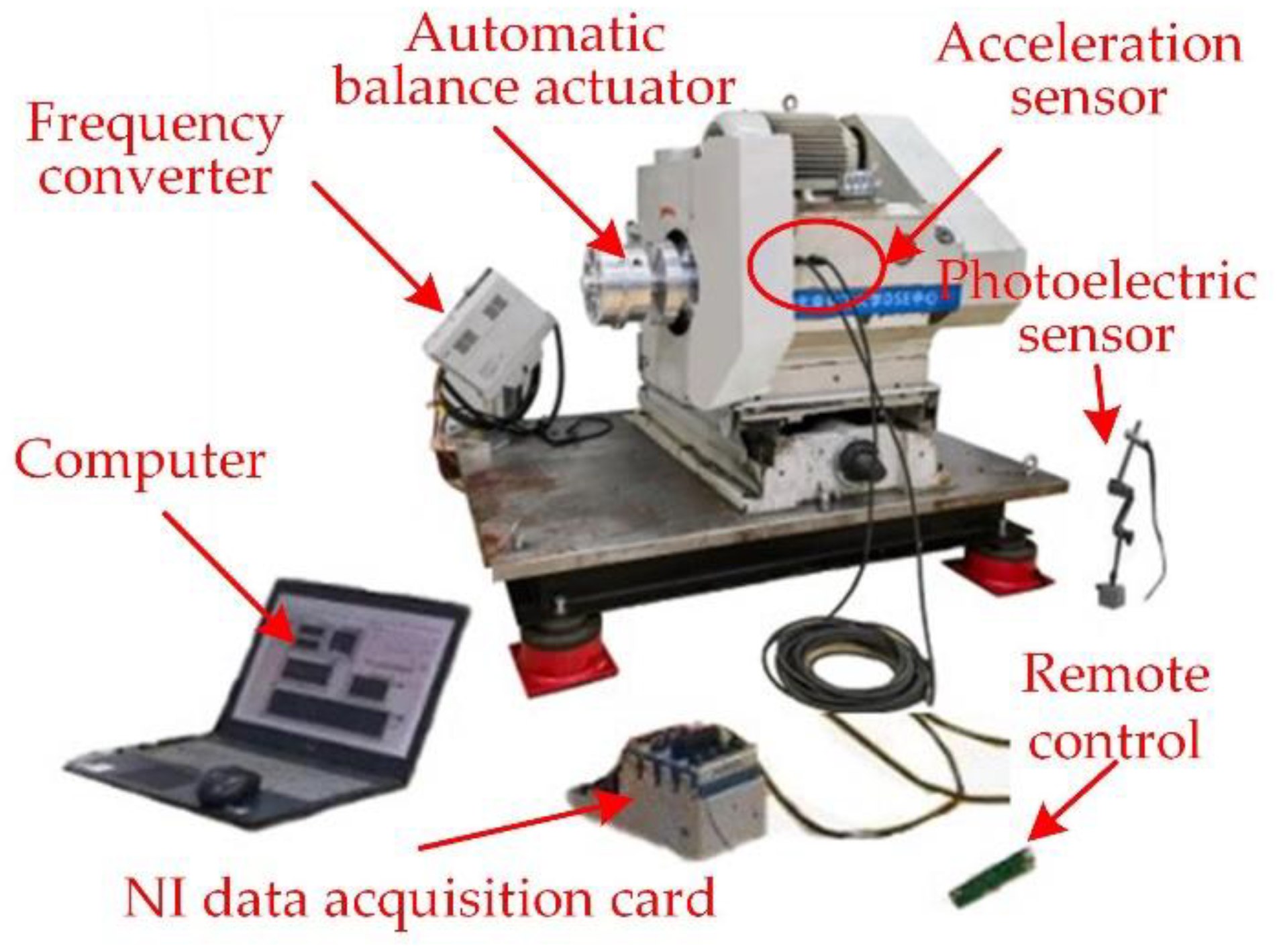
5. Experimental Verification
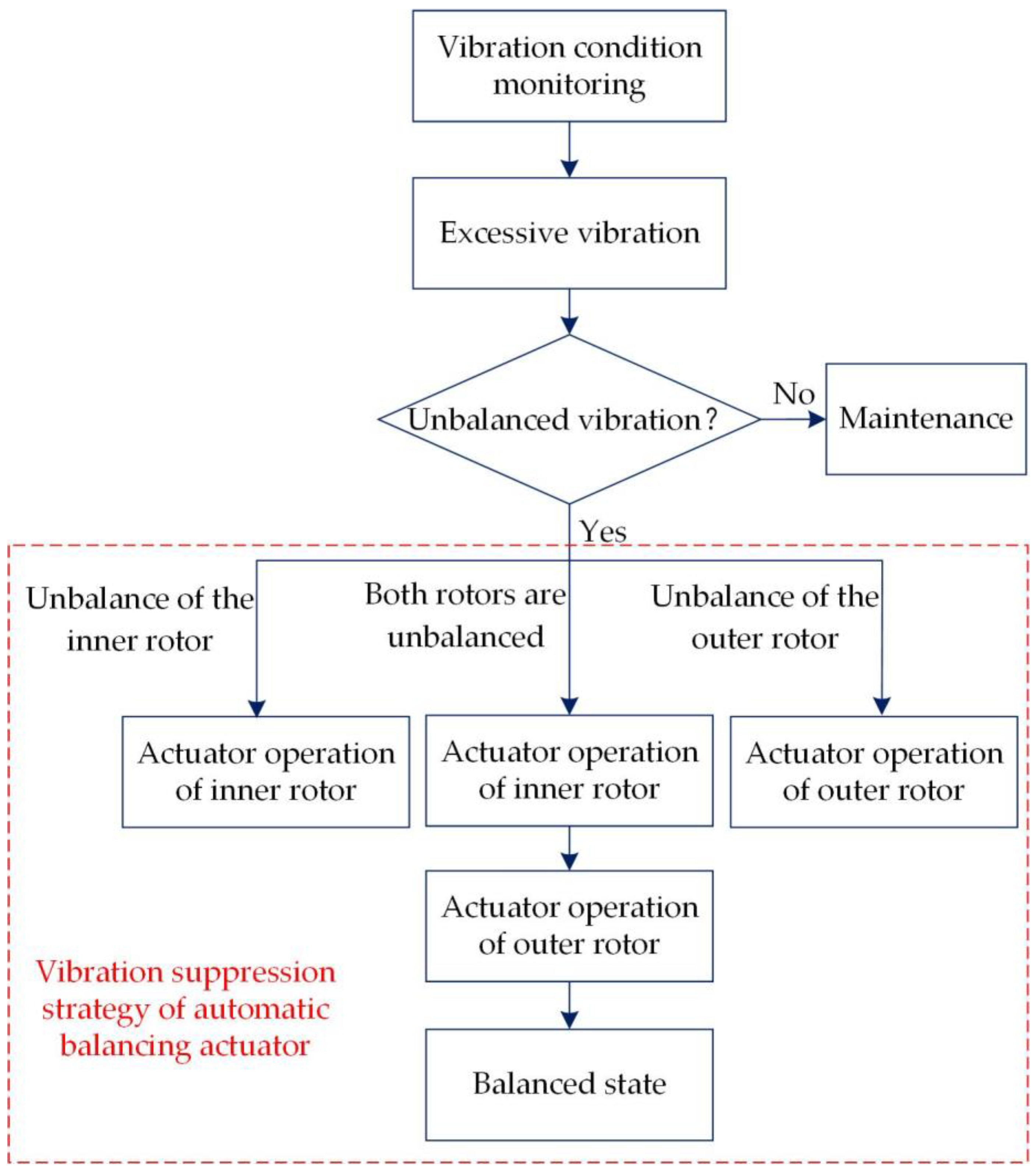
5.1. Unbalance Vibration Suppression Test Based on Self-Sensitivity Coefficient
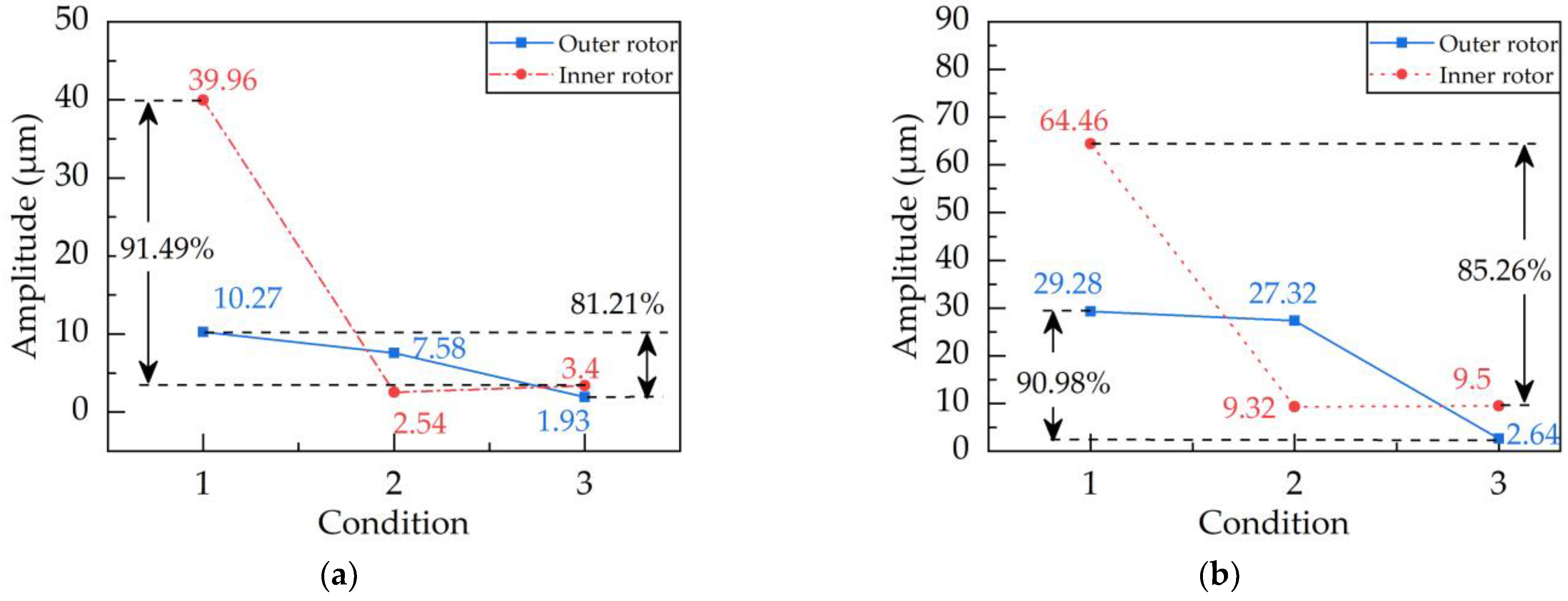
5.1.1. n = −1.5
5.1.2. n = −1.2
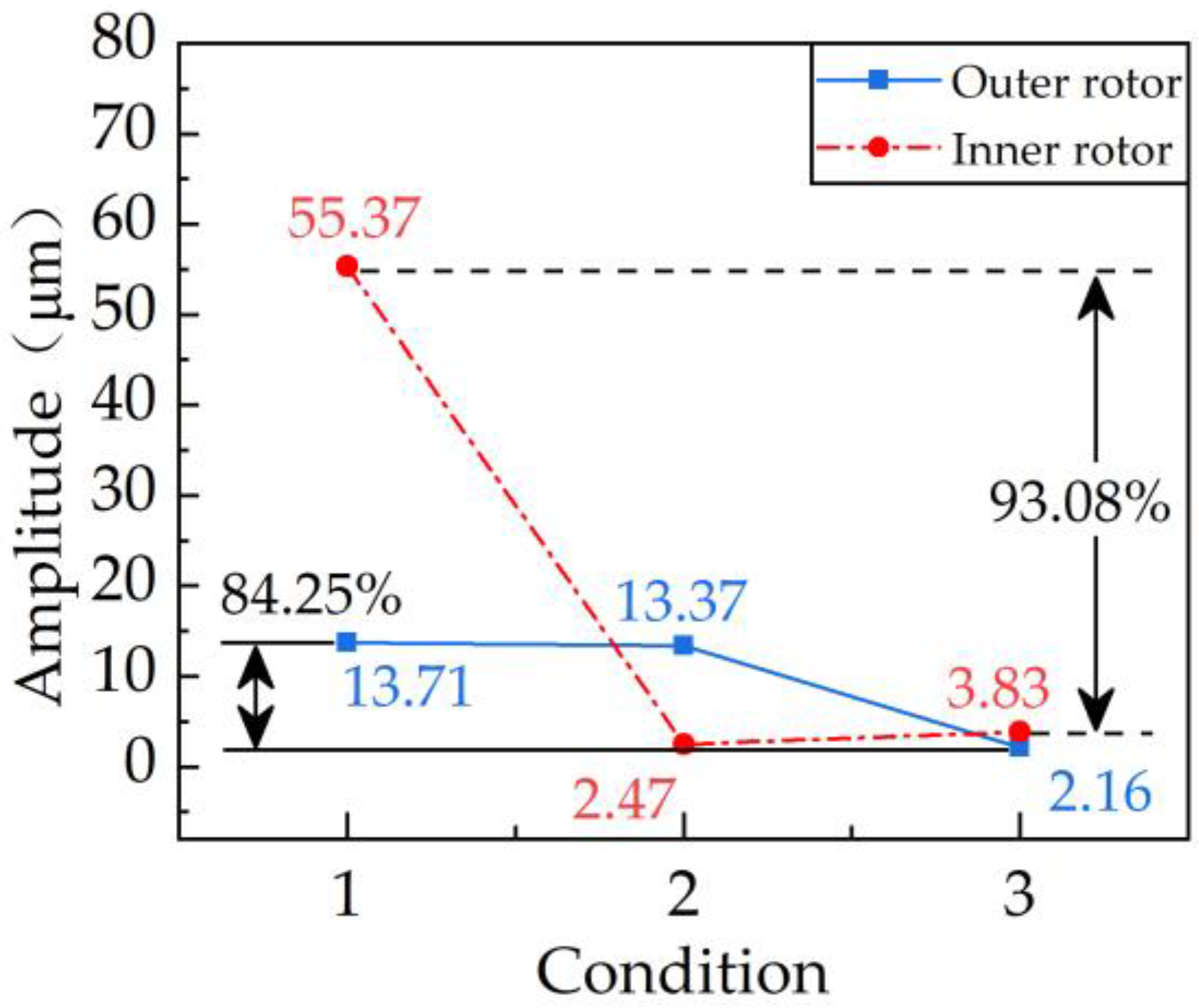
5.1.3. n = −1.04
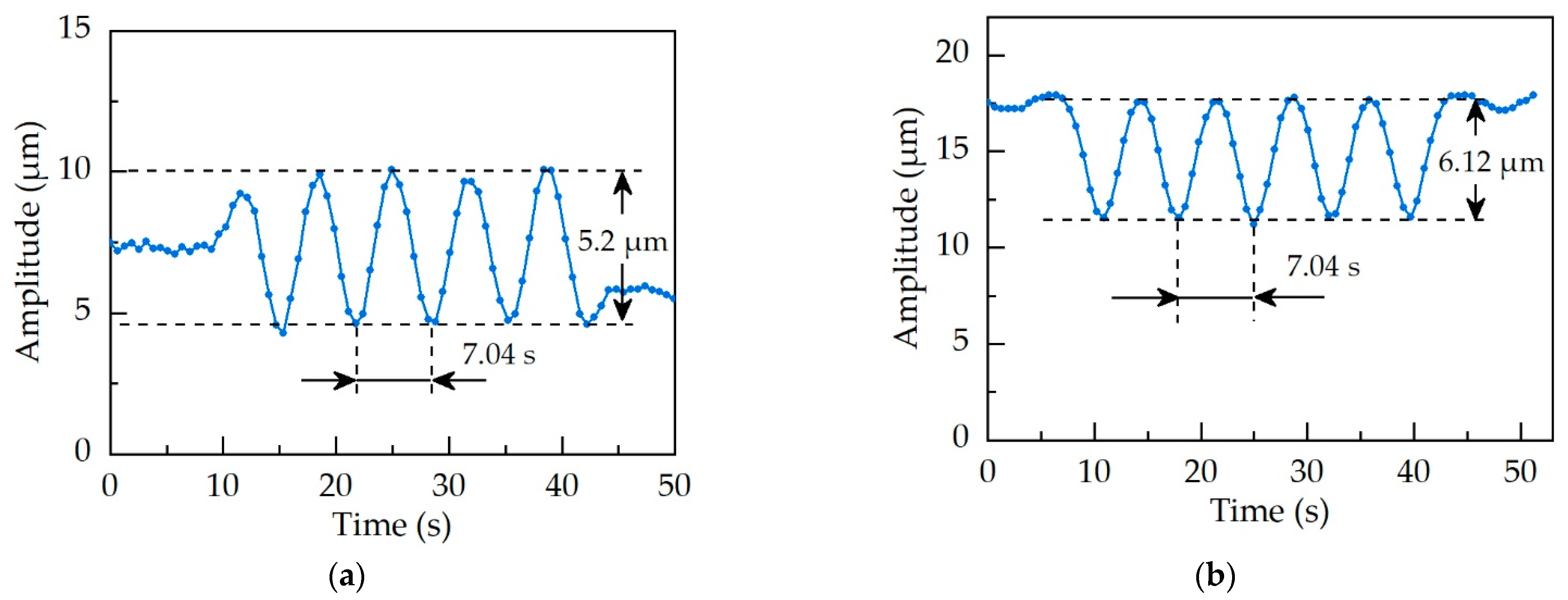
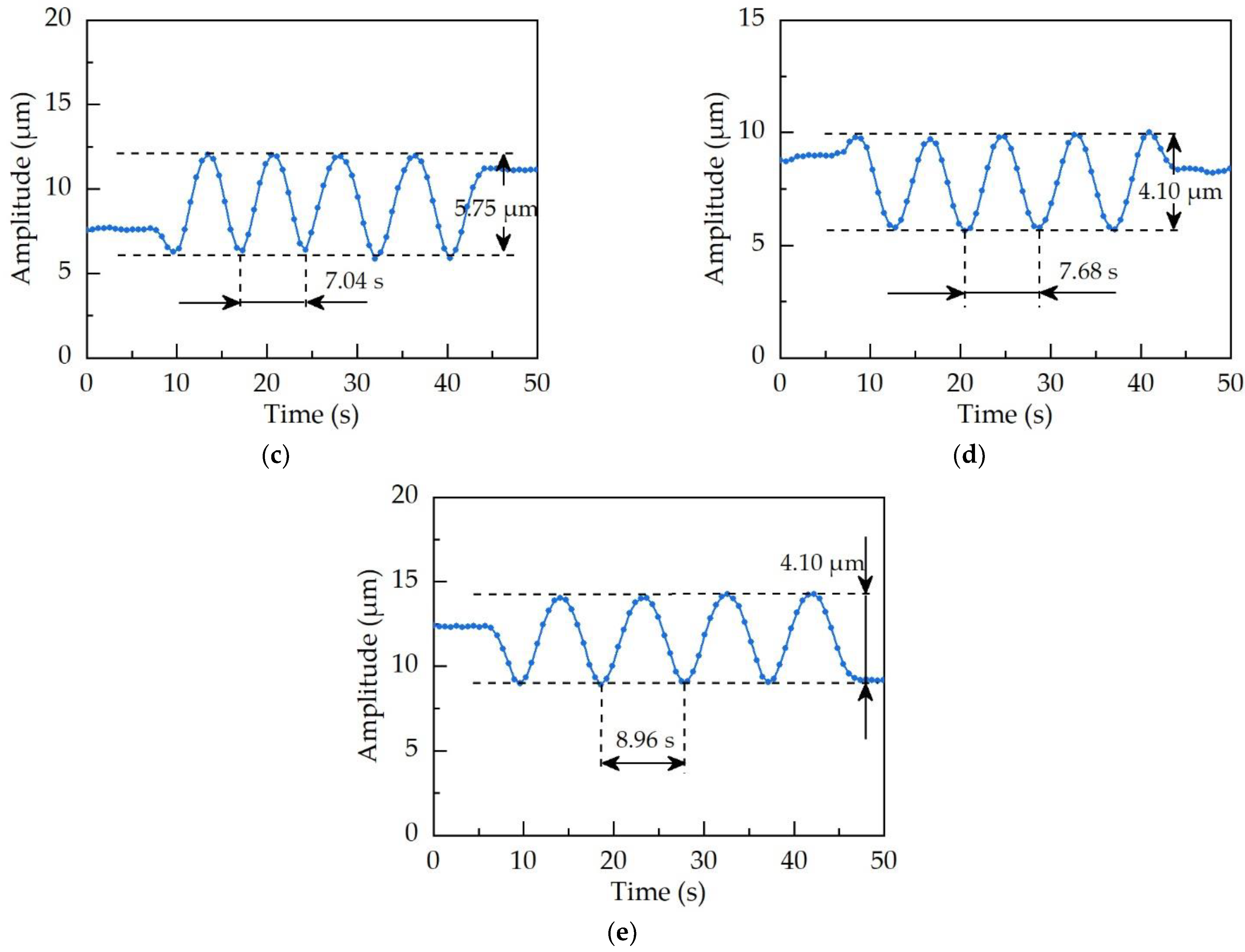
5.2. Feasibility Test Verification of the Balancing Actuator
6. Conclusions
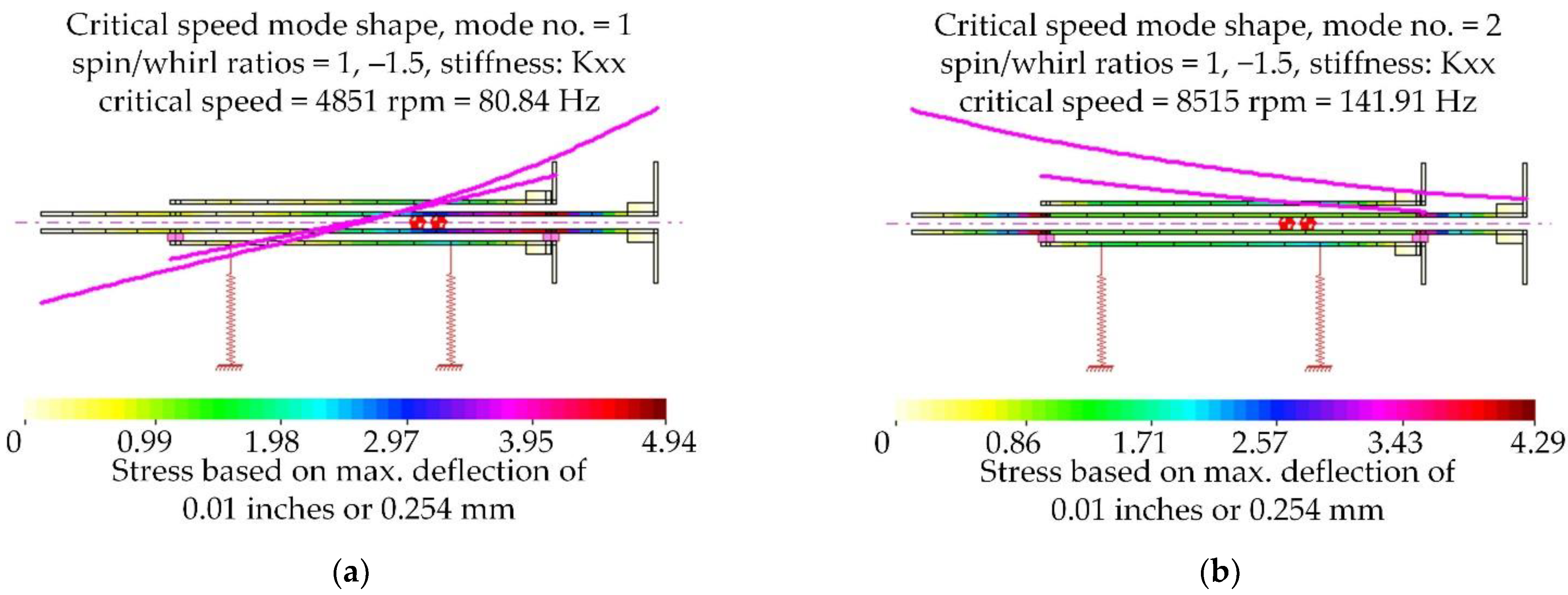
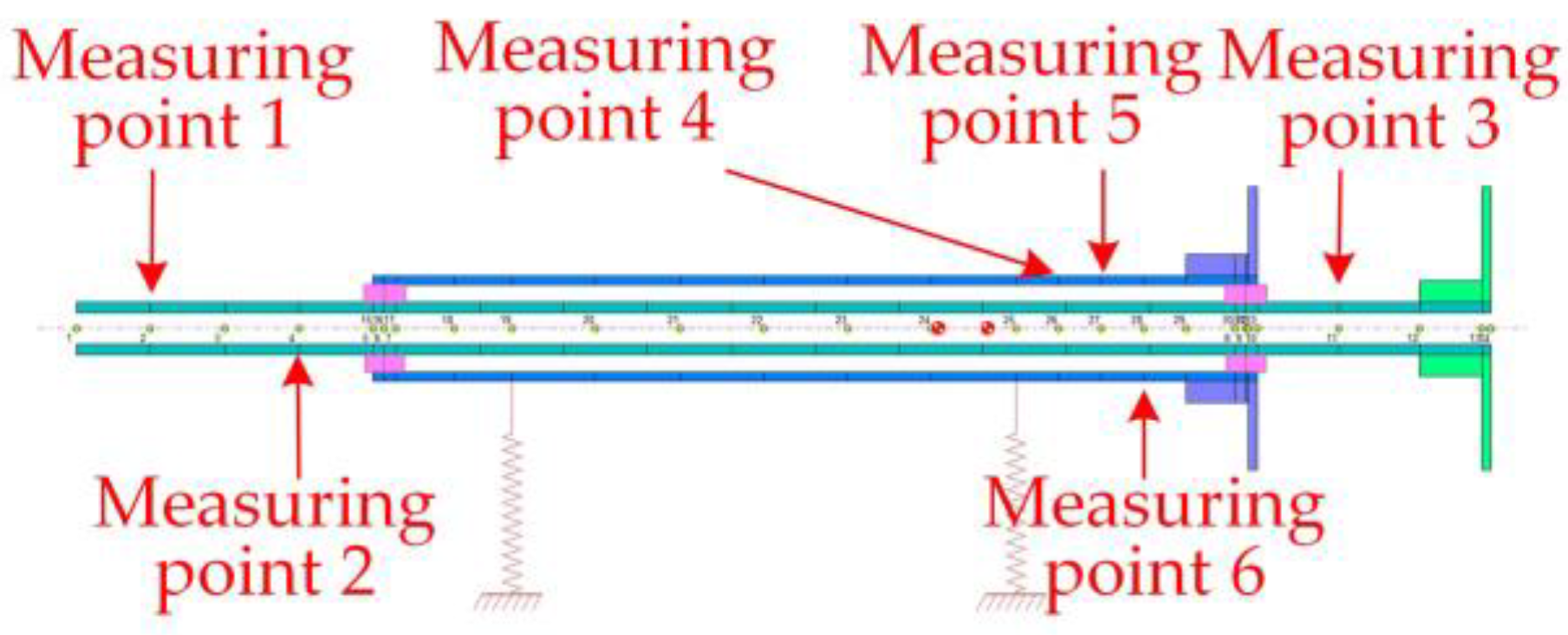
- The unbalance response analysis of the dual-rotor system under the condition of a –1.5 speed ratio was carried out by DyRoBeS software. The results showed that the law of vibration transmission on the rotor system applied: for rigid rotors, the closer to the vibration source, the more sensitive the vibration, that is, the more suitable for the layout of vibration measurement points;
- Based on the unbalance response analysis, the concept of self-sensitivity coefficient was established to describe the sensitivity of the measurement point to the vibration caused by the structure where the measurement point is located. The experimental results of