
Fuel Consumption Comparison between Hydraulic Mechanical Continuously Variable Transmission and Stepped Automatic Transmission Based on the Economic Control Strategy

Abstract
:1. Introduction
2. A Novel 5-Stage HMCVT
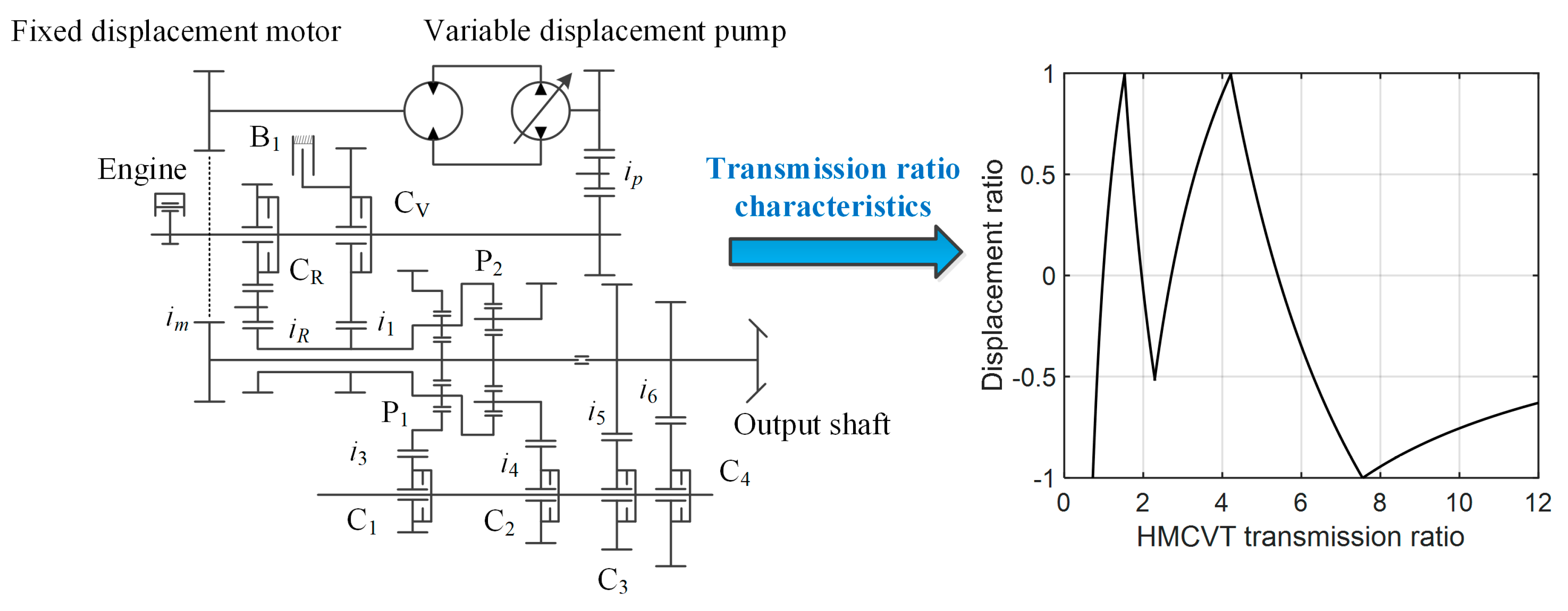
2.1. The Working Principle of HMCVT
2.2. Transmission Ratio Variation Characteristics of HMCVT
2.3. HMCVT Efficiency Characteristics
3. Formulation of Transmission Ratio Control Strategy
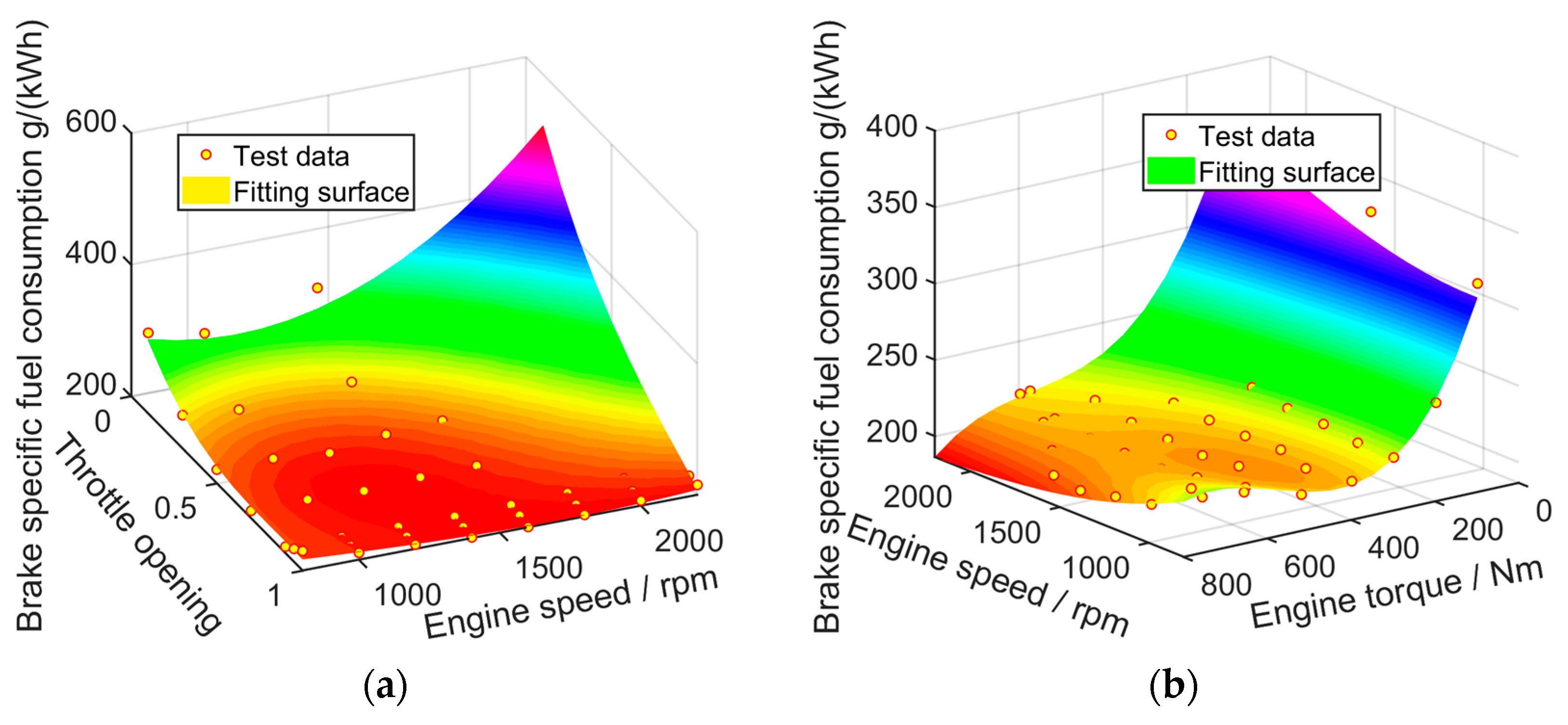
3.1. Engine Model
3.2. Transmission System Model
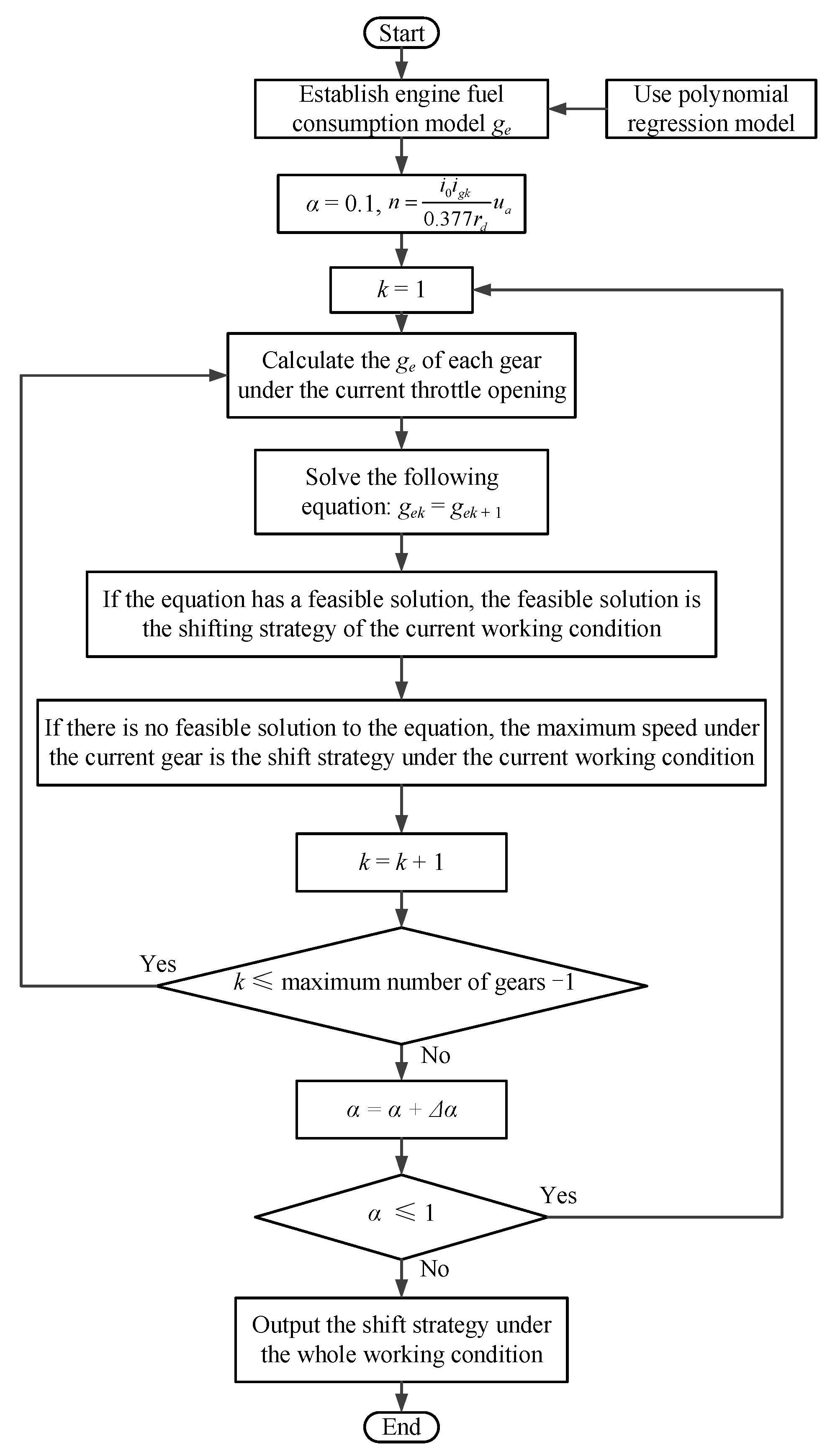
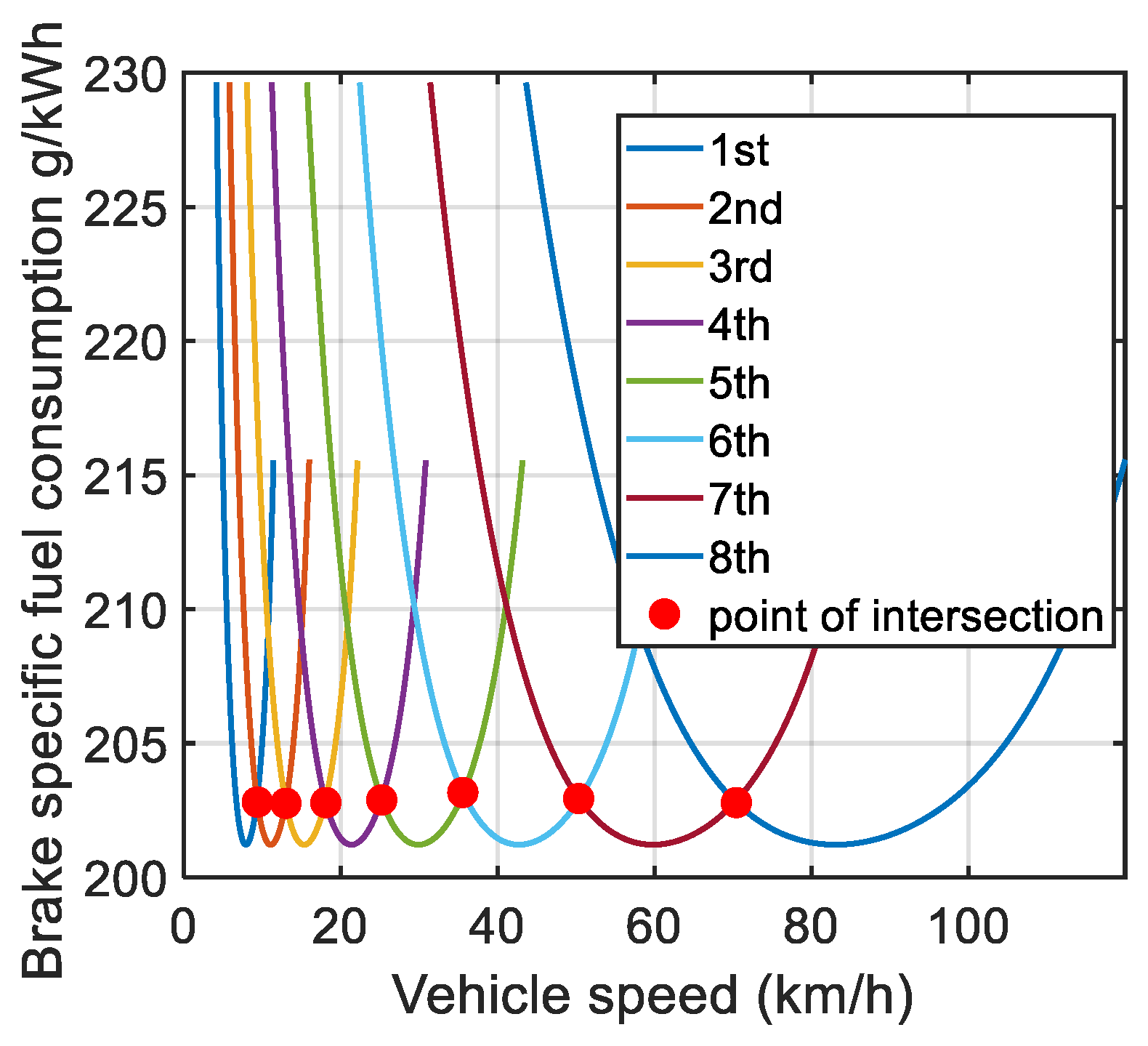
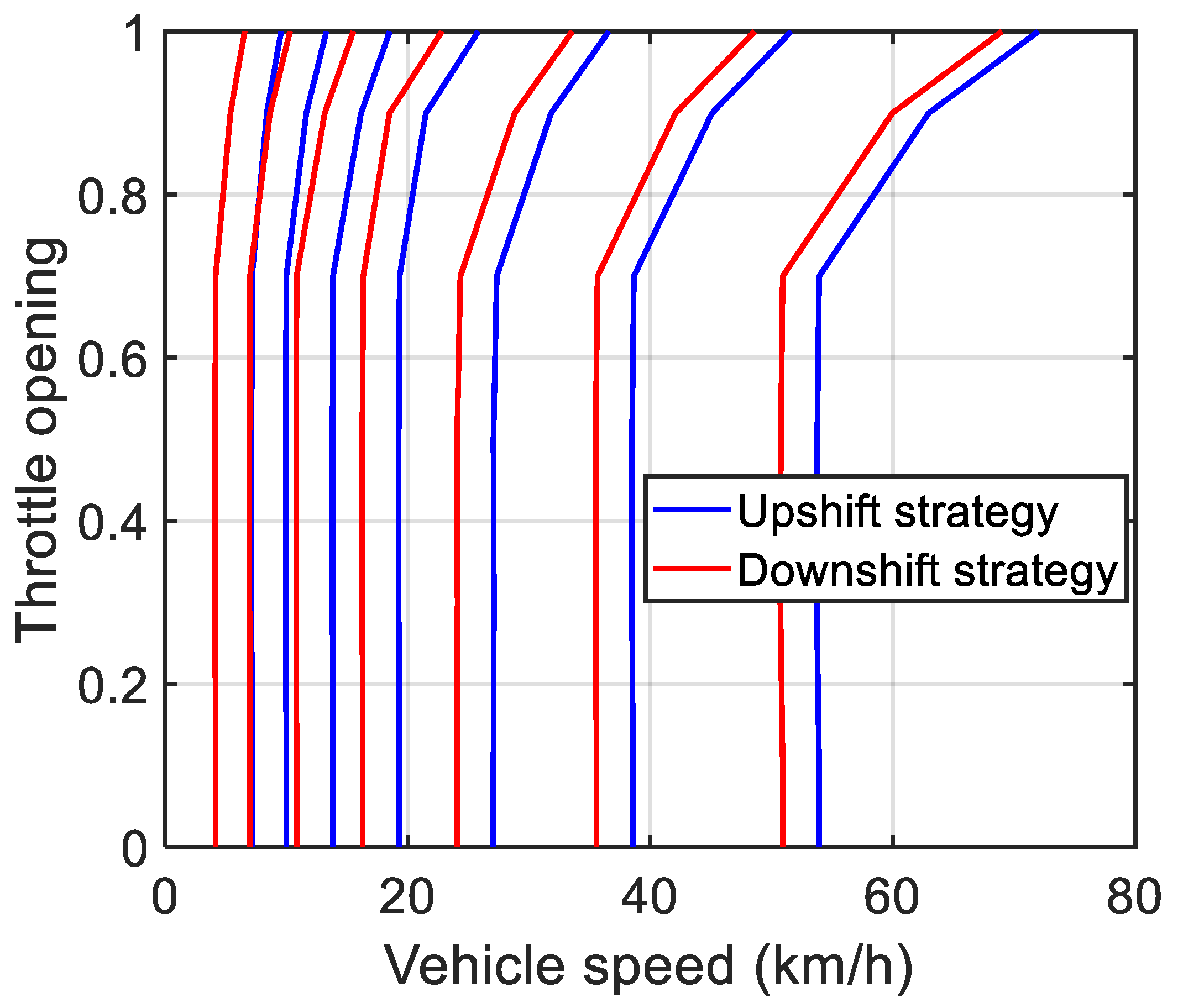
3.3. Economical Optimal Transmission Ratio Control Strategy of SAT
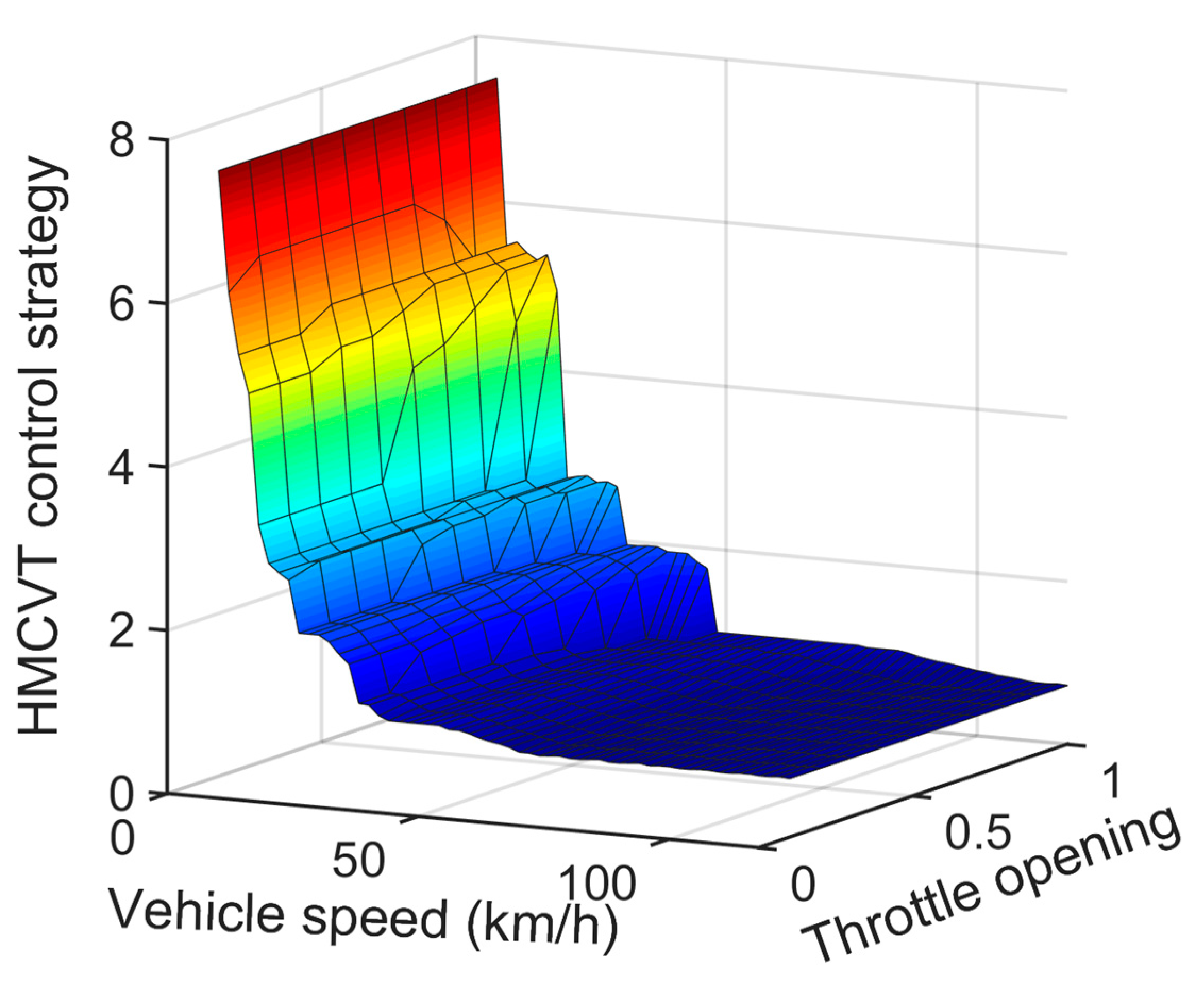
3.4. Economic Optimal Transmission Ratio Control Strategy of HMCVT
4. Establishment of a Simulation Test Platform
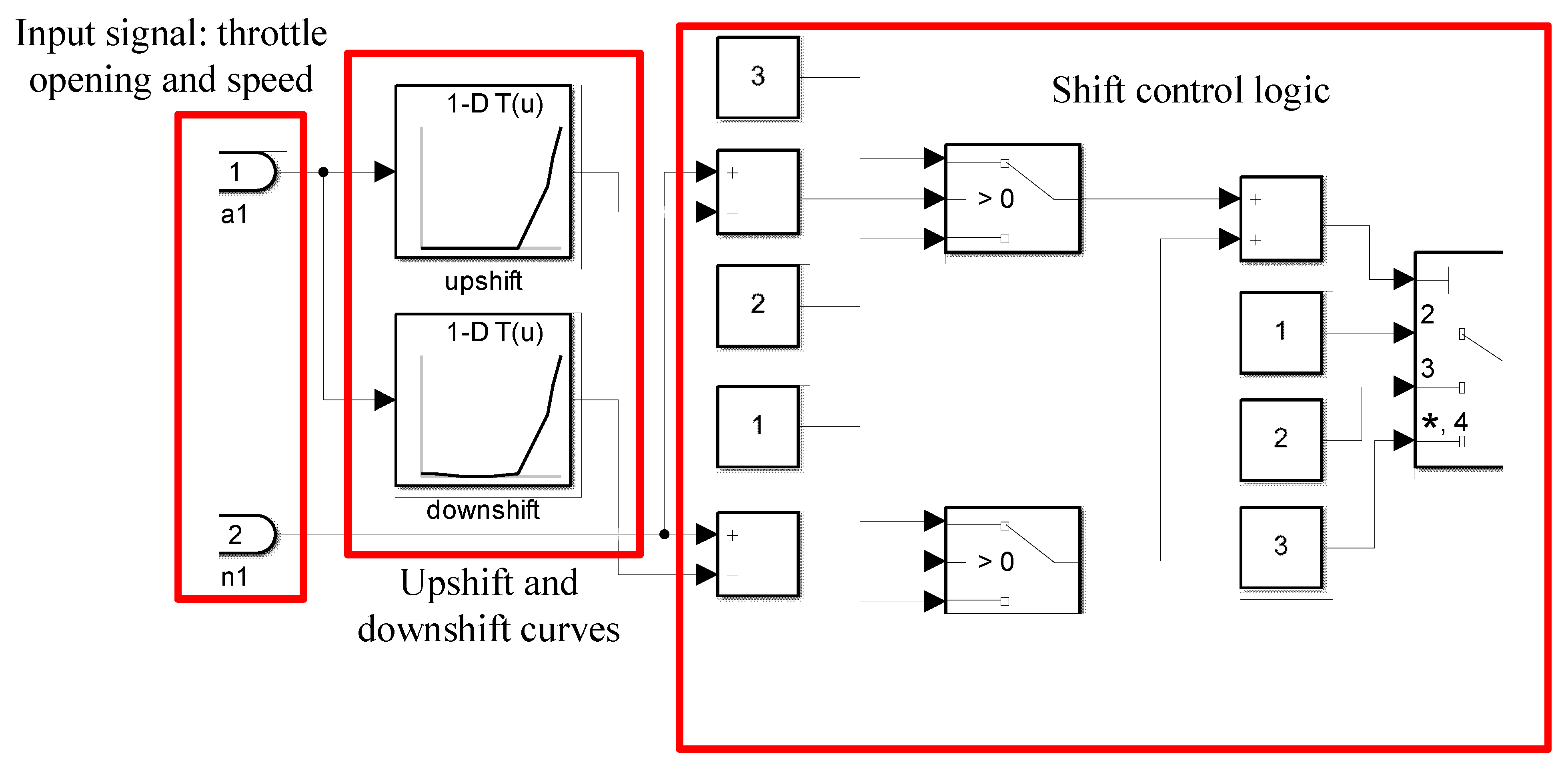
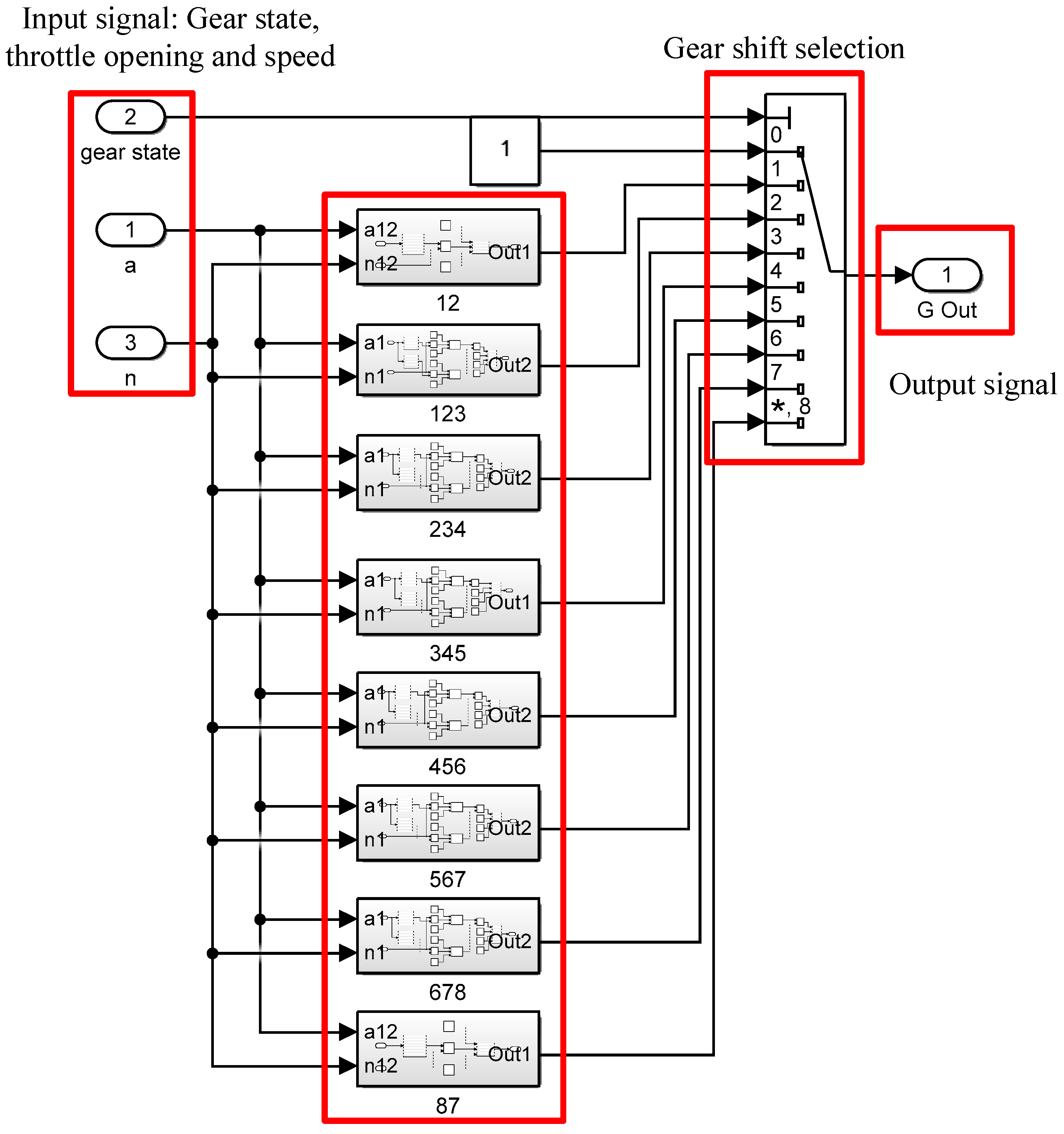
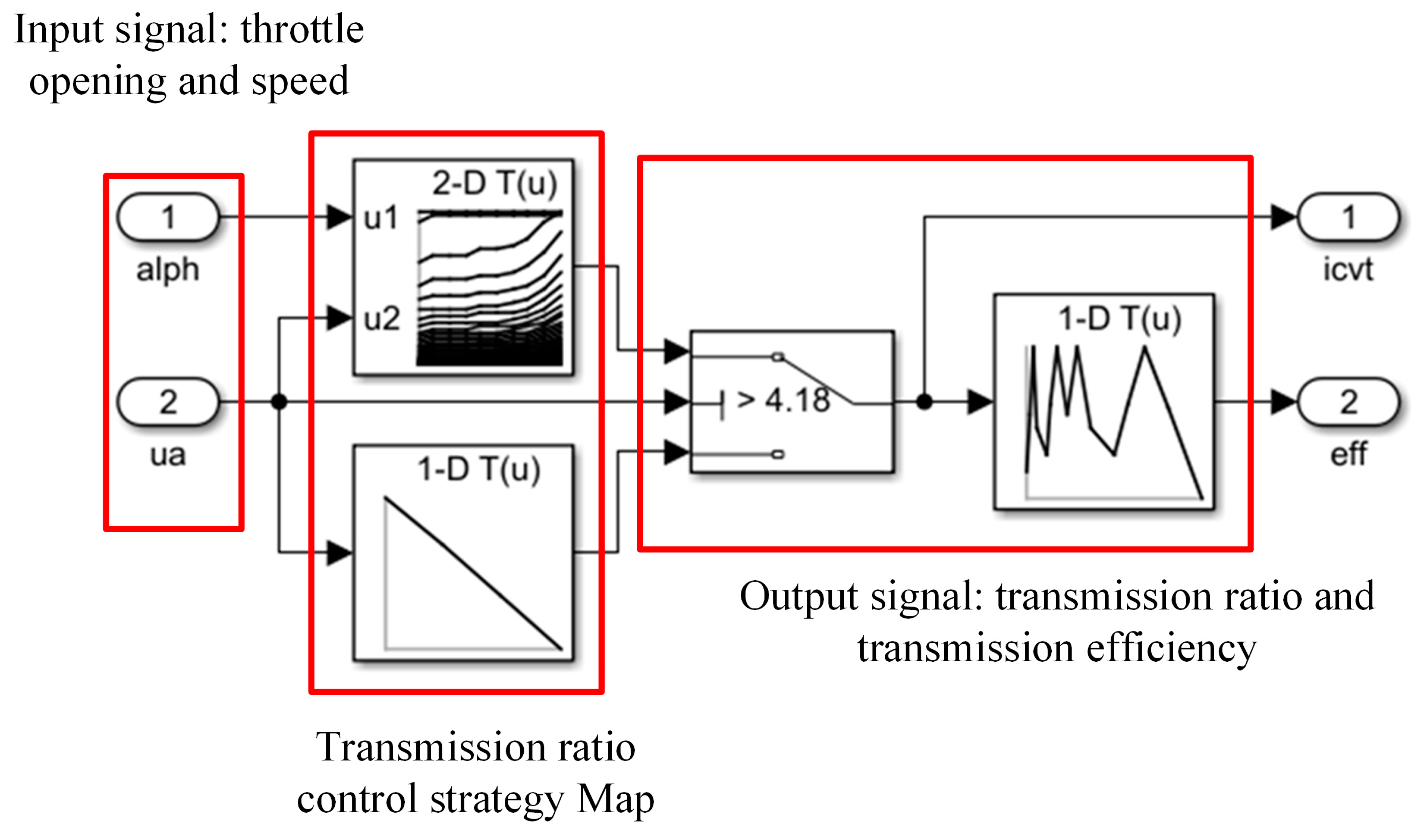
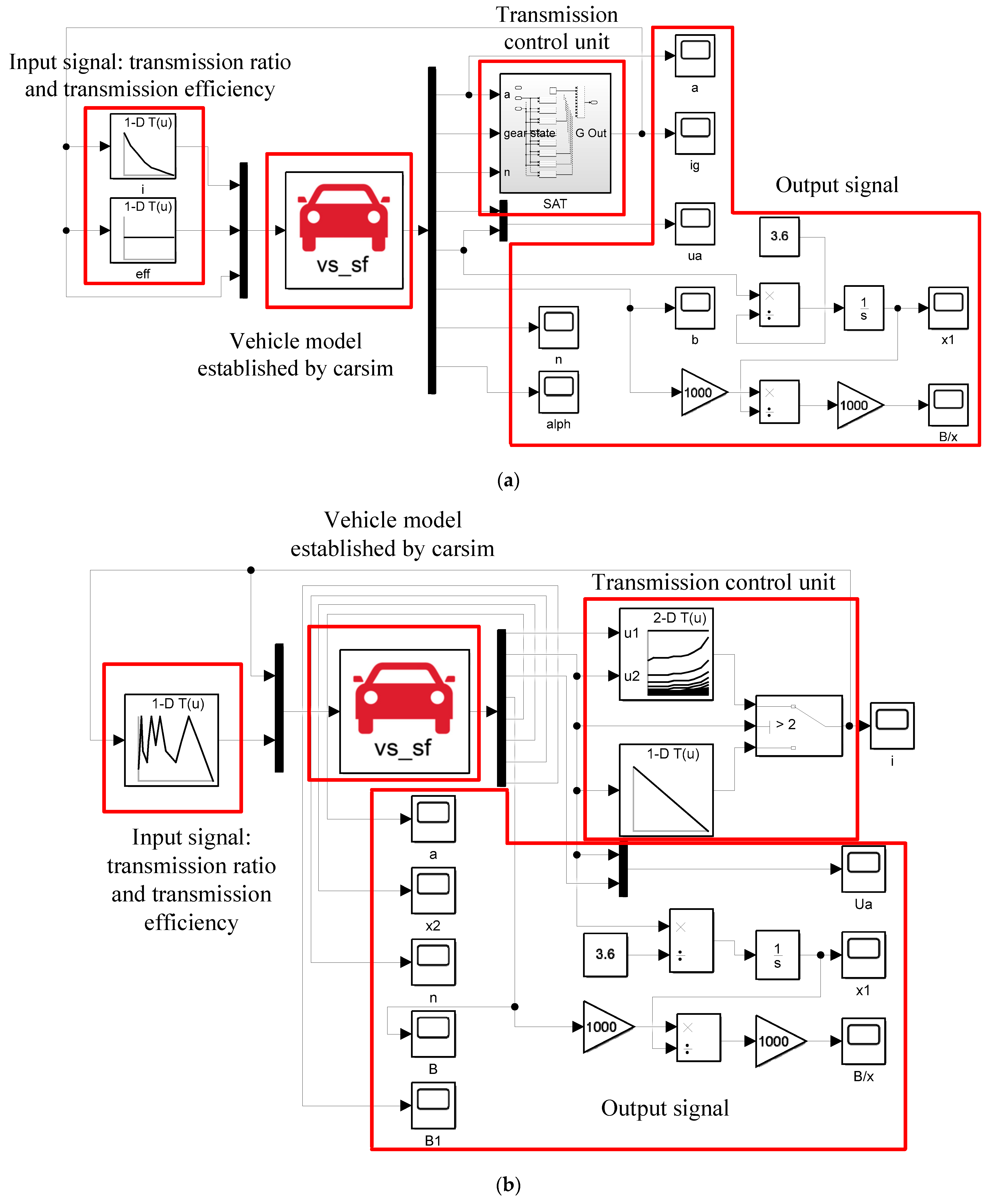
4.1. Transmission Ratio Control Model of SAT
4.2. Transmission Ratio Control Model of HMCVT
4.3. Vehicle Parameters
4.4. United Simulation Test
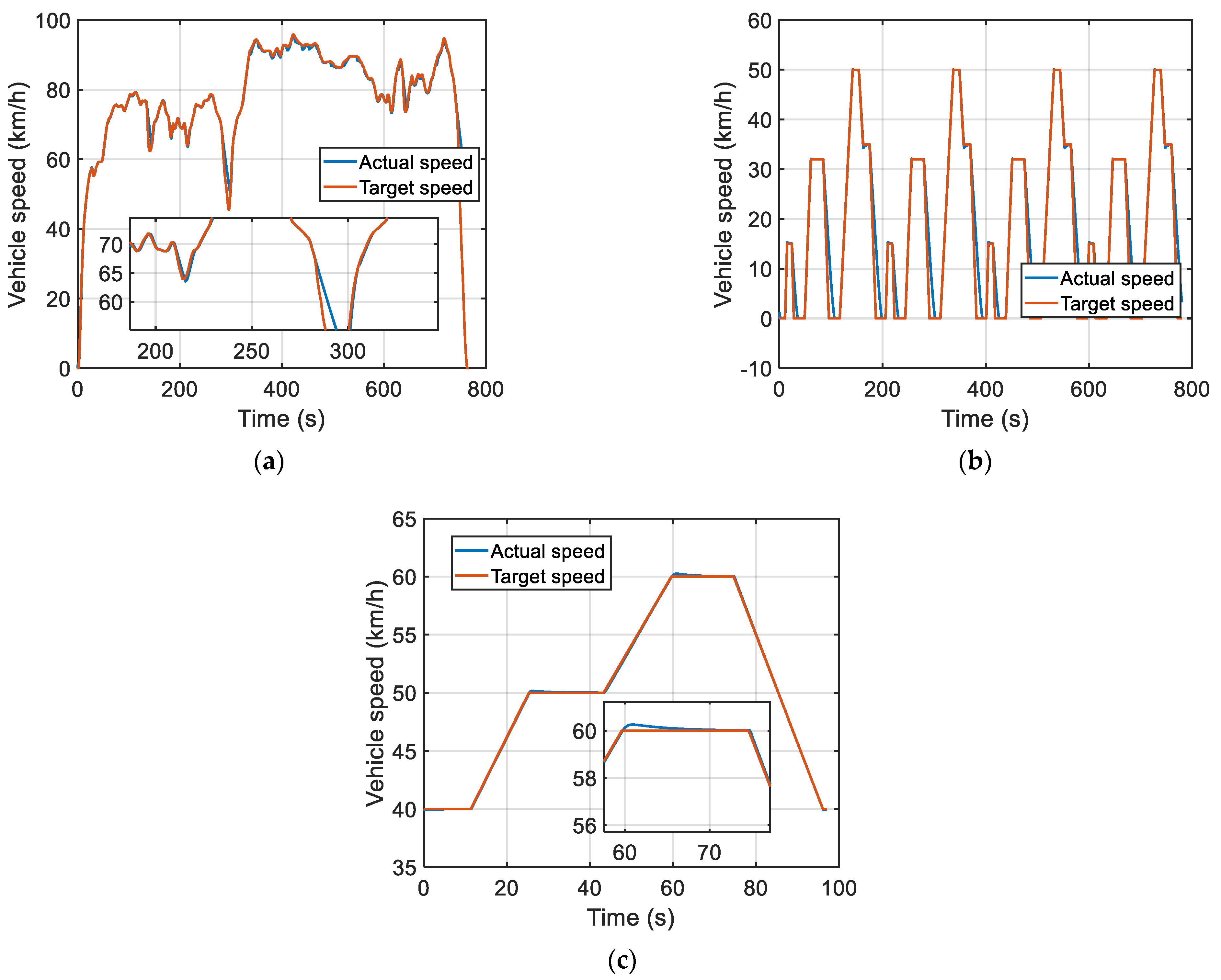
4.5. Setting of Driving Cycle
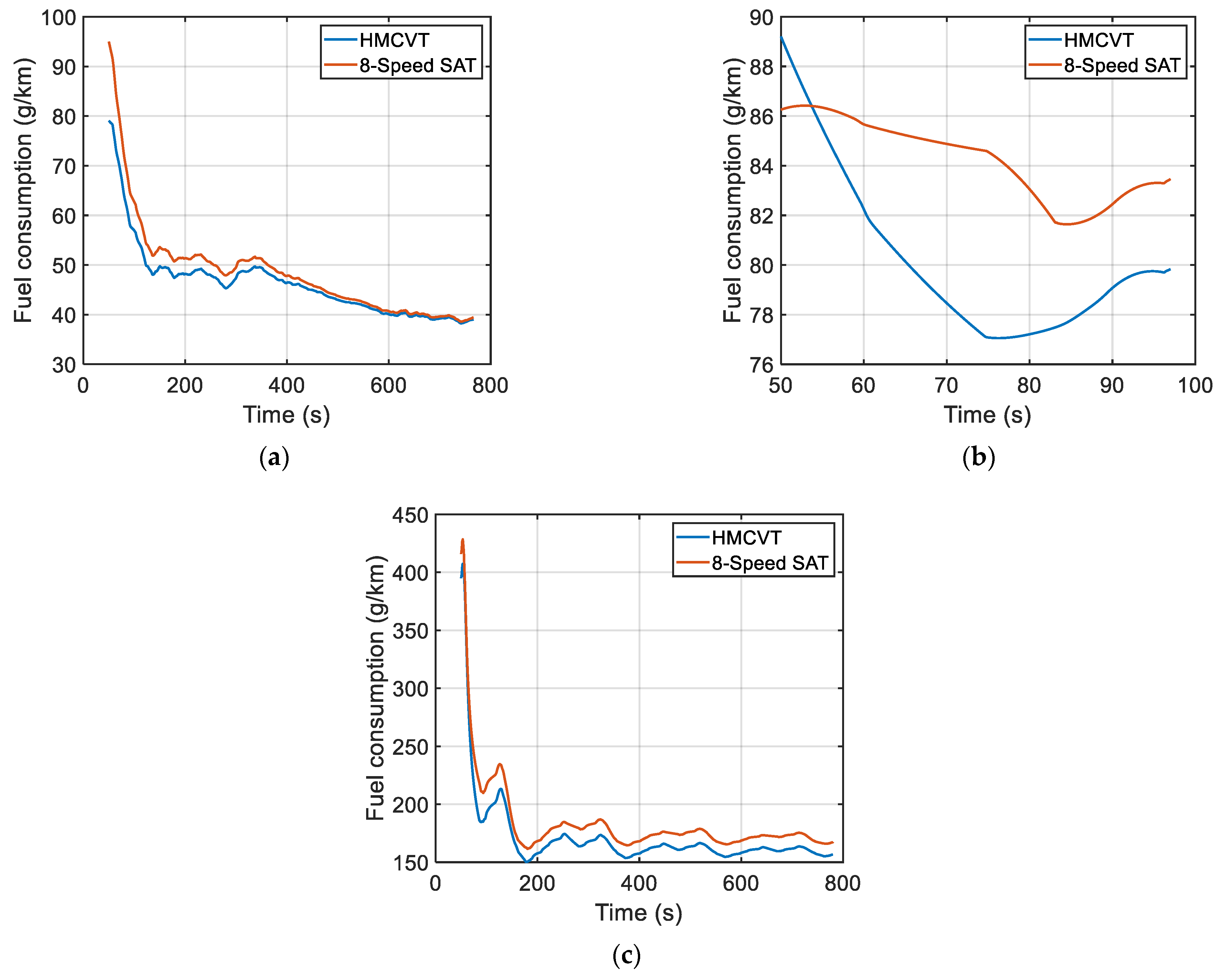
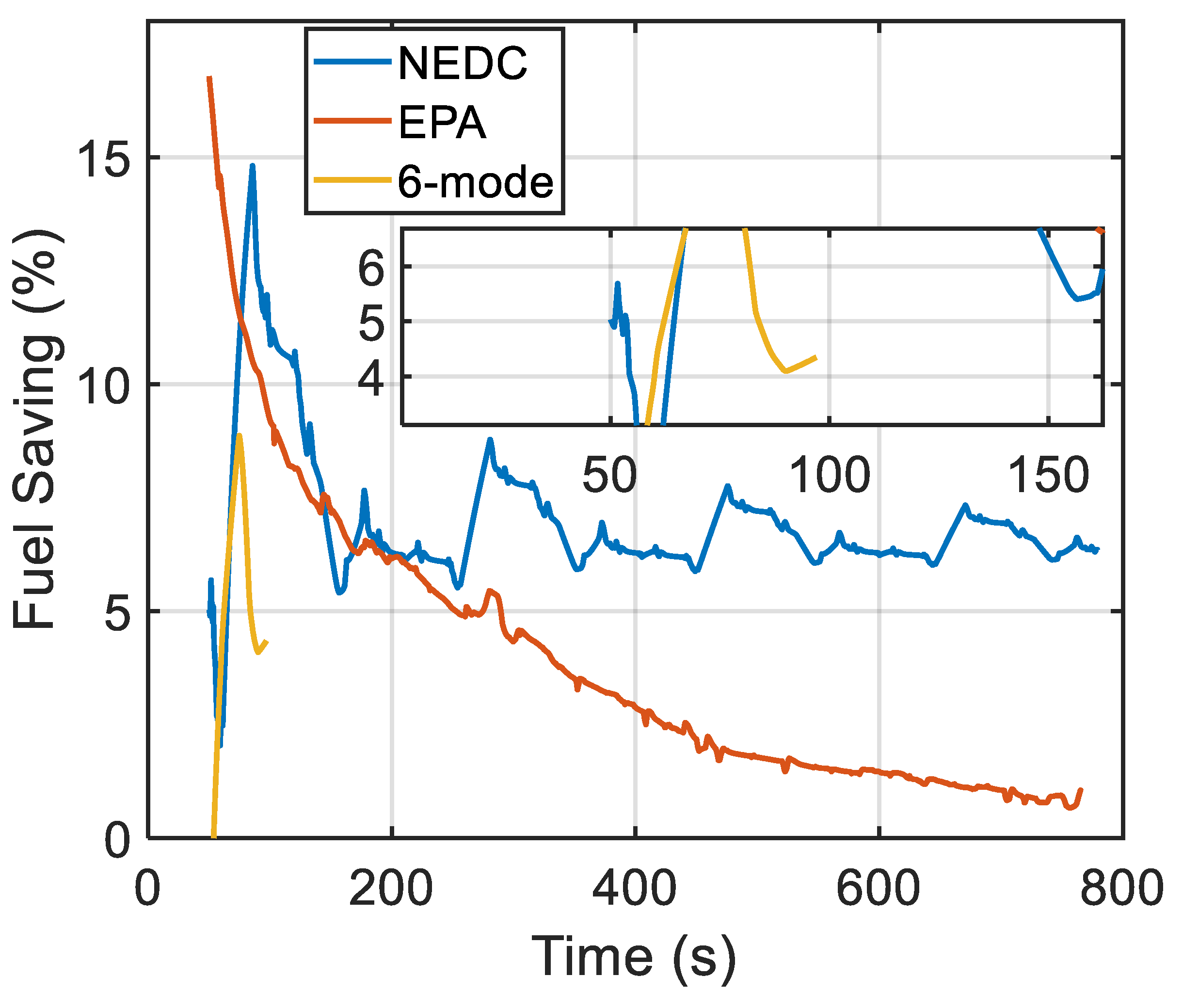
5. Results and Discussion of Fuel Consumption Comparison
