
Systematic Design of a 3-DOF Dual-Segment Continuum Robot for In Situ Maintenance in Nuclear Power Plants

 ,
,
Abstract
:1. Introduction
2. Mechanism Design
2.1. Design Requirements of the Continuum Robot
2.2. Design of the Dual-Segment Continuum Robot
3. Kinematic Analysis of the Dual-Segment Continuum Robot
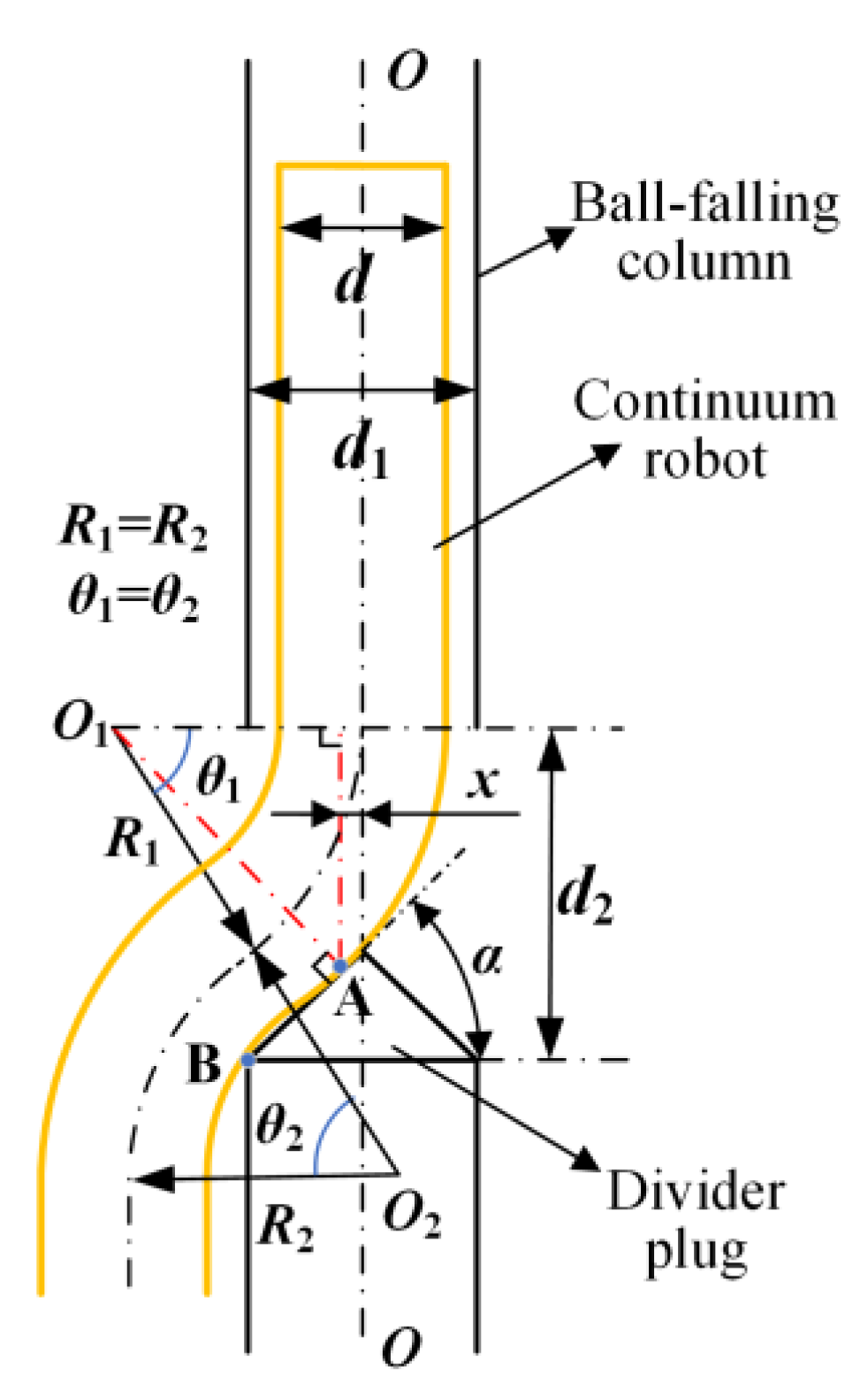
3.1. Passive Flexible Deformation
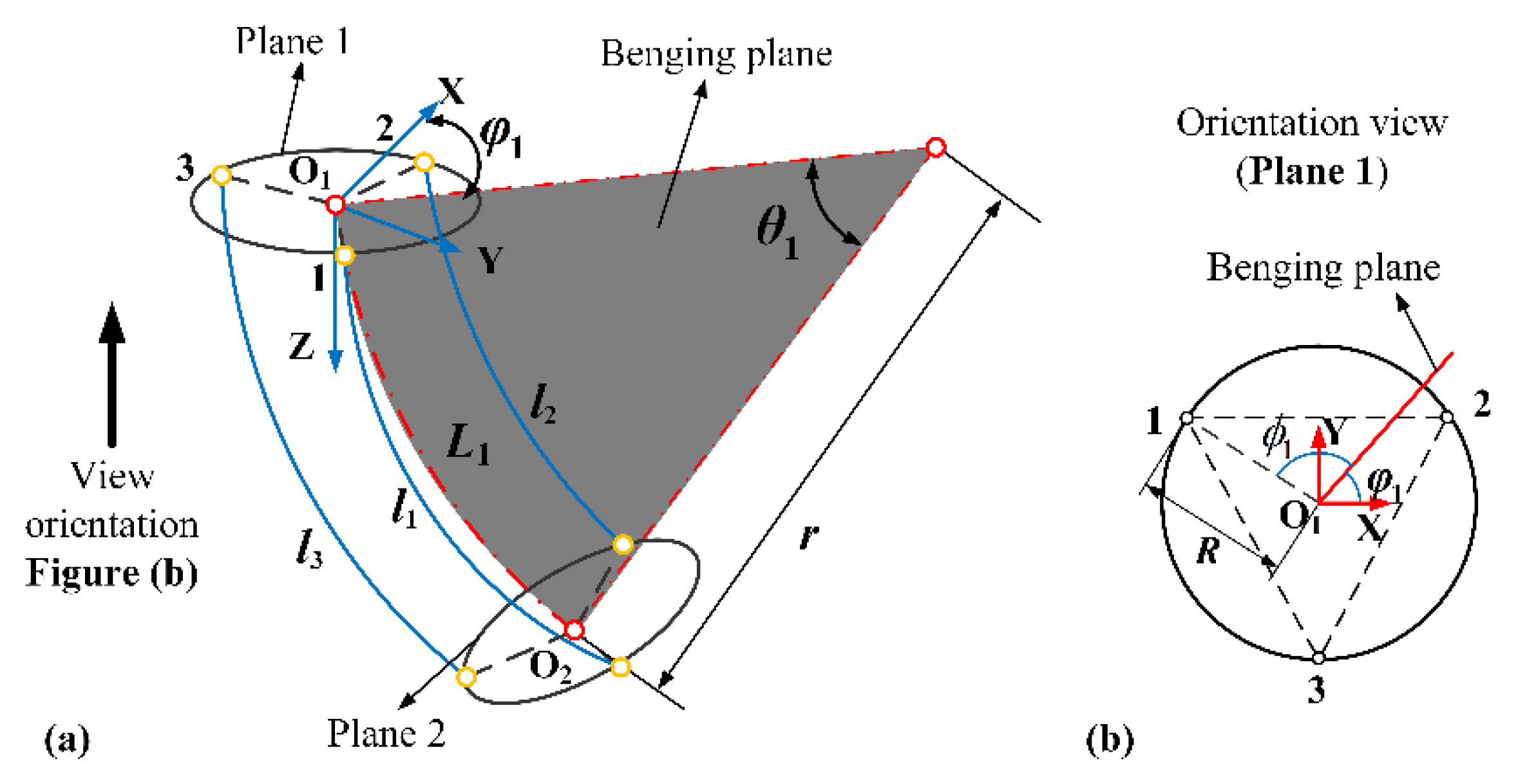
3.2. Forward Kinematics
3.3. Inverse Kinematics
3.4. Workspace Simulation Analysis
4. Test Prototype
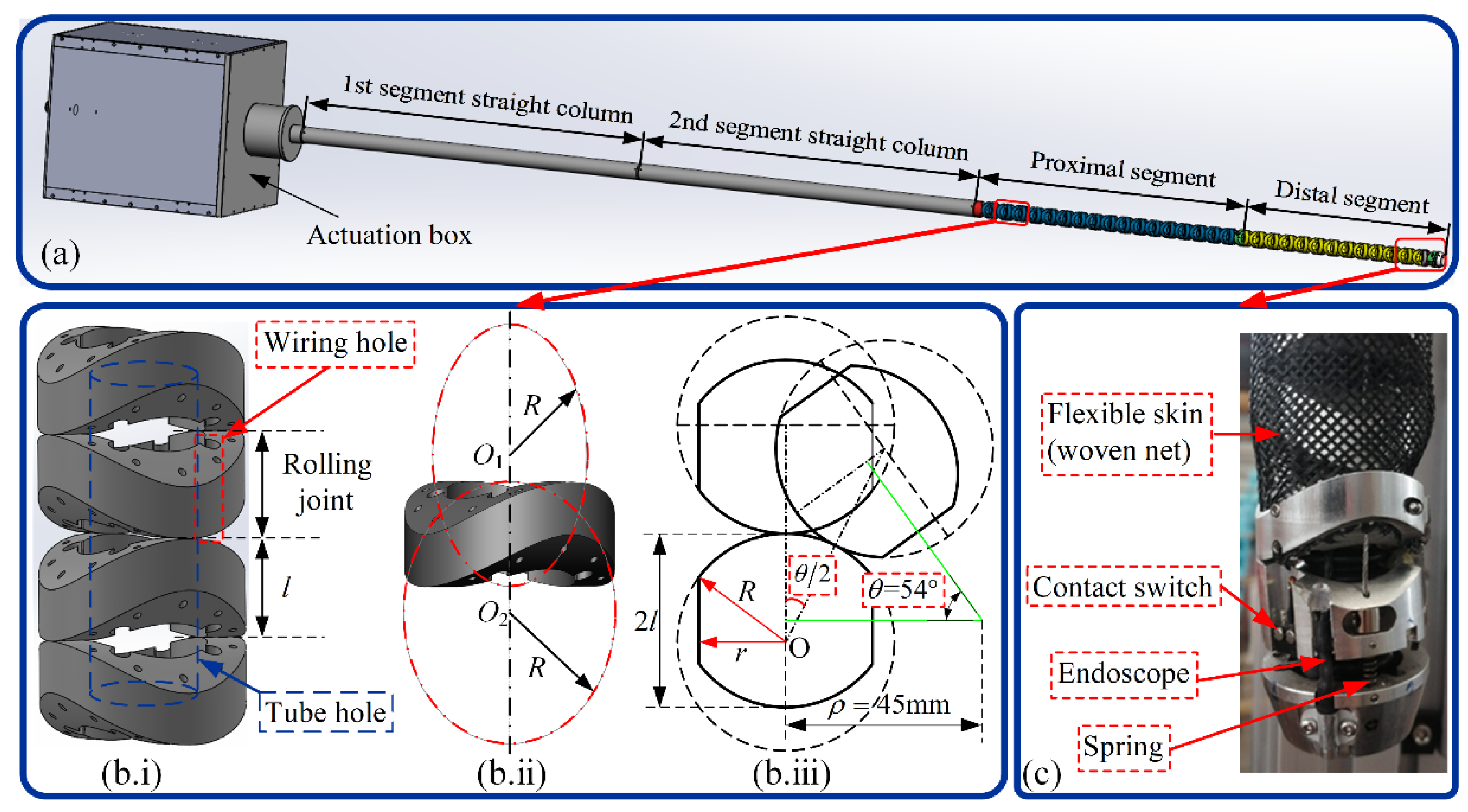