unbalanced vibration suppression under three operating conditions of −1.5, −1.2, and −1.04 speed ratios showed that the self-sensitivity coefficient could be used as a theoretical basis for the actual vibration measurement point arrangement and unbalanced vibration suppression strategy of the dual-rotor system.
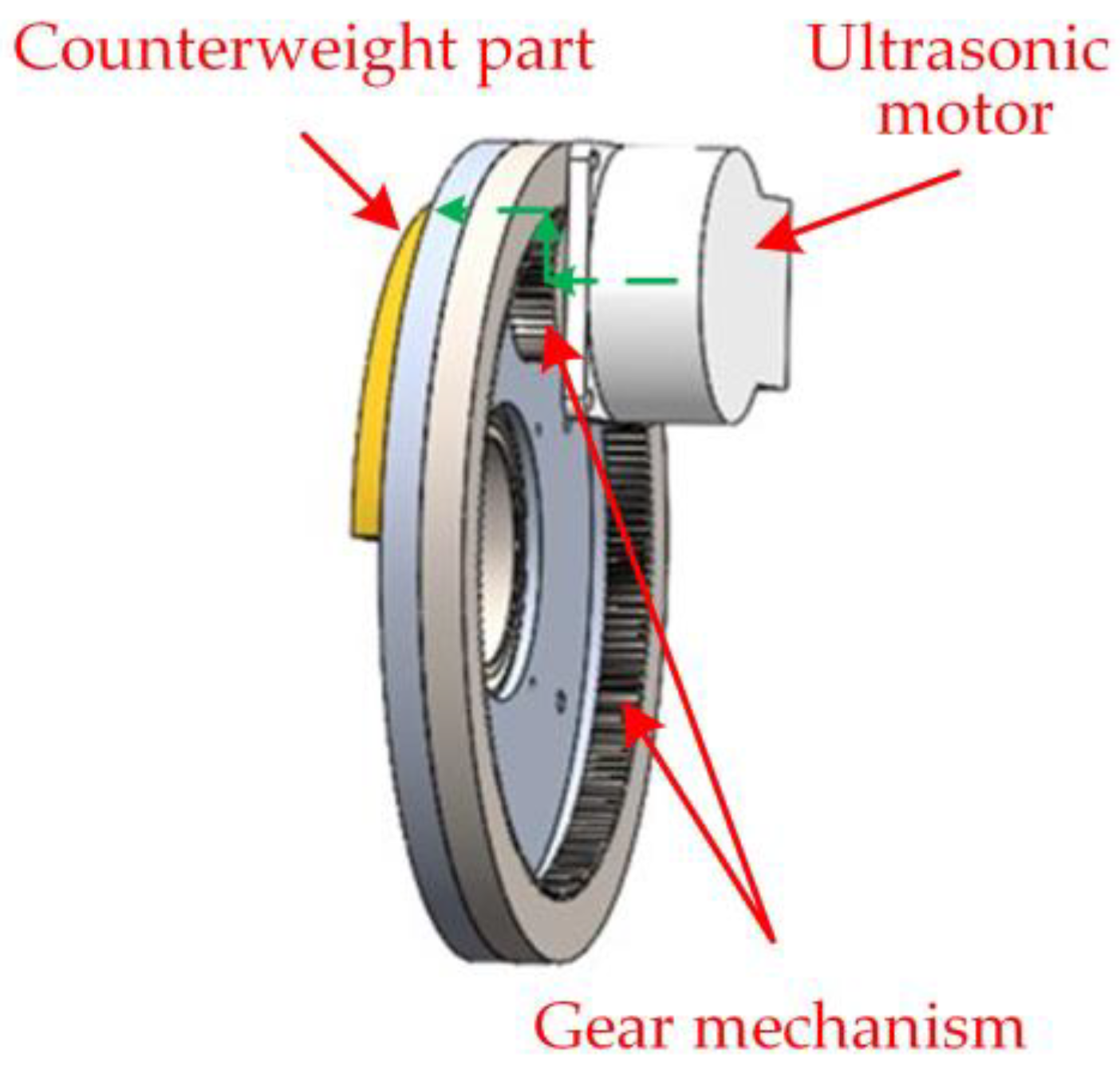
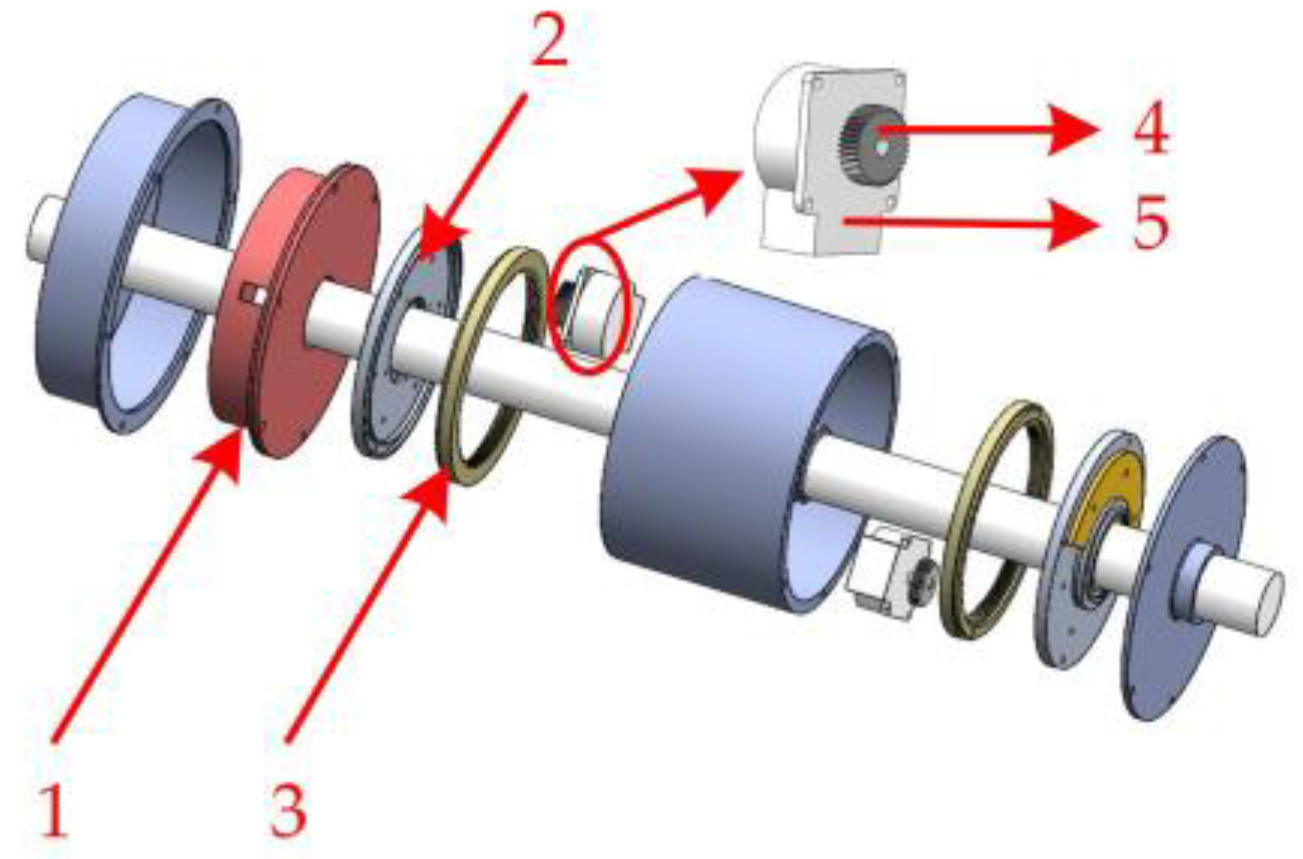
- An automatic balance actuator suitable for a dual-rotor structure at the output end of open rotor engines and coaxial output turboshaft engines was designed and analyzed on a rotor test bench for feasibility. The results showed that the vibration of the balanced rotor could be reduced by more than 34% in 5 s under different test speeds by using the balancing actuator. It was further demonstrated that the actuator had a fast response, satisfying self-locking requirements, and a stable operation. Ultimately, the actuator could quickly suppress the vibration within the range of balance capability.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, L.; Cao, S.; Li, J.; Nie, R.; Hou, L. Review of Rotor Balancing Methods. Machines 2021, 9, 89. [Google Scholar] [CrossRef]