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhou, M. Research on the Fuel Economy of Automatic Transmission Vehicles for Running on the Hilly Roads. Master’s Thesis, Beijing Institute of Technology, Beijing, China, 2016. [Google Scholar]
- Zhou, W.L.; Zheng, Y.P.; Pan, Z.J.; Lu, Q. Review on the Battery Model and SOC Estimation Method. Processes 2021, 9, 1685. [Google Scholar] [CrossRef]
- Wang, H.; Zheng, Y.P.; Yu, Y. Lithium-Ion Battery SOC Estimation Based on Adaptive Forgetting Factor Least Squares Online Identification and Unscented Kalman Filter. Mathematics 2021, 9, 1733. [Google Scholar] [CrossRef]
- Tian, J.; Wang, Q.; Ding, J.; Wang, Y.Q.; Ma, Z.S. Integrated control with DYC and DSS for 4WID electric vehicles. IEEE Access 2019, 7, 124077–124086. [Google Scholar] [CrossRef]
- Wang, H.; Zheng, Y.P.; Yu, Y. Joint estimation of soc of lithium battery based on dual Kalman filter. Processes 2021, 9, 1412. [Google Scholar] [CrossRef]
- Chang, C.C.; Zheng, Y.P.; Yu, Y. Estimation for battery state of charge based on temperature effect and fractional extended Kalman filter. Energies 2020, 13, 5947. [Google Scholar] [CrossRef]
- Li, D.X.; Li, Y.J.; Ma, Z.S.; Zheng, M.; Lu, Z.H. Exergetic performance coefficient analysis and optimization of a high-temperature proton exchange membrane fuel cell. Membranes 2022, 12, 70. [Google Scholar] [CrossRef]
