In order to verify the effectiveness of the method we proposed, we selected the data source of Case Western Reserve University’s Electrical Engineering Laboratory for simulation experiments. In the experimental platform, the drive end bearing model was SKF6205. The fan end bearing model was SKF6203. The fault setting was a single point damage using Electronic Discharge Machining (EDM), and the damage diameter included three types: 0.1778, 0.3556, and 0.5334 mm. Among them, the damage point of the outer ring of the bearing was set at three different positions of the clock: 3 o’clock, 6 o’clock, and 12 o’clock. The vibration signal was collected with a sampling frequency of 12 kHz, and the drive end bearing failure also included data with a sampling frequency of 48 kHz. In the simulation experiment, the motors were given four loads of 0, 1, 2, and 3 Hp, corresponding to four different speeds of 1797, 1772, 1750, and 1730 r/min. Additionally, the rated power of the motor was 1.5 KW.
3.1. Simulation Experiment of PSDMBSO Algorithm
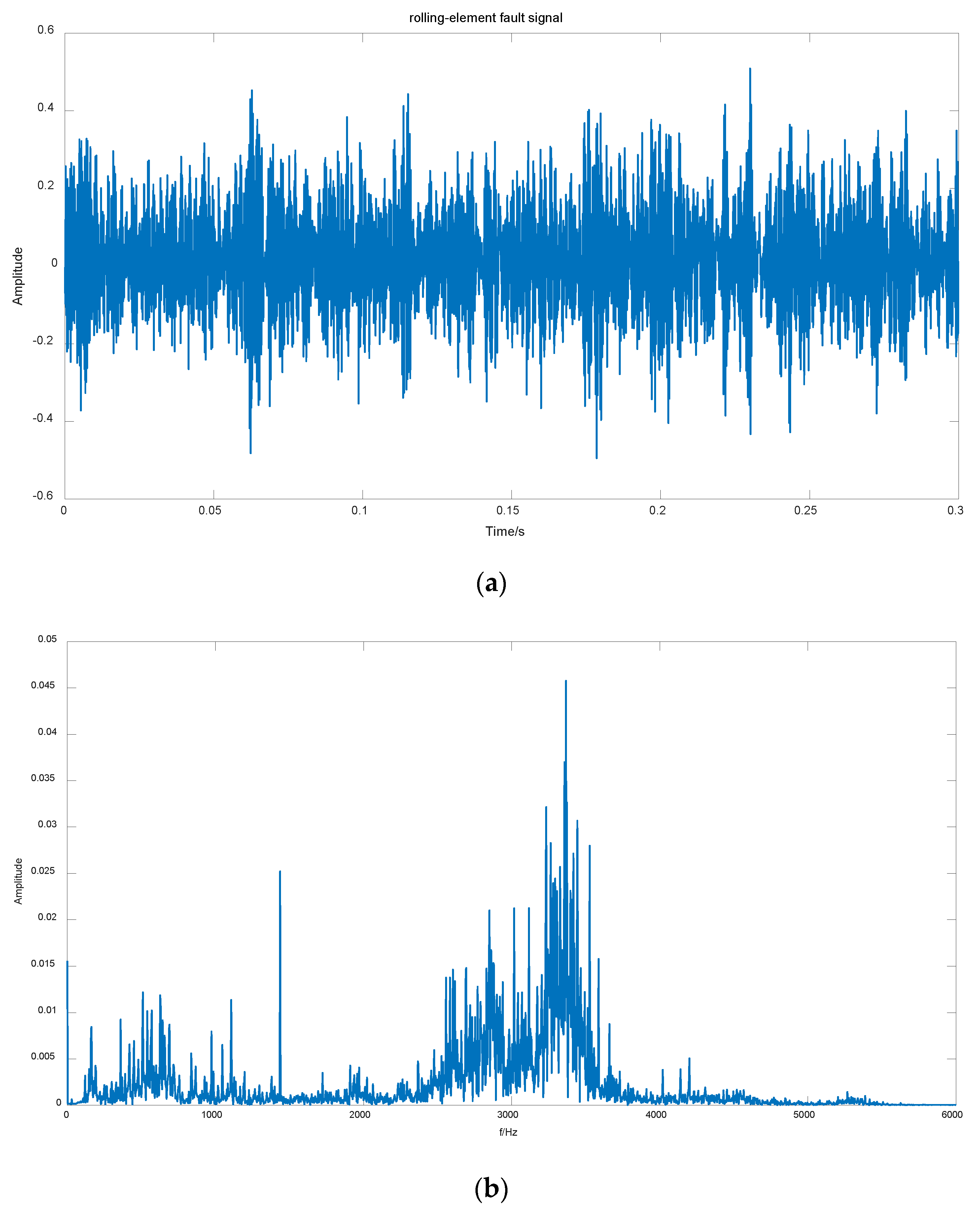
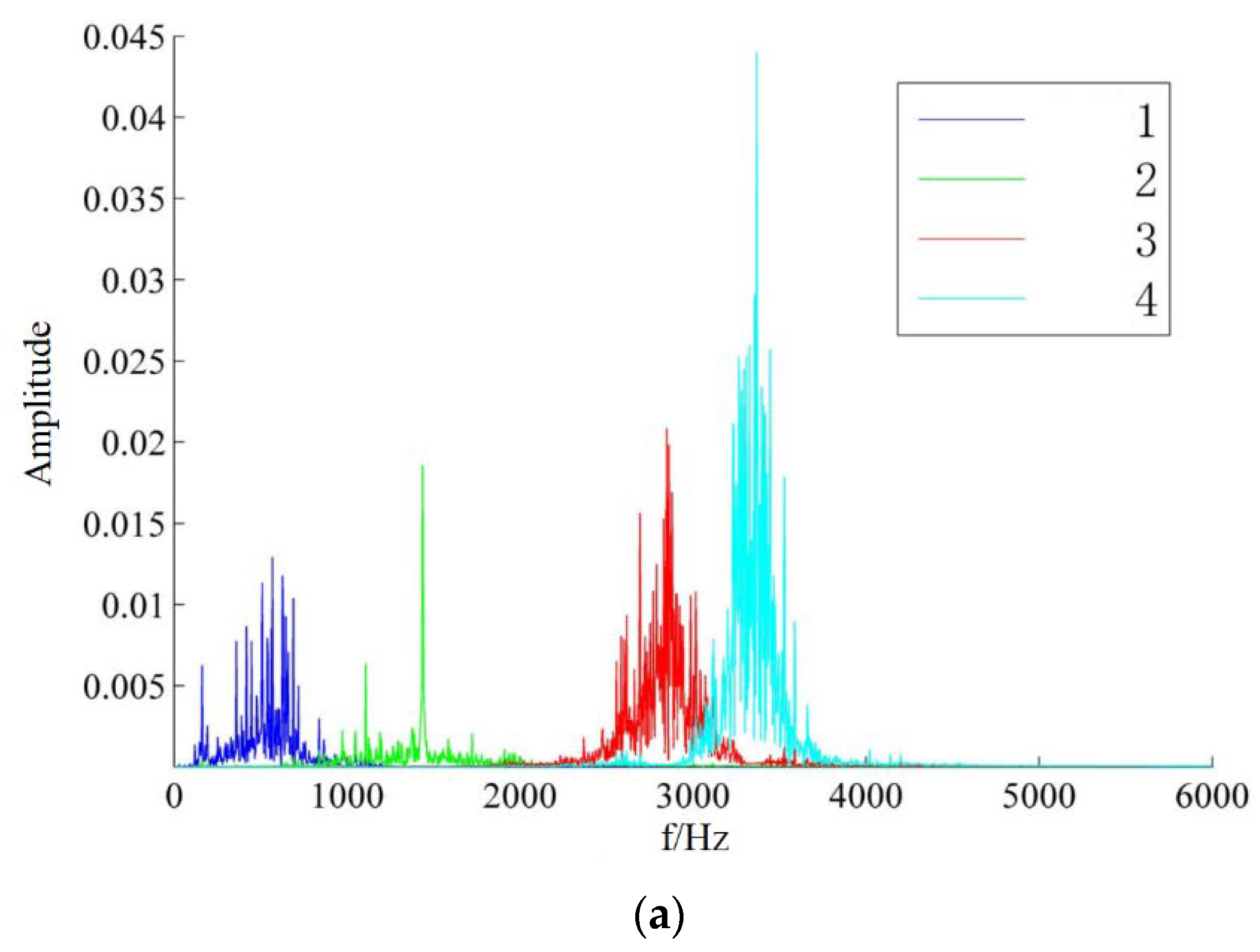
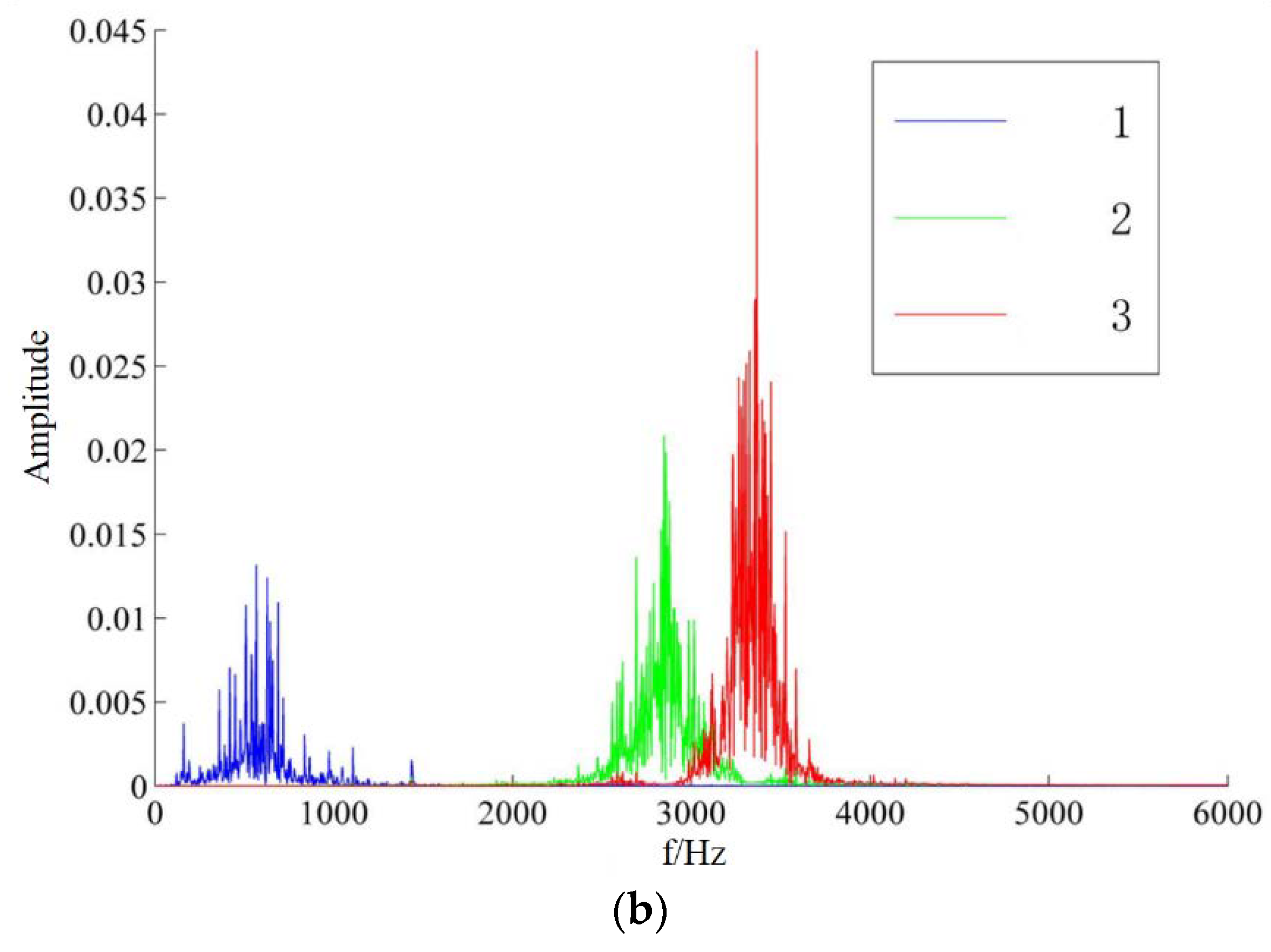
When cracks or other faults occur in the components of the rolling bearing, the vibration state of the rolling bearing will change. In order to accurately analyze the characteristic information contained in the vibration signal, this paper uses the