- Pan, X.; Lu, J.Q.; Huo, J.J.; Gao, J.J.; Wu, H.Q. A Review on Self-Recovery Regulation (SR) Technique for Unbalance Vibration of High-End Equipment. Chin. J. Mech. Eng. 2020, 33, 89. [Google Scholar] [CrossRef]
- Wang, N.F.; Jiang, D.X. Vibration response characteristics of a dual-rotor with unbalance-misalignment coupling faults: Theoretical analysis and experimental study. Mech. Mach. Theory 2018, 125, 207–219. [Google Scholar] [CrossRef]
- Ma, P.; Zhai, J.; Wang, Z.; Zhang, H.; Han, Q.K. Unbalance Vibration Characteristics and Sensitivity Analysis of the Dual-Rotor System in Aeroengines. J. Aerospace Eng. 2021, 34, 04020094. [Google Scholar] [CrossRef]
- Ma, Y.; Shi, C.; Sun, B.; Hong, J. Method of Coupled Vibration Control for Dual Rotor System With Inter-Shaft Bearing. In Proceedings of the ASME Turbo Expo 2021: Turbomachinery Technical Conference and Exposition, 7–11 June 2021. [Google Scholar]
- Ma, X.; Ma, H.; Qin, H.; Guo, X.; Zhao, C.; Yu, M. Nonlinear vibration response characteristics of a dual-rotor-bearing system with squeeze film damper. Chin. J. Aeronaut. 2021, 34, 128–147. [Google Scholar] [CrossRef]
- Lu, Z.Y.; Wang, X.D.; Hou, L.; Chen, Y.S.; Liu, X.Y. Nonlinear response analysis for an aero engine dual-rotor system coupled by the inter-shaft bearing. Arch. Appl. Mech. 2019, 89, 1275–1288. [Google Scholar] [CrossRef]
