
A Review of Key Technologies for Friction Nonlinearity in an Electro-Hydraulic Servo System


Abstract
:1. Introduction
2. Friction Characteristics
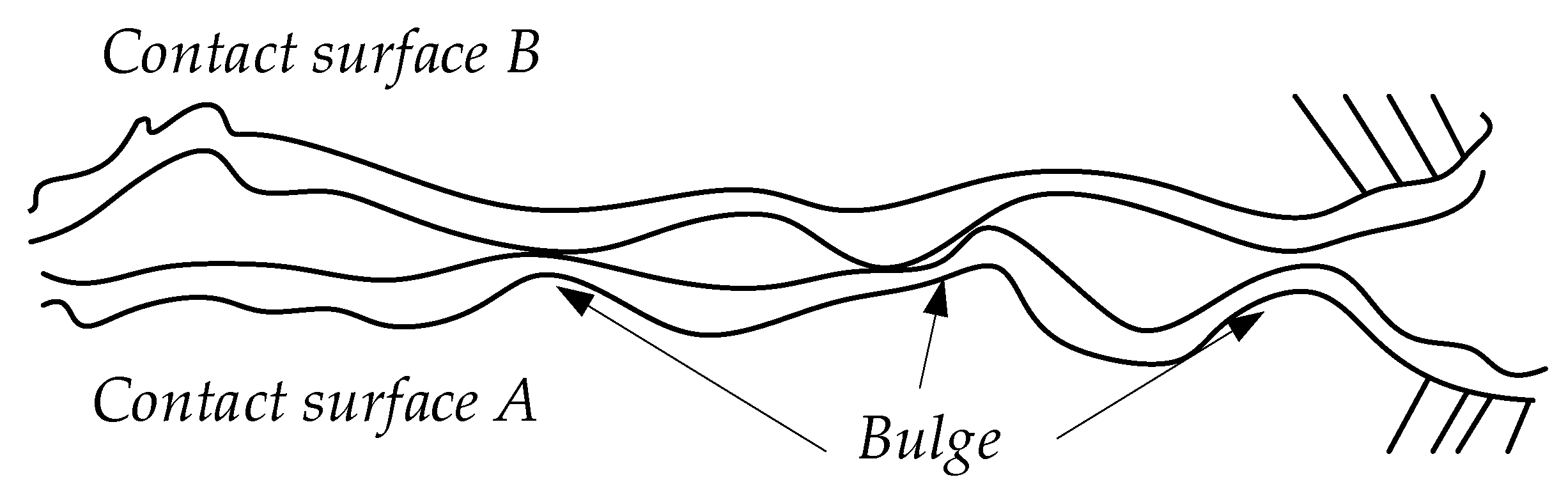
2.1. Causes of Friction
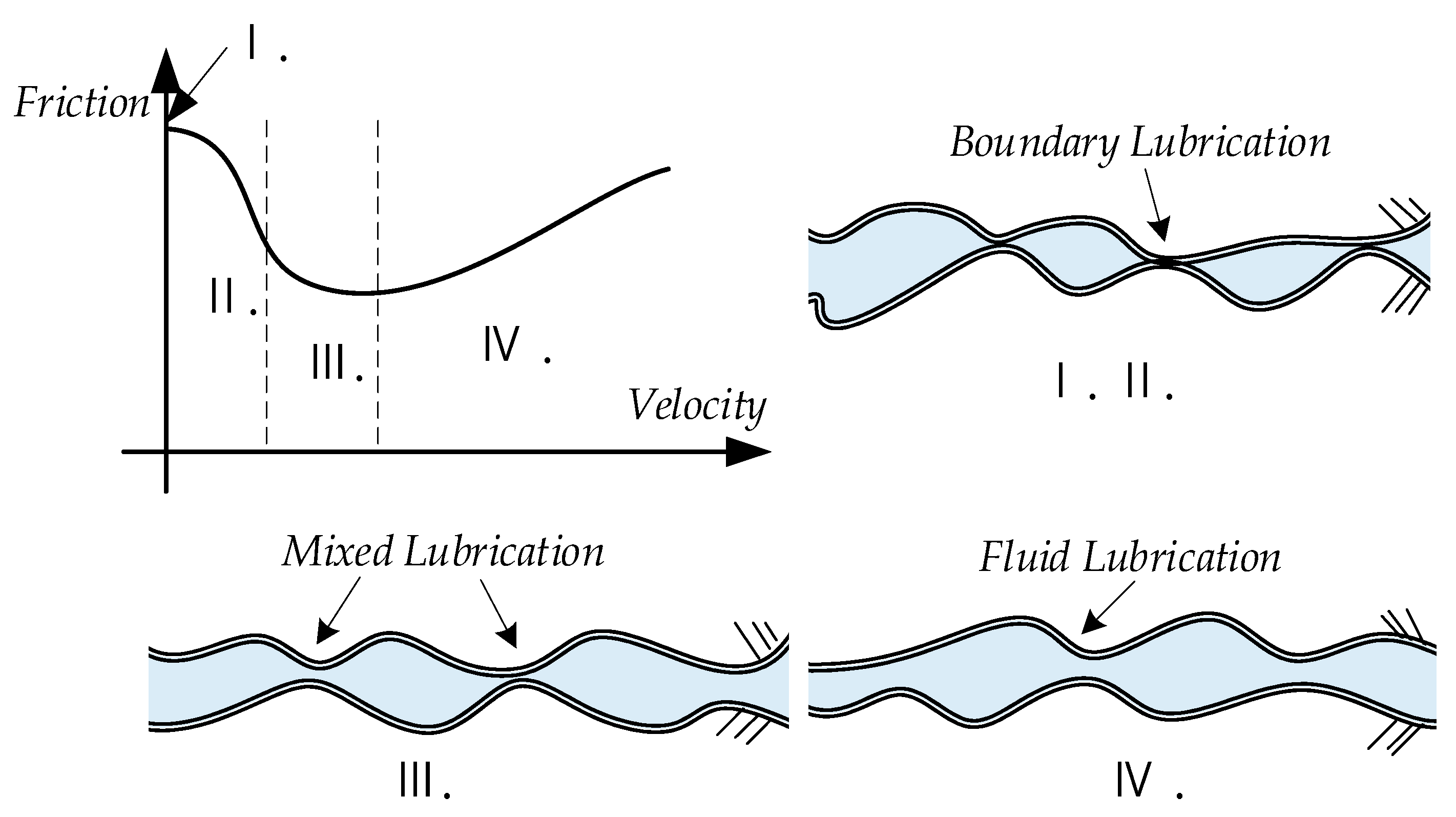
2.2. Static Characteristics of Friction