- Li, Y.J.; Li, D.X.; Ma, Z.S.; Zheng, M.; Lu, Z.H. Thermodynamic modeling and performance analysis of vehicular high-temperature proton exchange membrane fuel cell system. Membranes 2022, 12, 72. [Google Scholar] [CrossRef]
- Wang, X. Research of Automobile Fuel Economy Based on Transmission Efficiency. Master’s Thesis, Chongqing University, Chongqing, China, 2010. [Google Scholar]
- Wang, J.X.; Wang, Q.N.; Zhou, Y.S.; Wang, X.Y. Research on CVT speed ratio control method based on external characteristics of engine. Automot. Technol. 2009, 10, 1–4. [Google Scholar]
- Yin, X.F.; Chen, Q.S. Progress in gearshift schedule for automotive stepped automatic transmissions. J. Xihua Univ. 2020, 39, 66–72. [Google Scholar]
- Gao, W.; Zou, Y.; Sun, F.C. Two-parameter optimal shifting control for the AMT of a battery electric bus. Automot. Eng. 2016, 38, 344–349+361. [Google Scholar]
- Foffina, A.; Hass, O.; Ersanilli, V.; Burnham, K.; Mahtani, J.; Woolley, C.; Vithanage, K. Multi-objective genetic algorithm for an automatic transmission gear shift map. IFAC-PapersOnLine 2016, 49, 123–128. [Google Scholar] [CrossRef]
- Bracard, S.; Laguitton, O.; Rouge, M. Diesel engine and automated transmission-powertrain global optimisation under multiple constraints. In Proceedings of the 31st FISITA World Automotive Congress, Yokohama, Japan, 22–27 October 2006; p. 318. [Google Scholar]
