
Active Control of Torsional Vibration during Mode Switching of Hybrid Powertrain Based on Adaptive Model Reference


Abstract
:1. Introduction and State-of-Art
- i.
- Active vibration reduction by feedback control and frequency correction
- ii.
- Dynamic coordinated control of torque disturbance compensation
2. Powertrain Modeling
2.1. P2 Hybrid Powertrain Architecture
2.2. Dynamic Model
- i.
- Clutch free displacement stage
- ii.
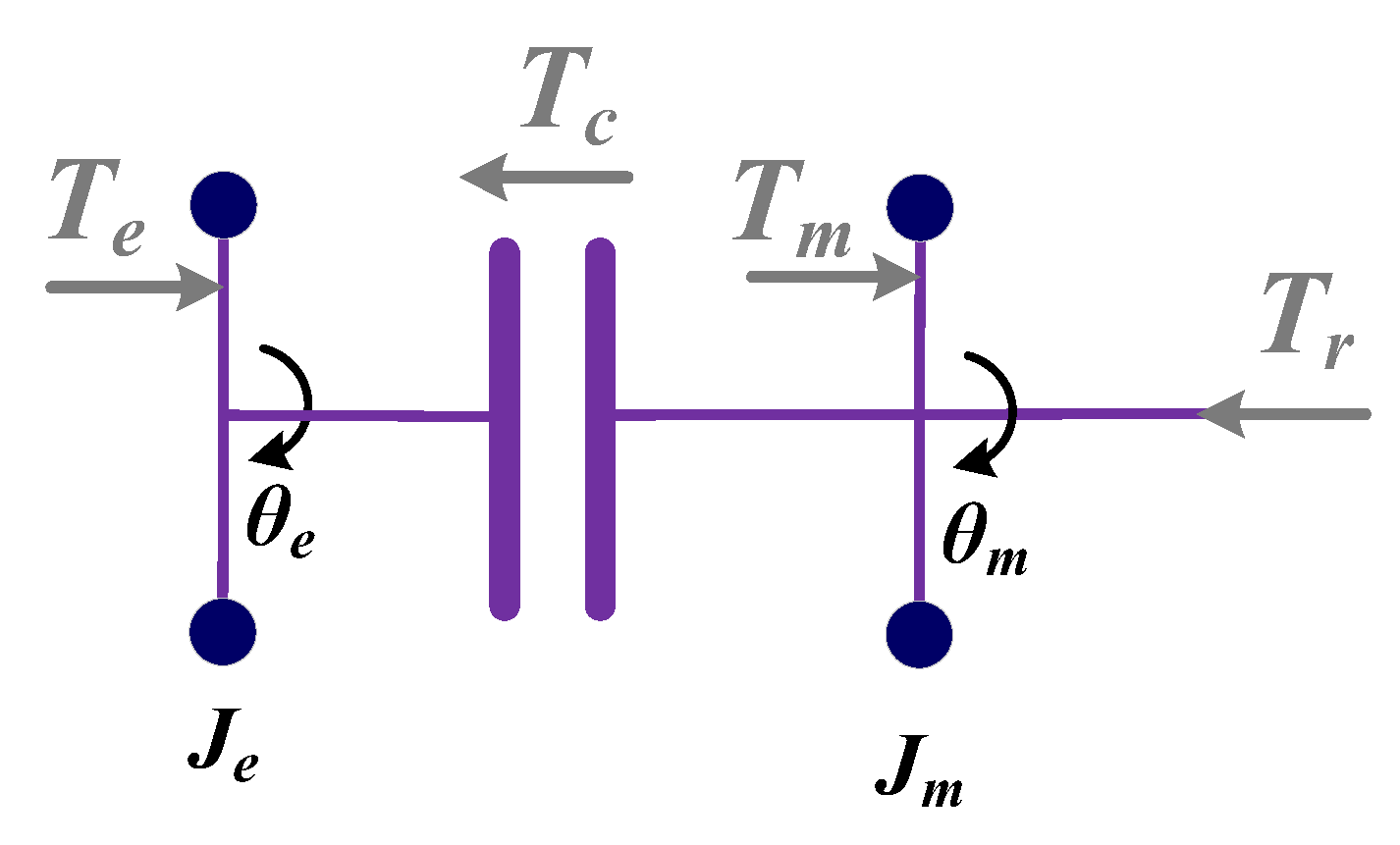
- The first stage of clutch slip
- iii.
