1. Introduction
Complex components with space freeform curved surface are the core structural components in the fields of aerospace, transportation and shipping, etc. Their efficient and high-quality machining has been a worldwide technical problem in the intelligent manufacturing industry. In general, such components have the common characteristics of multi-scale (external dimensions ranging from tens of centimeters to tens of meters [
1]), multi-morphologies (surface types include planes and surfaces with large variations in curvature) [
2], multi-materials (workpiece materials include aluminum, titanium, steel, copper, and even composite materials and special high hardness and high bonding alloy, etc.) [
3,
4,
5,
6], multi-processes (processing forms include milling, grinding, drilling, friction stir welding, etc.) [
7,
8,
9,
10] and so on. This puts forward extremely strict requirements for the mobile machining, composite angle, load, and process integration capability of machining equipment. The development of high-performance five-axis machining equipment for complex curved parts has been at the core of key industry development.
The parallel robot, as one of the most innovative engineering designs in 20 years [
11,
12], has significant advantages, such as compact structure, strong reconfigurability, high stiffness, and precision [
13], which is becoming a potential advantageous solution to the above problems. Existing machining robots with parallel mechanism as the core include Z3 [
14], Tricept [
15], Exechon [
16], Trimule [
17], Metrom [
18], Diarom [
19], Stewart [
20], etc. According to the degree of freedom (DOF) of parallel module, they are divided into 3-DOF, 5-DOF and 6-DOF. In order to realize five-axis machining, 3-DOF parallel mechanisms must be additionally connected with 2-DOF series modules, which makes the robot still inherit some limitations of the series topology. A 6-DOF machining robot has redundancy in the DOF form, which correspondingly increases the cost and difficulty of control. In fact, a 5-DOF parallel robot has the topology form of complete parallel and is the simplest DOF form of five-axis machining, which is particularly suitable for high-quality machining of complex curved components, and has high research and application value.
However, the invention and design of the parallel robot are not that simple, because (1) the multi limbs closed-loop structure of a parallel robot often leads to small workspace and rotation capacity; (2) The multiple driving force screws corresponding to the multiple limbs are prone to singularity in the process of space movement, and the central symmetry of robot layout is extremely difficult to achieve.
To cope with these issues, many scholars have conducted extensive and in-depth research. For example, Wang et al., based on displacement theory and Lie subgroups, proposed several 3R2T parallel robots with large rotation angles [
21]. Bi et al. carried out the kinematic optimization design of a 4-DoF parallel kinematic mechanism by using the performance atlases method [
22]. Brahmia et al. [
23] put forward a dimension design method based on workspace optimization by combining sensitivity analysis. Xu et al. used the transmission workspace index to evaluate the 2R1T over-constrained parallel mechanism Hex4 [
24]. Xie et al. [
25] studied the motion optimization of a 5-DOF spatial parallel mechanism with three kinematic limbs. Based on the inherent high stiffness of the parallel topology form, expanding its workspace and flexibility by means of reasonable hinge design and kinematics optimization is always an important technical choice for the performance design of a parallel robot. As for the layout of the robot, the most classic parallel robots such as Delta, Z3, Tricept, Stewart, etc. all ensure the center symmetry of the robot to a certain extent. Complete symmetry is also the most mature layout form in the robot field. In addition, Metrom and Diarom robots are derived from the Grassmann geometry principle, using a spatial layout of five limbs, and greatly expand the parallel robot rotation capability. This layout adopts an articulated moving platform, which maximizes the movement flexibility of the motorized spindle, but its constraint limbs can only be arranged laterally. Yao et al. developed the 5UPS-PRPU (U-Hooke hinge, P-prismactic pair, S-ball pair, R-rotation pair) six-limbs machining robot [
26], and designed the constraint limb as completely passive, which avoids the drive singularity problem of the active constraint limb in the central layout. This also provides a new research idea for the layout design of the parallel 5-DOF machining robot. In fact, layout is the primary step of robot-specific design, and reasonable limb layout is often an important guarantee of robot performance under complex motion forms.
Combining the existing research and the above problems, this paper proposes a novel six-limb 5-DOF parallel machining robot with spatial layout. Its constrained limb is designed to be completely passive and centrally arranged. The five unconstrained limbs are spatially arranged according to the Grassmann geometric principle, and the moving and fixed platforms are also correspondingly divided into spatial multi-layer structures. Aiming at the two specific realization forms of the robot, this paper adopts three performance indices, namely workspace, transmissibility and mass, and realizes the kinematic optimization design of the robot through multi-objective optimization and intelligent algorithm. Finally, the static performance is verified by finite element simulation.
The remainder of this paper is organized as follows.
Section 2 analyzes the topology type and layout form of the robot.
Section 3 establishes the kinematic model of the robot.
Section 4 realizes the optimal design and comparison of two type robots with different layouts. In
Section 5, the more optimal virtual prototype is verified by static simulation. Lastly,
Section 6 draws the conclusions.