- Ngo, V.D.; Hofman, T.; Steinbuch, M.; Serrarens, A. Gear shift map design methodology for automotive transmissions. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2014, 228, 50–72. [Google Scholar] [CrossRef]
- Qin, T.; Yang, G.L.; Hu, M.H.; Liu, Y.G.; Lin, Y.P. Energy management strategy of plug-in hybrid electric system based on driving intention. J. Jilin Univ. 2015, 45, 1743–1750. [Google Scholar]
- Fandzyana, C.A.; Hofman, T. Integrated design for a CVT: Dynamical optimization of actuation and control. IFAC PapersOnLine 2019, 52, 393–398. [Google Scholar] [CrossRef]
- Lee, H.; Sung, J.; Lee, H.; Zheng, C.; Lim, W.; Cha, S.W. Model-based integrated control of engine and CVT to minimize fuel use. Int. J. Automot. Technol. 2018, 19, 687–694. [Google Scholar] [CrossRef]
- Onumata, Y.; Zhao, H.Y.; Wang, C.; Morina, A.; Neville, A. Interactive effect between organic friction modifiers and additives on friction at metal pushing V-belt CVT components. Tribol. Trans. 2018, 61, 474–481. [Google Scholar] [CrossRef]
- Ji, J.; Park, J.; Kwon, O.; Chai, M.; Lee, D.; Kim, H. Macroslip detection and clamping force control for a metal V-belt continuously variable transmission. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2014, 228, 943–954. [Google Scholar] [CrossRef]
- Gauthier, J.P.; Micheau, P. Adaptive control of a continuously variable transmission subject to wear. Control. Eng. Pract. 2012, 20, 569–574. [Google Scholar] [CrossRef]