2.3. Dynamic Characteristics of Friction
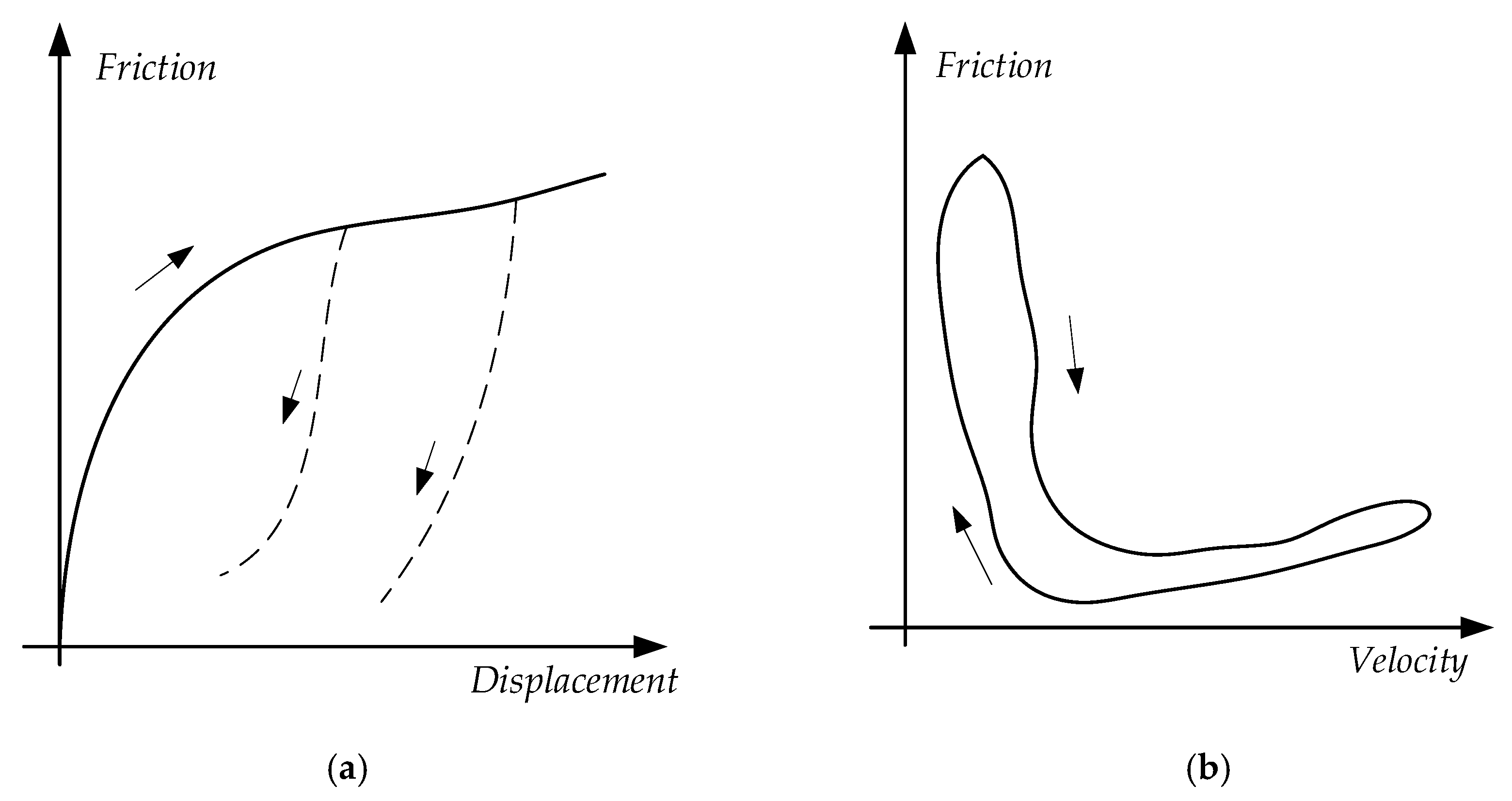
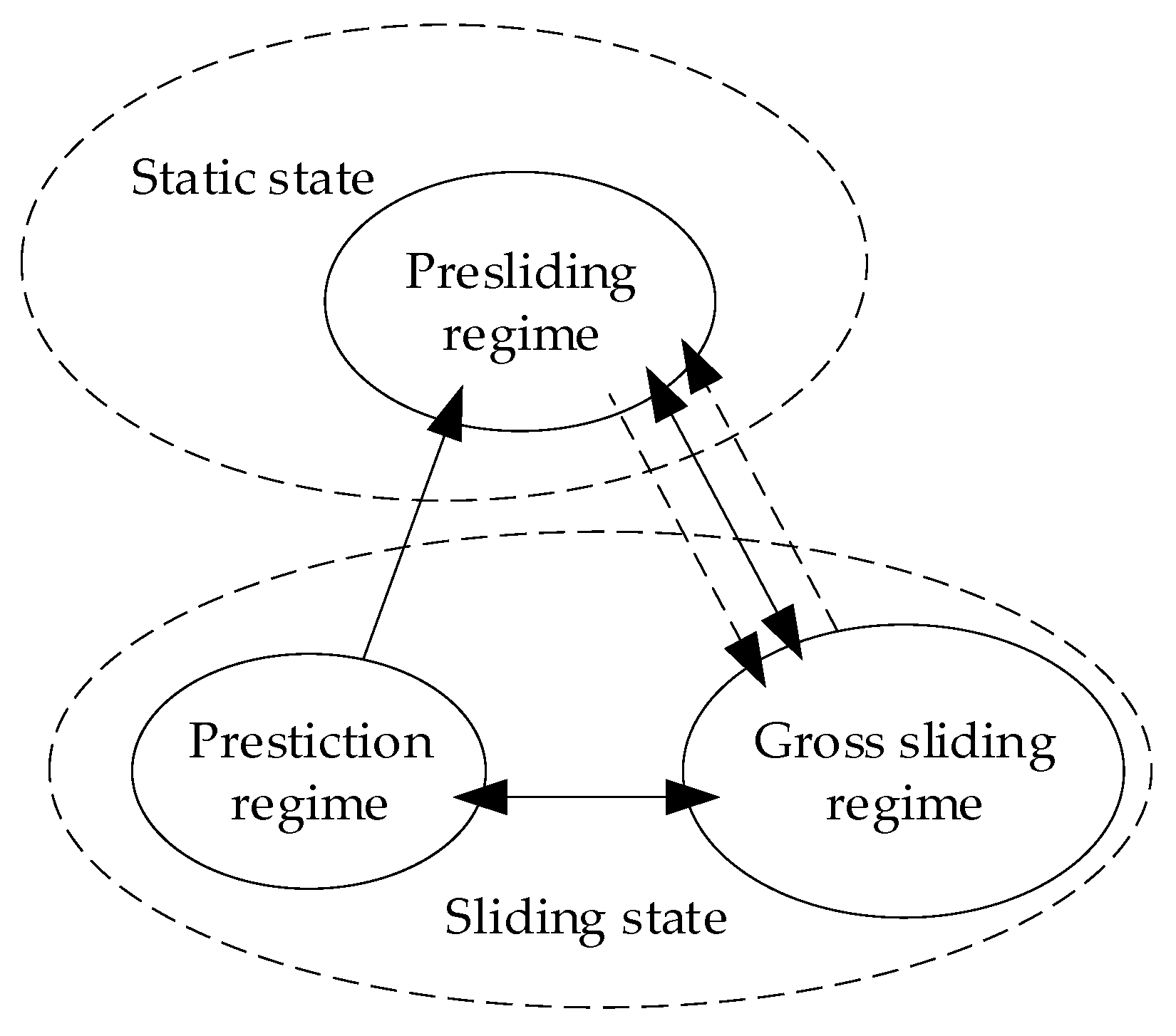
2.3.1. Pre-Sliding Displacement
2.3.2. Friction Hysteresis
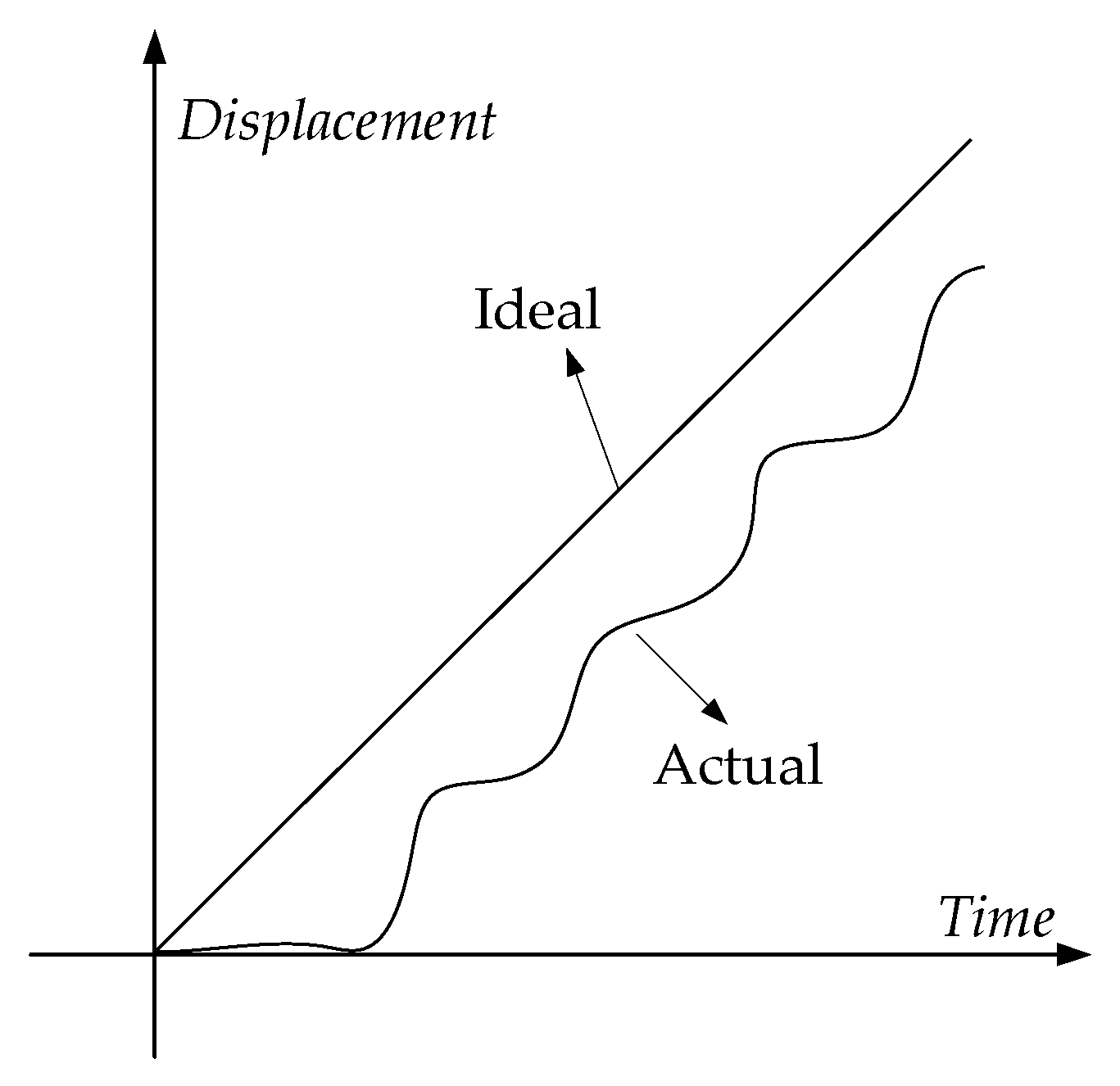
2.3.3. Crawling Phenomenon
2.3.4. Variable Static Friction
3. Friction Model and Its Identification Strategy
3.1. Friction Model
3.2. Friction Model Identification Algorithm
3.2.1. Classical Identification Methods
- Least squares parameter estimation method.
- 2.
- Parameter estimation method for experimental data.
3.2.2. Intelligent Identification Method
- Neural network identification method.
- 2.
