
New Mechanical Knee Supporter Device for Shock Absorption


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Concept
3. Development Objectives
- (1)
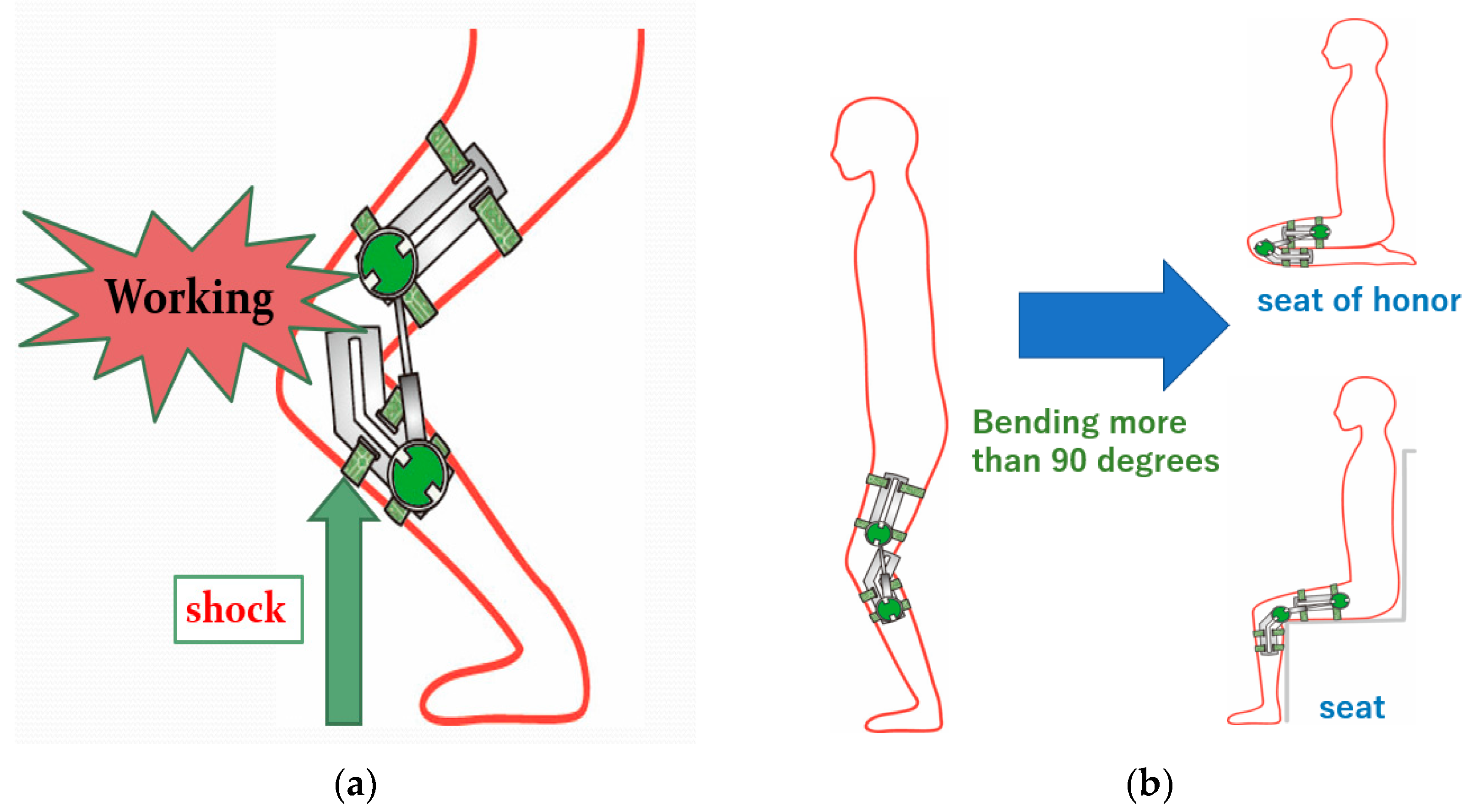
- This product will be activated only when a shock is applied during knee bending, such as when ascending or descending stairs or running. The product does not operate during normal, slow bending of the lower limb. Since the product also does not operate when the knee is extended, stretching exercises can be performed without discomfort. (Figure 2a).
- (2)
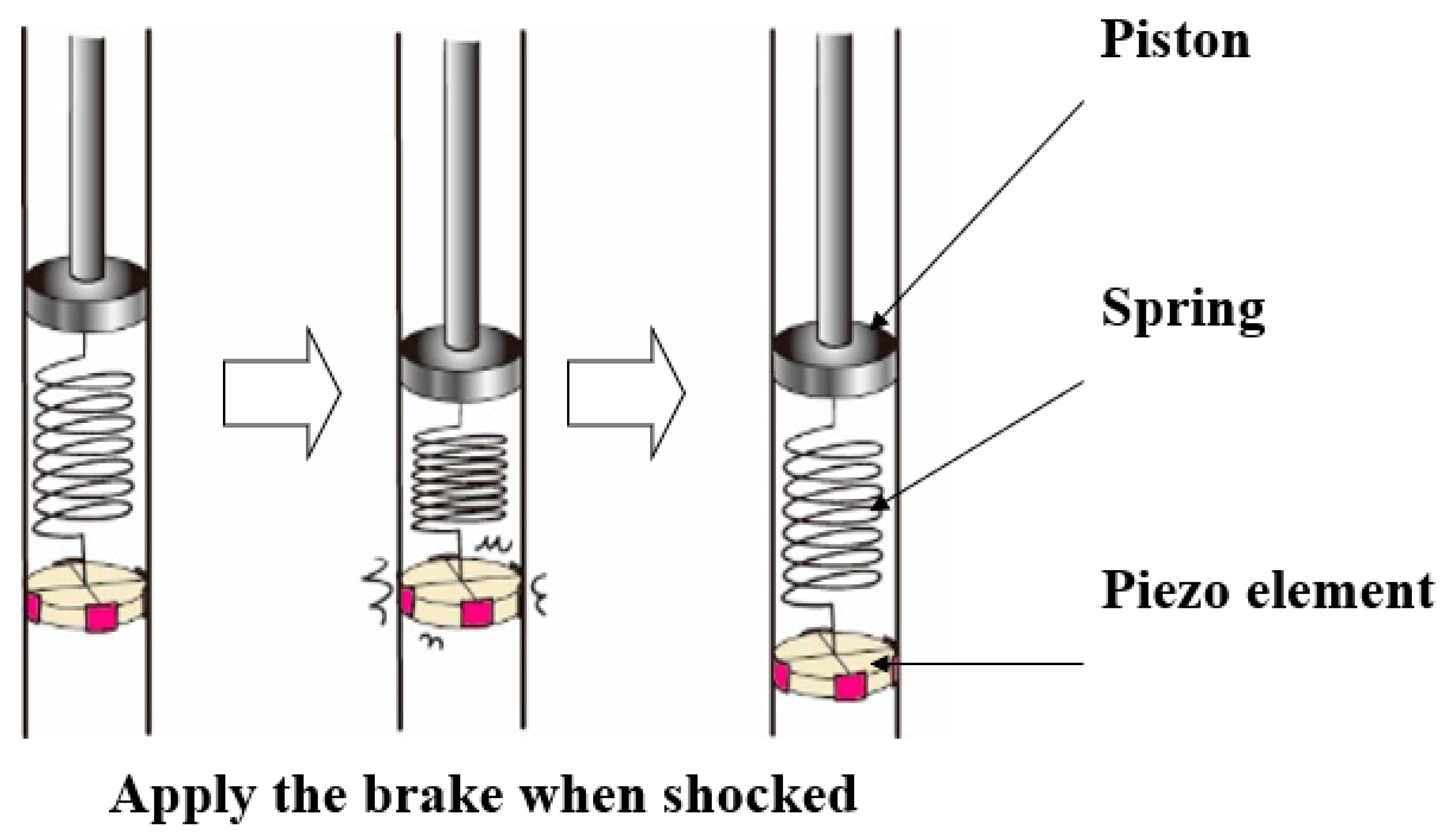
- As a mechanism to absorb sudden load applied to the knee, a spring shall be used for the first large load, and air pressure shall be used for the subsequent loads.