rolling-element fault data with a motor speed of 1797 rpm and a damage diameter of 0.1778 mm, and was compared with several commonly used optimization algorithms which include Particle Swarm Optimization (PSO), Genetic Algorithm (GA), and BSO.
From
Figure 2b, it can be seen that the fault signal mainly includes 3 main frequency components.
The parameter settings of the PSDMBSO algorithm were divided into BSO parameter settings and update, and initialization parameter settings. The BSO parameters were the same as in Reference [
22], the initialization parameters (m, n, etc.) were set to common values, and the update parameters were selected from the optimal values in 10 random parameter experiments within the common range. Update and initialization parameters according to the final results of the simulation experiment are shown in
Table 2.
According to Konstantin Dragomiretskiy’s documents, the parameters that the VMD algorithm needs to be determined are: the number of IMF components
, penalty factor
, convex function optimization-related parameter
, center frequency initialization setting
, center frequency update related parameter
, termination condition
. Parameters other than
and
have little effect on the decomposition effect, set to common values, namely,
,
,
,
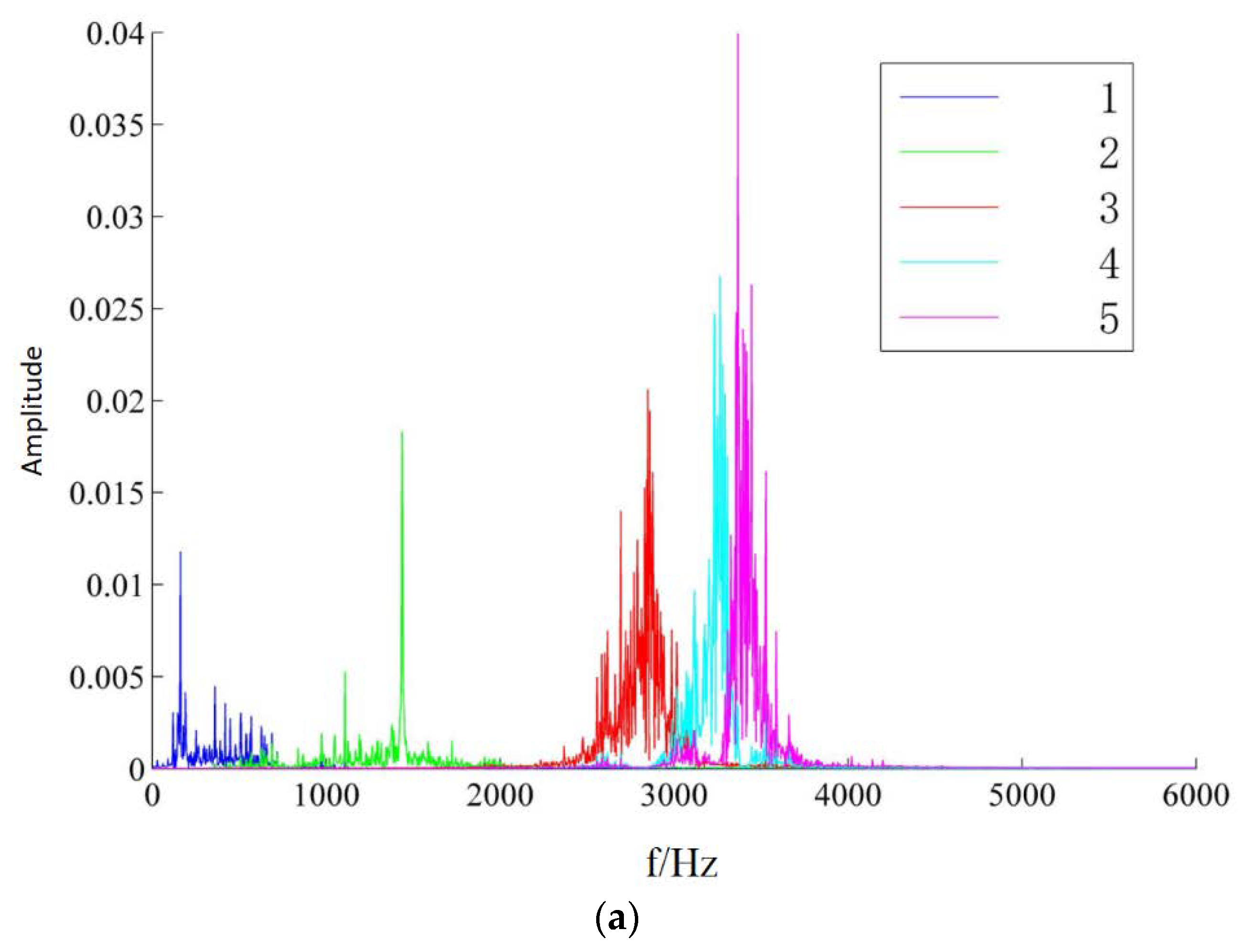
. The spectral distribution diagrams of the modal components are shown in
Figure 3 and
Figure 4.