- Metaheuristics

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Title | Advantage | Disadvantage | Common Areas |
|---|---|---|---|
| Evolutionary Algorithms (EA) [46,51,52,53,60] | Group and expandability. | Programming is complex and its parameter dependence is high. | Neural networks, data mining, parameter estimation, etc. |
| Particle Swarm Optimization (PSO) [45,57] | Memory, fast search speed, few parameters, simple structure, etc. | The optimization speed is slow, the convergence accuracy is not high, and the optimization results fluctuate significantly. | Function optimization, neural network training, stochastic optimization problems, etc. |
| Artificial Fish Swarm Algorithm (AFSA) [56] | The requirements for the properties of the objective function and parameter settings are low. | The structure is complex, the optimization speed is slow, and the convergence accuracy is low. | Job shop scheduling, function optimization. |
| Fireworks Algorithm (FWA) [54] | The structure is simple, there are few parameters, and the robustness is strong. | It is easy to mature prematurely, and the convergence precision is low. | Topology optimization problems, reducer, spring problems, etc. |
| Fruit Fly Optimization Algorithm (FOA) [55] | The process is simple, the control parameters are few, and it is easy to implement. | The convergence speed is slow and highly dependent on the initial conditions, which are not conducive to high-dimensional processing. | Structural engineering design optimization problems, wireless sensor network layouts, etc. |
| Flower Pollination Algorithm (FPA) [59] | Few parameters, is easy to implement, and has strong global optimization ability. | The optimization accuracy is low, the convergence speed is slow, and it easily falls into local minima. | Function optimization, text clustering, etc. |
| Sparrow Search Algorithm (SSA) [58] | The adjustment parameters are small, convergence accuracy is high, and robustness is good. | Poor local search ability. | Engineering optimization design problems, multi-classifier coefficient optimization, etc. |
4. Friction Nonlinear Control Strategy
4.1. Control Strategy Based on Friction Model
4.1.1. Fixed Model Compensation
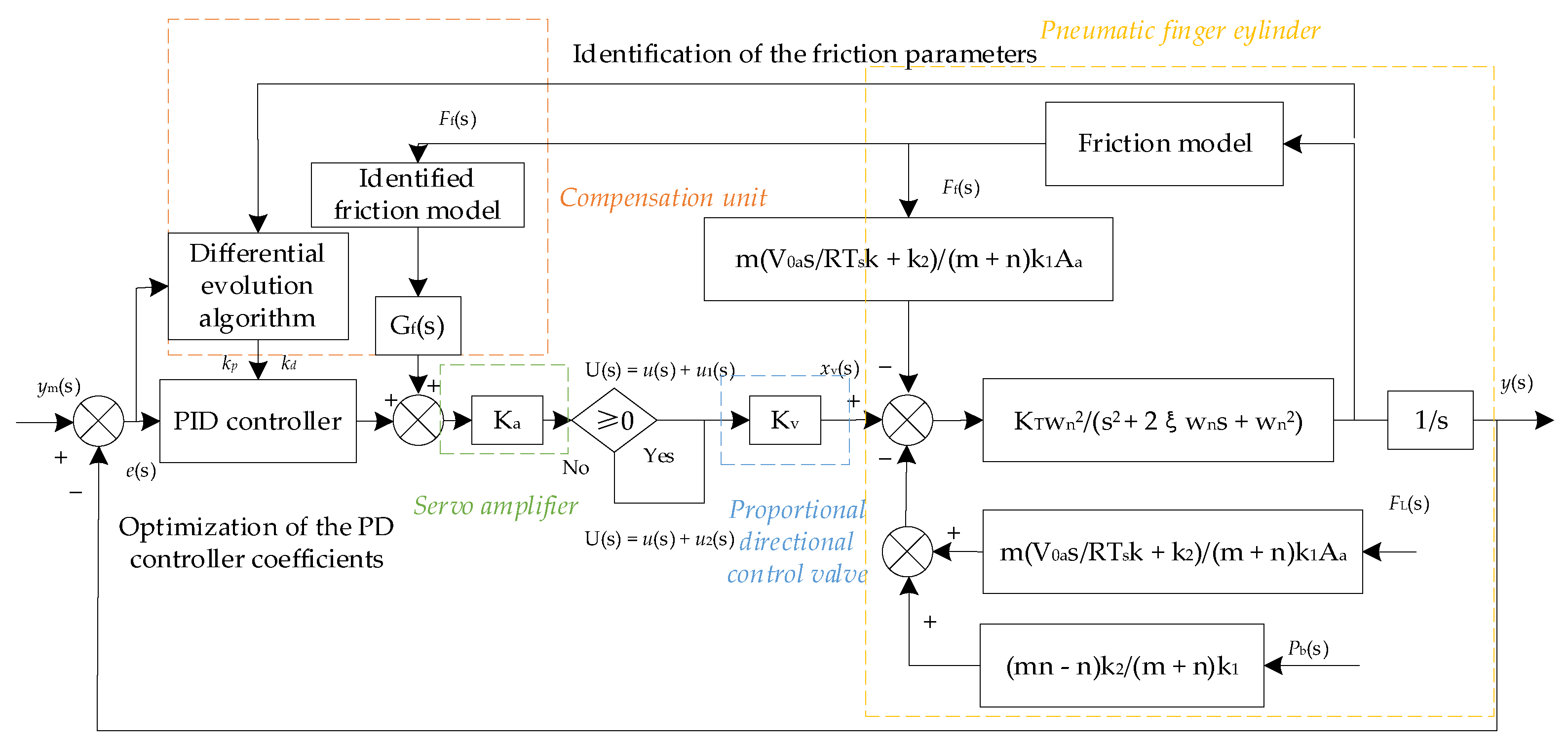
4.1.2. Adaptive Model Compensation
4.2. Friction Model-Free Control Strategy
4.2.1. Mechanical Structure
4.2.2. Model-Free Friction Compensation Methods
4.3. Composite Control Strategy
5. Discussion
5.1. Discussion of Friction Models
- (1)
- The establishment of the friction model should not simply describe the friction phenomenon but should be combined with the dynamic equation of the actual servo system, to comprehensively model it. A coupling relationship exists between the system and friction models. An unsuitable friction model may prevent the correct achievement of the expected behavior of the system dynamics model, and similarly, an unsuitable system dynamics model may limit the accuracy of the friction model;
- (2)
- When establishing a friction model, the software and hardware conditions for parameter identification should be considered, and the difficulty and practicability of friction parameter identification should be comprehensively considered. For a complex friction model, even if the friction phenomenon is described comprehensively, it is difficult to achieve parameter identification, which is undesirable, and a compromise solution should be chosen between practicability and complexity;
- (3)
- Most current verification methods for the accuracy of friction models are based on ideal conditions. However, the purpose of friction modeling is to apply the research results to practical mechanical systems to solve problems in their design, analysis, and control. Therefore, the applicability and feasibility of the friction model under the actual operating conditions must be verified.