4.1. Prototype of the Dual-Segment Continuum Robot
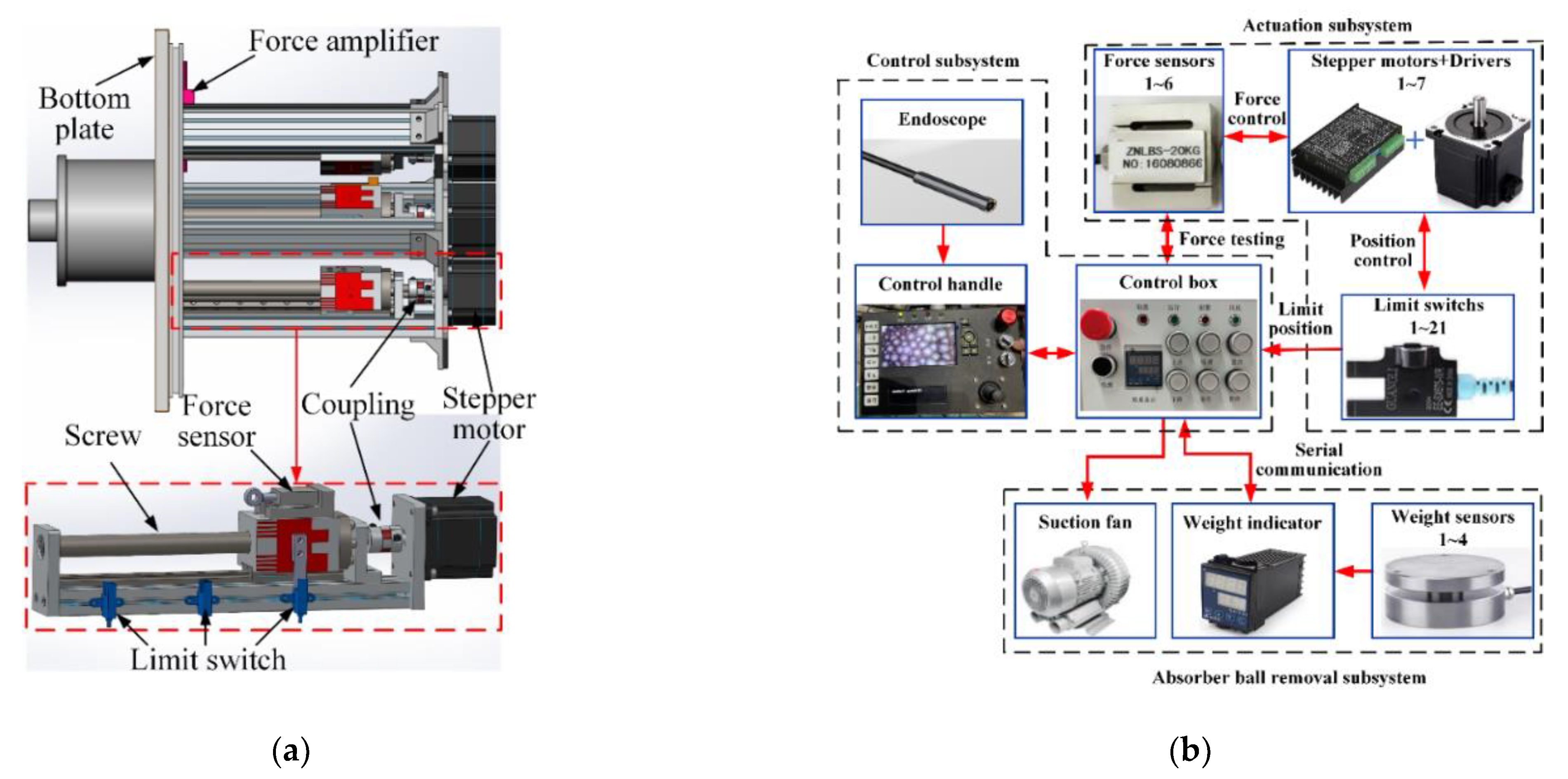
4.2. Actuation and Control System
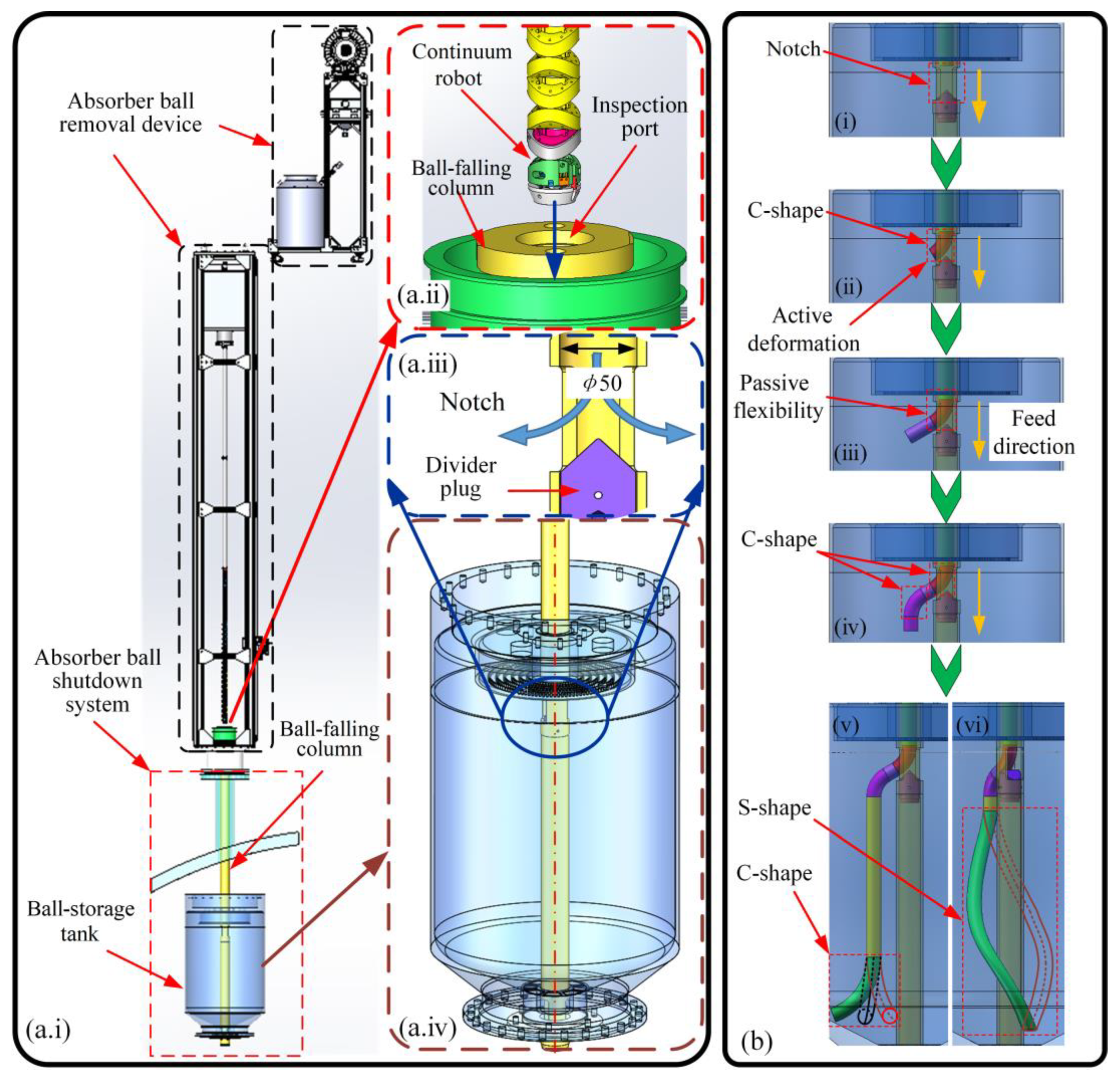
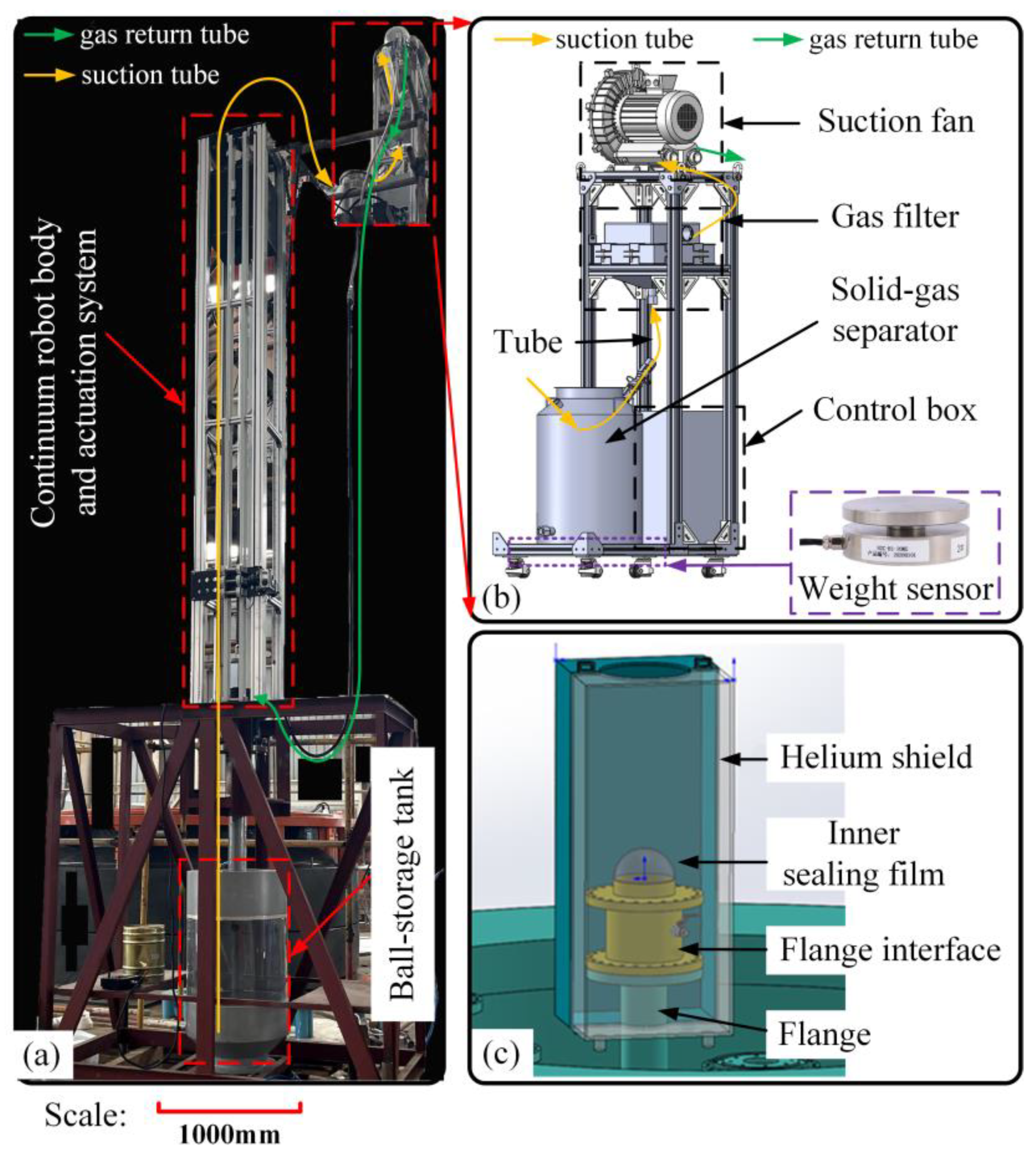
4.3. Absorber Ball Removal System
5. Prototype Test Verification