- Lu, Z.Y.; Zhong, S.; Chen, H.Z.; Wang, X.D.; Han, J.J.; Wang, C. Nonlinear response analysis for a dual-rotor system supported by ball bearing. Int. J. Non-Linear Mech. 2021, 128, 103627. [Google Scholar] [CrossRef]
- Han, J.; Luo, G.; Chen, W.; Wang, F.; Liu, L.; Zhao, Z.; Luo, G. Coupling Vibration Analysis of Turbine Shared Support Rotor-Bearing System with Squeeze Film Dampers. Int. J. Aerosp. Eng. 2022, 2022, 8425735. [Google Scholar] [CrossRef]
- Ibn Shamsah, S.M.; Sinha, J.K. Rotor Unbalance Estimation with Reduced Number of Sensors. Machines 2016, 4, 19. [Google Scholar] [CrossRef]
- Chen, Y.; Cui, J.; Sun, X. A Vibration Suppression Method for the Multistage Rotor of an Aero-Engine Based on Assembly Optimization. Machines 2021, 9, 189. [Google Scholar] [CrossRef]
- Ponci, L.P.; Creci, G.; Menezes, J.C. Simplified procedure for vibration analysis and dynamic balancing in mechanical systems with beats frequency. Measurement 2021, 174, 109056. [Google Scholar] [CrossRef]