2. Topology Design and Mechanism Description
Five-axis machining is a mode of NC machining. According to ISO, when describing the motion of NC machining, the right-hand rectangular coordinate system is used. The coordinate axis parallel to the spindle is defined as the z axis, and the rotation coordinates around the x, y, and z axes are A, B, and C, respectively. Generally, 5-axis linkage refers to linear interpolation movement of any five coordinates in x, y, z, A, B and C. For machining forms such as milling and drilling, the rotation around axis C does not affect the position and orientation of the tool center point (TCP). Therefore, the parallel five-axis machining robot discussed in this paper has three translation and A/B rotation (3T2R) 5-DOF motion.
According to the finite screw theory [
27], the finite motion of the robot discussed in this paper is the intersection of the finite motion at the end of six limbs:
Therefore, the robot has five 6-DOF unconstrained limbs and one 3T2R 5-DOF constrained limb. The continuous motion of the
kth limb of the parallel robot is expressed by the screw trigonometric product of multiple single degree of freedom motion pairs:
where
represents the finite motion of the
ith kinematic joint of the
kth limb. Depending on the type of joint, it can be described as:
where
and
are angular and linear displacements, respectively.
characterizes the motion axis characteristics of each kinematic joint and
is the position vector. Therefore, the finite motion of each limb of the parallel machining robot discussed in this paper can be described as:
Equations (4) and (5) describe the standard forms of motion for unconstrained and constrained limbs, respectively. Based on the finite screw theory, the structural synthesis of robots can be realized by changing the position/type of pairs in the standard form. For example, in-plane linearly independent moving axes can change position, and two R pairs with parallel axes can produce a circular translation to replace the P pair.
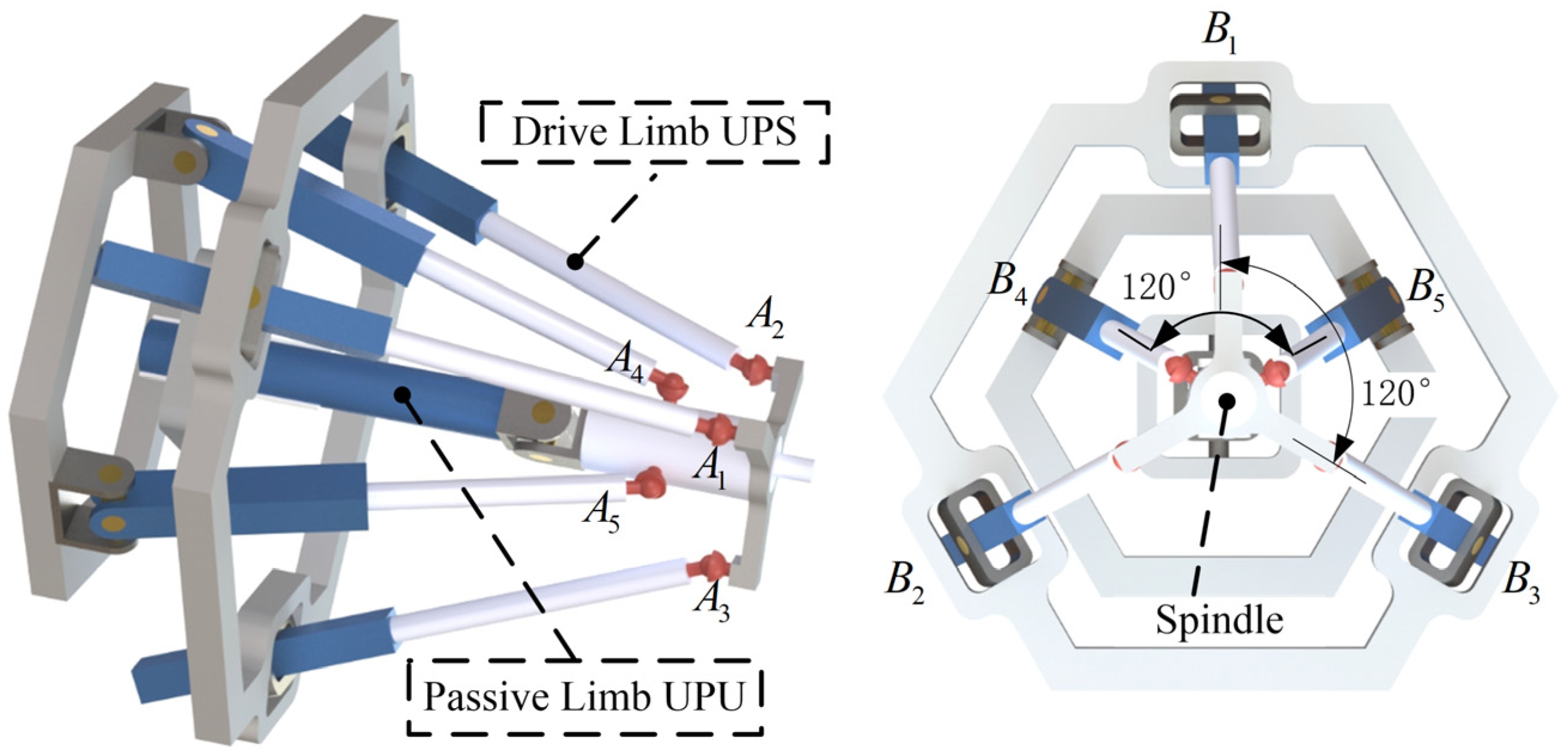
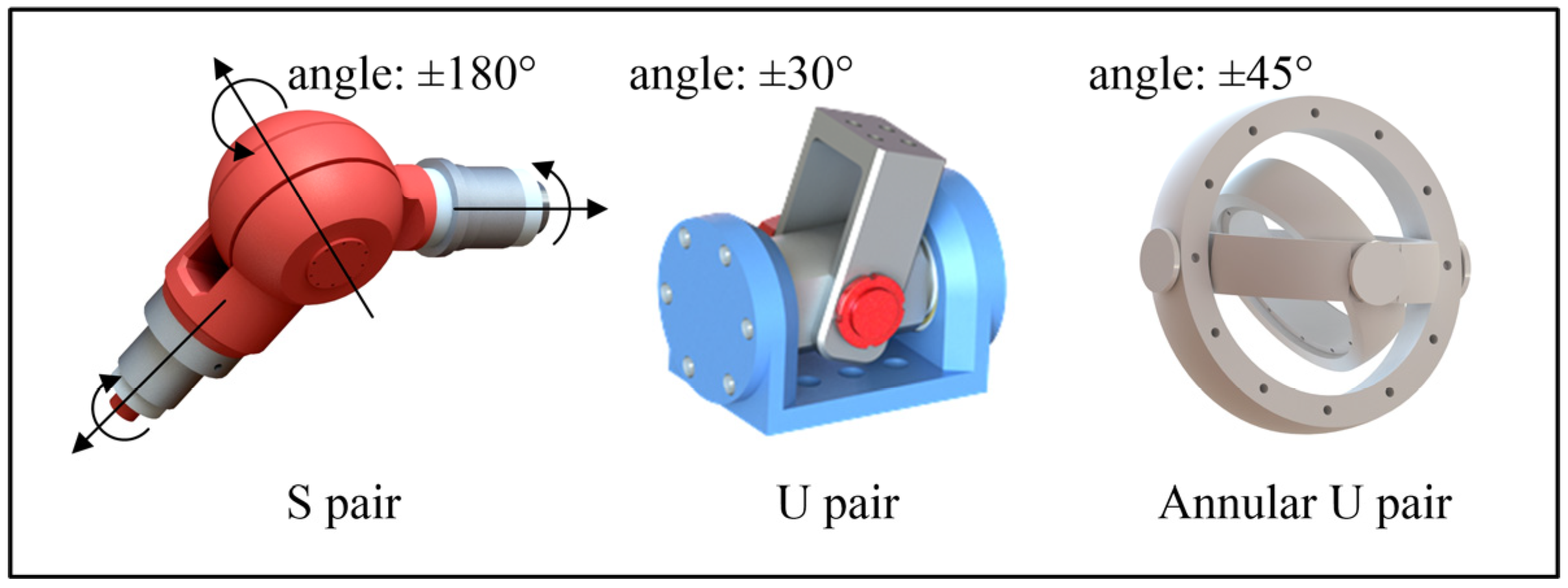