It can be seen from
Figure 3a,b that the original signal is decomposed into 5 and 4 modal components, respectively, and different numbers of false components appear; that is, the over-decomposition phenomenon occurs.
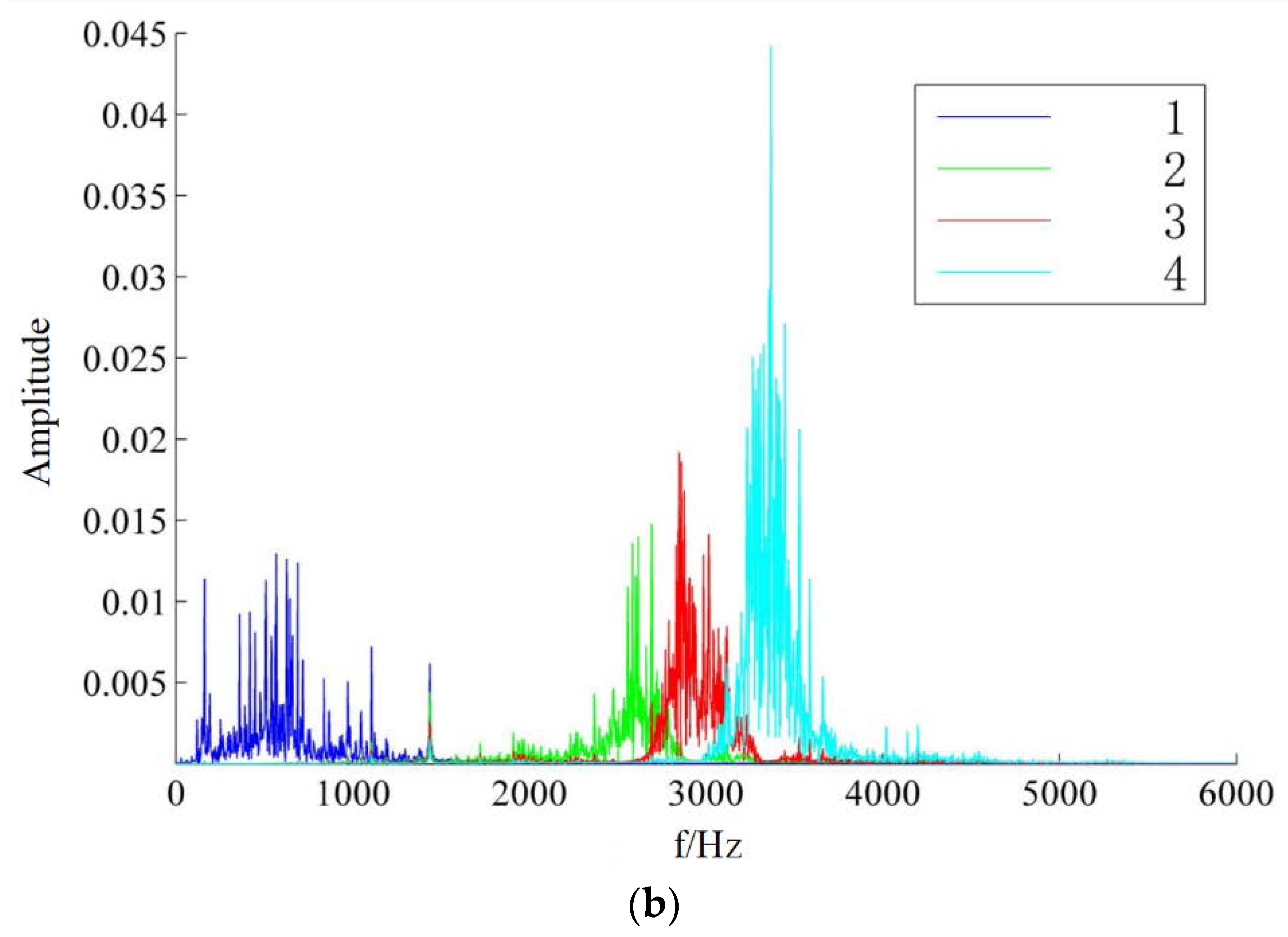
It can be seen from
Figure 4b that the original signal is decomposed into 4 modal components, while the result of the algorithm we proposed is 3 modal components, and there is no modal aliasing phenomenon, indicating that the original signal achieves a better good decomposition effect.
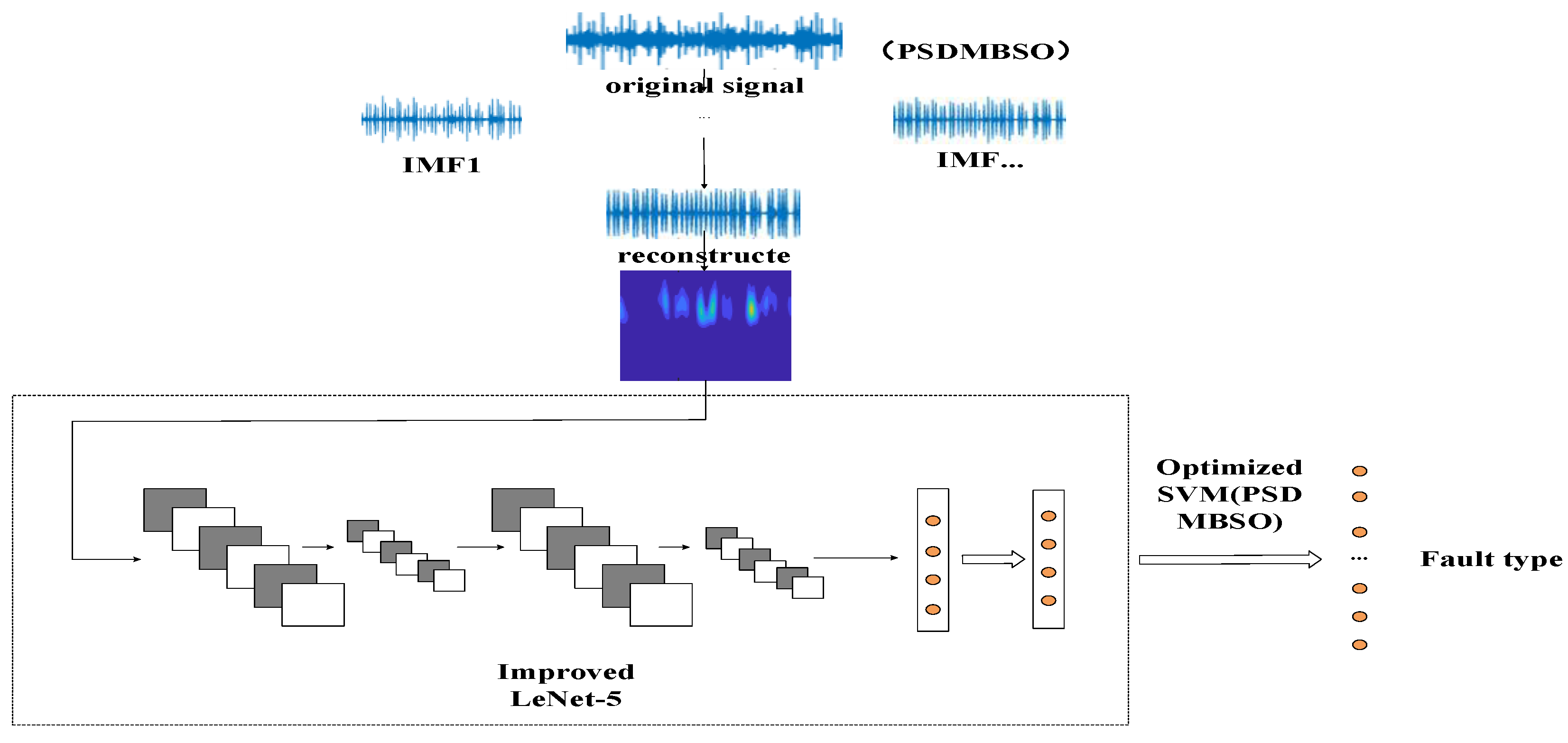
In order to get close to the actual situation, we used the bearing failure data from the Bearing Data Center of Western Reserve University. The set load was 2 Hp, which means the speed was 1750 r/min. By compressing the obtained time–frequency diagram to a resolution of 64 × 64 in the same proportion, 7000 training set images and 1000 test set images were finally obtained. The specific fault types are shown in
Table 3. For the four categories of vibration acceleration signals of ten types of faults at rated power, the optimal parameter combinations searched by the PSDMBSO algorithm are shown in
Table 4 below.