- The second stage of clutch slip
- iv.
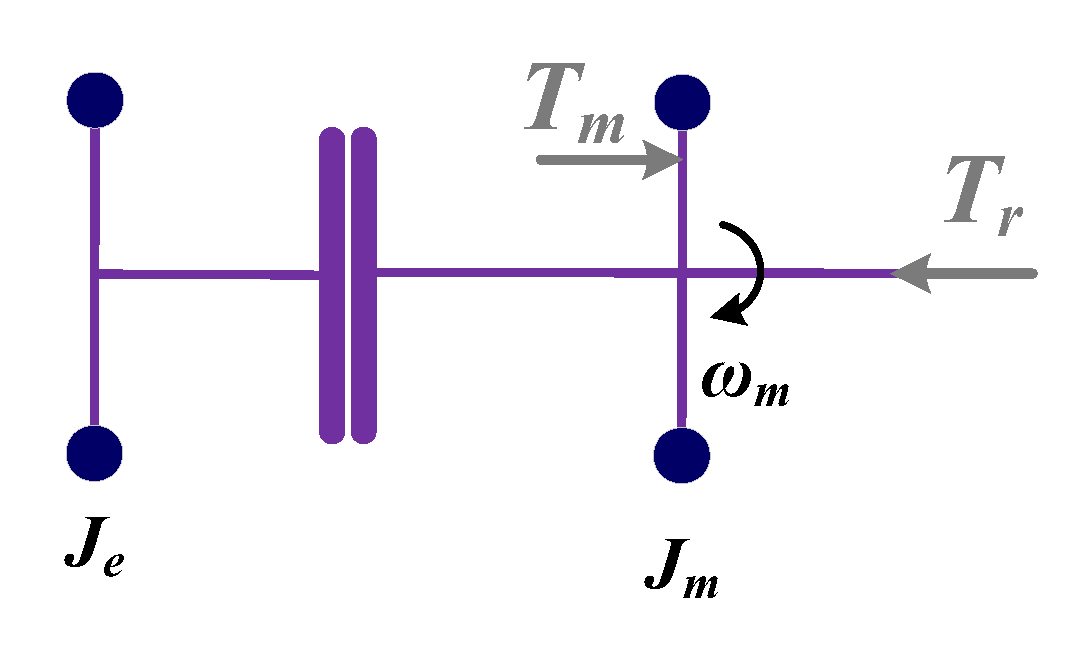
- Speed synchronization stage
- v.