- (3)
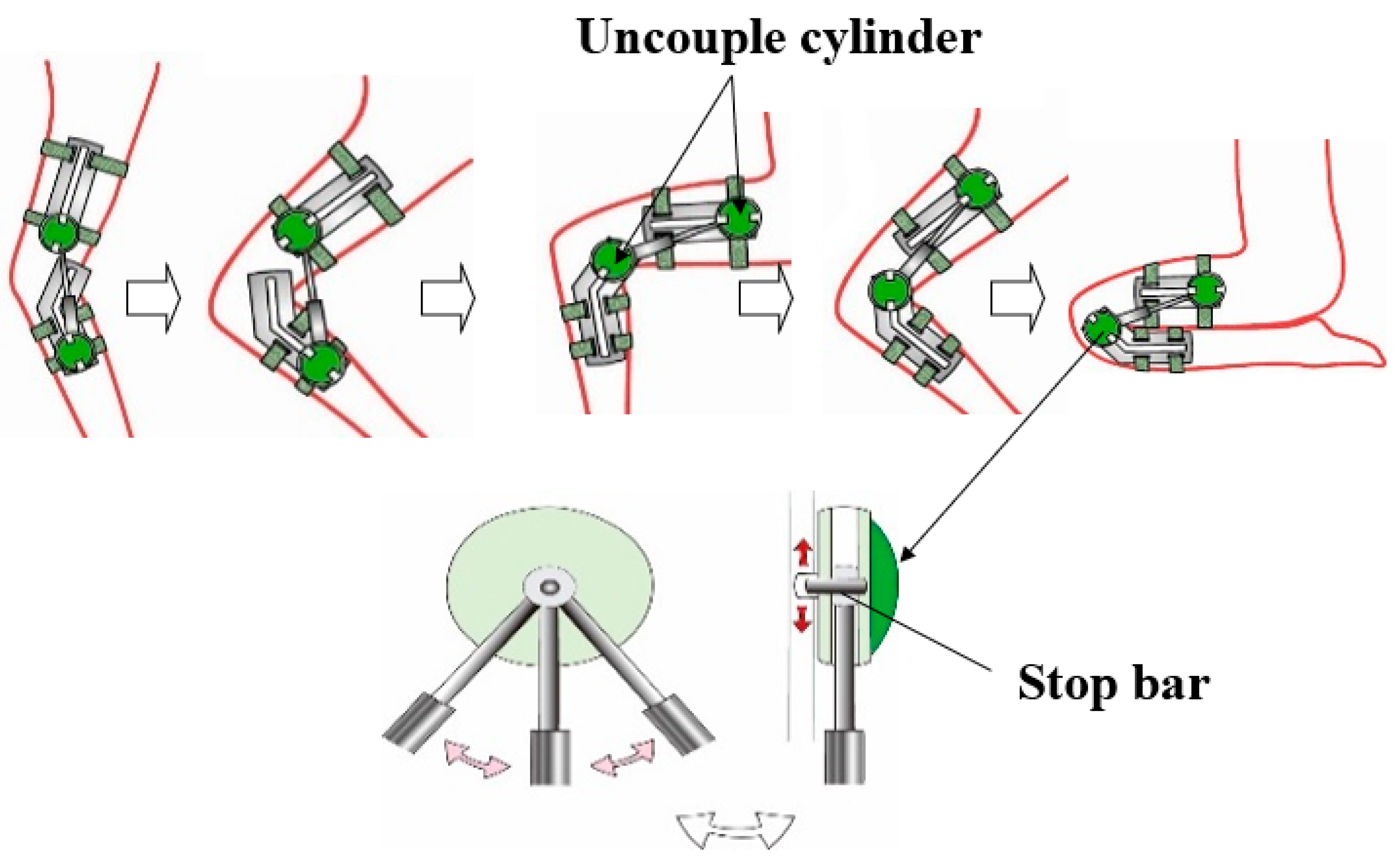
- When the knee is bent more than 90°, the product is retracted, and the user can sit upright. (Figure 2b).
- (4)
- The actuator is operated only for a short period of time compared to those that use a motor all the time, consumes less electricity, and can be operated by a small battery.
4. Shock Mitigation and Absorption Mechanism
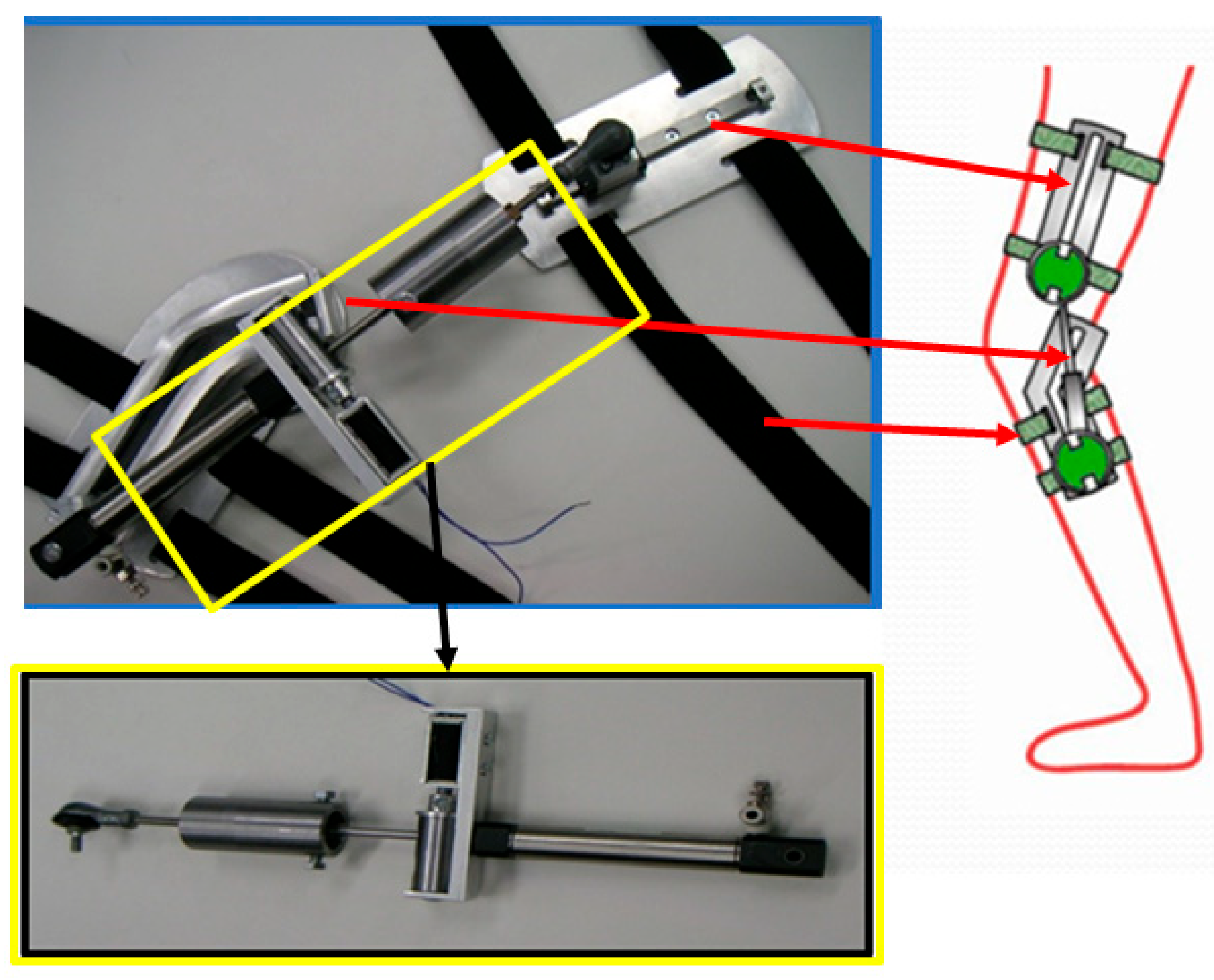
4.1. Cylinder System for Shocks
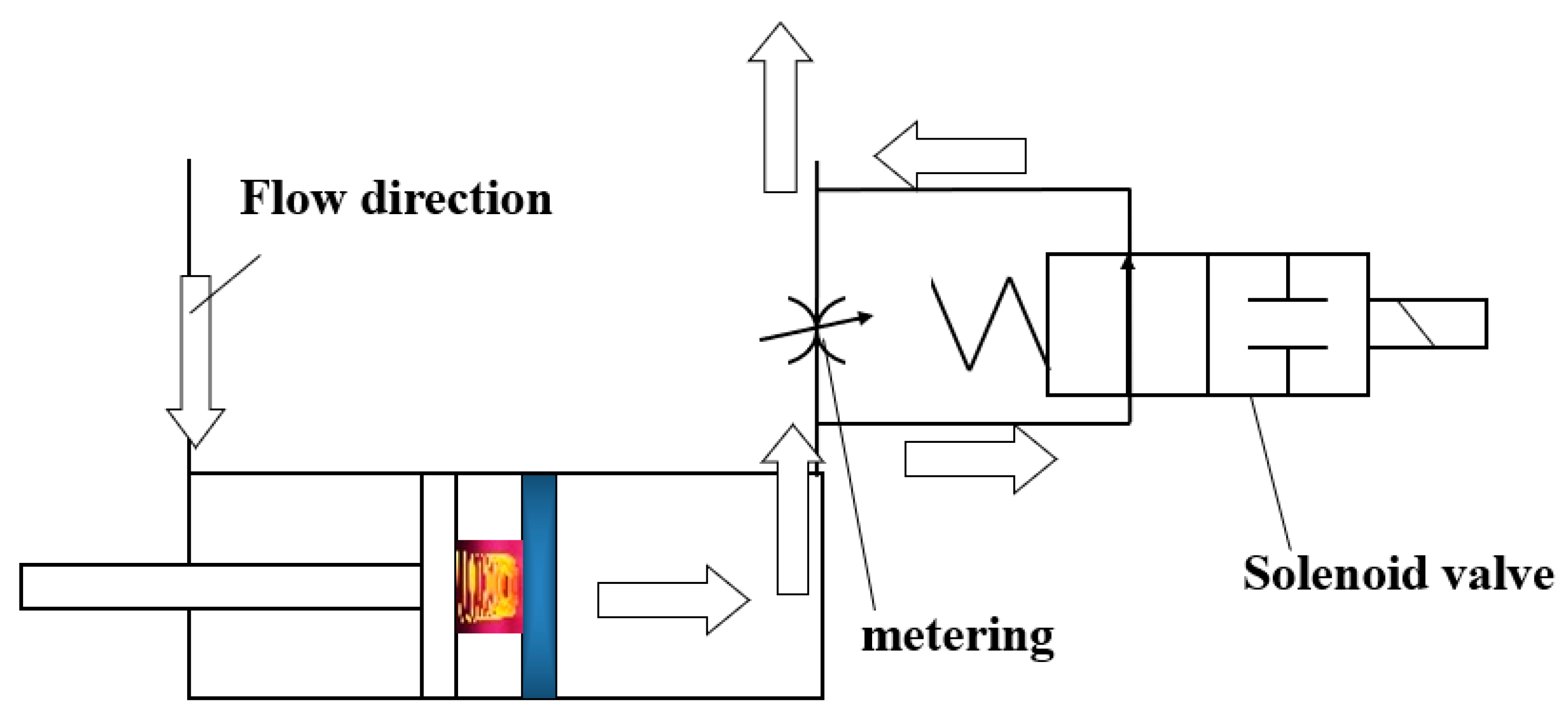
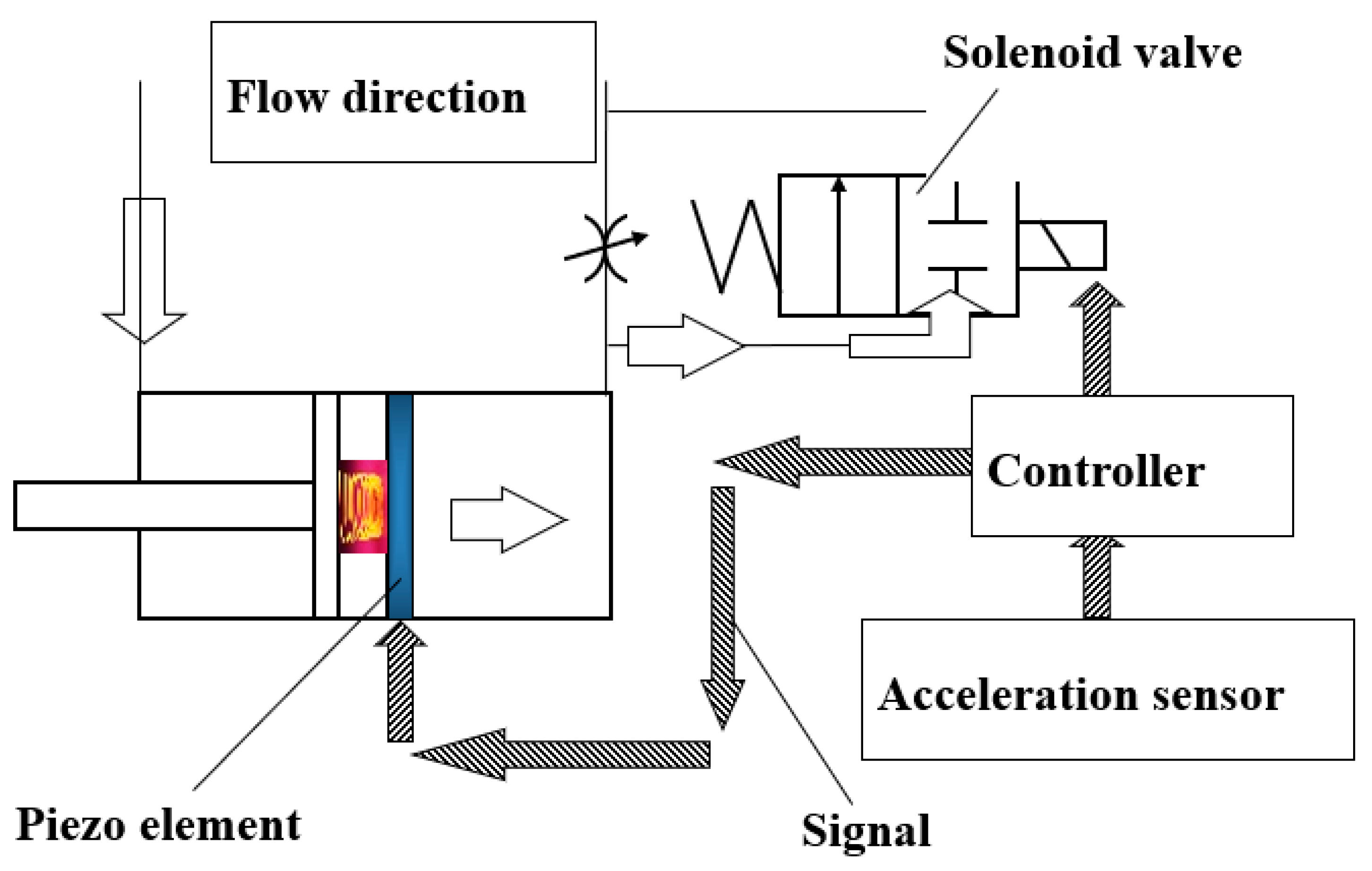
4.2. Pneumatic Circuit
5. Simulation of Cylinder System
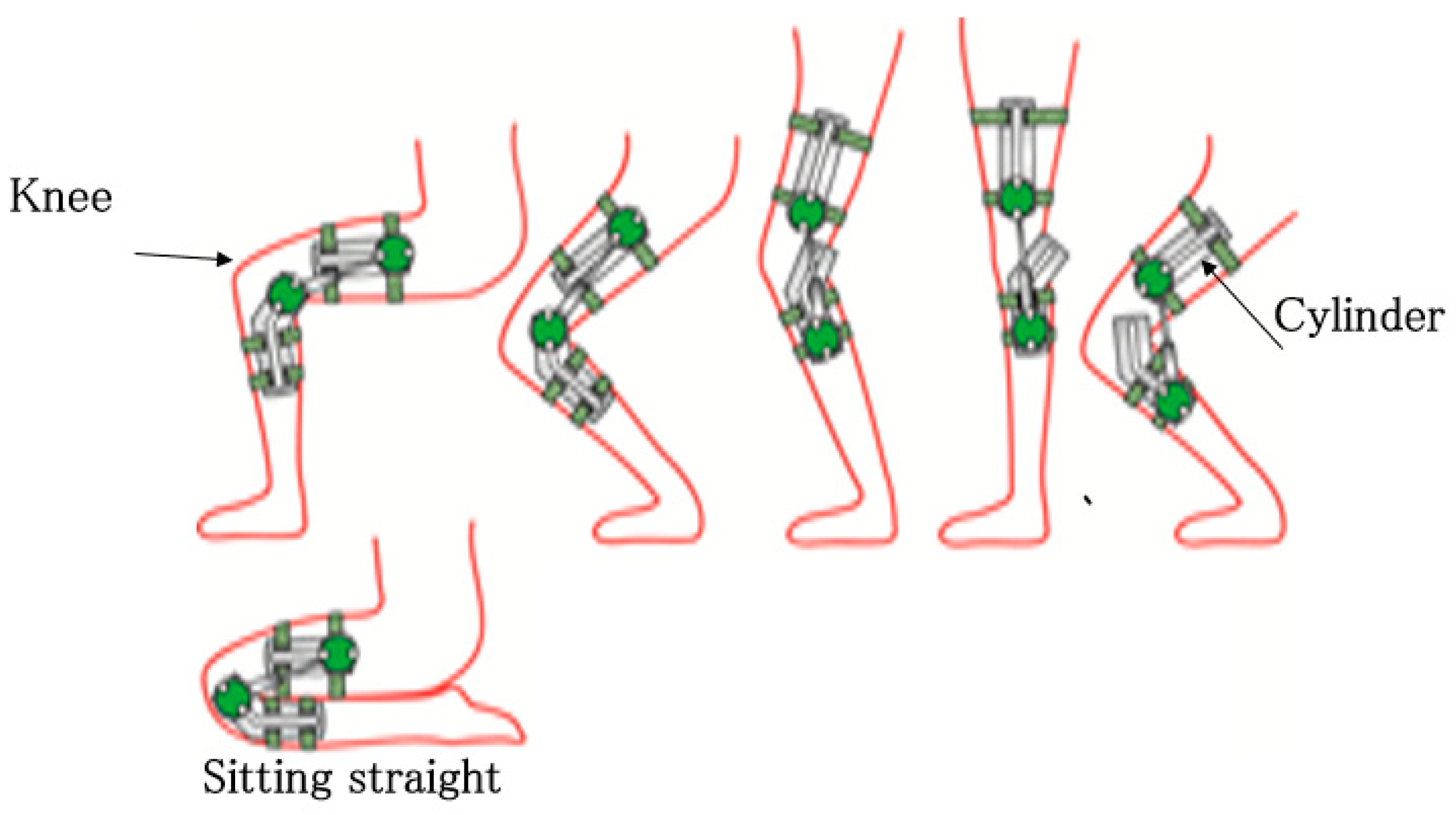
6. Cylinder Slide Mechanism
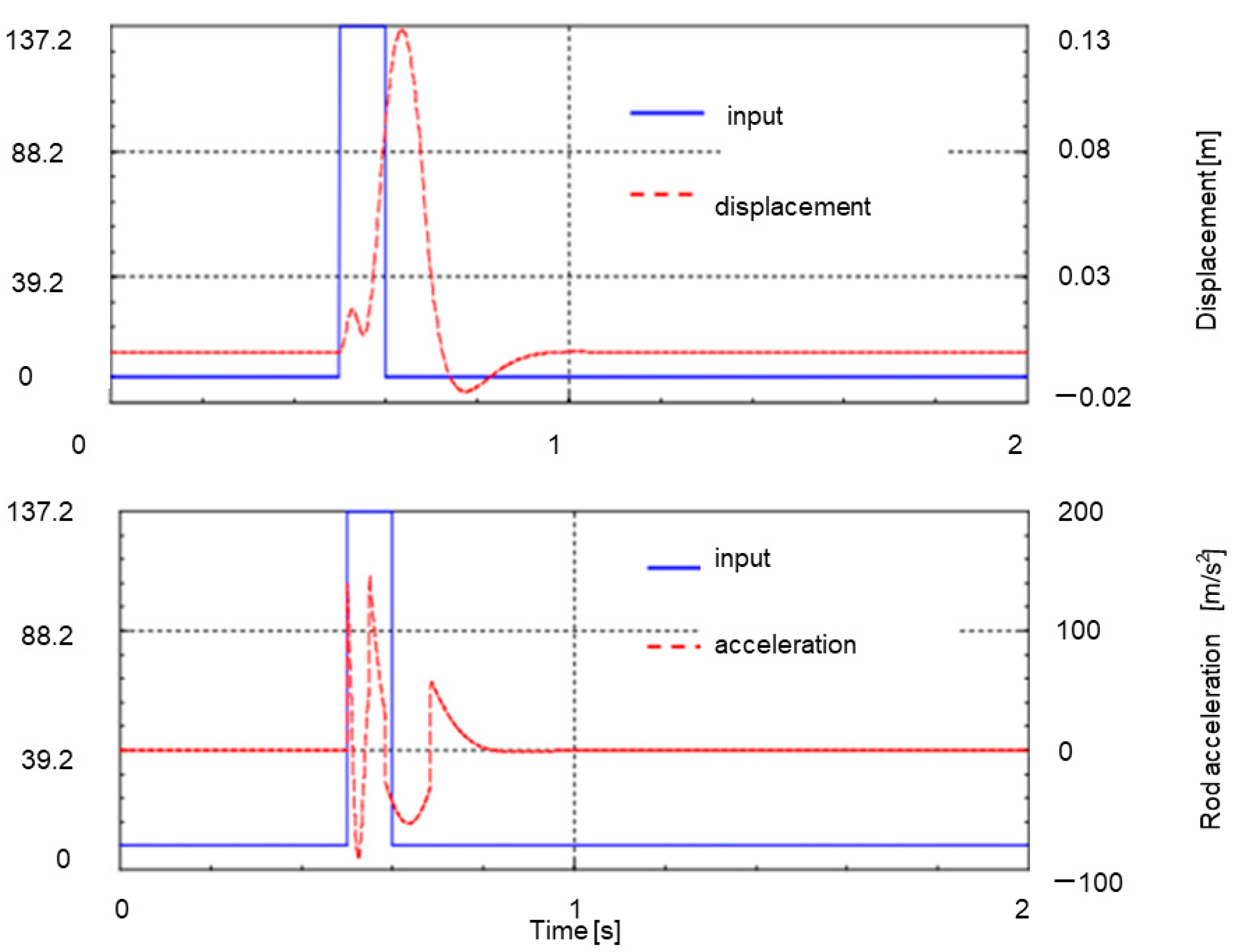
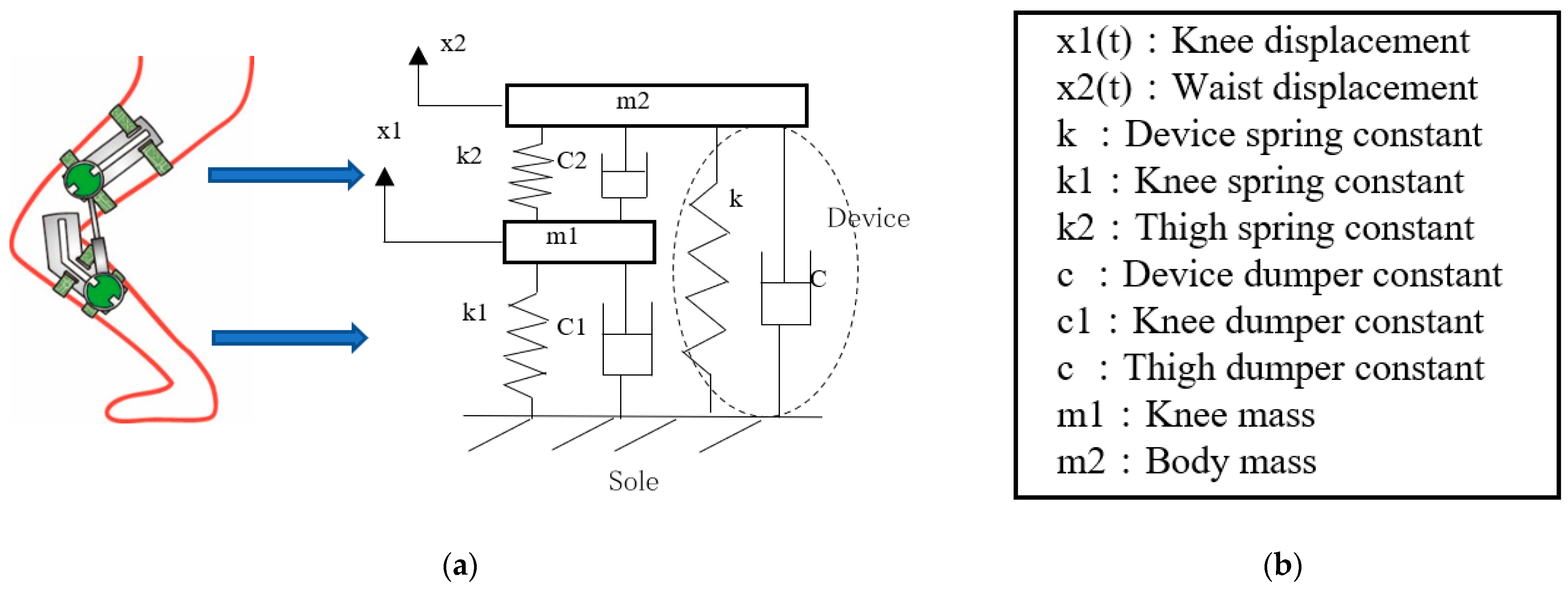
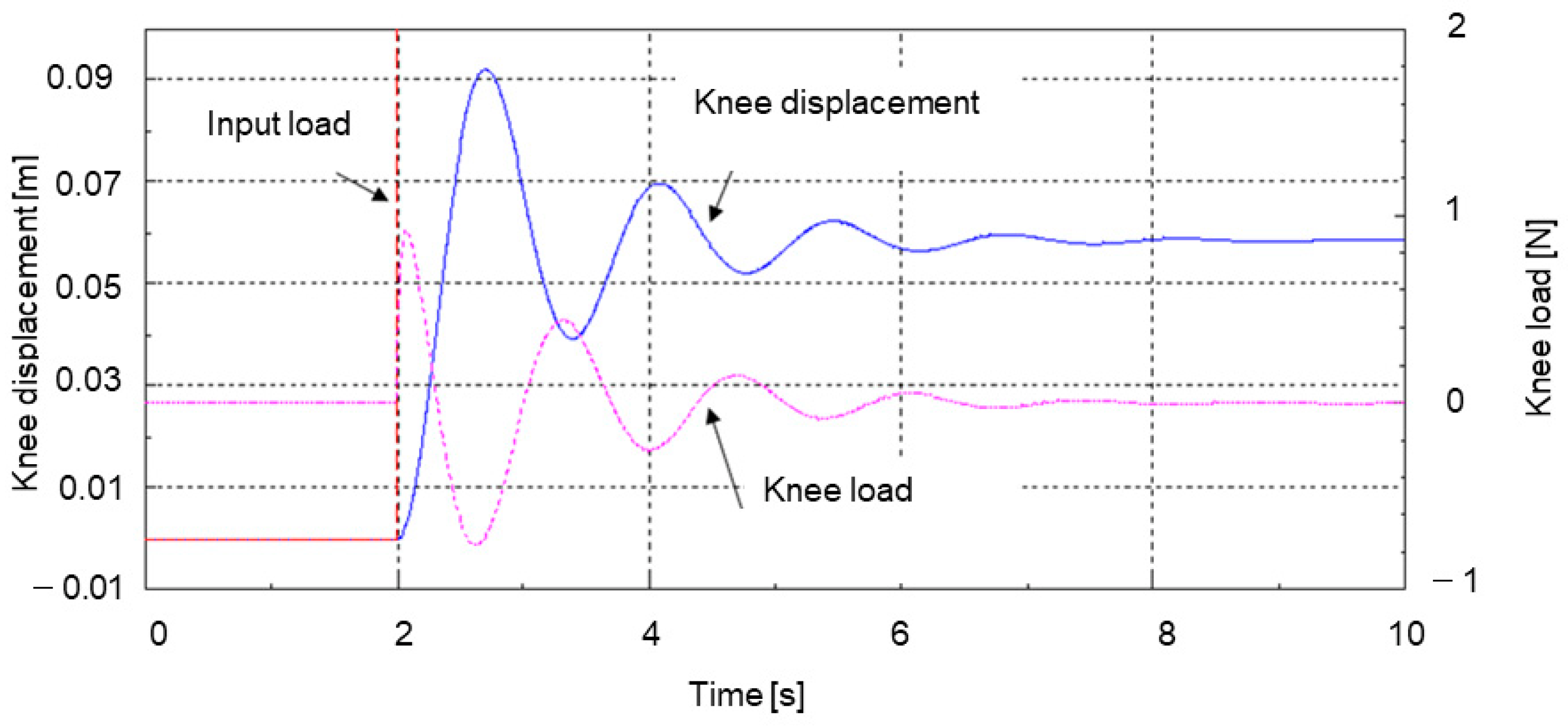
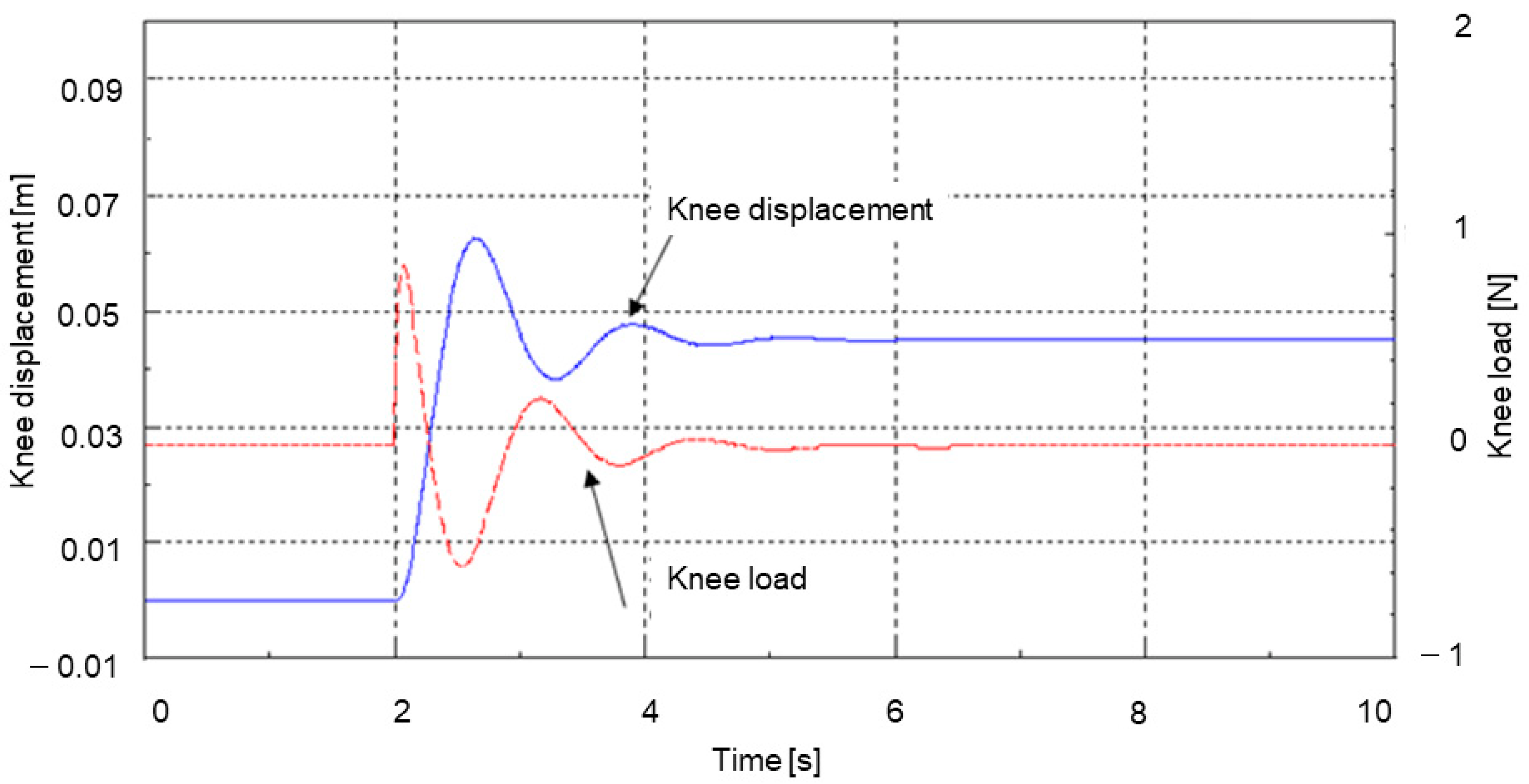
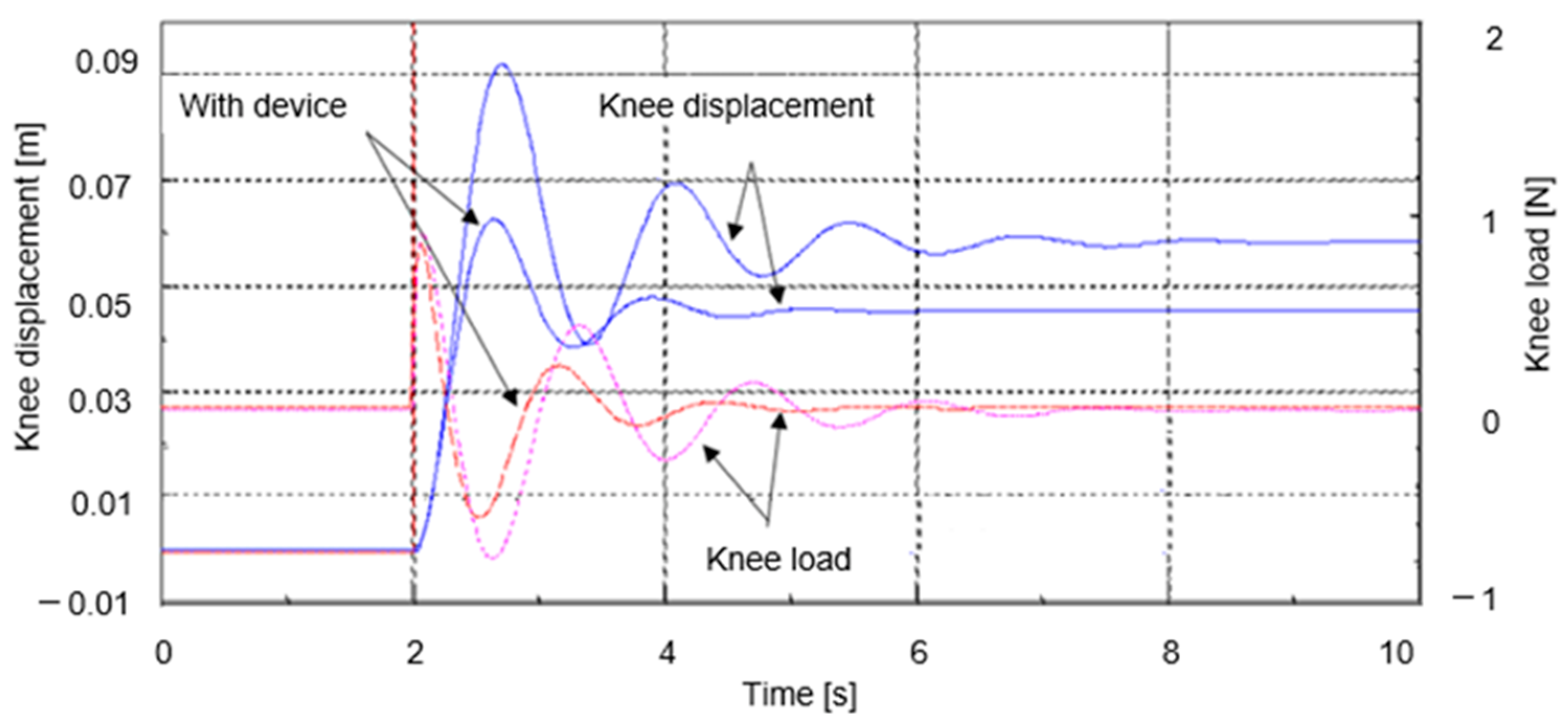
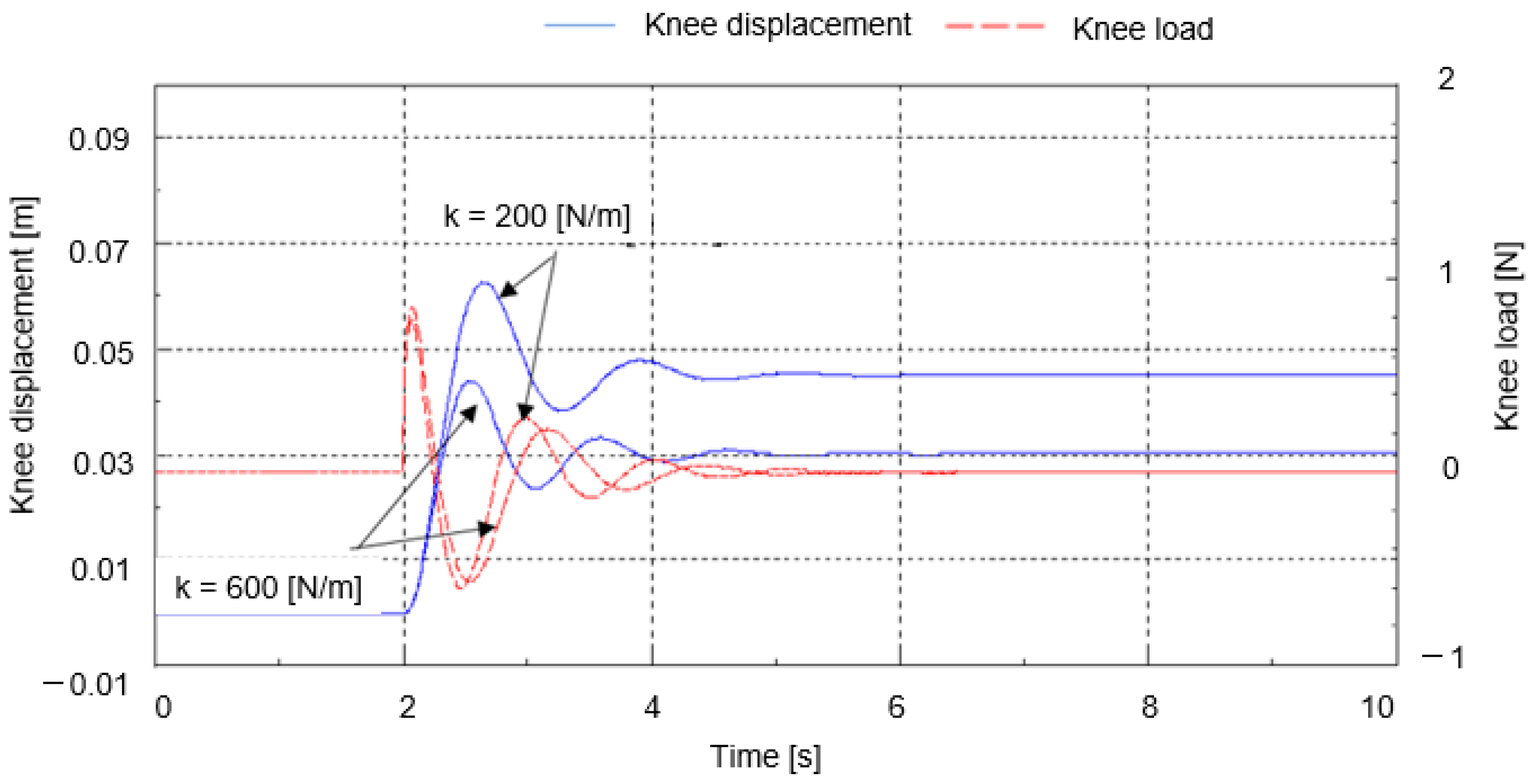