5.2. Discussion on Friction Control Strategy
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yao, J. Model-based nonlinear control of hydraulic servo systems: Challenges, developments and perspectives. Front. Mech. Eng. 2018, 13, 179–210. [Google Scholar] [CrossRef]
- Pennestrì, E.; Rossi, V.; Salvini, P.; Valentini, P.P. Review and comparison of dry friction force models. Nonlinear Dyn. 2016, 83, 1785–1801. [Google Scholar] [CrossRef]
- Gao, B.; Shen, W.; Guan, H.; Zhang, W.; Zheng, L. Review and Comparison of Clearance Control Strategies. Machines 2022, 10, 492. [Google Scholar] [CrossRef]
- Meng, Y.; Xu, J.; Jin, Z.; Prakash, B.; Hu, Y. A review of recent advances in tribology. Friction 2020, 8, 221–300. [Google Scholar] [CrossRef] [Green Version]
- Marques, F.; Flores, P.; Claro, J.C.; Lankarani, H.M. Modeling and analysis of friction including rolling effects in multibody dynamics: A review. Multibody Syst. Dyn. 2019, 45, 223–244. [Google Scholar] [CrossRef]
- Nguyen, K.T.; La, N.T.; Ho, K.T.; Ngo, Q.H.; Chu, N.H.; Nguyen, V.D. The effect of friction on the vibro-impact locomotion system: Modeling and dynamic response. Meccanica 2021, 56, 2121–2137. [Google Scholar] [CrossRef]
- Marques, F.; Woliński, Ł.; Wojtyra, M.; Flores, P.; Lankarani, H.M. An investigation of a novel LuGre-based friction force model. Mech. Mach. Theory 2021, 166, 104493. [Google Scholar] [CrossRef]
- Dai, W.; Yang, J.; Wiercigroch, M. Vibration energy flow transmission in systems with Coulomb friction. Int. J. Mech. Sci. 2022, 214, 106932. [Google Scholar] [CrossRef]
- Pan, Q.; Zeng, Y.; Li, Y.; Jiang, X.; Huang, M. Experimental investigation of friction behaviors for double-acting hydraulic actuators with different reciprocating seals. Tribol. Int. 2021, 153, 106506. [Google Scholar] [CrossRef]
- Márton, L.; Lantos, B. Identification and model-based compensation of striebeck friction. Acta Polytech. Hung. 2006, 3, 45–58. [Google Scholar]
- Hao, L.; Pagani, R.; Beschi, M.; Legnani, G. Dynamic and friction parameters of an industrial robot: Identification, comparison and repetitiveness analysis. Robotics 2021, 10, 49. [Google Scholar] [CrossRef]
- Dahl, P.R. Solid friction damping of mechanical vibrations. AIAA J. 1976, 14, 1675–1682. [Google Scholar] [CrossRef]
- Narayanaswami, V.; Tong, J.; Schifani, C.; Bloomfield, P.M.; Dahl, K.; Vasdev, N. Preclinical evaluation of TSPO and MAO-B PET radiotracers in an LPS model of neuroinflammation. PET Clin. 2021, 16, 233–247. [Google Scholar] [CrossRef] [PubMed]
- Hess, D.P.; Soom, A. Friction at a lubricated line contact operating at oscillating sliding velocities. ASME. J. Tribol. 1990, 112, 147–152. [Google Scholar] [CrossRef]
- Hu, J.; Song, H.; Sandfeld, S.; Liu, X.; Wei, Y. Multiscale study of the dynamic friction coefficient due to asperity plowing. Friction 2021, 9, 822–839. [Google Scholar] [CrossRef]
- Zhou, Z.; Zheng, X.; Wang, Q.; Chen, Z.; Sun, Y.; Liang, B. Modeling and simulation of point contact multibody system dynamics based on the 2D LuGre friction model. Mech. Mach. Theory 2021, 158, 104244. [Google Scholar] [CrossRef]
- Armstrong-Helouvry, B. Stick slip and control in low-speed motion. IEEE Trans. Autom. Control 1993, 38, 1483–1496. [Google Scholar] [CrossRef]
- Rabinowicz, E. The nature of the static and kinetic coefficients of friction. J. Appl. Phys. 1951, 22, 1373–1379. [Google Scholar] [CrossRef]
- Johannes, V.I.; Green, M.A.; Brockley, C.A. The role of the rate of application of the tangential force in determining the static friction coefficient. Wear 1973, 24, 381–385. [Google Scholar] [CrossRef]
- Kang, W.S.; Choi, C.K.; Yoo, H.H. Stochastic modeling of friction force and vibration analysis of a mechanical system using the model. J. Mech. Sci. Technol. 2015, 29, 3645–3652. [Google Scholar] [CrossRef]
- Armstrong-Hélouvry, B.; Dupont, P.; De Wit, C.C. A survey of models, analysis tools and compensation methods for the control of machines with friction. Automatica 1994, 30, 1083–1138. [Google Scholar] [CrossRef]
- Kelly, R.; Llamas, J.; Campa, R. A measurement procedure for viscous and coulomb friction. IEEE Trans. Instrum. Meas. 2000, 49, 857–861. [Google Scholar] [CrossRef]
- Virgala, I.; Frankovský, P.; Kenderová, M. Friction effect analysis of a DC motor. Am. J. Mech. Eng. 2013, 1, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Xiang, W.; Yan, S.; Wu, J. Dynamic analysis of planar mechanical systems considering stick-slip and Stribeck effect in revolute clearance joints. Nonlinear Dyn. 2019, 95, 321–341. [Google Scholar] [CrossRef]
- Khan, Z.A.; Chacko, V.; Nazir, H. A review of friction models in interacting joints for durability design. Friction 2017, 5, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Zhao, P.; Liu, J.; Li, Y.; Wu, C. A spring-damping contact force model considering normal friction for impact analysis. Nonlinear Dyn. 2021, 105, 1437–1457. [Google Scholar] [CrossRef]
- Jaiswal, S.; Sopanen, J.; Mikkola, A. Efficiency comparison of various friction models of a hydraulic cylinder in the framework of multibody system dynamics. Nonlinear Dyn. 2021, 104, 3497–3515. [Google Scholar] [CrossRef]
- Wei, Y.; Liu, S. Numerical analysis of the dynamic behavior of a rotor-bearing-brush seal system with bristle interference. J. Mech. Sci. Technol. 2019, 33, 3895–3903. [Google Scholar] [CrossRef]
- Lu, Y.; Zhang, J.; Yang, S.; Li, Z. Study on improvement of LuGre dynamical model and its application in vehicle handling dynamics. J. Mech. Sci. Technol. 2019, 33, 545–558. [Google Scholar] [CrossRef]
- Pennestri, E.; Valentini, P.P.; Vita, L. Multibody dynamics simulation of planar linkages with Dahl friction. Multibody Syst. Dyn. 2007, 17, 321–347. [Google Scholar] [CrossRef]