- Full participation stage
3. Active Control Algorithm
3.1. Basic Principle of Controller
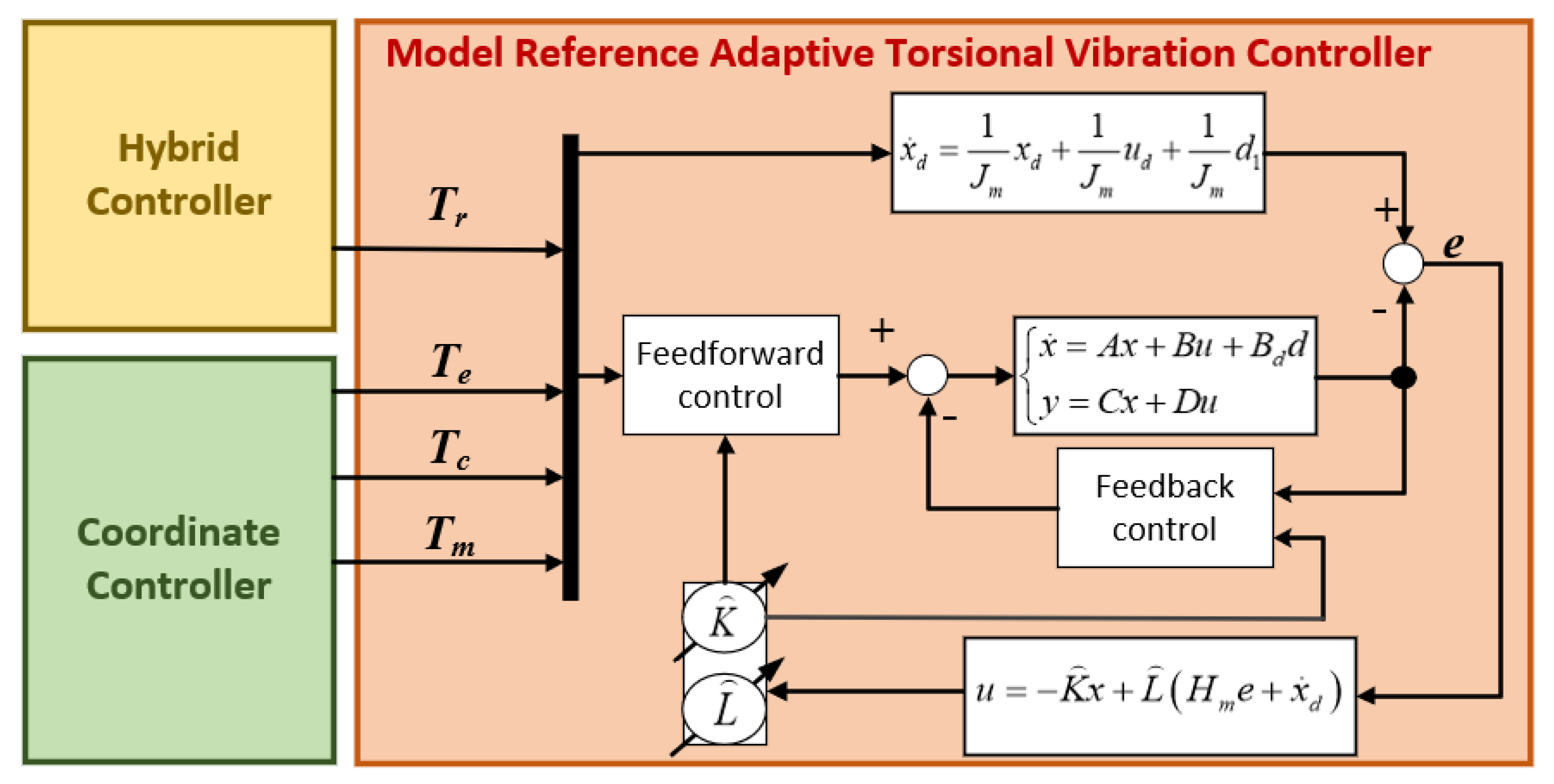
- Reference model refers to an ideal system with a stable structure and constant parameters, and its output represents the expected performance. Under the influence of the reference input r of the control system, the output y of the model is set to adjust the output state of the controlled object in real time according to the ideal output ym of the reference model.
- The adjustable system consists of the controlled object, the front controller and the feedback controller. The state characteristic requirements of the adjustable system are given by reference models such as overshoot, damping performance, transition time and passband.
- Affected by external influences and random changes of the internal structure of the system (parameter deviation, etc.), there will be a deviation e between the actual output y of the controlled object and the ideal output ym. When the adaptive mechanism receives the speed deviation signal, it will adjust the control parameters of the control system according to the pre-designed adaptive law. As such, this will either mobilize the feedforward controller and feedback controller, or generate the auxiliary input to eliminate errors, so that the process output is consistent with the reference model output.