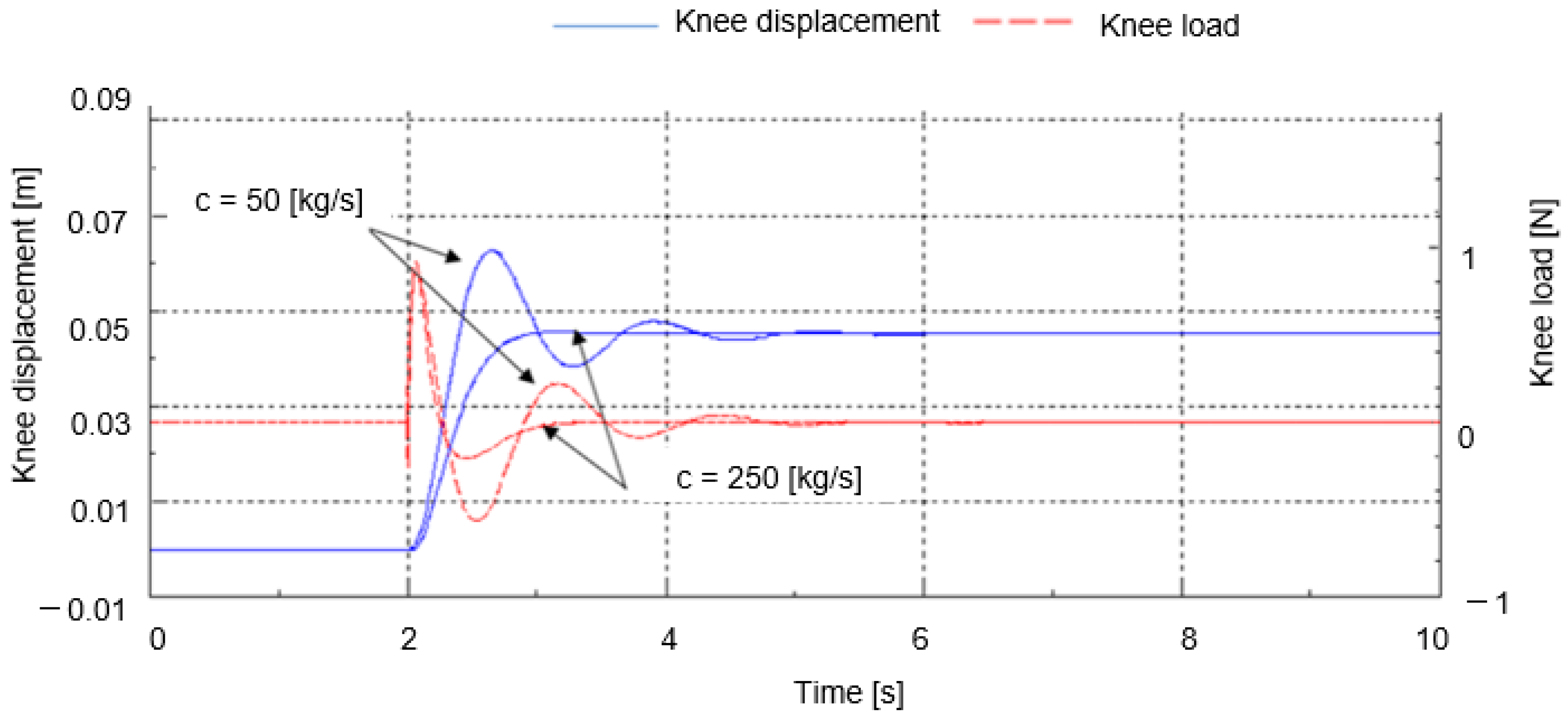
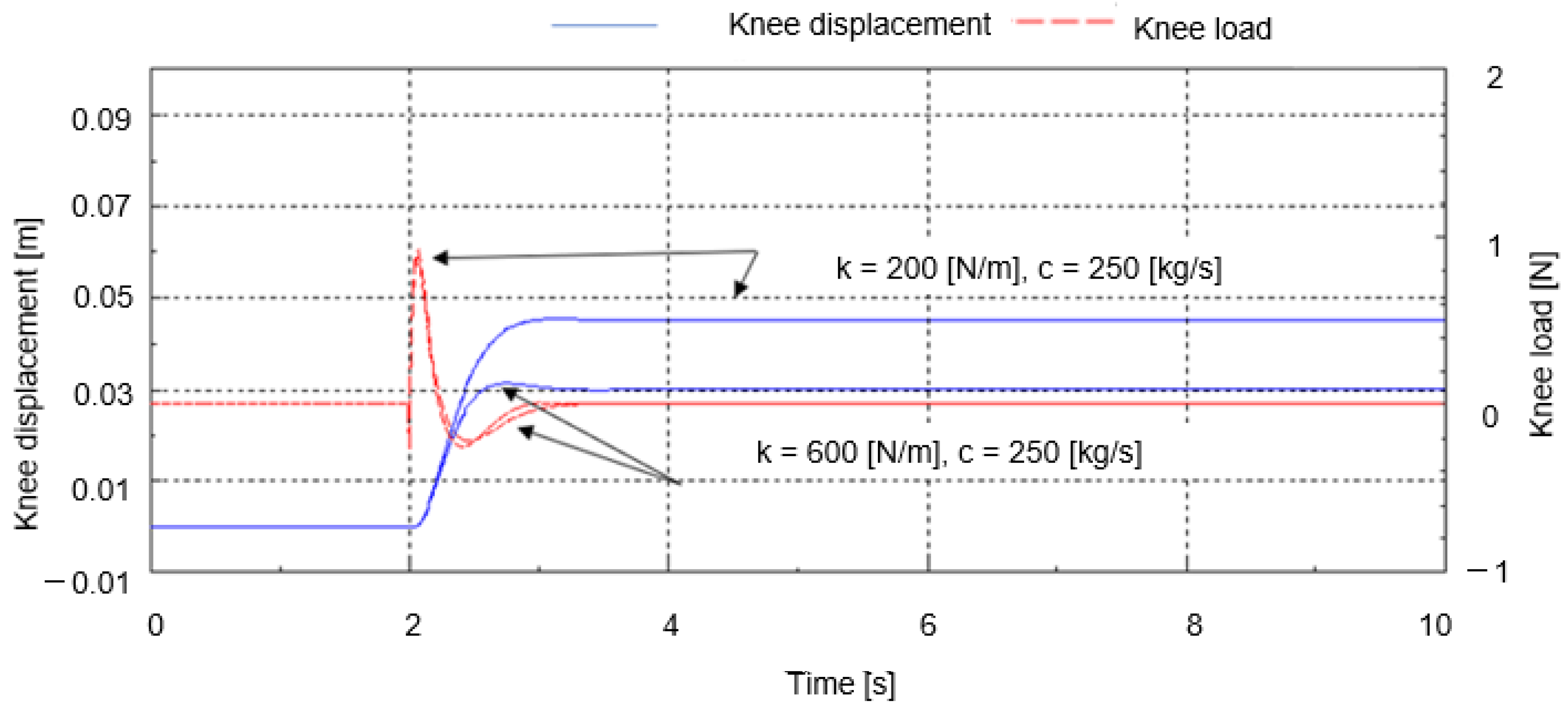
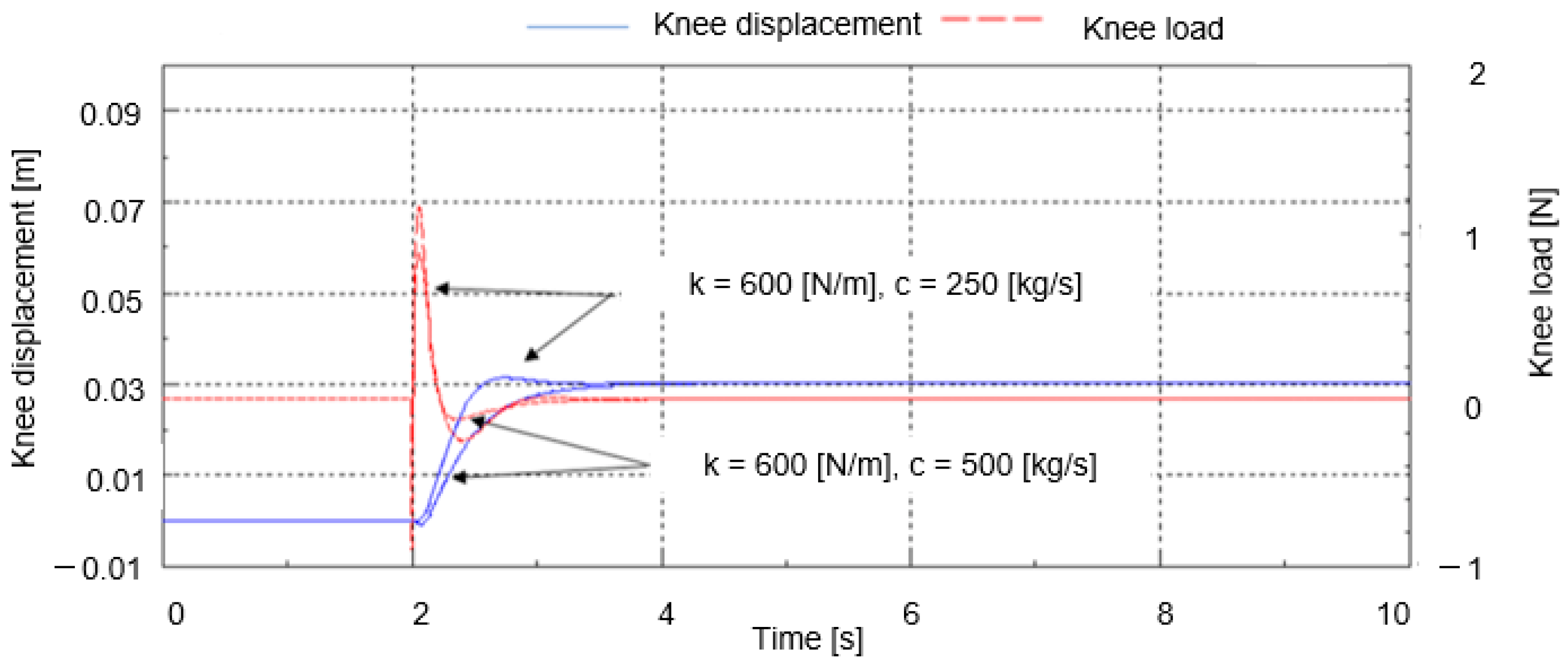
7. Analysis of Dynamic Characteristics of the Device
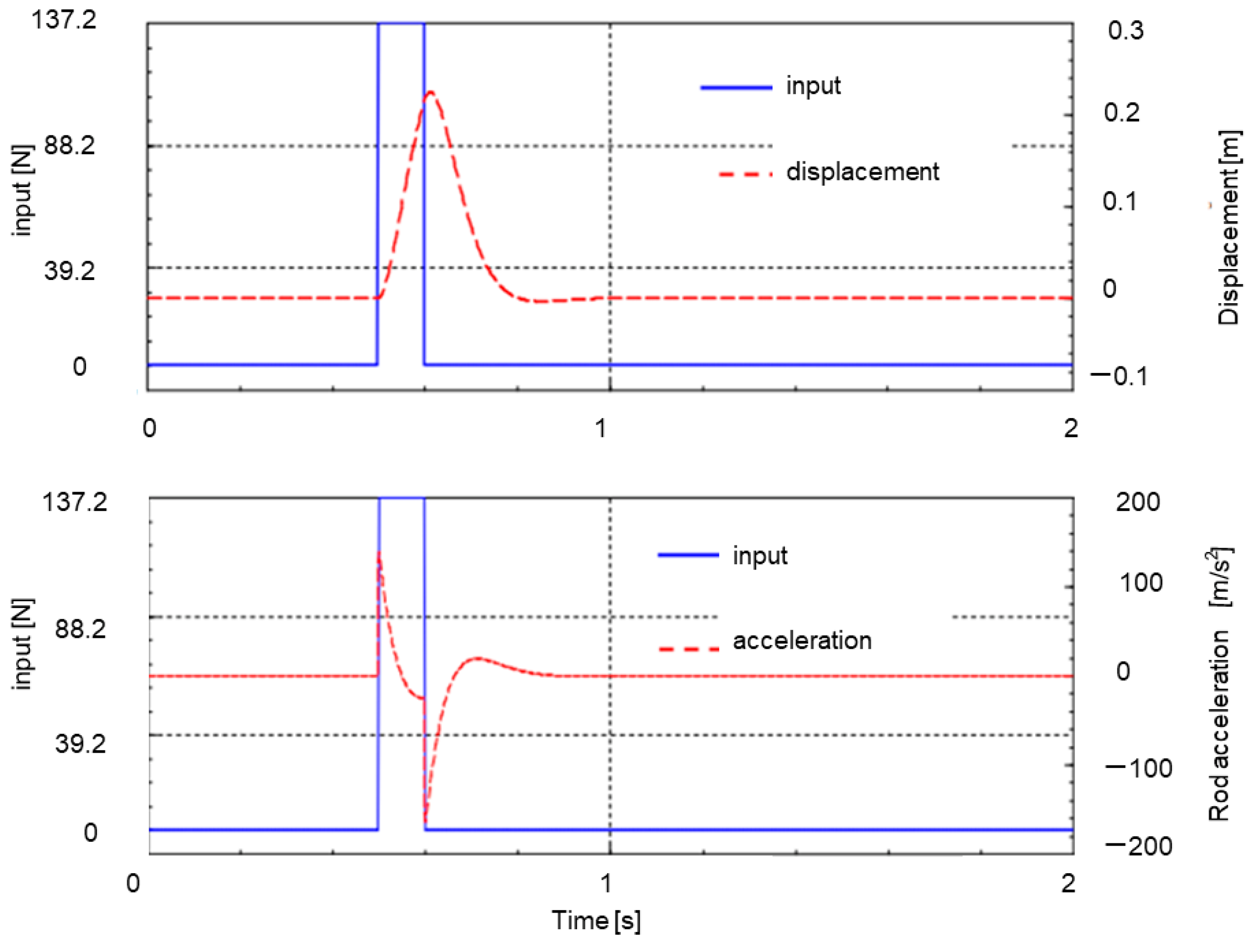
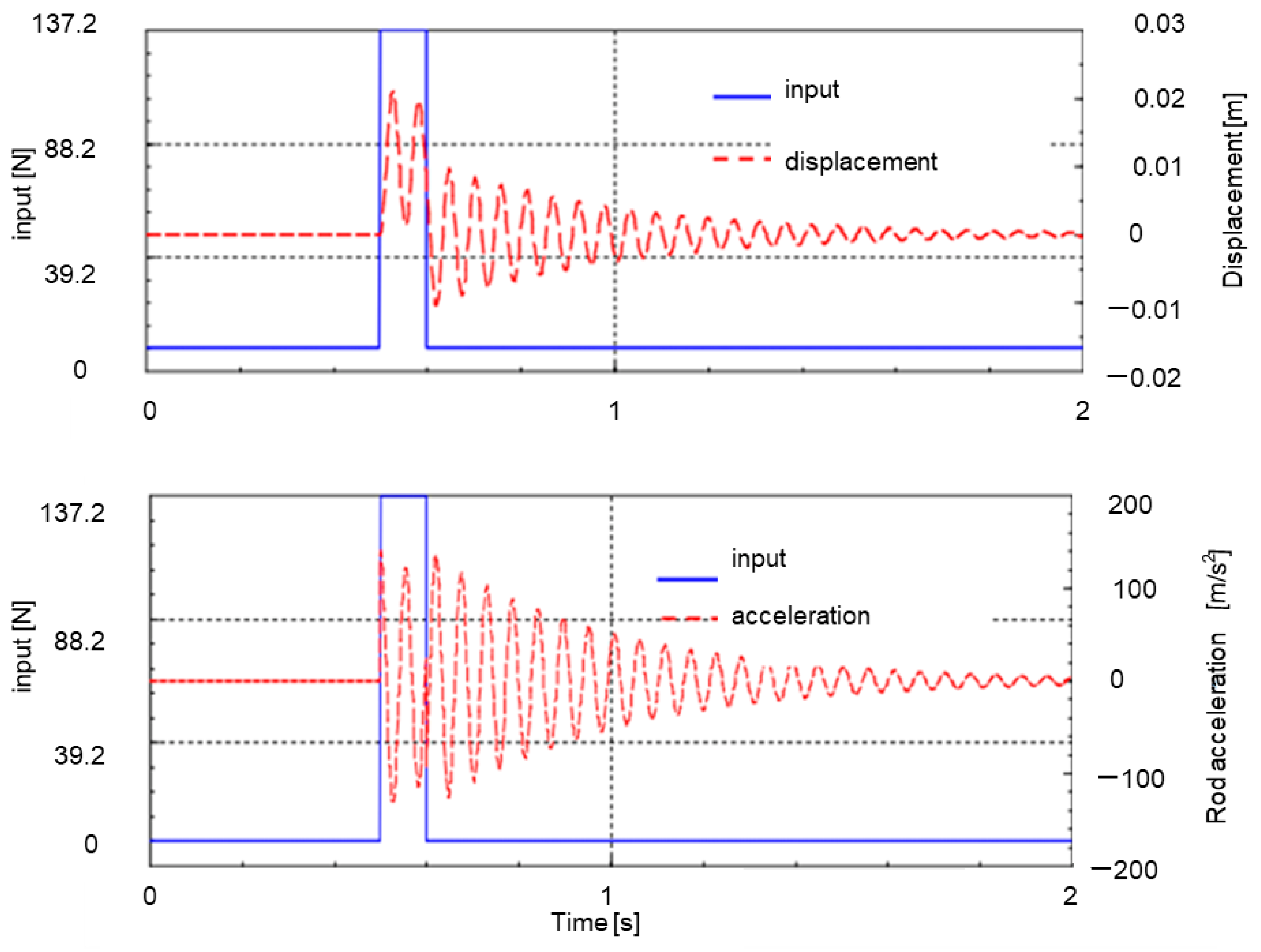
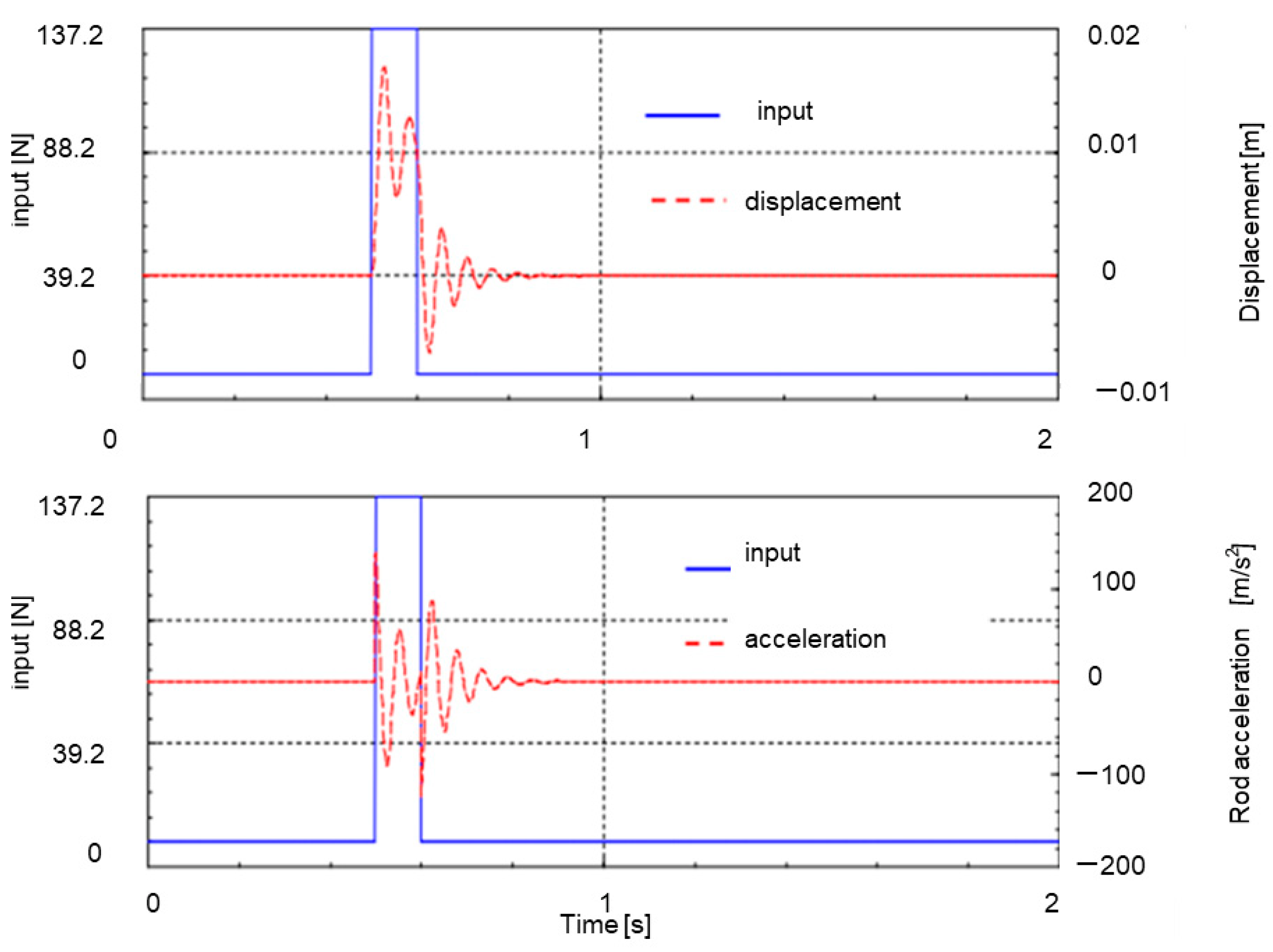
Calculation Results of the Model in the Dynamic Analysis of the Device
8. Discussion
8.1. Toward Practical Application
8.2. Advantages of Pneumatics
8.3. Alternatives to Piezoelectric Elements
8.4. Regarding the Oscillations in the Graphs
8.5. Comparison with Previous Studies
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xiong, Y.; Tao, X. Compression garments for medical therapy and sports. Polymers 2018, 10, 663. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Engel, F.A.; Holmberg, H.C.; Sperlich, B. Is there evidence that runners can benefit from wearing compression clothing? Sports Med. 2016, 46, 1939–1952. [Google Scholar] [CrossRef] [PubMed]