- Lampaert, V.; Swevers, J.; Al-Bender, F. Modification of the Leuven integrated friction model structure. IEEE Trans. Autom. Control 2002, 47, 683–687. [Google Scholar] [CrossRef] [Green Version]
- Lin, C.J.; Yau, H.T.; Tian, Y.C. Identification and compensation of nonlinear friction characteristics and precision control for a linear motor stage. IEEE/ASME Trans. Mechatron. 2012, 18, 1385–1396. [Google Scholar] [CrossRef]
- Ruderman, M. Presliding hysteresis damping of LuGre and Maxwell-slip friction models. Mechatronics 2015, 30, 225–230. [Google Scholar] [CrossRef]
- Wang, J.; Sui, Z.; Tian, Y.T.; Wang, X.; Fang, L. A speed optimization algorithm based on the contour error model of lag synchronization for CNC cam grinding. Int. J. Adv. Manuf. Technol. 2015, 80, 1421–1432. [Google Scholar] [CrossRef]
- Fu, G.; Zhou, L.; Lei, G.; Lu, C.; Deng, X.; Xie, L. A universal ensemble temperature-sensitive point combination model for spindle thermal error modeling. Int. J. Adv. Manuf. Technol. 2022, 119, 3377–3393. [Google Scholar] [CrossRef]
- Chen, X.; Jiang, S.; Wang, T. Dynamic modeling and analysis of multi-link mechanism considering lubrication clearance and flexible components. Nonlinear Dyn. 2022, 107, 3365–3383. [Google Scholar] [CrossRef]
- Das, J.; Mishra, S.K.; Saha, R.; Mookherjee, S.; Sanyal, D. Nonlinear modeling of an electrohydraulic actuation system via experiments and its characterization by means of neural network. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 58. [Google Scholar] [CrossRef]
- Dempster, A.P.; Schatzoff, M.; Wermuth, N. A simulation study of alternatives to ordinary least squares. J. Am. Stat. Assoc. 1977, 72, 77–91. [Google Scholar] [CrossRef]
- Li, L.; Zhang, H.; Ren, X. A modified multi-innovation algorithm to turntable servo system identification. Circuits Syst. Signal Process. 2020, 39, 4339–4353. [Google Scholar] [CrossRef]
- Lee, C.Y.; Hwang, S.H.; Nam, E.; Min, B.K. Identification of mass and sliding friction parameters of machine tool feed drive using recursive least squares method. Int. J. Adv. Manuf. Technol. 2020, 109, 2831–2844. [Google Scholar] [CrossRef]
- Liang, M.; Zhou, D. A Nonlinear Friction Identification Method Combining Separable Least Squares Approach and Kinematic Orthogonal Property. Int. J. Precis. Eng. Manuf. 2022, 23, 139–152. [Google Scholar] [CrossRef]
- Borsotto, B.; Godoy, E.; Beauvois, D.; Devaud, E. An identification method for static and coulomb friction coefficients. Int. J. Control Autom. Syst. 2009, 7, 305–310. [Google Scholar] [CrossRef]
- Wu, J.; Li, W.; Xiong, Z. Identification of robot dynamic model and joint frictions using a baseplate force sensor. Sci. China Technol. Sci. 2022, 65, 30–40. [Google Scholar] [CrossRef]
- Yoo, M.S.; Choi, S.C.; Park, S.W.; Yoon, Y.D. Identification of mechanical parameters for position-controlled servo systems using sinusoidal commands. J. Power Electron. 2020, 20, 1478–1487. [Google Scholar] [CrossRef]
- Lu, Y.; Yan, D.; Levy, D. Friction coefficient estimation in servo systems using neural dynamic programming inspired particle swarm search. Appl. Intell. 2015, 43, 1–14. [Google Scholar] [CrossRef]
- Tu, X.; Zhou, Y.; Zhao, P.; Cheng, X. Modeling the static friction in a robot joint by genetically optimized BP neural network. J. Intell. Robot. Syst. 2019, 94, 29–41. [Google Scholar] [CrossRef]
- Liao, J.L.; Yin, F.; Luo, Z.H.; Chen, B.; Sheng, D.R.; Yu, Z.T. The parameter identification method of steam turbine nonlinear servo system based on artificial neural network. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 165. [Google Scholar] [CrossRef]
- Liu, J.; Yang, J.; Liu, H.; Tian, X.; Gao, M. An improved ant colony algorithm for robot path planning. Soft Comput. 2017, 21, 5829–5839. [Google Scholar] [CrossRef]
- Zorarpacı, E.; Özel, S.A. Privacy preserving rule-based classifier using modified artificial bee colony algorithm. Expert Syst. Appl. 2021, 183, 115437. [Google Scholar] [CrossRef]
- Gao, B.; Shen, W.; Dai, Y.; Ye, Y.T. Parameter tuning of auto disturbance rejection controller based on improved glowworm swarm optimization algorithm. Assem. Autom. 2022. to be published. [Google Scholar] [CrossRef]
- Wang, X.; Wang, S. New approach of friction identification for electro-hydraulic servo system based on evolutionary algorithm and statistical logics with experiments. J. Mech. Sci. Technol. 2016, 30, 2311–2317. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, K.; Xu, M.; Liu, J.; Yue, H. Medical Grabbing Servo System with Friction Compensation Based on the Differential Evolution Algorithm. Chin. J. Mech. Eng. 2021, 34, 107. [Google Scholar] [CrossRef]
- Wong, W.W.S.; Erkorkmaz, K. Constrained identification of virtual CNC drives using a genetic algorithm. Int. J. Adv. Manuf. Technol. 2010, 50, 275–288. [Google Scholar] [CrossRef]
- Chen, X.; Xu, L.; Zhang, S.; Zhao, S.; Liu, K. Parameter identification of the Bouc-Wen model for the magnetorheological damper using fireworks algorithm. J. Mech. Sci. Technol. 2022, 36, 2213–2224. [Google Scholar] [CrossRef]
- Yu, Y.; Li, Y.; Li, J. Parameter identification and sensitivity analysis of an improved LuGre friction model for magnetorheological elastomer base isolator. Meccanica 2015, 50, 2691–2707. [Google Scholar] [CrossRef]
- Shao, D.; Xu, S.C.; Du, A.M. Dynamic friction modeling and parameter identification for electromagnetic valve actuator. J. Cent. South Univ. 2018, 25, 3004–3020. [Google Scholar] [CrossRef]
- Hung, Y.H.; Lee, C.Y.; Tsai, C.H.; Lu, Y.M. Constrained particle swarm optimization for health maintenance in three-mass resonant servo control system with LuGre friction model. Ann. Oper. Res. 2022, 311, 131–150. [Google Scholar] [CrossRef]
- Gao, B.; Shen, W.; Guan, H.; Zheng, L.; Zhang, W. Research on Multi-Strategy Improved Evolutionary Sparrow Search Algorithm and its Application. IEEE Access 2022, 10, 62520–62534. [Google Scholar] [CrossRef]