3.2. Improved Filter Construction Based on Band Entropy
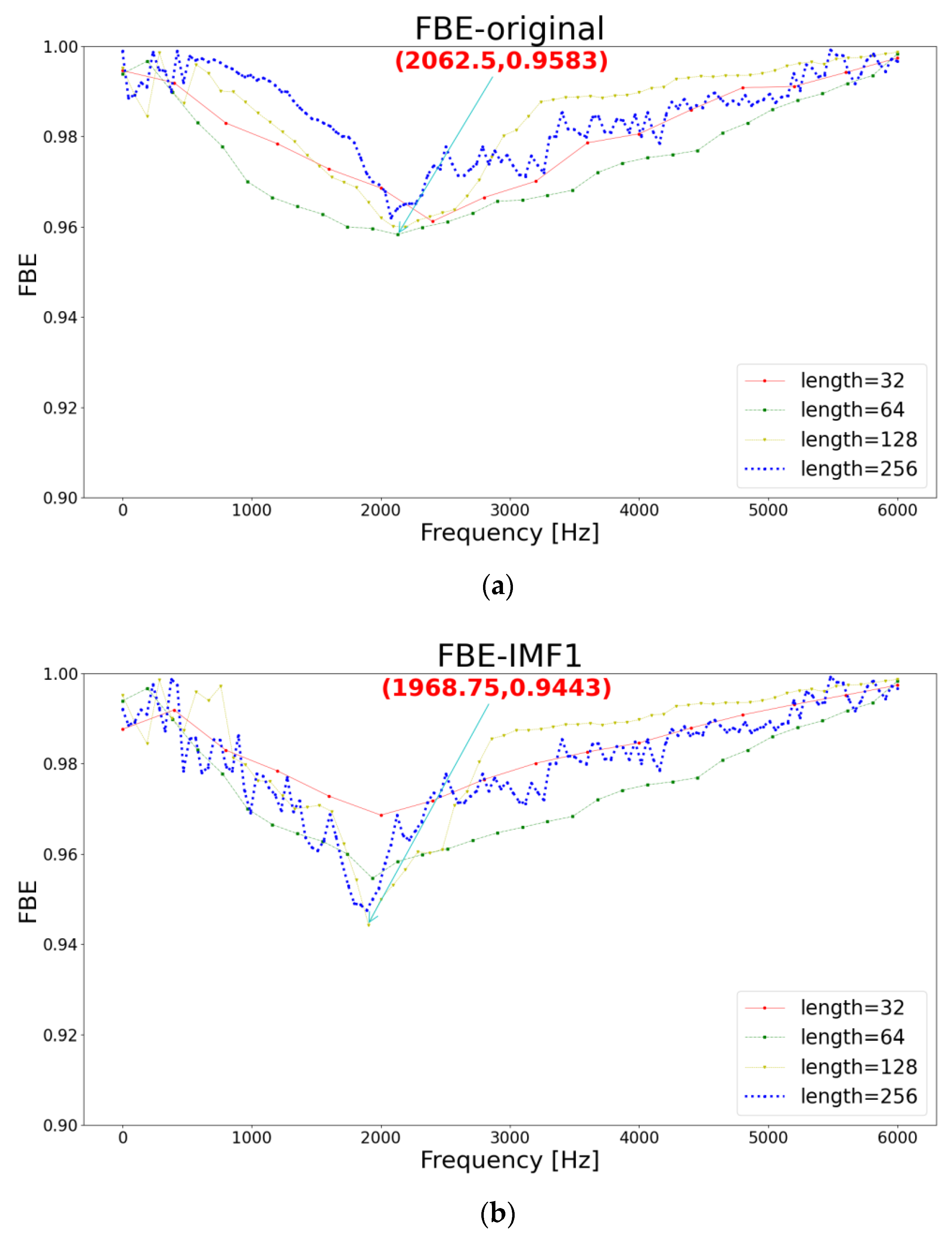
Take rolling bearing load 2 Hp, damage radius 0.1778 mm, speed 1750 r/min, sampling frequency 12 kHz inner-ring fault data as an example. The final selection results of reconstruction components are as follows: the frequency band entropy data of the original signal under window functions of different lengths is shown in
Figure 5a below.
It can be seen that the center frequency is 2062.5 Hz, and the corresponding optimal window function length is 64. According to the above formula, the pass band of the corresponding band filter of the original signal can be obtained as [1921.375, 2203.625]. In addition, the parameters obtained by the PSMBSO algorithm optimization are
,
, and then the corresponding IMF components can be obtained, and the same operation is performed on each component. The final result is that IMF1 and IMF2 are selected as the optimal reconstruction components. The detailed process is as follows: as shown in
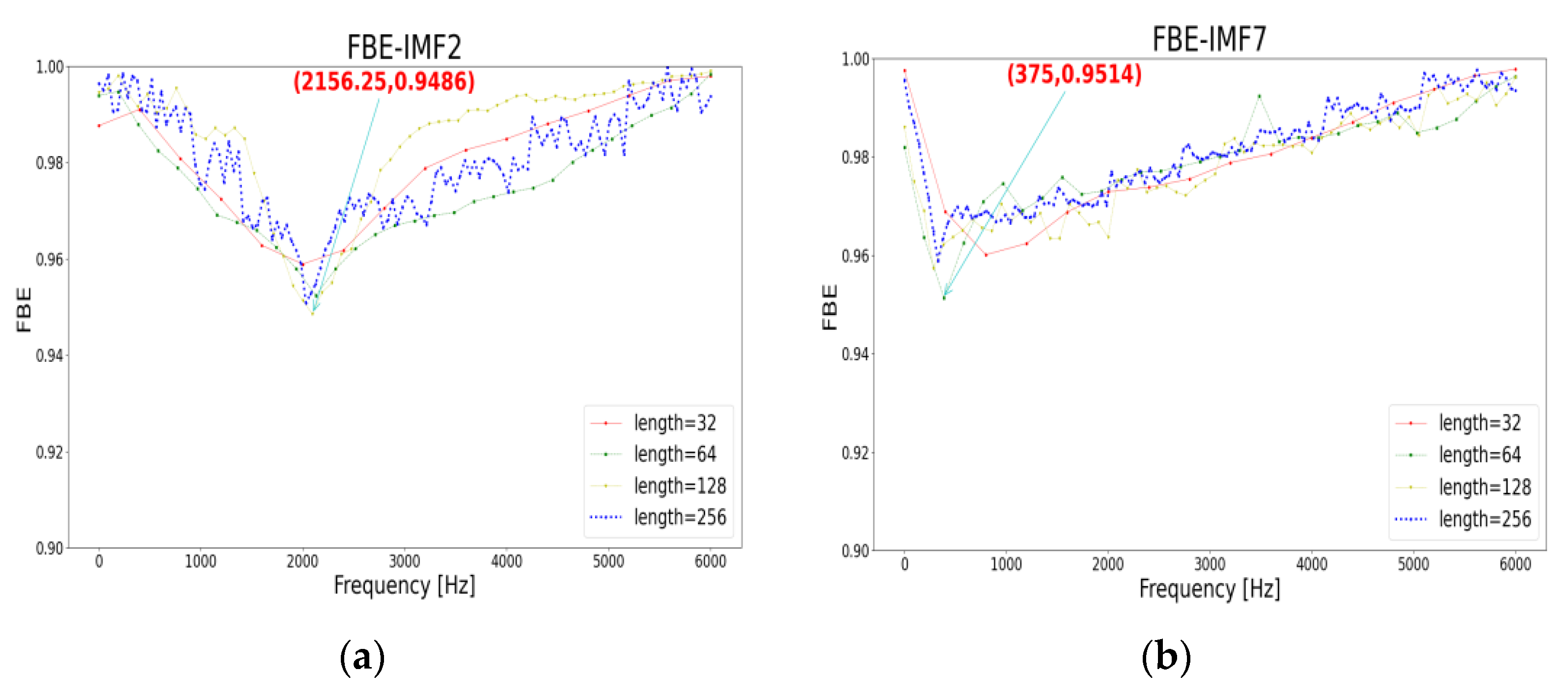
Figure 5b and
Figure 6a, the corresponding center frequency and optimal window function length can be obtained as [1968.75, 128] and [2156.25, 128]. According to the formula, the final corresponding filters are [1898.4375, 2037.0625] and [2085.9375, 2226.5625], which meets the previously proposed standards, and the remaining components do not meet the requirements, so they are discarded. Take IMF7 as an example—its center frequency is 375 Hz, the corresponding optimal window function length is 64, and the final result is [234.375,515.625], which obviously does not meet the requirements. The detailed results are shown in
Figure 6b below.