- Ali, A.; Creasy, R.H.; Edge, J.A. The effect of graduated compression stockings on running performance. J. Strength Cond. Res. 2011, 25, 1385–1392. [Google Scholar] [CrossRef]
- Areces, F.; Salinero, J.J.; Abian-Vicen, J.; González-Millán, C.; Ruiz-Vicente, D.; Lara, B.; Lledó, M.; Del Coso, J. The use of compression stockings during a marathon competition to reduce exercise-induced muscle damage: Are they really useful? J. Orthop. Sports Phys. Ther. 2015, 45, 462–470. [Google Scholar] [CrossRef]
- Hill, J.A.; Howatson, G.; van Someren, K.A.; Walshe, I.; Pedlar, C. Influence of compression garments on recovery after marathon running. J. Strength Cond. Res. 2014, 28, 2228–2235. [Google Scholar] [CrossRef]
- Shiraishi, H.; Shiraishi, H. Development and evaluation of new simple mechanisms for shock absorption of the ankle. Forces Mech. 2022, 7, 100095. [Google Scholar] [CrossRef]
- Parkkari, J.; Kujala, U.M.; Kannus, P. Is it possible to prevent sports injuries? Sports Med. 2001, 31, 985–995. [Google Scholar] [CrossRef] [PubMed]
- Micheli, L.J.; Glassman, R.; Klein, M. The prevention of sports injuries in children. Clin. Sports Med. 2000, 19, 821–834. [Google Scholar] [CrossRef]
- Kawamoto, H.; Sankai, Y. Power assist system HAL-3 for gait disorder person. In International Conference on Computers for Handicapped Persons; Springer: Berlin/Heidelberg, Germany, 2002; Volume 15, pp. 196–203. [Google Scholar]
- Kawashima, T. Study on intelligent baby carriage with power assist system and comfortable basket. J. Mech. Sci. Technol. 2009, 23, 974–979. [Google Scholar] [CrossRef]
- Kasaoka, K.; Sankai, Y. Predictive Control Estimating Operator’s Intention for Stepping-Up Motion by Exo-Skeleton Type Power Assist System