5.1. Tests for Functions 1 and 2
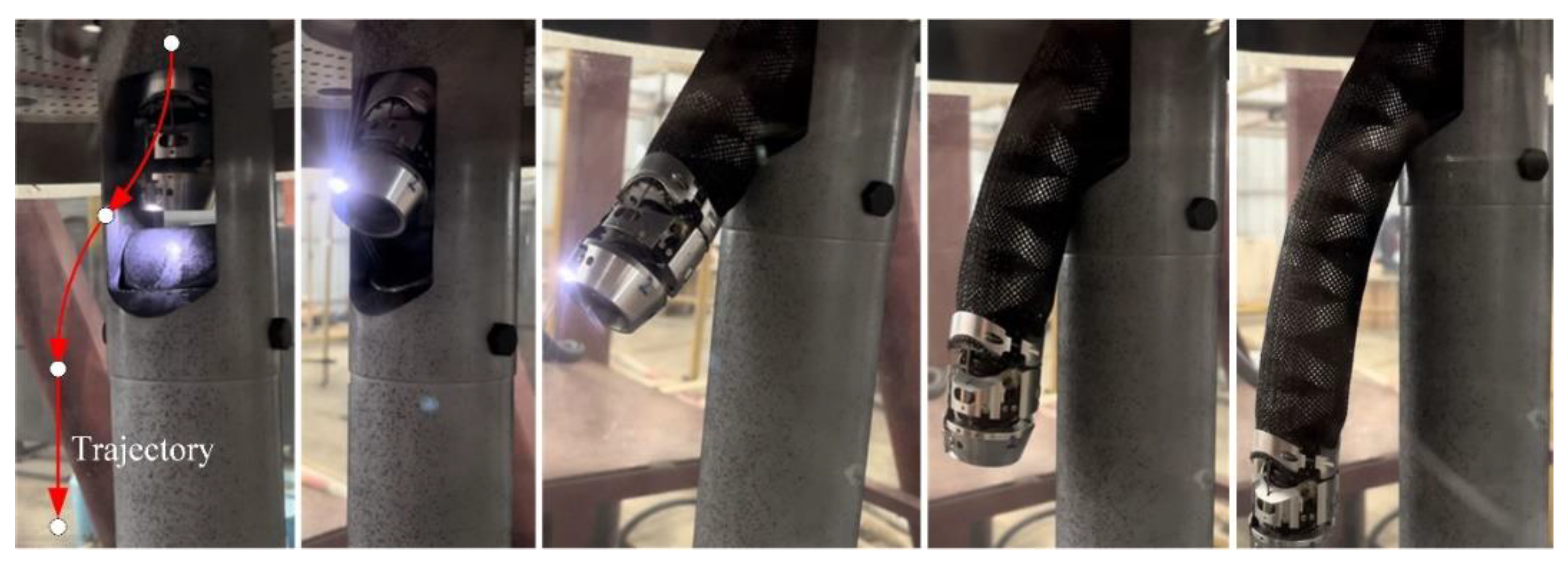
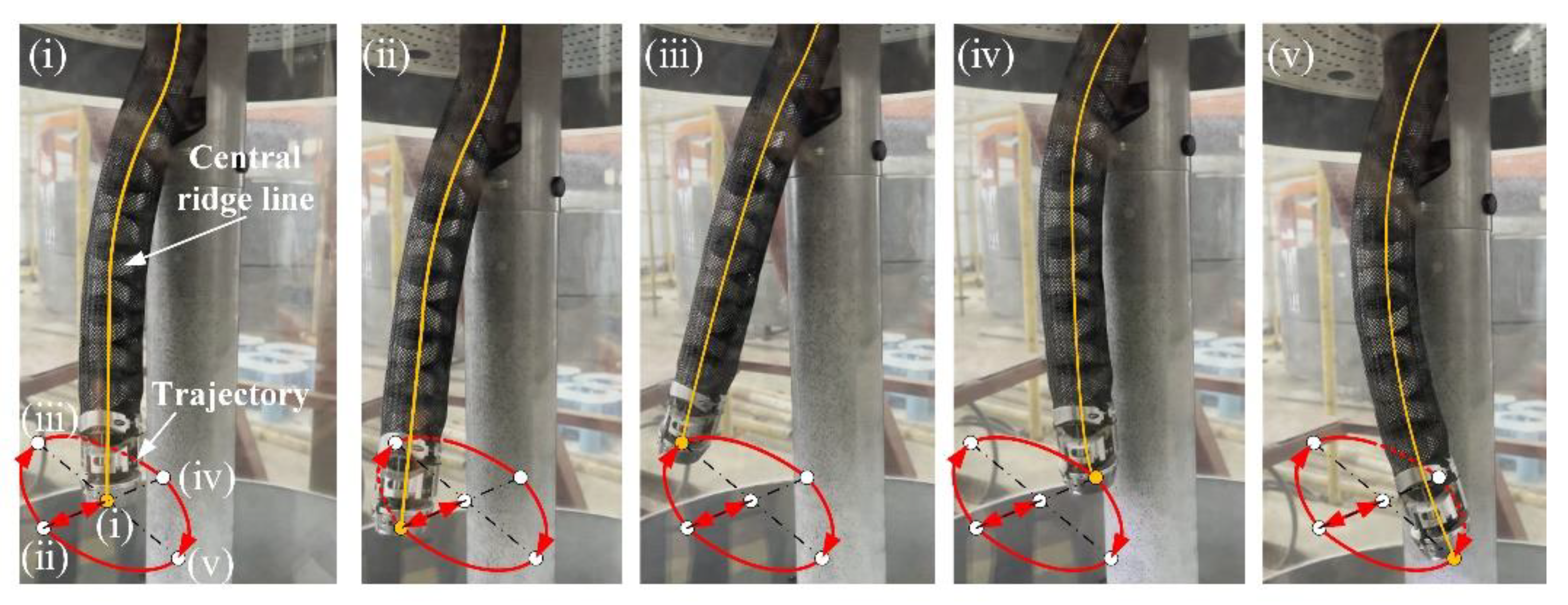
5.2. Test for Function 3
5.3. Discussion
6. Conclusions
- (i)
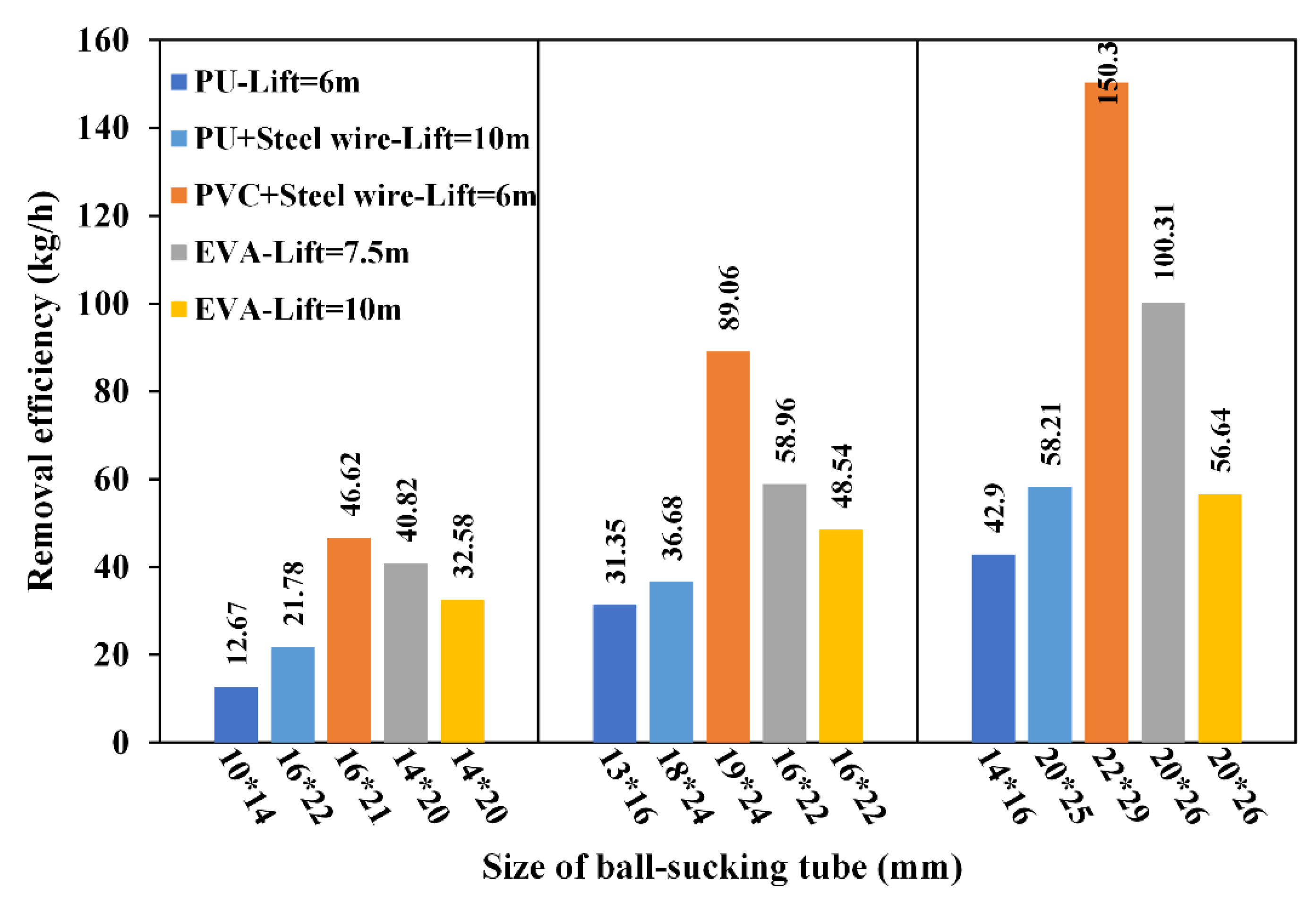
- The lift of pneumatic conveying can reach 10 