3.3. Experimental Result
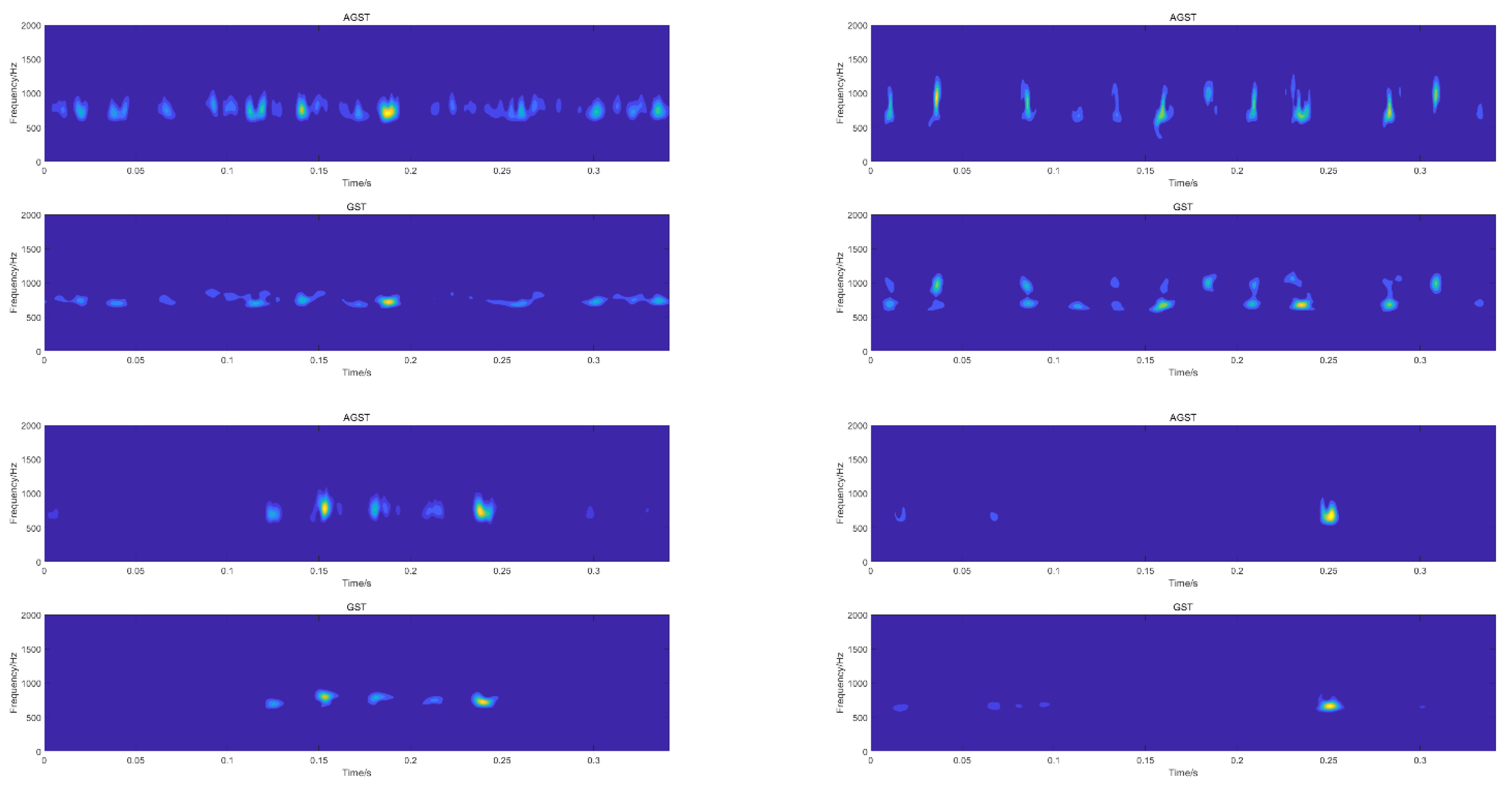
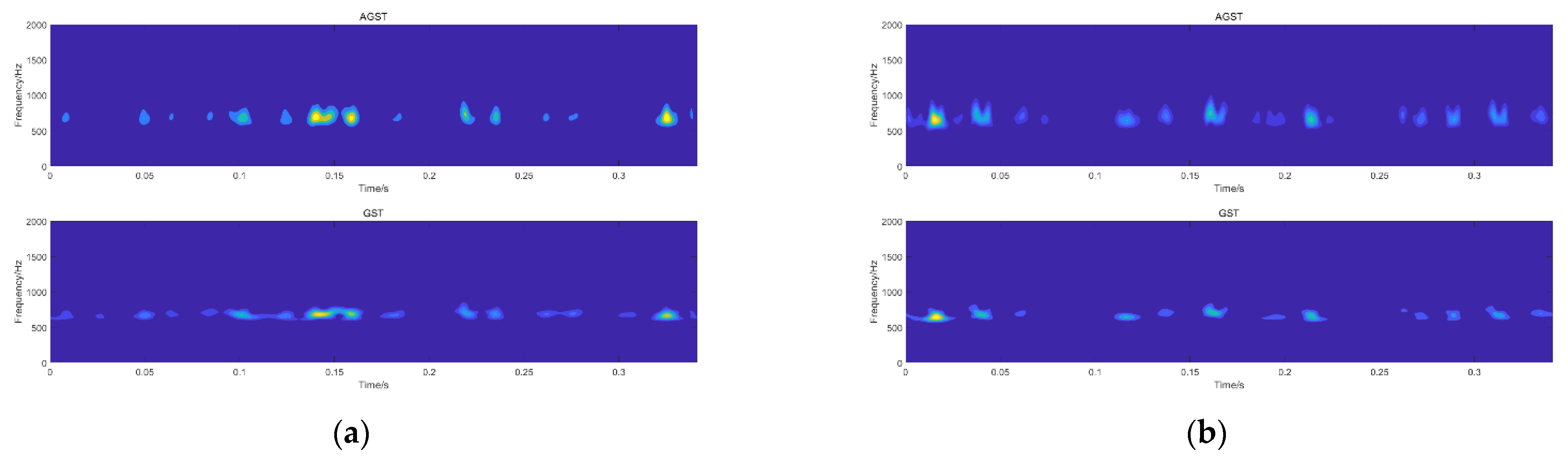
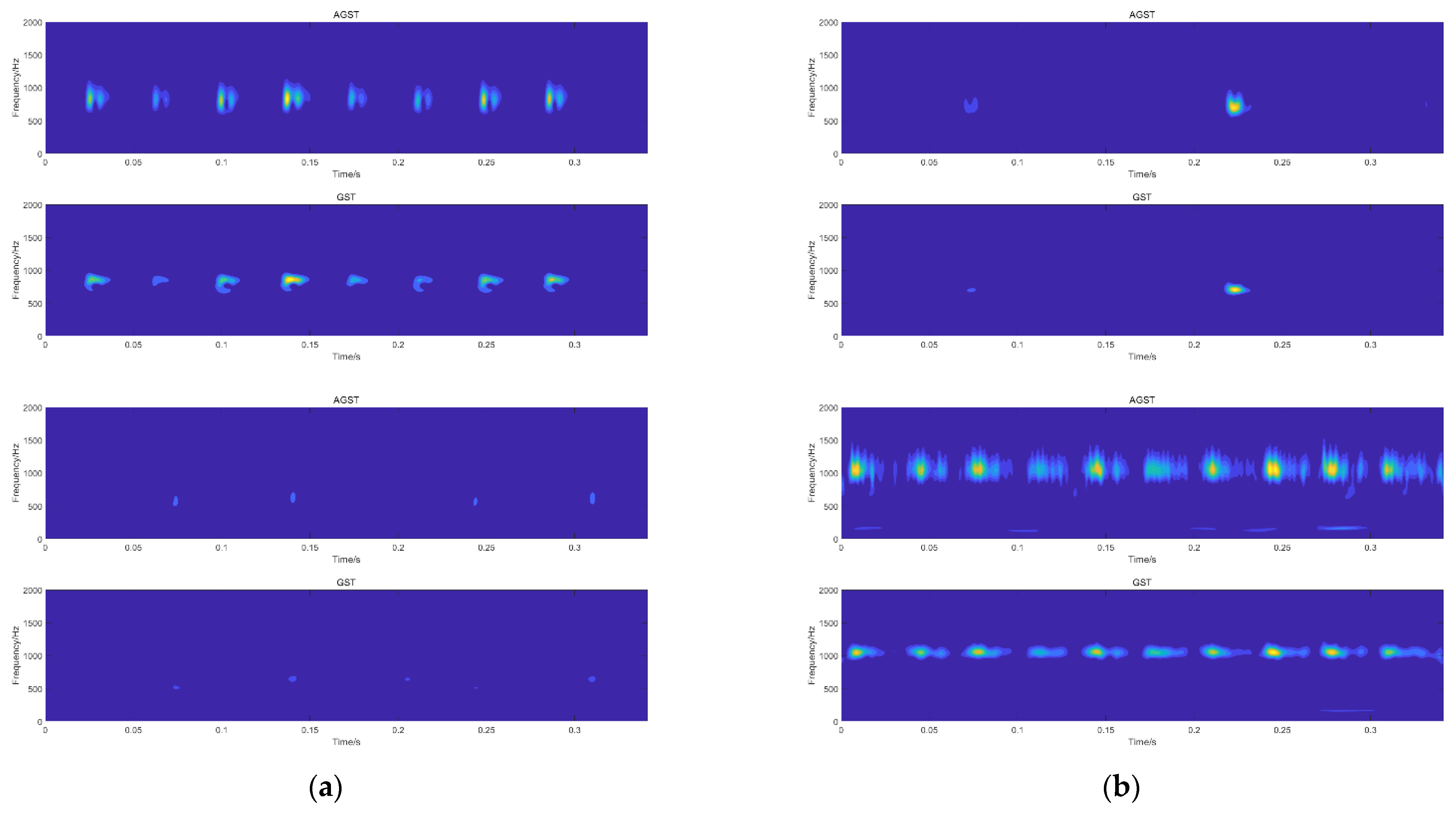
In this paper, the bearing fault data set of the drive end was selected, and the one-dimensional signal was converted into a time–frequency map using AGST transformation on the reconstructed signal. At the same time, the time–frequency map was compared with the time–frequency map processed by GST, as shown in
Figure 7 and
Figure 8.