HAL. In Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. Expanding the Societal Role of Robotics in the the Next Millennium (Cat. No. 01CH37180); IEEE: Maui, HI, USA, 2001; Volume 3, pp. 1578–1583. [Google Scholar]
- Zhang, L.; Song, G.; Zou, C.; Huang, R.; Cheng, H.; Hu, D. Trajectory Modulation for Impact Reducing of Lower-Limb Exoskeletons. Micromachines 2022, 13, 816. [Google Scholar] [CrossRef] [PubMed]
- Yue, H.; Mombaur, K. Analysis of human leg joints compliance in different walking scenarios with an optimal control approach. IFAC Int. Workshop Period. Control. Syst. 2016, 49, 99–106. [Google Scholar]
- Seyfarth, A.; Lipfert, S.; Rummel, J.; Maus, M.; Maykranz, D. Walking and Running: How Leg Compliance Shapes the Way We Move. In Modeling, Simulation and Optimization of Bipedal Walking; Springer: Berlin/Heidelberg, Germany, 2013; pp. 211–222. [Google Scholar]
- Gard, S.A.; Childress, D.S. The effect of pelvic list on the vertical displacement of the trunk during normal walking. Gait Posture 1997, 5, 233–238. [Google Scholar] [CrossRef]
- Russell, F.; Takeda, Y.; Kormushev, P.; Vaidyanathan, R.; Ellison, P. Stiffness Modulation in a Humanoid Robotic Leg and Knee. IEEE Robot. Autom. Lett. 2021, 6, 2563–2570. [Google Scholar] [CrossRef]
- Liu, N.W. The effect of muscle stiffness and damping on simulated impact force peaks during running. J. Biomech. 1999, 32, 849–856. [Google Scholar]
- Koyama, K.; Umezawa, J.; Kurihara, T.; Naito, H.; Yanagiya, T. The Influence of Position and Area of Shock Absorbing Material of Shoes on Ground Reaction Force during Walking. IFMBE Proc. 2010, 31, 262–265. [Google Scholar]
- Ueda, J.; Turkseven, M.; Kim, E.; Lowery, Q.; Mayo, M. Shock Absorbing Exoskeleton for VERTICAL mobility System: Concept and Feasibility Study. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 3342–3349. [Google Scholar]
- Park, J.; Lee, D.; Park, K.; Kong, K. Reduction of Ground Impact of a Powered Exoskeleton by Shock Absorption Mechanism on the Shank. In Proceedings of the 2021 International Conference on Robotics and Automation (ICRA), Xian, China, 30 May–5 June 2021; pp. 2085–2090. [Google Scholar]




















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shiraishi, H.; Shiraishi, H. New Mechanical Knee Supporter Device for Shock Absorption. Machines 2022, 10, 574. https://doi.org/10.3390/machines10070574
Shiraishi H, Shiraishi H. New Mechanical Knee Supporter Device for Shock Absorption. Machines. 2022; 10(7):574. https://doi.org/10.3390/machines10070574
Chicago/Turabian StyleShiraishi, Hajime, and Haruhiro Shiraishi. 2022. "New Mechanical Knee Supporter Device for Shock Absorption" Machines 10, no. 7: 574. https://doi.org/10.3390/machines10070574