- Chen, Y.; Pi, D.; Wang, B. Enhanced global flower pollination algorithm for parameter identification of chaotic and hyper-chaotic system. Nonlinear Dyn. 2019, 97, 1343–1358. [Google Scholar] [CrossRef]
- Cong, S.; Deng, K.; Shang, W.; Kong, D.; Shen, H. Isolation control for inertially stabilized platform based on nonlinear friction compensation. Nonlinear Dyn. 2016, 84, 1123–1133. [Google Scholar] [CrossRef]
- Aguilar-Avelar, C.; Rodríguez-Calderón, R.; Puga-Guzmán, S.; Moreno-Valenzuela, J. Effects of nonlinear friction compensation in the inertia wheel pendulum. J. Mech. Sci. Technol. 2017, 31, 4425–4433. [Google Scholar] [CrossRef]
- Li, F.T.; Ma, L.; Mi, L.T.; Zeng, Y.X.; Jin, N.B.; Gao, Y.L. Friction identification and compensation design for precision positioning. Adv. Manuf. 2017, 5, 120–129. [Google Scholar] [CrossRef]
- Li, C.; Chen, Z.; Yao, B. Identification and adaptive robust precision motion control of systems with nonlinear friction. Nonlinear Dyn. 2019, 95, 995–1007. [Google Scholar] [CrossRef]
- Sancak, K.V.; Bayraktaroglu, Z.Y. Observer-based friction compensation in heavy-duty parallel robot control. J. Mech. Sci. Technol. 2021, 35, 3693–3704. [Google Scholar] [CrossRef]
- Shoeybi, M.; Ghorashi, M. Nonlinear vibration control of a system with dry friction and viscous damping using the saturation phenomenon. Nonlinear Dyn. 2006, 45, 249–272. [Google Scholar] [CrossRef]
- Mei, Z.Q.; Xue, Y.C.; Yang, R.Q. Nonlinear friction compensation in mechatronic servo systems. Int. J. Adv. Manuf. Technol. 2006, 30, 693–699. [Google Scholar] [CrossRef]
- Carneiro, J.F.; de Almeida, F.G. Friction characteristics and servo control of a linear peristaltic actuator. Int. J. Adv. Manuf. Technol. 2018, 96, 2117–2126. [Google Scholar] [CrossRef]
- Benad, J.; Nakano, K.; Popov, V.L.; Popov, M. Active control of friction by transverse oscillations. Friction 2019, 7, 74–85. [Google Scholar] [CrossRef] [Green Version]
- He, Y.; Wang, J.; Hao, R. Adaptive robust dead-zone compensation control of electro-hydraulic servo systems with load disturbance rejection. J. Syst. Sci. Complex. 2015, 28, 341–359. [Google Scholar] [CrossRef]
- Yue, F.; Li, X. Adaptive sliding mode control based on friction compensation for opto-electronic tracking system using neural network approximations. Nonlinear Dyn. 2019, 96, 2601–2612. [Google Scholar] [CrossRef]
- Chuei, R.; Cao, Z. Extreme learning machine-based super-twisting repetitive control for aperiodic disturbance, parameter uncertainty, friction, and backlash compensations of a brushless DC servo motor. Neural Comput. Appl. 2020, 32, 14483–14495. [Google Scholar] [CrossRef]
- Wang, Q.; Zhuang, H.; Duan, Z.; Wang, Q. Robust control of uncertain robotic systems: An adaptive friction compensation approach. Sci. China Technol. Sci. 2021, 64, 1228–1237. [Google Scholar] [CrossRef]
- Lee, H.S.; Ryu, S. Design of a robust controller for a rotary motion control system: Disturbance compensation approach. Microsyst. Technol. 2021, 27, 2293–2302. [Google Scholar] [CrossRef]
- Xu, Z.; Yang, X.; Zhang, W.; Zhang, W.; Zhang, L.; Liu, P.X. Backstepping Sliding Mode Control Based on Extended State Observer for Robotic Manipulators with LuGre Friction. Int. J. Control Autom. Syst. 2022, 20, 2054–2066. [Google Scholar] [CrossRef]
- Li, Z.Q.; Zhou, Q.K.; Zhang, Z.Y.; Zhang, L.C.; Fan, D.P. Prestiction friction compensation in direct-drive mechatronics systems. J. Cent. South Univ. 2013, 20, 3031–3041. [Google Scholar] [CrossRef]
- Chan, J.C.L.; Lee, T.H. Sliding mode observer-based fault-tolerant secondary control of microgrids. Electronics 2020, 9, 1417. [Google Scholar] [CrossRef]
- Han, S.I.; Jeong, C.S.; Yang, S.Y. Robust sliding mode control for uncertain servo system using friction observer and recurrent fuzzy neural networks? J. Mech. Sci. Technol. 2012, 26, 1149–1159. [Google Scholar] [CrossRef]
- Meng, D.; Tao, G.; Liu, H.; Zhu, X. Adaptive robust motion trajectory tracking control of pneumatic cylinders with LuGre model-based friction compensation. Chin. J. Mech. Eng. 2014, 27, 802–815. [Google Scholar] [CrossRef]
- Wu, Y.; Yue, D. Desired compensation adaptive robust control of electrical-optical gyro-stabilized platform with continuous friction compensation using modified LuGre model. Int. J. Control Autom. Syst. 2018, 16, 2264–2272. [Google Scholar] [CrossRef]
- Jiang, N.; Xu, J.; Zhang, S. Distributed adaptive synchronization control with friction compensation of networked lagrange systems. Int. J. Control Autom. Syst. 2018, 16, 1038–1048. [Google Scholar] [CrossRef]
- Luo, G.; Wang, Z.; Ma, B.; Wang, Y.; Xu, J. Observer-based interval type-2 fuzzy friction modeling and compensation control for steer-by-wire system. Neural Comput. Appl. 2021, 33, 10429–10448. [Google Scholar] [CrossRef]
- Gao, B.; Shen, W.; Dai, Y.; Wang, W. A Kind of Electro-hydraulic Servo System Cooperative Control Simulation: An Experimental Research. Recent Adv. Electr. Electron. Eng. 2022. to be published. [Google Scholar] [CrossRef]
- Gao, B.; Shen, W.; Zhao, H.; Zhang, W.; Zheng, L. Reverse Nonlinear Sparrow Search Algorithm Based on the Penalty Mechanism for Multi-Parameter Identification Model Method of an Electro-Hydraulic Servo System. Machines 2022, 10, 561. [Google Scholar] [CrossRef]
- Dólleman, P.; Carneiro, J.F.; Gomes de Almeida, F. Exploring the use of two servo-valves for servo-pneumatic control. Int. J. Adv. Manuf. Technol. 2018, 97, 3963–3980. [Google Scholar] [CrossRef]
- Kim, H.M.; Han, S.I.; Kim, J.S. Precision position control of servo systems using adaptive back-stepping and recurrent fuzzy neural networks. J. Mech. Sci. Technol. 2009, 23, 3059–3070. [Google Scholar] [CrossRef] [Green Version]