- Zhang, Z.X.; Wang, L.Z.; Jin, Z.J.; Zhang, Q.; Li, X.L. Non-whole beat correlation method for the identification of an unbalance response of a dual-rotor system with a slight rotating speed difference. Mech. Syst. Signal Process. 2013, 39, 452–460. [Google Scholar] [CrossRef]
- Zhang, Z.X.; Zhang, Q.; Li, X.L.; Qian, T.L. The whole-beat correlation method for the identification of an unbalance response of a dual-rotor system with a slight rotating speed difference. Mech. Syst. Signal Process. 2011, 25, 1667–1673. [Google Scholar] [CrossRef]
- Fang, J.; Xu, X.; Xie, J. Active vibration control of rotor imbalance in active magnetic bearing systems. J. Vib. Control. 2013, 21, 684–700. [Google Scholar] [CrossRef]
- Gong, L.; Zhu, C. Synchronous Vibration Control for Magnetically Suspended Rotor System Using a Variable Angle Compensation Algorithm. IEEE Trans. Ind. Electron. 2021, 68, 6547–6559. [Google Scholar] [CrossRef]
- Fan, H.W.; Jing, M.Q.; Wang, R.C.; Liu, H.; Zhi, J.J. New electromagnetic ring balancer for active imbalance compensation of rotating machinery. J. Sound Vib. 2014, 333, 3837–3858. [Google Scholar] [CrossRef]
- Pan, X.; He, X.; Wu, H.; Ju, C.; Jiang, Z.; Gao, J. Optimal Design of Novel Electromagnetic-Ring Active Balancing Actuator with Radial Excitation. Chin. J. Mech. Eng. 2021, 34, 9. [Google Scholar] [CrossRef]