The upper part of
Figure 8b is the outer-ring fault data with the fault diameter equal to 0.5334 mm, and the lower part is the normal signal.
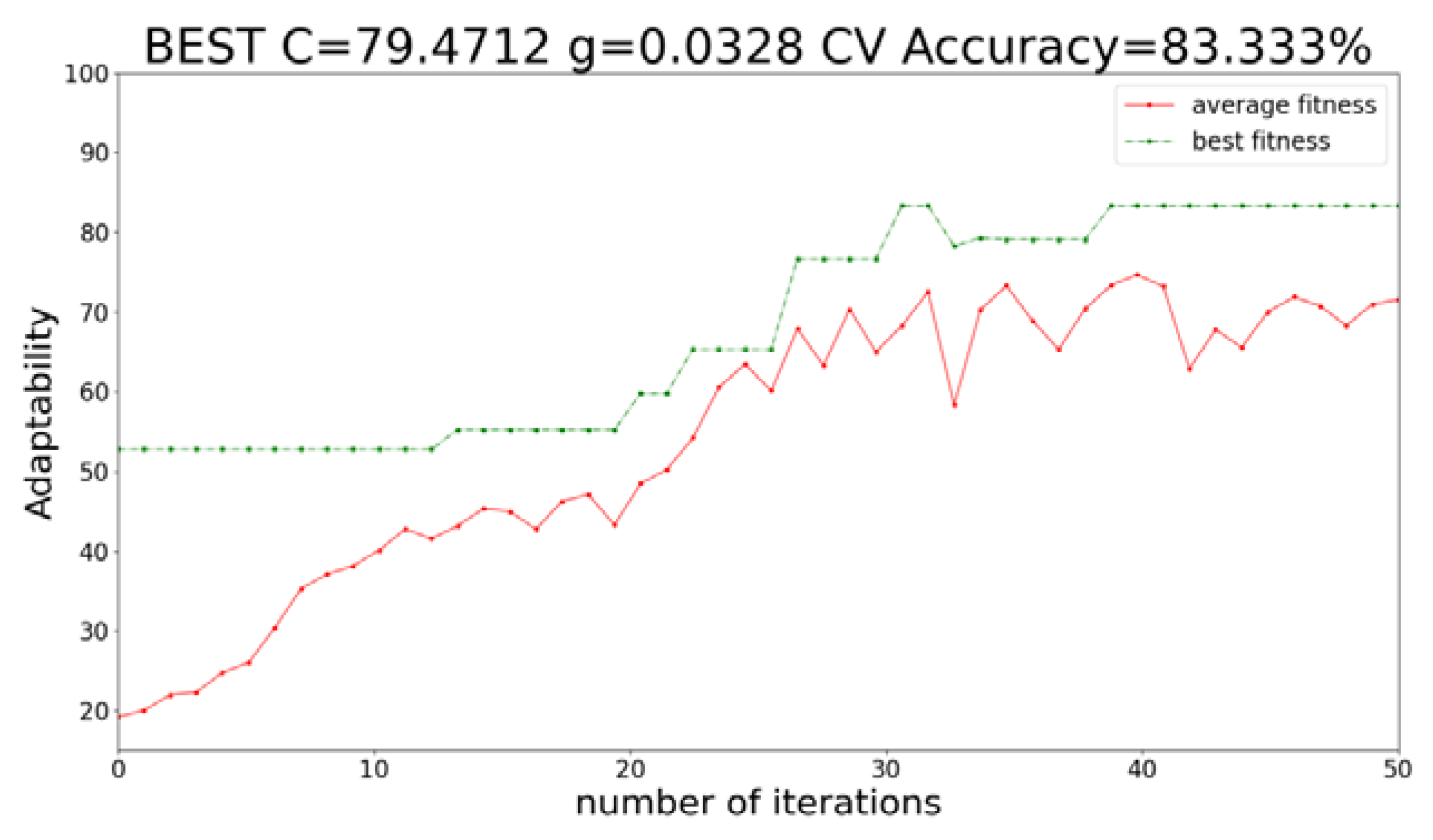
For the optimization problem of SVM, the fitness function was selected as the 5-fold cross-validation method. When the accuracy rate reaches the highest and does not change, the corresponding C and g are the best parameters. In this paper, the range of C and g was set to 0–100.
As shown in
Figure 9, the blue curve represents the average fitness, and the red curve represents the best fitness. With the increase of the number of iterations, the red best fitness curve shows an upward trend, and reaches the maximum when the number of iterations reaches 30. Excellent and remaining unchanged, the correct rate of 5-fold cross-validation is 83.333%, the best parameter C = 79.4712, the best parameter g = 0.0328, and the SVM classification model is established with these two parameters.
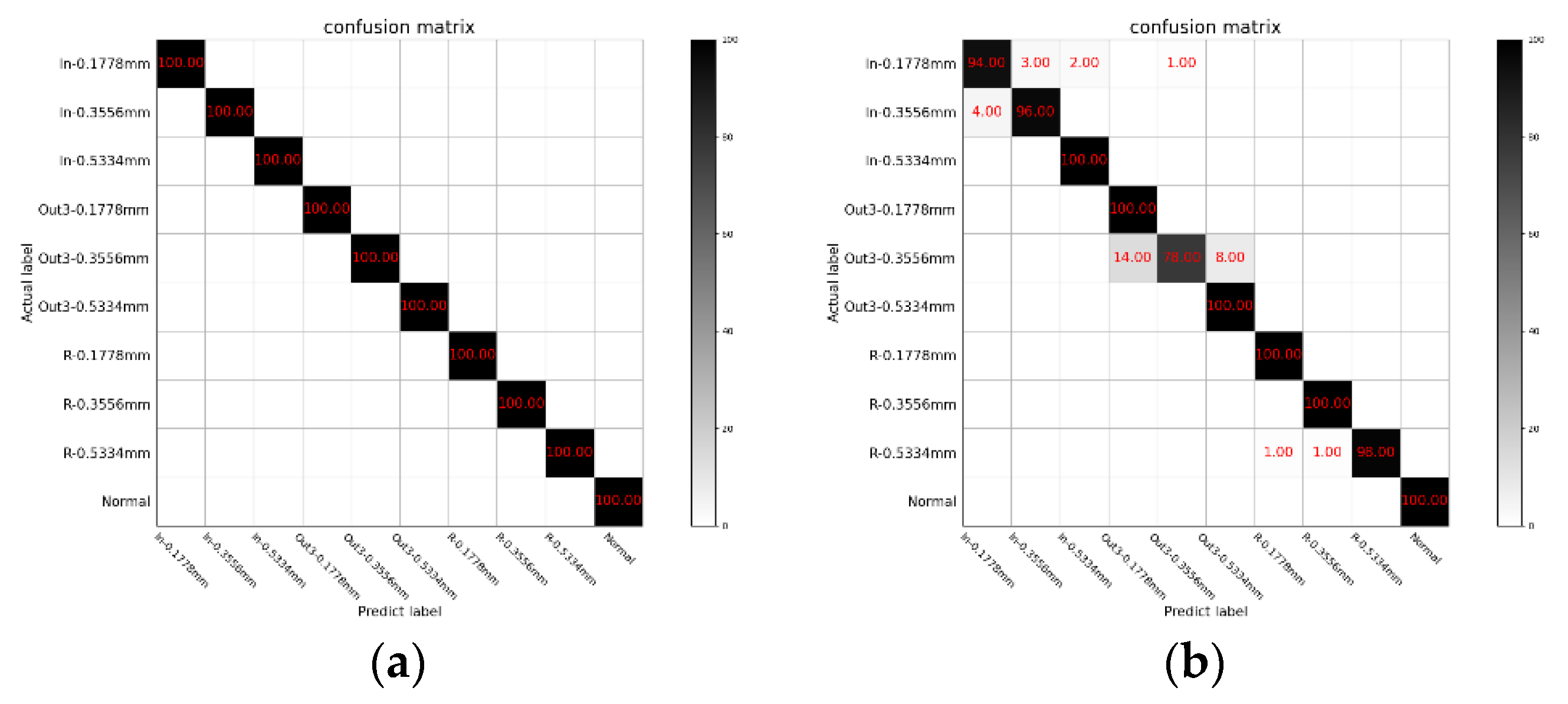
The optimized SVM model was selected, and the experimental results are shown in
Figure 10a.