Therefore, the unconstrained limb can be synthesized into PPPS, PRPS, PUS, UPS, etc., and the constrained limb can be synthesized into UPU, PRPU, PPPU, etc. The sequence of motion pairs in each branch chain can be changed. Among them, P pair is divided into active and passive types, which is composed of a linear slide rail and a possible drive lead screw. It has the characteristics of high rigidity and large space proportion. The S pair, U pair and R pair are composed of bearings and shafts. They are small and difficult to drive, usually as passive joints. For the parallel 5-DOF machining robot, the force on each limb should be balanced and the volume should be small to avoid limb interference. The real accuracy, static, and dynamic performance of a robot is often affected by joint clearance, error, link flexibility, etc. The robot design should have the least possible number of joints and links. Therefore, the computer aided design model of the parallel robot discussed in this paper is shown in
Figure 1. Its moving platform is connected to the base through six limbs. Five drive limbs are the same, and all of them are UPS limbs with P pair as the drive joint. The 6th limb is a completely passive UPU limb, which is installed at the symmetric center of the mechanism. The robot only has 12 joints and 6 links, which greatly guarantees the accuracy and dynamic performance.
From the perspective of force form, the five UPS limbs are driving limbs, and their driving forces are the axial tensile/compressive force of the lead screw. The UPU limb is a 3T2R passive limb, which provides a rotation constraint in the normal direction of the U pair, and its constraint force is an instantaneous wrench. The constrained limb is located at the symmetrical center of the robot and has the shortest length in geometry, which can provide excellent torsional strength. The stiffness design of the cylindrical passive constrained limb has also been well verified on existing robots such as Tricept and T5 [
28]. Therefore, the topology design of the six-limb parallel machining robot discussed in this paper has mechanical rationality. At the same time, the U pair at the end of the UPU limb is located at the symmetrical center of the moving platform, and the
A/B two-way rotation capability of the robot is relatively flexible.