- Macor, A.; Rossetti, A. Fuel consumption reduction in urban buses by using power split transmissions. Energy Convers. Manag. 2013, 71, 159–171. [Google Scholar] [CrossRef]
- Ahn, S.; Choi, J.; Kim, S.; Lee, J.; Choi, C.; Kim, H. Development of an integrated engine-hydro-mechanical transmission control algorithm for a tractor. Adv. Mech. Eng. 2016, 7, 1–18. [Google Scholar] [CrossRef]
- Luo, Y.; Sun, D.Y.; Qin, D.T.; Chen, R.; Hu, F.B. Fuel optimal control of CVT equipped vehicles with consideration of CVT efficiency. J. Mech. Eng. 2010, 46, 80–86. [Google Scholar] [CrossRef]
- Hao, Y.Z.; Sun, D.Y.; Lin, Y.P.; Liu, S. Overall optimization control strategy of continuously variable transmission system. J. Mech. Eng. 2013, 49, 84–91. [Google Scholar] [CrossRef]
- Zhang, M.Z.; Wang, Q.S.; Bai, D.Y.; Yin, Y.X.; Hao, X.Y. Speed changing law of hydro-mechanical CVT based on maximum efficiency of tractors. Trans. Chin. Soc. Agric. Eng. 2016, 32, 74–78. [Google Scholar]
- Hu, H.F.; Shi, L.X.; Zhang, S.Q. Simulation and experiment of hydro-mechanical CVT control strategy for tractors. Control. Eng. China 2017, 24, 2290–2295. [Google Scholar]
- Wang, Q.S.; Zhang, M.Z.; Bai, D.Y.; Yin, Y.X.; Hao, X.Y. Fuzzy adaptive PID control for multi-range hydro-mechanical continuously variable transmission in tractor. J. Mech. Transm. 2016, 40, 23–26+37. [Google Scholar]
- Lu, Z.; Lu, Z.X.; Cheng, Z. Research on tracking speed control of HMCVT stepless segment. Mech. Sci. Technol. Aerosp. Eng. 2021, 40, 518–526. [Google Scholar]