- Pan, X.; Xie, Z.; Lu, J.; Wu, H.; Gao, J.; Jiang, Z. Novel Liquid Transfer Active Balancing System for Hollow Rotors of High-Speed Rotating Machinery. Appl. Sci. 2019, 9, 833. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, X.; Zhao, H. New Active Online Balancing Method for Grinding Wheel Using Liquid Injection and Free Dripping. J. Vib. Acoust.-Trans. ASME 2018, 140. [Google Scholar] [CrossRef]
- EQuiroz-Hernandez, E. Method for Balancing a Propulsive System Having Non-Hull Contral-Rotating Propellers. US 8998580 B2, 7 April 2015. [Google Scholar]
- Augustin Curlier, T.B.; Gilles Alain Charier. Epicyclic Reduction Gear with Fluid Transfer Pipes, and Propeller Turbomachine for an Aircraft with Such a Reduction Gear. US 10006539 B2, 26 June 2018. [Google Scholar]
- Pope, A.N. Thrust Force-Compensating Apparatus with Improved Hydraulic Pressure-Responsive Balance Mechanism. US 5102295 A, 7 April 1992. [Google Scholar]
- Richard, G.; Stretton, N.H. Propfan Engine. US 8967967 B2, 3 March 2015. [Google Scholar]
- Alekseevich, K.V. Gas Turbine Engine With Double-Row Propeller Fan. RU2428577C1, 10 September 2011. [Google Scholar]