- Hu, H.; Wang, Y.; Sun, G. Hybrid adaptive compensation control scheme for high-precision servo system. Trans. Tianjin Univ. 2013, 19, 217–224. [Google Scholar] [CrossRef]












| Friction Model | Advantages | Disadvantage | Descriptive Features |
|---|---|---|---|
| Classical model [21,22,23] | It is simple and parameter identification is easy. | Discontinuous, the friction characteristics are not accurately described. | Based on the Coulomb friction model, it notes that there is static friction and that friction is related to speed. |
| Stribeck model [24] | Obtains a smooth transition between static friction and viscous friction. | Inability to describe friction dynamics. | A relatively complete description of the static characteristics of friction. |
| Karnopp model [25] | Embodies viscous damping, Coulomb friction, and static friction to avoid switching between viscous and sliding friction equations of state. | It is difficult to determine the concept of a zero-speed interval, and it cannot reflect the dynamic characteristics. | A small viscosity interval is constructed to reduce the low-speed detection requirements. |
| Dahl model [30] | The pre-slip displacement and friction hysteresis are described more accurately. | The Stribeck effect is not described. | Partial differential equations are used to describe the dynamic friction process. |
| Bristle model [28] | Microscopic description of bump characteristics. | The number of calculations is large. | An integral algorithm is used. |
| Bliman–Sorine model [27] | It can describe the Stribeck effect when the motion is commutated. | The Stribeck effect, friction memory, and variable static friction are not described. | The two Dahl models with different orders work together. |
| Time lag model [34] | Demonstrates frictional memory behavior. | Descriptions of other friction phenomena are missing. | Fitting of the relative sliding velocities. |
| Reset integral model [26] | The stress of the joint is reflected, and the simulation is effective. | Discontinuous. | Additional state variable z. |
| LuGre model [29] | More complete description of dynamic and static characteristics. | Difficult to identify. | An amount of bristle deformation z is introduced to synthesize the Stribeck effect. |
| Ensemble model [35] | The dynamic and static characteristics are described qualitatively. | This involves two state-interval switching problems, and the structure is complex. | Friction-state model switching description. |
| Dynamic correction model [36] | Modifies the above model. | Its applicability is poor, and the scope of application is limited. | The parameters change dynamically. |
| Neural network model [37] | Friction model structure and parameter identification should be avoided. | The training is difficult, time-consuming, and computationally intensive. | Neural networks. |
| Identification Method | Accuracy | Complexity | Linear | Nonlinear | Applicable Scope | Advantages | Disadvantages |
|---|---|---|---|---|---|---|---|
| Classical method | Low | High | High | Low | High | The principle is concise, the number of calculations is small, the convergence speed is fast, and it is easy to implement. | The requirements for the input signal are relatively high, and the nonlinear system identification ability is poor. |
| Neural networks | High | Medium | High | High | Medium | Self-learning and self-adaptive abilities. | There are many sample requirements, and the training time is long. |
| Metaheuristics | High | Low | High | High | High | It is widely used and does not depend on the characteristics of the model. | The algorithm is not perfect, and there are problems, such as premature convergence to the local optimal solution. |
| System Characteristics | Friction Effect | Compensation Purpose |
|---|---|---|
| Bidirectional operation [84] | Discontinuity of speed zero | Eliminate movement discontinuities |
| One-way, low-speed operation [85] | Crawling phenomenon | Eliminate crawling |
| One-way, high-speed operation [86] | Large following error | Reduce/eliminate following error |
| Control Strategy | Accuracy | Complexity | Applicability | Advantages | Disadvantages | |
|---|---|---|---|---|---|---|
| Control based on friction model | Fixed model compensation | Low | High | High | Simple structure and convenient design. | Over-reliance on the accuracy of the friction model. |
| Adaptive model compensation | Medium | High | High | Achieve online parameter correction, etc. | ||
| Friction model-free control | Mechanical structure | High | Low | Low | High control accuracy. | The implementation cost is high, and the structure is complex. |
| Model-free friction compensation | Medium | Medium | High | The servo system has strong anti-interference ability. | It is necessary to consider nonlinear factors comprehensively. | |
| Composite control | High | Medium | Medium | Superior control performance, good stability. | It is necessary to coordinate the coupling relationship between controllers. | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, B.; Shen, W.; Zheng, L.; Zhang, W.; Zhao, H. A Review of Key Technologies for Friction Nonlinearity in an Electro-Hydraulic Servo System. Machines 2022, 10, 568. https://doi.org/10.3390/machines10070568
Gao B, Shen W, Zheng L, Zhang W, Zhao H. A Review of Key Technologies for Friction Nonlinearity in an Electro-Hydraulic Servo System. Machines. 2022; 10(7):568. https://doi.org/10.3390/machines10070568
Chicago/Turabian StyleGao, Bingwei, Wei Shen, Lintao Zheng, Wei Zhang, and Hongjian Zhao. 2022. "A Review of Key Technologies for Friction Nonlinearity in an Electro-Hydraulic Servo System" Machines 10, no. 7: 568. https://doi.org/10.3390/machines10070568