- Zheng, X.Z.; Ren, H.L.; Sun, W. Research on speed ratio control strategy of hydro-mechanical continuously variable transmission. Agric. Equip. Veh. Eng. 2017, 55, 24–27. [Google Scholar]
- Zhao, J.; Yin, X.F.; Li, X.Y. A research on the starting characteristics and its control strategy for a heavy truck with HMCVT. Automot. Eng. 2014, 36, 715–719. [Google Scholar]
- Cheng, Z.; Chen, Y.T.; Li, W.J.; Liu, J.H.; Li, L.; Zhou, P.F.; Chang, W.J.; Lu, Z.X. Full factorial simulation test analysis and I-GA based piecewise model comparison for efficiency characteristics of hydro mechanical CVT. Machines 2022, 10, 358. [Google Scholar] [CrossRef]
- Zhou, G.Q.; Zhang, H.T.; Ge, Y.Y.; Qiu, W.; Xiao, M.H.; Xu, X.M.; Zhou, M.H. Mechanical efficiency of HMCVT under steady-state conditions. Shock. Vib. 2021, 2021, 4275922. [Google Scholar]
- Fu, R. Shift Schedule Research on Power Gearshift Transmission of Tractor. Master’s Thesis, Henan University of Science and Technology, Luoyang, China, 2015. [Google Scholar]
- Li, D.X.; Xu, B.; Tian, J.; Ma, Z.S. Energy Management strategy for fuel cell and battery hybrid vehicle based on fuzzy logic. Processes 2020, 8, 882. [Google Scholar] [CrossRef]
- Jin, G.Y.; Li, M.Y.; Zhu, B.Y. Model-based optimal gearshift strategy design for pure electric bus AMT. J. Mech. Transm. 2021, 45, 105–111. [Google Scholar]