- Chen, W.J. Introduction to Dynamics of Rotor-Bearing Systems; Trafford Publishing: Bloomington, IN, USA, 2007. [Google Scholar]
- Vance, J.; Zeidan, F.; Murphy, B. Machinery Vibration and Rotordynamics; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2010. [Google Scholar]
- Chen, X.; Liao, M. Steady-State Characteristics of a Dual-Rotor System With Intershaft Bearing Subjected to Mass Unbalance and Base Motions. In Proceedings of the ASME Turbo Expo 2018: Turbomachinery Technical Conference and Exposition, Oslo, Norway, 11–15 June 2018. [Google Scholar]
- Vande Vegte, J. Continuous Automatic Balancing of Rotating Systems. J. Mech. Eng. Sci. 1964, 6, 264–269. [Google Scholar] [CrossRef]
- Van de Vegte, J.; Lake, R.T. Balancing of rotating systems during operation. J. Sound Vib. 1978, 57, 225–235. [Google Scholar] [CrossRef]
- Kim, Y.D.; Lee, C.W. Determination of the Optimal Balancing Head Location on Flexible Rotors Using a structural Dynamics Modification Algorithm. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 1985, 199, 19–25. [Google Scholar] [CrossRef]
- Marposs. Flange and Spindle Type Balancing Heads Guiding Line. Available online: https://www.marposs.com/chi/product/flange-and-spindle-type-balancing-heads (accessed on 5 August 2022).