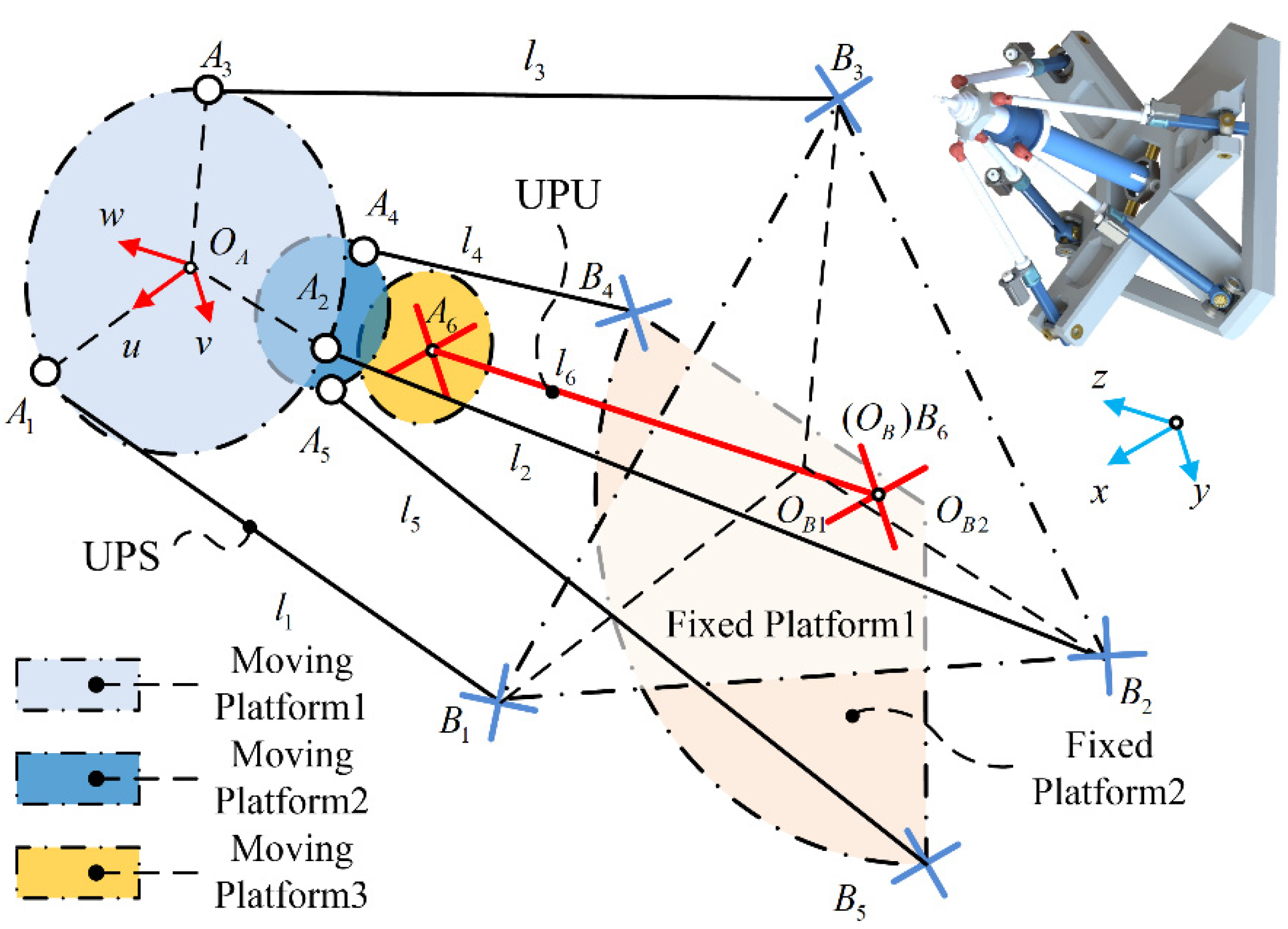
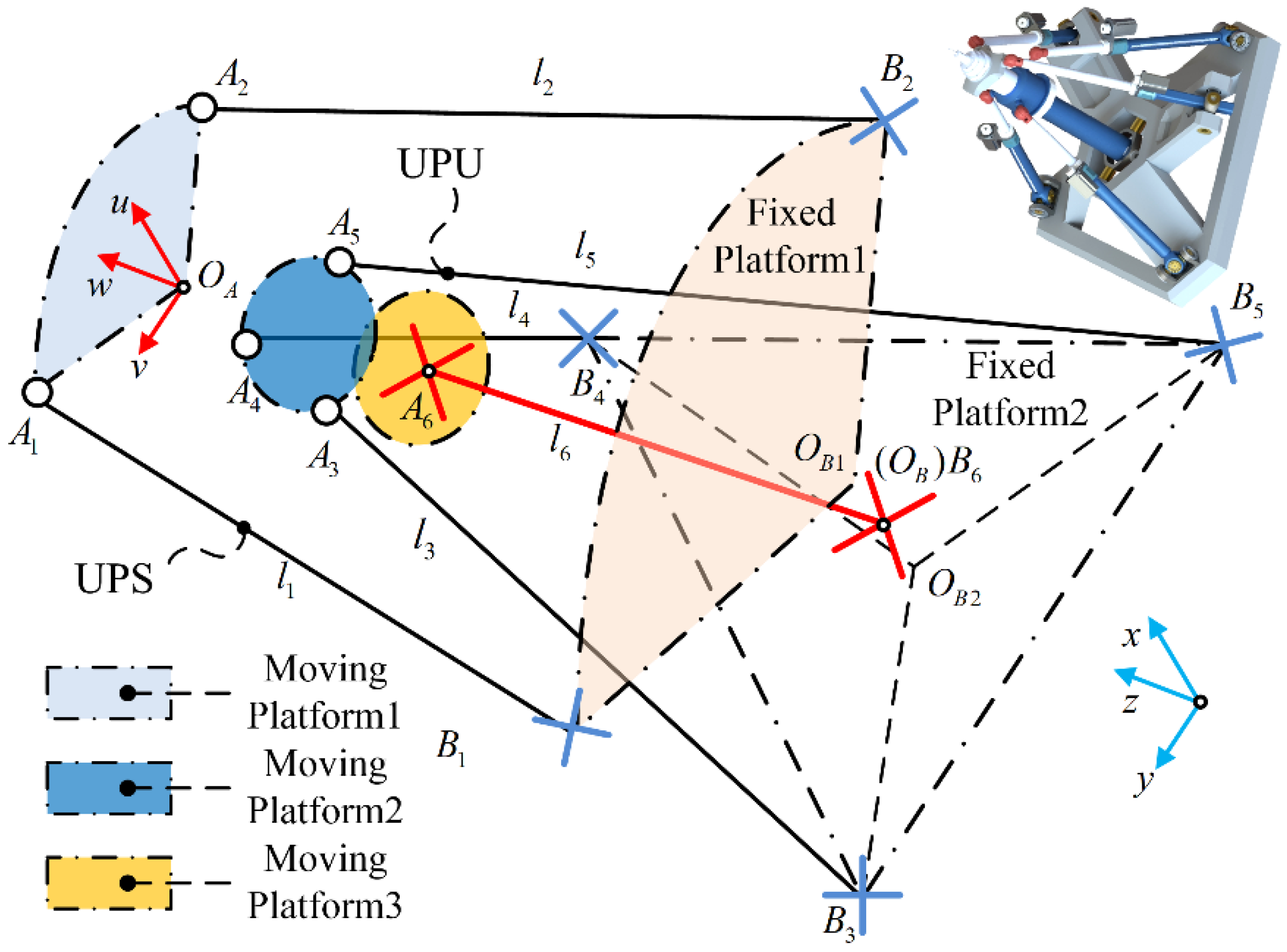
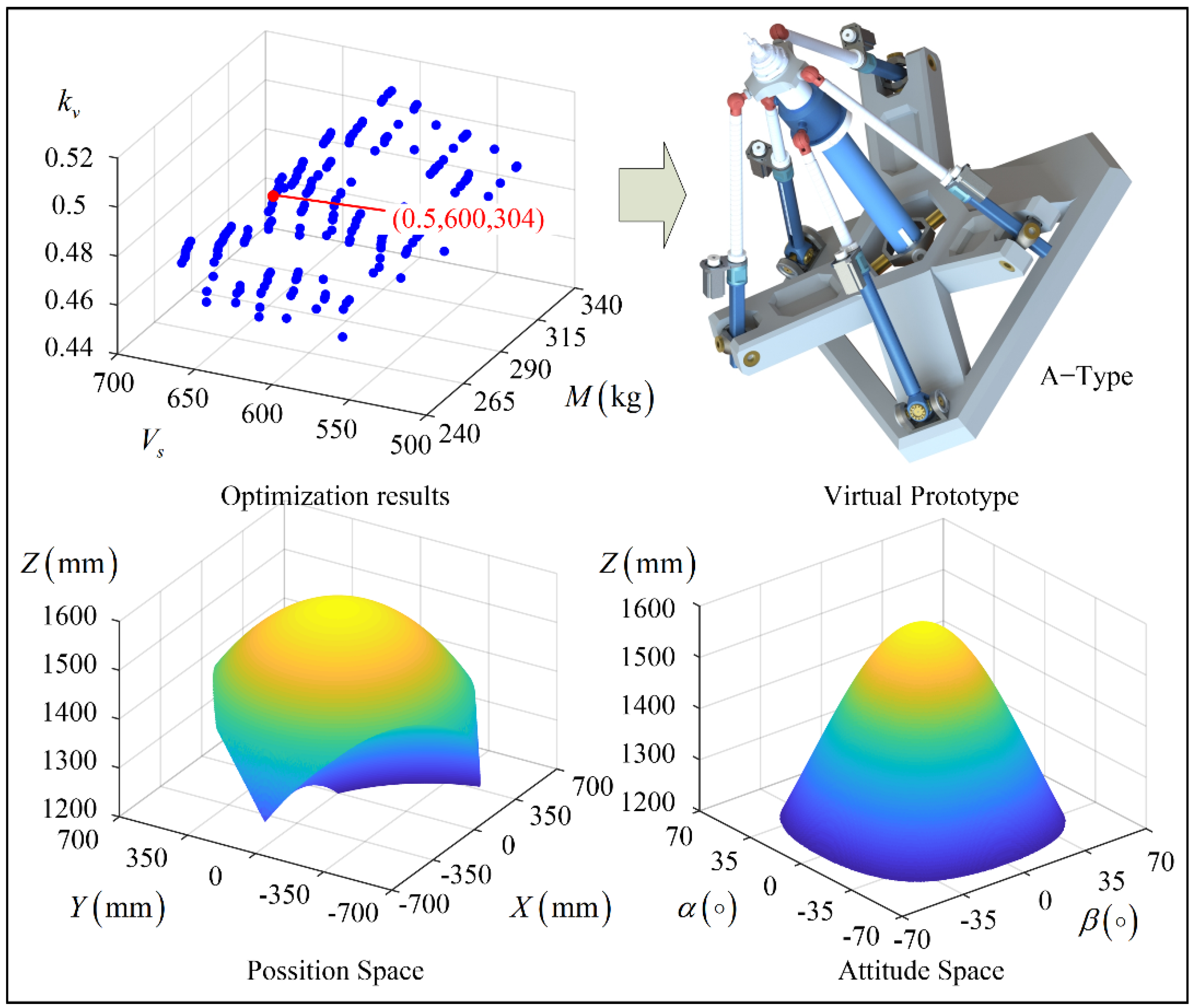
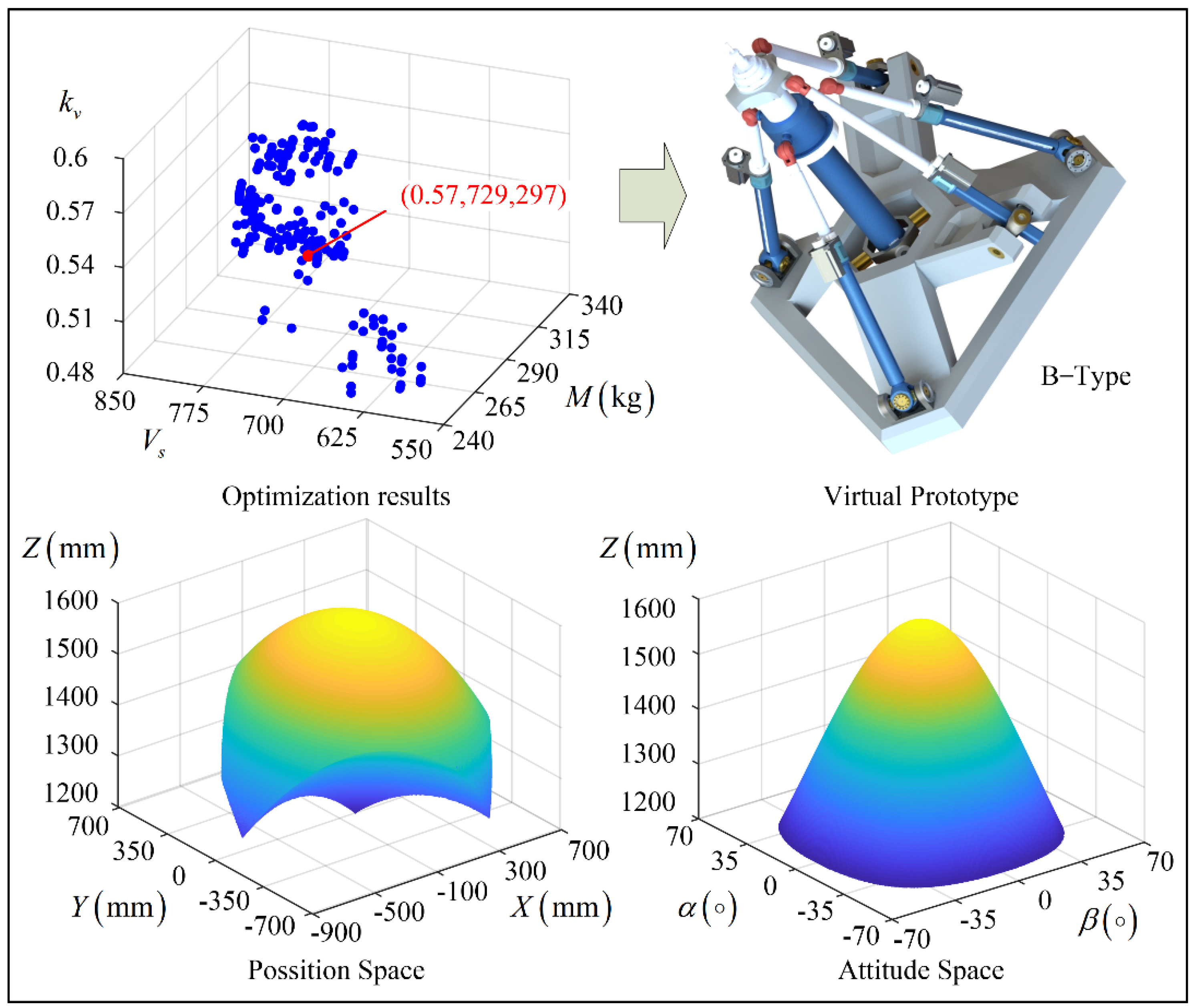
From the perspective of layout, the robot discussed in this paper has a spatial layout structure, and its moving and fixed platforms are divided into three layers. Moving platforms 1 and 2 are installed at the head and end of the motorized spindle, respectively. The distance between moving platform 3 and moving platform 2 is determined by the electrical circuit of the motorized spindle. Fixed platform 2 is the installation surface, and the three layers of fixed platforms together form a number of space triangle structures, which have mechanical stability. According to the different distribution modes of the hinge points of five UPS limbs on the multi-layer moving and fixed platforms, the robot discussed in this paper has two layout forms, A and B, as shown in
Figure 2 and
Figure 3, respectively. Among them, three UPS limbs of the A-type robot are connected to moving platform 1, and two UPS limbs are connected to moving platform 2. The type B robot is the opposite. The difference between the two layout forms leads to different contributions of each unconstrained limb to the overall position, rotation ability, and static performance of the robot, which is the focus of this paper.