- Chen, J.B.; Xiang, Q.Q. Establishing Simulink/Carsim co-simulation platform for distributed drive electric vehicle. Mech. Sci. Technol. Aerosp. Eng. 2018, 37, 1496–1500. [Google Scholar]
- So, J.J.; Park, B.B.; Yun, I. Classification modeling approach for vehicle dynamics mode-integrated traffic simulation assessing surrogate safety. J. Adv. Transp. 2015, 49, 416–433. [Google Scholar] [CrossRef]
- Zhuo, H.T. Analysis of American automobile emission regulations. Auto Maint. Repair 2021, 12–20. [Google Scholar] [CrossRef]
- Li, R.Y. Energy recovery of electric vehicle base on NEDC cycle. Automob. Appl. Technol. 2021, 46, 1–4. [Google Scholar]
- Ren, C.Z.; Wang, C.B.; Chang, X.Z.; Xie, Y.; Gao, L.C. Application study on CAN data bussing system in energy saving and emission reduction of automobile. Henan Sci. 2017, 35, 1801–1805. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | ipim | i1 | iR | i3 | i4 | i5 | i6 | k1 | k2 |
|---|---|---|---|---|---|---|---|---|---|
| Value | 1.18 | 1.27 | 1.27 | 1.16 | 1.22 | 2.76 | 1.00 | 2.00 | 3.79 |
| a1 | a2 | b1 | b2 | |
|---|---|---|---|---|
| HM1 | 0.9236 | 0.05808 | 0.9215 | −0.04164 |
| HM2 | 0.9211 | 0.04814 | 0.9264 | −0.08895 |
| HM3 | 0.9238 | 0.05846 | 0.9217 | −0.04208 |
| HM4 | 0.9215 | 0.04862 | 0.9267 | −0.08928 |
| SAT | ig1 | ig2 | ig3 | ig4 | ig5 | ig6 | ig7 | ig8 |
|---|---|---|---|---|---|---|---|---|
| 8-speed | 7.55 | 5.40 | 3.86 | 2.76 | 1.97 | 1.41 | 1.01 | 0.72 |