m and it can realize movement with three degrees of freedom (up and down, left and right, front and back);
- (ii)
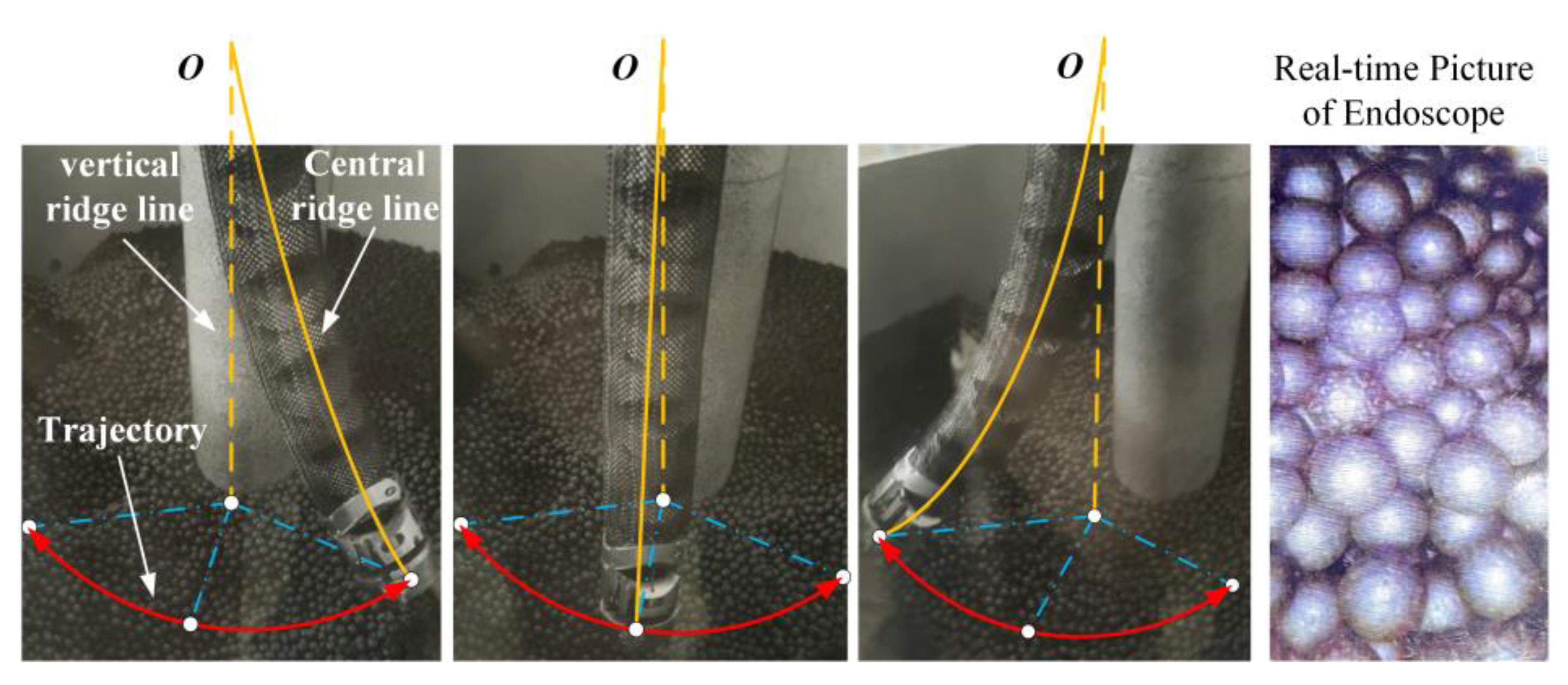
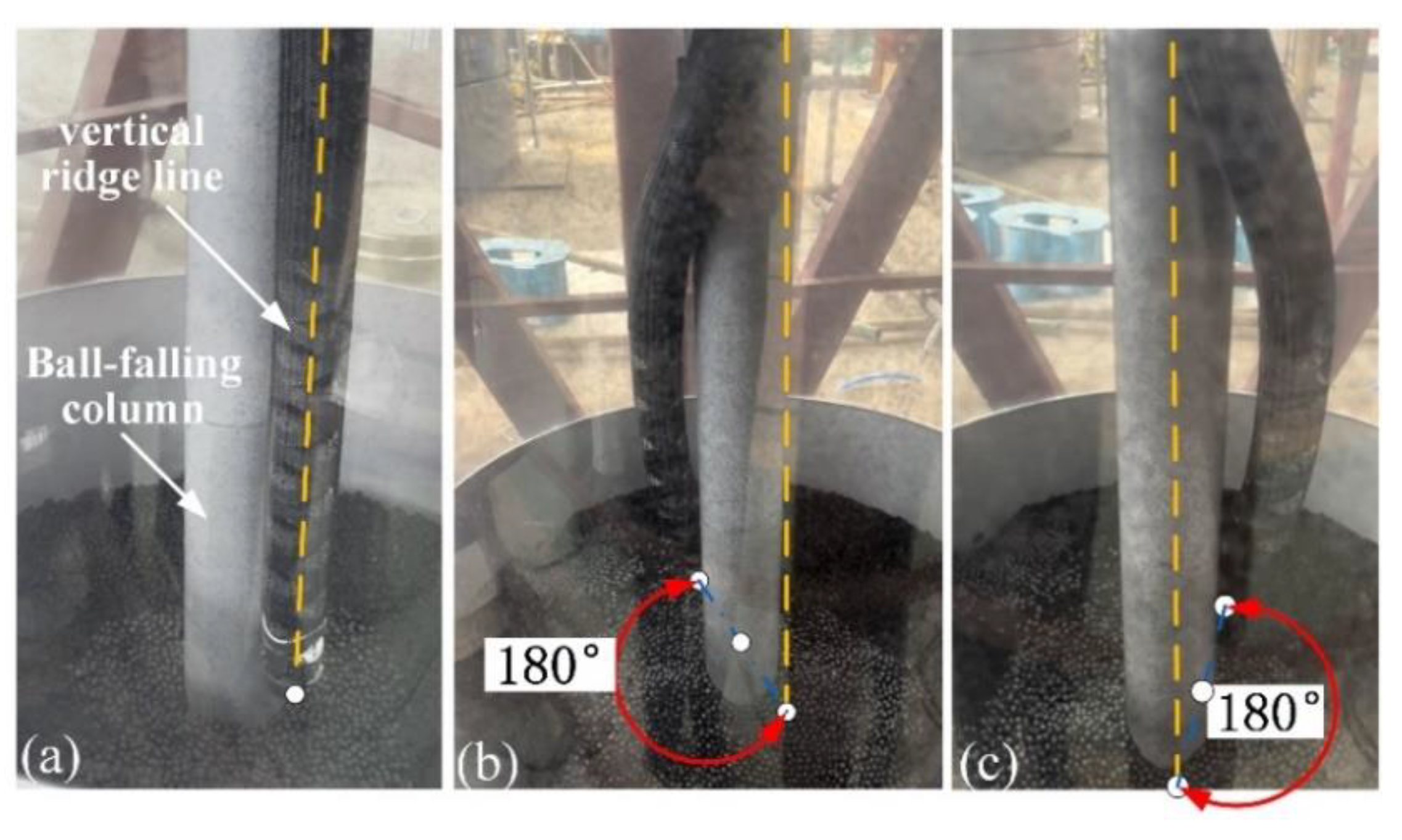
- It can pass through the divider plug and realize 360° movement around the ball-falling column;
- (iii)
- It can realize the function of removing absorber balls and monitor the weight of absorber balls removed;
- (iv)
- The end-effector is equipped with a light and has a visual function, allowing observation of the removal of absorber balls in real time.