It can be seen from
Figure 10a that the predicted label and the actual label of the test set completely overlap, which means the diagnosis accuracy of the bearing reaches 100%.
We selected the same data, used the Generalized S-Transform to convert the reconstructed signal into a time–frequency map, and other steps are the same. The final test set result is shown in
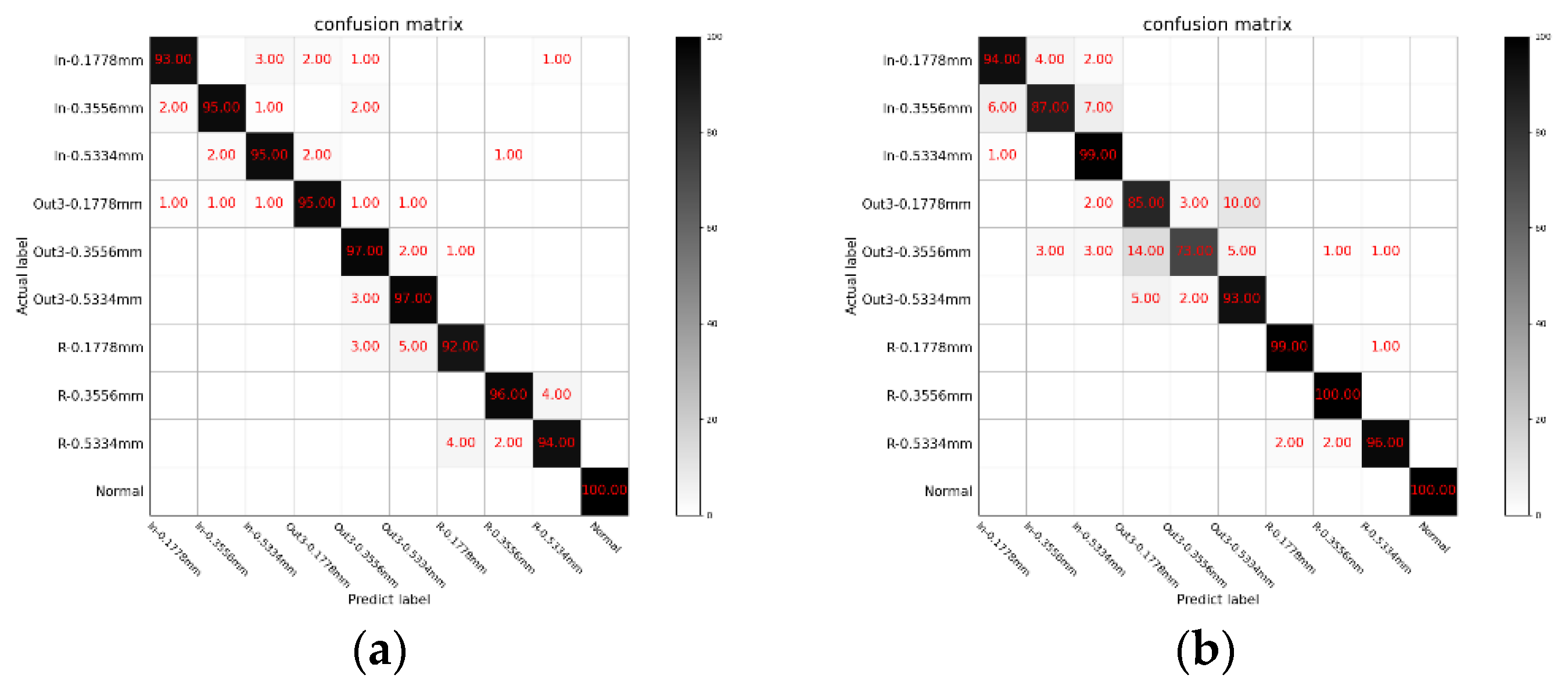
Figure 10b. Under the same data, the final result of using improved screening criteria is shown in
Figure 11a.
It can be drawn from
Figure 10b that the final result of using the Generalized S-Transform is 96.6%, which shows the superiority of AGST. Compared with the method, the accuracy of the diagnostic model we proposed is improved by 3.4% at rated power. As shown in
Figure 11a, the accuracy of the test set is 95.4%, which is also 4.6% lower than the method we proposed, which illustrates the effectiveness of the screening criteria we proposed. In order to further address the advantages of the feature extraction method we proposed, we used the traditional VMD decomposition method (
) to decompose the signal, and then used the same processing.
It can be seen from
Figure 11b that the accuracy is 92.60%. Under the same data, the method we proposed has an accuracy rate of 7.40% higher compared with the traditional VMD, which shows that the method we proposed can accurately identify different faults with the same damage diameter.
Based on the above comparative experiments, the fault diagnosis results of the above methods for different positions and different degrees of damage under the rated power are further explored. The method we proposed is named Method 1. The method that uses PSDMBSO to optimize the VMD parameter + optimized band filters + AGST + CNN + Softmax is named Method 2. The method that PSDMBSO-optimized VMD + unoptimized band filters + AGST + SVM is named Method 3. The method that uses the traditional VMD decomposition method is named Method 4.
The network structure and parameters of CNN in Method 2 are the same as in Method 1, the SVM parameters C and g in Method 3 are randomly selected parameters, and the parameter of traditional VMD in Method 4 was set to [6, 2000].
In order to further test the diagnostic accuracy of method we proposed under non-rated power, the data under the same state were selected for experimental comparison. The final results are shown in
Table 5,
Table 6 and
Table 7.
It can be seen that the method we proposed has an accuracy close to 100%. Compared to other methods with better current-level effects, the accuracy rate has been improved by 6.2–8.9%. The result shows that the method we proposed is suitable for the complex and changeable working environment of the rolling bearing, which has extraordinary significance for the diagnosis of rolling bearings in practical applications.