3.2. The Scheme of Torsional Vibration Controller
3.2.1. Derivation of Controller
3.2.2. Proof of Stability
4. Result and Discussion
4.1. Simulation Environments
4.2. Simulation Results
5. Conclusions and Future Work
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
References
- Syed, F.U.; Kuang, M.L.; Ying, H. Active Damping Wheel-Torque Control System to Reduce Driveline Oscillations in a Power-Split Hybrid Electric Vehicle. IEEE Trans. Veh. Technol. 2009, 58, 4769–4785. [Google Scholar] [CrossRef]
- Su, Y.; Hu, M.; Su, L.; Qin, D.; Zhang, T.; Fu, C. Dynamic coordinated control during mode transition process for a compound power-split hybrid electric vehicle. Mech. Syst. Signal Process. 2018, 107, 221–240. [Google Scholar] [CrossRef]
- Valenzuela, M.A.; Bentley, J.M.; Villablanca, A.; Lorenz, R.D. Dynamic compensation of torsional oscillation in paper machine section. IEEE Trans. Ind. Appl. 2019, 41, 1458–1466. [Google Scholar] [CrossRef]
- Liu, H.; XZhang Chen, Y.; Taha, M.; Xu, H. Active damping of driveline vibration in power-split hybrid vehicles based on model reference control. Control Eng. Pract. 2019, 91, 104085.1–104085.9. [Google Scholar] [CrossRef]
- Fu, H.; Tian, G.; Chen, H. Research on torsional vibration control of motor-transmission integrated drive system. Automot. Eng. 2010, 32, 596–600. [Google Scholar]
- Zhang, X.; Liu, H.; Yin, Q.C. Active Damping of Torsional Vibration on the Powertrain of Power-split Vehicle. Energy Procedia 2017, 105, 2898–2903. [Google Scholar] [CrossRef]
- Berriri, M.; Chevrel, P.; Lefebvre, D. Active damping of automotive powertrain oscillations by a partial torque compensator. Control Eng. Pract. 2008, 16, 874–883. [Google Scholar] [CrossRef]
- Zhao, Z.; Wang, C.; Zhang, T.; Li, M. Feedforward correction and active damping anti-shake control of pure electric Tip-In/Out. Automot. Eng. 2018, 40, 19–27. [Google Scholar]
- Zhou, Z.; Guo, R. A Disturbance-Observer-Based Feedforward-Feedback Control Strategy for Driveline Launch Oscillation of Hybrid Electric Vehicles Considering Nonlinear Backlash. IEEE Trans. Veh. Technol. 2022, 71, 3727–3736. [Google Scholar] [CrossRef]
- Walker, P.D.; Zhang, N. Active damping of transient vibration in dual clutch transmission equipped powertrains: A comparison of conventional and hybrid electric vehicles. Mech. Mach. Theory 2014, 77, 1–12. [Google Scholar] [CrossRef]
- Kou, Y.S.; Weslati, F. Development of a Hybrid Powertrain Active Damping Control System via Sliding Mode Control Scheme. SAE International Paper No. 01-0486. In Proceedings of the 2013 SAE International, Detroit, MI, USA, 16–18 April 2013. [Google Scholar]
- Gao, A.; Fu, Z.; Tao, F. Dynamic Coordinated Control Based on Sliding Mode Controller during Mode Switching with ICE Starting for an HEV. IEEE Access 2020, 8, 60428–60443. [Google Scholar] [CrossRef]
- Yang, C.; Shi, Y.; Li, L.; Wang, X. Efficient Mode Transition Control for Parallel Hybrid Electric Vehicle with Adaptive Dual-Loop Control Framework. IEEE Trans. Veh. Technol. 2019, 69, 1519–1532. [Google Scholar] [CrossRef]
- Wang, K. Research on Torsional Vibration of Hybrid Electric Vehicle Transmission System; Shanghai Jiaotong University: Shanghai, China, 2013. [Google Scholar]
- Tomura, S.; Ito, Y. Development of Vibration Reduction Motor Control for Series-Parallel Hybrid System. SAE Technical Paper No. 01-1125. In Proceedings of the 2006 SAE World Congress, Detroit, MI, USA, 3–6 April 2006. [Google Scholar]