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Driving Method | Arm Body Structure | Application Scenarios | Function | Characteristics | Validation Method | |
|---|---|---|---|---|---|---|
| Snake arm maintainer [9] | Cable-driven | Multi-segment structure with multi-joint | Vacuum chamber | Platform with end tools | Principle of layered drive; reverse folding | Computer simulation |
| EMMATM manipulator [27,29] | Cable-driven | Multi-segment structure with multi-joint | Waste Storage Tank | Inspection and remediation | High payload capacity; oversized body | Practical application |
| CT Arm [28] | Cable-driven | Multi-link structure | Nuclear reactor | Maintenance | Coupled drive; connected differential mechanism | Computer simulation |
| KSI tentacle manipulator [30] | Hybrid electric–pneumatic actuation | Multi-segment structure with pneumatic bellows | Nuclear hot cell decontamination | Teleoperated vacuuming and spray washing | Extensibility/retractability in length. | Patented |
| Snake-arm robot (OC Robotics) [31] | Cable-driven | Multi-segment structure with single joint | Nuclear power plant | Inspection and repair operations | The only general purpose continuum robot commercially available | Practical application |
| Proposed robot | Cable-driven | Multi-segment structure with multi-joint | Absorber ball shutdown system | Remove absorber balls | Pneumatic conveying; opposite-bending and feeding | Engineering experiment |
References
- Boustani, E.; Khakshournia, S.; Khalafi, H. A pragmatic approach towards designing a second shutdown system for tehran research reactor. Nucl. Technol. Radiat. Protect. 2016, 31, 28–36. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Dong, Y.; Li, F.; Zhang, Z.; Wang, H.; Huang, X.; Li, H.; Liu, B.; Wu, X.; Wang, H.; et al. The Shandong Shidao Bay 200 MWe High-Temperature Gas-Cooled Reactor Pebble-Bed Module (HTR-PM) Demonstration Power Plant: An Engineering and Technological Innovation. Engineering 2016, 2, 112–118. [Google Scholar] [CrossRef] [Green Version]
- Li, T.J.; Zhang, H.; Kuang, S.B.; Yan, H.; Diao, X.Z.; Huang, Z.Y.; Bo, H.L.; Dong, Y.J. Experimental and numerical study of coarse particle conveying in the small absorber sphere system: Overview and some recent CFD-DEM simulations. Nucl. Eng. Des. 2020, 357, 110420. [Google Scholar] [CrossRef]
- Li, T.; Zhang, H.; Liu, M.; Huang, Z.; Bo, H.; Dong, Y. DEM study of granular discharge rate through a vertical pipe with a bend outlet in small absorber sphere system. Nucl. Eng. Des. 2017, 314, 1–10. [Google Scholar] [CrossRef]
- Trevelyan, J.; Hamel, W.R.; Kang, S.-C. Robotics in hazardous applications. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 1521–1548. [Google Scholar]
- Grazioso, S.; di Gironimo, G.; Siciliano, B. Modeling and vibration control of flexible mechanical systems for DEMO remote maintenance: Results from the FlexARM project. Fusion Eng. Des. 2019, 146, 1423–1425. [Google Scholar] [CrossRef]
- Angrisani, L.; Grazioso, S.; Gironimo, G.D.; Panariello, D.; Tedesco, A. On the use of soft continuum robots for remote measurement tasks in constrained environments: A brief overview of applications. In Proceedings of the 2019 IEEE International Symposium on Measurements & Networking (M&N), Catania, Italy, 8–10 July 2019; pp. 1–5. [Google Scholar]
- Liu, Y.; Yan, Q.; Zhang, Q.; Guo, W.; Odbal; Wu, B.; Wang, Z. Control system design and implementation of flexible multi-joint snake-like robot for inspecting vessel. In Proceedings of the 14th International Conference on Intelligent Autonomous Systems (IAS), Shanghai, China, 3–7 July 2016; pp. 1037–1047. [Google Scholar]
- Qin, G.; Cheng, Y.; Pan, H.; Zhao, W.; Shi, S.; Ji, A.; Wu, H. Systematic design of snake arm maintainer in nuclear industry. Fusion Eng. Des. 2022, 176, 113049. [Google Scholar] [CrossRef]
- Keogh, K.; Kirk, S.; Suder, W.; Farquhar, I.; Tremethick, T.; Loving, A. Laser cutting and welding tools for use in-bore on EU-DEMO service pipes. Fusion Eng. Des. 2018, 136, 461–466. [Google Scholar] [CrossRef] [Green Version]
- Silva Rico, J.A.; Endo, G.; Hirose, S.; Yamada, H. Development of an actuation system based on water jet propulsion for a slim long-reach robot. ROBOMECH J. 2017, 4, 8. [Google Scholar] [CrossRef]
- Robinson, G.; Davies, J.B.C. Continuum robots—A state of the art. In Proceedings of the International Conference on Robotics and Automation (ICRA ‘99), Detroit, MI, USA, 10–15 May 1999; pp. 2849–2854. [Google Scholar]
- Chirikjian, G. Theory and Applications of Hyper-Redundant Robotic Manipulators; California Institute of Technology: Pasadena, CA, USA, 1992. [Google Scholar]
- Buckingham, R.; Graham, A. Snaking around in a nuclear jungle. Ind. Robot. Int. J. 2005, 32, 120–127. [Google Scholar] [CrossRef]
- Axinte, D.; Dong, X.; Palmer, D.; Rushworth, A.; Guzman, S.C.; Olarra, A.; Arizaga, I.; Gomez-Acedo, E.; Txoperena, K.; Pfeiffer, K.; et al. Miror-miniaturized robotic systems for holistic in-situ repair and maintenance works in restrained and hazardous environments. IEEE ASME Trans. Mechatron. 2018, 23, 978–981. [Google Scholar] [CrossRef]