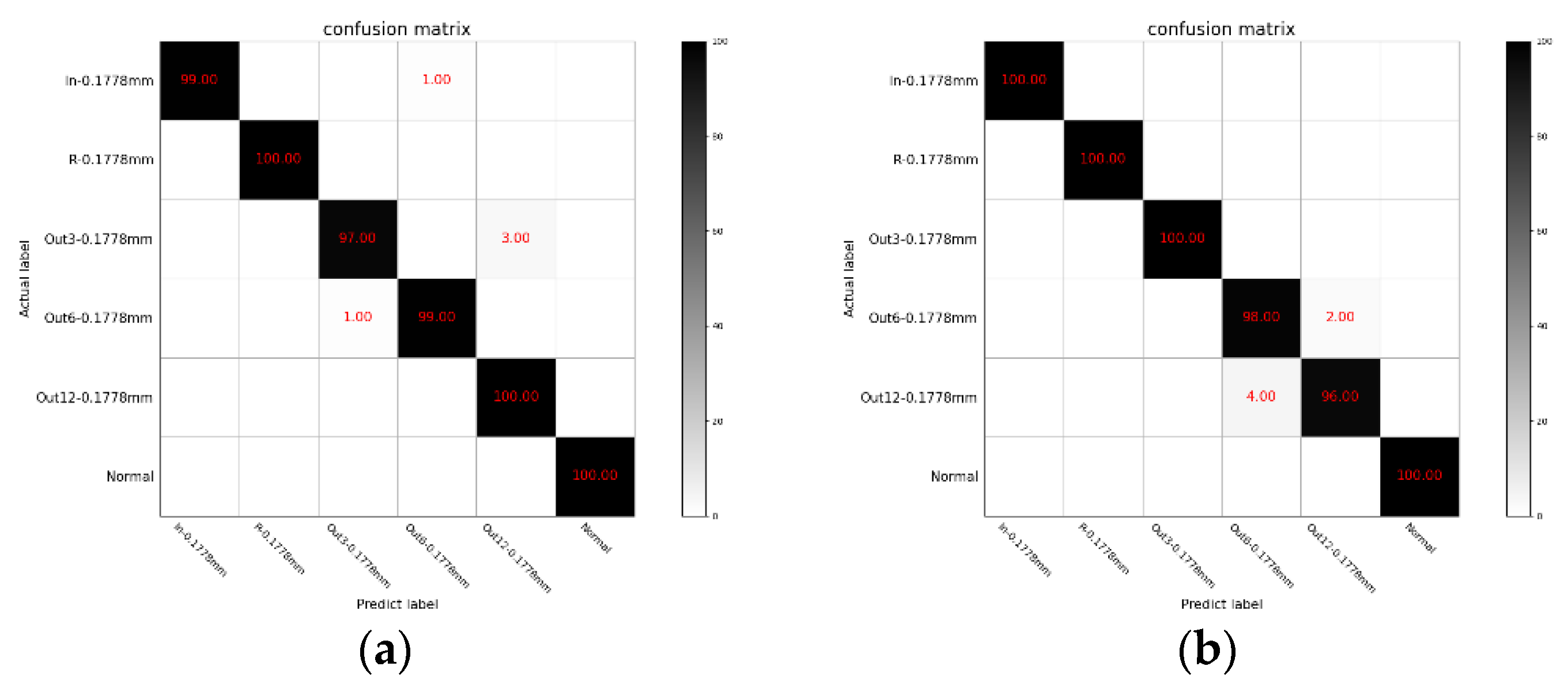
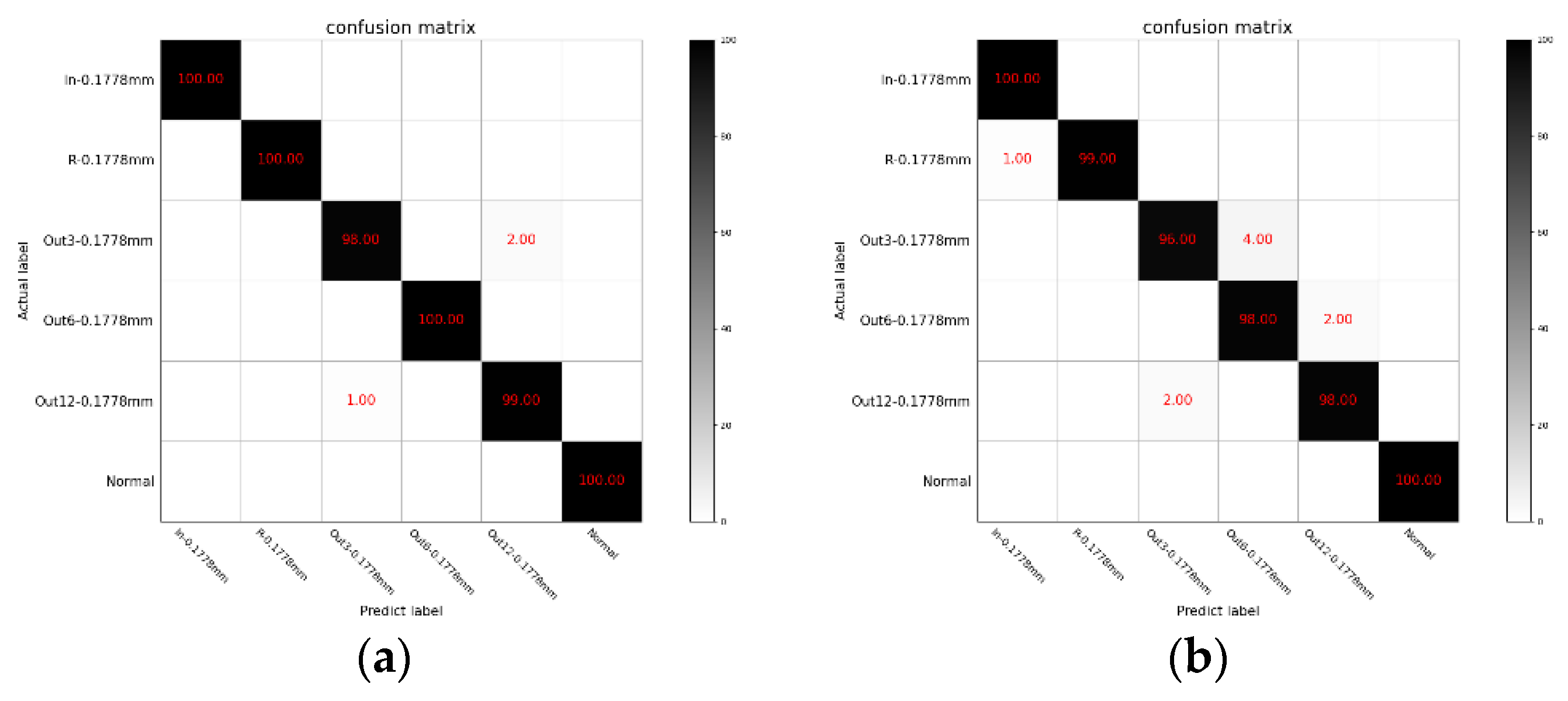
In order to further verify the effectiveness of the method we proposed in dealing with minor faults, we selected 100 groups of fault data (0.1778 mm) in different load states, totaling 2400 test samples. First, the micro faults under different load conditions were tested separately, and the results are shown in
Figure 12 and
Figure 13. Finally, the experimental results corresponding to different loads are shown in
Table 8.
It can be seen from
Table 8 that the method we proposed has a higher accuracy in the identification of minor faults than the other three methods. At the same time, it can be seen from the table that compared with the other three methods, the accuracy rate of the method we proposed can still remain above 96% when judging the three precise fault types that belong to the same minor fault type of the outer ring, but the fault location is different. This greatly improves the accurate judgment of minor faults required in actual production.
In order to further explore the real anti-noise performance of the method we proposed in the actual working environment, we introduced the standard noise library NOISEX-92 in the Signal Processing Information Base (SPIB). The noise data in the library were all collected under the condition of a sampling frequency of 19.98 KHz, and the duration was 235 s. By changing the sampling frequency of the noise signal to 12 KHz, the frequency calibration of the noise signal and the fault signal was completed, and on this basis, the calibrated noise signal was added to the original vibration signal. The experimental results are shown in
Table 9.
As shown in
Table 9, the difference between Method 1 and Method 2 is the signal–image processing method. From the result, we can see that the lowest value of Method 1 is higher than the highest value of Method 2, which shows that the Adaptive Generalized S-Transform we proposed improves noise immunity by extracting more effective features. Comparing Method 1 and Method 3, we can see that our proposed reconstruction component selection criterion improves the anti-interference ability of the whole model by removing the interference components and extracting more fault features. In summary, the method we proposed has been maintained at a higher level and the average accuracy rate is also 7.61–9.60% higher than other methods in the table, which shows that the fault diagnosis method we proposed can better separate fault and noise components.
3.4. Discussion of Experimental Results
As can be seen from
Table 5,
Table 6 and
Table 7, with the deepening of the fault degree (damage diameter), the diagnostic accuracy of the four models is increasing. For faults at different positions with a fault diameter of 0.1778 mm, the accuracy of the method we proposed can reach more than 97%, which is 5–8% higher than the other three models, which shows that the method we proposed has improved the recognition accuracy of minor faults in the case of different fault degrees.
It can be seen from further experiments on different fault types under minor faults that the recognition accuracy of the model we proposed is 0.73–1.4% lower than that of general faults, while the other three models have more than 2%, which shows that the method has strong adaptability to fault identification of different fault degrees. At the same time, it can be seen from the comparative test results under minor faults that the method we proposed enhances the sensitivity of the diagnostic model to minor faults.
Judging from the noise experiment under minor faults, compared with the accuracy rate of the other three models below 92%, the accuracy rate of the diagnostic model we proposed is maintained at about 98%, which shows that the parameter optimization and AGST can extract the more effective fault features and thus improve the diagnostic accuracy in noisy environments.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}