- Chen, J.S.; Ying, H. Engine automatic start-stop dynamic analysis and vibration reduction for a two-mode hybrid vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2013, 227, 1303–1312. [Google Scholar] [CrossRef]
- Yong, S.K.; Park, J.; Park, T.W.; Bang, J.S.; Sim, H.S. Anti-Jerk Controller Design with a Cooperative Control Strategy in Hybrid Electric Vehicle. In Proceedings of the 8th International Conference on Power Electronics—ECCE Asia, Jeju, Korea, 30 May–3 June 2011. [Google Scholar]
- Morandin, M.; Bolognani, S.; Faggion, A. Active Torque Damping for an ICE-Based Domestic CHP System with an SPM Machine Drive. IEEE Trans. Ind. Appl. 2015, 51, 3137–3146. [Google Scholar] [CrossRef]
- Crolla, D.A.; Cao, D. The impact of hybrid and electric powertrains on vehicle dynamics, control systems and energy regeneration. Veh. Syst. Dyn. 2012, 50, 95–109. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Liang, X.; Zuo, M.J. Vibration signal modeling of a planetary gear set with transmission path effect analysis. Measurement 2016, 85, 20–31. [Google Scholar] [CrossRef]
- Cauet, S.; Coirault, P.; Njeh, M. Diesel engine torque ripple reduction through LPV control in hybrid electric vehicle powertrain: Experimental results. Control Eng. Pract. 2013, 21, 1830–1840. [Google Scholar] [CrossRef]
- Hwang, H.Y.; Lan, T.S.; Chen, J.S. Control Strategy Development of Driveline Vibration Reduction for Power-Split Hybrid Vehicles. Appl. Sci. 2020, 10, 1712. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Zhang, H.; Cao, D.; Fang, Z. Robust control of integrated motor-transmission powertrain system over controller area network for automotive applications. Mech. Syst. Signal Process. 2019, 58, 15–28. [Google Scholar] [CrossRef]
- Chen, X.; Peng, D.; Hu, J.; Li, C.; Zheng, S.; Zhang, W. Adaptive torsional vibration active control for hybrid electric powertrains during start-up based on model prediction. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 236, 09544070211056176. [Google Scholar] [CrossRef]
- Ogawa, H.; Takahashi, Y. Echo State Network Based Model Predictive Control for Active Vibration Control of Hybrid Electric Vehicle Powertrains. Appl. Sci. 2021, 11, 6621. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, Z.; Xu, Z. Optimal starting control strategy of compound power-split system based on dynamic programing algorithm. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 7, 09544070221110977. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value |
|---|---|
| Je | 0.121 (kg·m2) |
| Jm | 0.167 (kg·m2) |
| μc | 0.1 |
| Rc | 80 (mm) |
| Fb | 3 |
| Control Parameters | Efficiency of Controller in Speed Coordination Stage | Efficiency of Controller in Full Participation Stage |
|---|---|---|
| Motor speed | 93.2% | 97.5% |
| Engine speed | 79.6% | 77.4% |
| Motor acceleration | 96.7% | 82.3% |
| Engine acceleration | 88.9% | 82.3% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Peng, D.; Wu, W.; Liu, H.; Zheng, X. Active Control of Torsional Vibration during Mode Switching of Hybrid Powertrain Based on Adaptive Model Reference. Machines 2022, 10, 647. https://doi.org/10.3390/machines10080647
Chen X, Peng D, Wu W, Liu H, Zheng X. Active Control of Torsional Vibration during Mode Switching of Hybrid Powertrain Based on Adaptive Model Reference. Machines. 2022; 10(8):647. https://doi.org/10.3390/machines10080647
Chicago/Turabian StyleChen, Xing, Dan Peng, Wei Wu, Hui Liu, and Xunjia Zheng. 2022. "Active Control of Torsional Vibration during Mode Switching of Hybrid Powertrain Based on Adaptive Model Reference" Machines 10, no. 8: 647. https://doi.org/10.3390/machines10080647