4. Optimal Design
4.1. Optimization Index
The performance optimization design of robot is a typical multi-parameter, multi-objective and multi-constraint problem. For the parallel 5-DOF machining robot discussed in this paper, larger workspace, better kinematics performance, and lighter mass are the goals of its optimal design.
For the workspace of the robot, the maximum z direction operation capacity is determined by the limit travel of the P pair in the constrained limb UPU. In this paper, according to the requirements of engineering applications, it is given as 400 mm. Therefore, the square root of the maximum
xy working capacity can be defined as the workspace index of the robot.
Kinematic performance of robot can be characterized by transmissibility [
30]. By rewriting Equation (16), the twist of the robot can be expressed as:
where
is the magnitude of
.
and
are from
The instantaneous power of the robot is given as:
where
is the intensity of the actuation wrench.
The kinematics performance of the robot can be evaluated by the mean value of the minimum transmissibility in the whole workspace, which can represent the transfer efficiency of the robot motion/force.
The design mass of the machining robot only considers the moving parts that contribute inertia. Therefore, the mass index of the robot is defined as follows:
where
,
,
,
and
, represent the mass of the moving platform, U pairs, S pairs, P pairs, and links, respectively.
4.2. Optimization Models and Algorithm
Based on the above indicators and analysis, this paper establishes a multi-objective model with workspace, kinematic performance, and moving parts mass index as optimization objectives, and AB rotation ability, dimension parameter range, and maximum mass as constraints.
For the problem described in Equation (30), NSGA-II algorithm [
31] can be used for iterative solution according to our accumulated experience [
32]. NSGA-II algorithm is one of the most popular multi-objective genetic algorithms. It reduces the complexity of non-inferior sorting genetic algorithms, and has the advantages of fast running speed and good convergence of the solution set. The settings of the algorithm are as follows: the initial parameters are determined by random functions, 40 populations are used, and the algorithm is run to 100 generations. The probabilities of crossover and mutation are 0.9 and 0.1, respectively. The crossover distribution and mutation distribution index are 10 and 20, respectively. The failed run penalty and objective value are
.
The Pareto frontier solution set obtained by multi-objective optimization can select the final result according to the cooperative equilibrium principle.
where
is the
ith target.
and
are the mean and variance of the target, respectively.
is the minimum point of the target, namely the virtual ideal point.
is the distance from the Pareto frontier point to the ideal point. The point with the smallest
value is the optimal solution with the best performance-matching relationship.
4.3. Optimization Parameters
According to
Figure 2 and the previous analysis, the 5-DOF parallel machining robot discussed in this paper has the advantages of approximate center symmetry and flexible movement. The main dimension parameters include the radius of the circumscribed circle of the multi-layer moving and fixed platforms, the relative distance of the multi-layer fixed platforms, and the distance h of the moving and fixed platforms under the initial configuration.
The design range of each dimension parameter is shown in
Table 1, where the radius of the fixed platform is 800 mm to 1200 mm, the radius of the moving platform is 150 mm to 300 mm, the distance of the multi-layer fixed platforms is –400 mm to 400 mm, and h is 1000 mm to 1400 mm. The minimum radius of the moving platform is determined by the outer diameter of the spindle and the structural size. The maximum radius of the fixed platform and the maximum distance between moving and fixed platforms are limited by volume. In addition, the maximum radius of the moving platform is limited by the mass of moving parts.
4.4. Optimization Result
With the help of MATLAB and Isight software, the optimization results for A and B type layout robots are carried out. The optimization results are shown in
Figure 5 and
Figure 6. Among them, the total number of solutions for the A-type robot is 4000, including 270 Pareto frontier solutions, and the total number of solutions for the B-type robot is 4000, including 246 Pareto frontier solutions.
The dimensionless method is then applied to the objectives on the Pareto frontier by Equation (29). The distance from Pareto points to the ideal optimum is calculated by Equation (30). The cooperative equilibrium point is determined as the Pareto point with minimal distance to the ideal point.