- Schmitt. Operation and Specification Manual for the SBS Dynamic Balance System: Model 4500 Series Control Unit. Available online: https://accretechsbs.com/product/1-external-balancers/ (accessed on 5 August 2022).
- Li, C.; Lu, C.; Ma, Y.; Li, S.; Huang, W. Design of an ultrasonic motor with multi-vibrators. J. Zhejiang Univ.-Sci. A 2016, 17, 724–732. [Google Scholar] [CrossRef]
- Li, X.; Wen, Z.; Jia, B.; Cao, T.; Yu, D.; Wu, D. A Review of Application and Development Trends in Ultrasonic Motors. ES Mater. Manuf. 2021, 12, 3–16. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
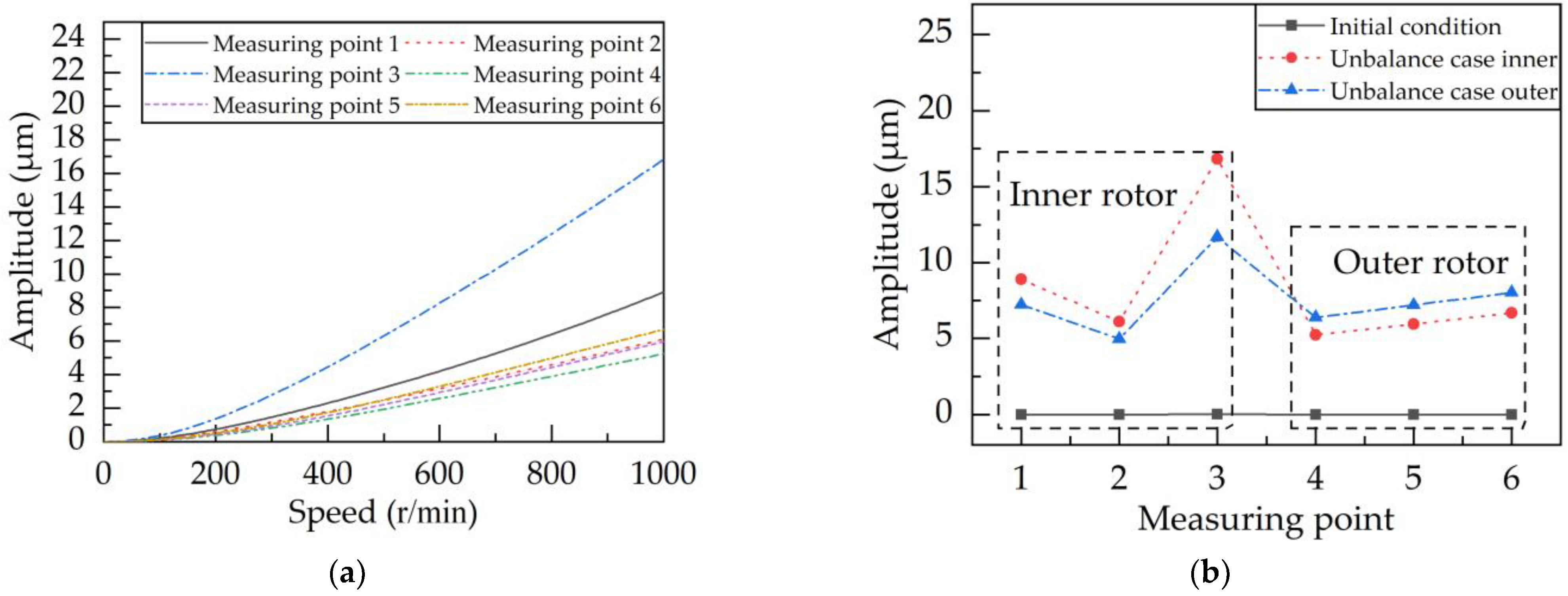
| Measuring Point | Amplitude/μm | ||
|---|---|---|---|
| Initial Condition | Unbalance Case Inner | Unbalance Case Outer | |
| 1 | 0.003 | 8.902 | 7.231 |
| 2 | 0.002 | 6.100 | 4.956 |
| 3 | 0.006 | 16.824 | 11.708 |
| 4 | 0.002 | 5.235 | 6.371 |
| 5 | 0.003 | 5.951 | 7.192 |
| 6 | 0.003 | 6.684 | 8.049 |
| Measuring Point | Self-Sensitivity Coefficient | |
|---|---|---|
| Inner rotor | 1 | 55.2% |
| 2 | 55.2% | |
| 3 | 59.0% | |
| Outer rotor | 4 | 54.9% |
| 5 | 54.7% | |
| 6 | 54.6% | |
| Rotor | The Unbalance Mass/g | ||
|---|---|---|---|
| n = −1.5 | n = −1.2 | n = −1.04 | |
| Inner rotor | 44.9 | 45 | 54.6 |
| Outer rotor | 45.2 | 89.6 | 54.8 |
| Rotor | Theoretical Counterweight /g° | Actual Counterweight /g° |
|---|---|---|
| Inner rotor | 22.39 ∠ 75.86 | 4.0 ∠ 0 + 20.4 ∠ 90 |
| Outer rotor | 43.72 ∠ 96.97 | 43.4 ∠ 90 + 5.3 ∠ 180 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, J.; Zhang, X.; Pan, X.; Zhang, M. Research on Unbalanced Vibration Suppression Method for Coupled Cantilever Dual-Rotor System. Machines 2022, 10, 758. https://doi.org/10.3390/machines10090758
Lu J, Zhang X, Pan X, Zhang M. Research on Unbalanced Vibration Suppression Method for Coupled Cantilever Dual-Rotor System. Machines. 2022; 10(9):758. https://doi.org/10.3390/machines10090758
Chicago/Turabian StyleLu, Jiaqiao, Xin Zhang, Xin Pan, and Meng Zhang. 2022. "Research on Unbalanced Vibration Suppression Method for Coupled Cantilever Dual-Rotor System" Machines 10, no. 9: 758. https://doi.org/10.3390/machines10090758