| Parameter or Indicator | Value |
|---|---|
| Sprung Mass/kg | 1306 |
| Frontal Area/m2 | 3 |
| Wheel Base/m | 2.78 |
| Final Drive Ratio | 3.264 |
| Total Driveline Efficiency excluding Transmission | 0.9 |
| Wheel Radius/m | 0.34 |
| Maximum Speed/(km/h) | 120 |
| Averages of Fuel Consumption per Unit Journey of a Pickup Truck | |||
|---|---|---|---|
| EPA | NEDC | 6-Mode | |
| HMCVT (g/km) | 46.29 | 170.52 | 80.17 |
| 8-Speed SAT (g/km) | 48.48 | 183.38 | 84.25 |
| Averages of Fuel Saving | 4.52% | 7.01% | 4.84% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Cheng, Z.; Qian, Y. Fuel Consumption Comparison between Hydraulic Mechanical Continuously Variable Transmission and Stepped Automatic Transmission Based on the Economic Control Strategy. Machines 2022, 10, 699. https://doi.org/10.3390/machines10080699
Chen Y, Cheng Z, Qian Y. Fuel Consumption Comparison between Hydraulic Mechanical Continuously Variable Transmission and Stepped Automatic Transmission Based on the Economic Control Strategy. Machines. 2022; 10(8):699. https://doi.org/10.3390/machines10080699
Chicago/Turabian StyleChen, Yuting, Zhun Cheng, and Yu Qian. 2022. "Fuel Consumption Comparison between Hydraulic Mechanical Continuously Variable Transmission and Stepped Automatic Transmission Based on the Economic Control Strategy" Machines 10, no. 8: 699. https://doi.org/10.3390/machines10080699