The values of , , , and rotation ability for the A-type robot at cooperative equilibrium point are 0.5, 600, 304, and ±53°, respectively. The values of , , , and rotation ability for the B-type robot at cooperative equilibrium point are 0.57, 729, 297, and ± 53°, respectively. Obviously, the performance of the B-type robot is better than that of the A-type robot.
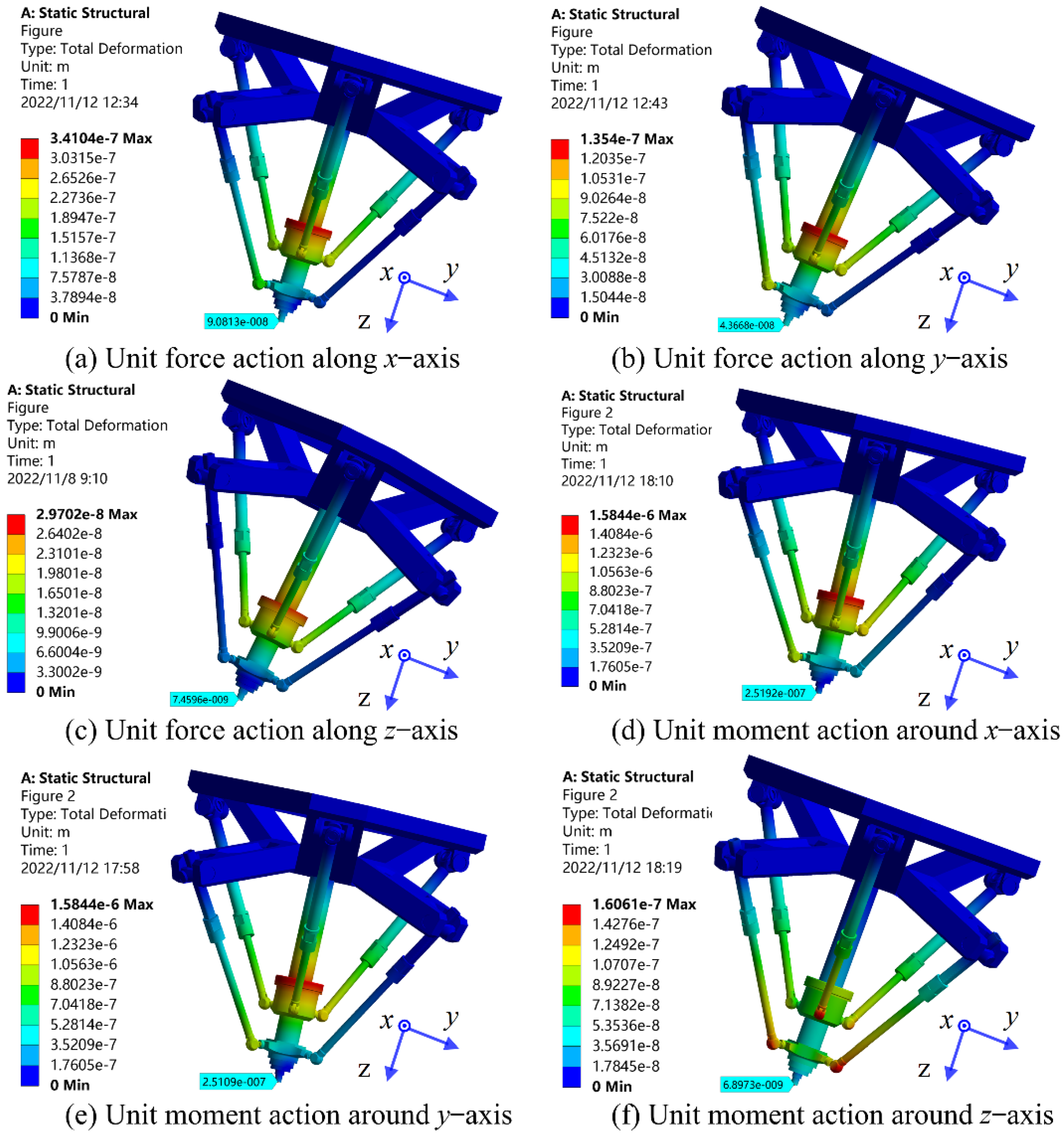
6. Conclusions
In this paper two novel parallel five degree of freedom (5-DOF) machining robots with spatial layout are proposed. This kind of robot has six motion limbs arranged in space, five of which are UPS limbs and one is a UPU limb. The robot is approximately centrally symmetric, with reasonable constraint and driving wrench design, and greatly releases the flexibility of the spindle. Kinematic optimization design of two robots is carried out by multi-objective optimization method and intelligent algorithm. The optimized design results show that the B-type layout has better kinematics performance. Lastly, the static performance of the optimal virtual prototype is verified by the finite element software. The numerical simulation demonstrates that the designed 5-DOF machining robot offers satisfactory static behavior and flexibility, which is of significant application value.
In the future, we will further optimize the weak rigid joint in the existing structures to develop engineering prototypes with better performance. Further, more topology types, layout forms, and performance indicators will be discussed.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}