- Dong, X.; Axinte, D.; Palmer, D.; Cobos, S.; Raffles, M.; Rabani, A.; Kell, J. Development of a slender continuum robotic system for on-wing inspection/repair of gas turbine engines. Rob. Comput. Integr. Manuf. 2017, 44, 218–229. [Google Scholar] [CrossRef] [Green Version]
- Qi, F.; Chen, B.; Gao, S.; She, S. Dynamic model and control for a cable-driven continuum manipulator used for minimally invasive surgery. Int. J. Med. Rob. Comput. Assisted Surg. 2021, 17, e2234. [Google Scholar] [CrossRef] [PubMed]
- Zhong, Y.; Hu, L.H.; Xu, Y.S. Recent advances in design and actuation of continuum robots for medical applications. Actuators 2020, 9, 142. [Google Scholar] [CrossRef]
- Kim, Y.; Parada, G.A.; Liu, S.; Zhao, X. Ferromagnetic soft continuum robots. Sci. Rob. 2019, 4, eaax7329. [Google Scholar] [CrossRef] [PubMed]
- Burgner-Kahrs, J.; Rucker, D.C.; Choset, H. Continuum robots for medical applications: A survey. IEEE Trans. Rob. 2015, 31, 1261–1280. [Google Scholar] [CrossRef]
- Nahar, D.; Yanik, P.M.; Walker, I.D. Robot tendrils: Long, thin continuum robots for inspection in space operations. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017. [Google Scholar]
- Liljeback, P.; Mills, R. Eelume: A flexible and subsea resident IMR vehicle. In Proceedings of the Oceans Aberdeen Conference, Aberdeen, UK, 19–22 June 2017. [Google Scholar]
- Lee, K.; Wang, Y.; Zheng, C. Twister hand: Underactuated robotic gripper inspired by origami twisted tower. IEEE Trans. Rob. 2020, 36, 488–500. [Google Scholar] [CrossRef]
- Wang, M.; Dong, X.; Ba, W.; Mohammad, A.; Axinte, D.; Norton, A. Design, modelling and validation of a novel extra slender continuum robot for in-situ inspection and repair in aeroengine. Rob. Comput. Integr. Manuf. 2021, 67, 102054. [Google Scholar] [CrossRef]
- Simaan, N.; Taylor, R.; Flint, P. A dexterous system for laryngeal surgery. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; pp. 351–357. [Google Scholar]
- Chitalia, Y.; Jeong, S.; Yamamoto, K.K.; Chern, J.J.; Desai, J.P. Modeling and control of a 2-dof meso-scale continuum robotic tool for pediatric neurosurgery. IEEE Trans. Rob. 2021, 37, 520–531. [Google Scholar] [CrossRef]
- Bostelman, R.V.; Albus, J.S.; Graham, R.E. Robocrane and EMMA applied to waste storage tank remediation. In Proceedings of the American Nucelar Society Seventh Topical Meeting on Robotics and Remote Systems, Augusta, GA, USA, 27 April–1 May 1997; pp. 708–713. [Google Scholar]
- Ma, S.; Hirose, S.; Yoshinada, H. Development of a hyper-redundant multijoint manipulator for maintenance of nuclear reactors. Adv. Rob. 1994, 9, 281–300. [Google Scholar] [CrossRef]
- Marschke, S.F. West Valley Demonstration Project, Waste Management Area# 3—Closure Alternative I; Environmental Measurements Laboratory (EML): New York, NY, USA, 2000. [Google Scholar] [CrossRef]
- Immega, G.; Antonelli, K. The KSI tentacle manipulator. In Proceedings of the 1995 IEEE International Conference on Robotics and Automation, Nagoya, Japan, 21–27 May 1995; pp. 3149–3154. [Google Scholar] [CrossRef]
- Buckingham, R.; Graham, A. Nuclear snake-arm robots. Ind. Robot. Int. J. 2012, 39, 6–11. [Google Scholar] [CrossRef]
- Buckingham, R.; Chitrakaran, V.; Conkie, R.; Ferguson, G.; Graham, A.; Lazell, A.; Lichon, M.; Parry, N.; Pollard, F.; Kayani, A. Snake-Arm Robots: A New Approach to Aircraft Assembly; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2007. [Google Scholar] [CrossRef]















| Parameter | Symbol | Value |
|---|---|---|
| Total length | L | 3000 mm |
| Length of the distal segment | L1 | 500 mm |
| Length of the proximal segment | L2 | 700 mm |
| Length of the straight column | Ls | 900 mm |
| Joint outer radius | r | 40 mm |
| Joint inner radius | --- | 12.5 mm |
| Joint length | l | 20 mm |
| Number of joints | n | 60 |
| Length–diameter ratio | --- | 75 |
| Test | Suction Fan/W | Lift/m | Material | Size */mm | Time/s |
|---|---|---|---|---|---|
| 1 | 1200 | 6 | PU | 10 *14 | 60 |
| 2 | 13 *16 | 60 | |||
| 3 | 14 *16 | 60 | |||
| 4 | 2200 | 10 | PU + Steel wire | 16 *22 | 60 |
| 5 | 18 *24 | 60 | |||
| 6 | 20 *25 | 60 | |||
| 7 | 2200 | 6 | PVC + Steel wire | 16 *21 | 30 |
| 8 | 19 *24 | 30 | |||
| 9 | 22 *29 | 30 | |||
| 10 | 2200 | 7.5 | EVA (corrugated shape) | 14 *20 | 30 |
| 11 | 16 *22 | 30 | |||
| 12 | 20 *26 | 30 | |||
| 13 | 2200 | 10 | 14 *20 | 30 | |
| 14 | 16 *22 | 30 | |||
| 15 | 20 *26 | 30 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, G.; Yu, J.; Dong, D.; Pan, J.; Wu, H.; Cao, S.; Pei, X.; Huang, X.; Yi, J. Systematic Design of a 3-DOF Dual-Segment Continuum Robot for In Situ Maintenance in Nuclear Power Plants. Machines 2022, 10, 596. https://doi.org/10.3390/machines10070596
Li G, Yu J, Dong D, Pan J, Wu H, Cao S, Pei X, Huang X, Yi J. Systematic Design of a 3-DOF Dual-Segment Continuum Robot for In Situ Maintenance in Nuclear Power Plants. Machines. 2022; 10(7):596. https://doi.org/10.3390/machines10070596
Chicago/Turabian StyleLi, Guoxin, Jingjun Yu, Dailin Dong, Jie Pan, Haoran Wu, Shengge Cao, Xu Pei, Xindong Huang, and Jianqing Yi. 2022. "Systematic Design of a 3-DOF Dual-Segment Continuum Robot for In Situ Maintenance in Nuclear Power Plants" Machines 10, no. 7: 596. https://doi.org/10.3390/machines10070596