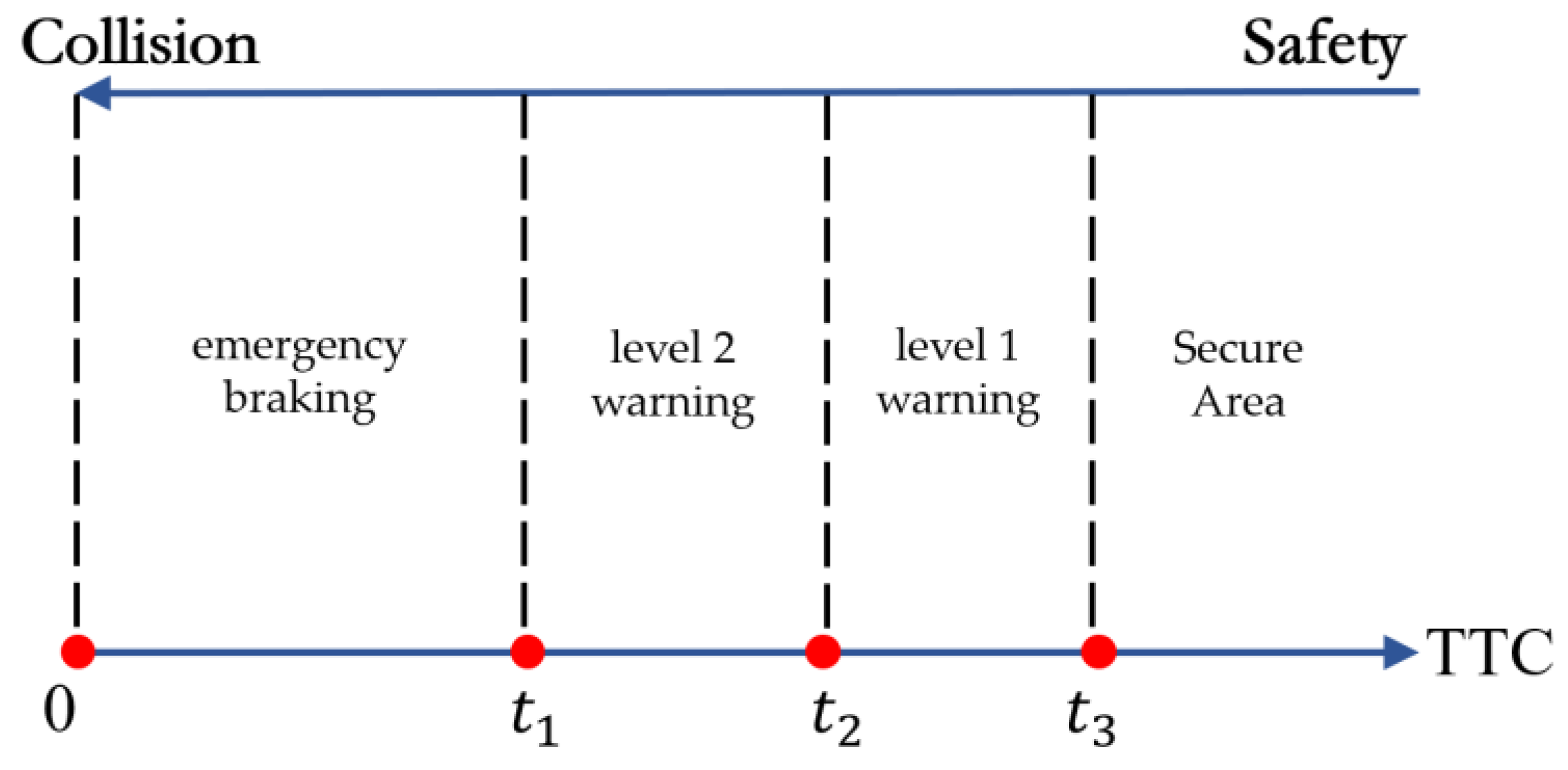
In this paper, the safety level of the vehicle is divided into “secure area (SA)”,” level 1 warning (L1)”, “level 2 warning (L2)”, and “emergency braking (EB)” in terms of time and space, as shown as
Figure 12. SA means that the AEBS system does not need to perform any action, L1 means that the AEBS emits an audible sound or flashes an indicator light to alert the driver of a possible safety risk, L2 means that the driver does not perform a braking operation, and the AEBS brakes with a small deceleration to alert the driver, while eliminating the gap in the braking system and preparing for the possible emergency braking that follows. EB means that the vehicle brakes with the maximum deceleration that the AEBS can achieve to ensure the safety of the vehicle.
2.3.1. TTC Calculation and Braking Deceleration Decision
A combination of the safety time model and safety distance model is used for the control of braking intervention. First, the safety distance model is used to determine the L2 warning distance from the vehicle, and then the time to collision (TTC) equation, which considers the relative acceleration, is used to calculate the current TTC value as the threshold value for the AEBS to trigger the secondary warning; this is used to determine the time point for the braking intervention. The relative motion process of the two vehicles is simplified, i.e., the host vehicle and target vehicle are in linear motion maintaining the current velocity and acceleration until the two vehicles collide.
where
is the relative velocity,
is the relative acceleration,
is the relative distance,
, and
is a constant and is greater than the set TTC threshold value.
In the AEBS emergency braking stage, using the tire-road friction coefficient and the influence of road grade, the ground can provide the maximum braking deceleration as follows:
where
is the gravitational constant,
is the tire-road friction coefficient, and
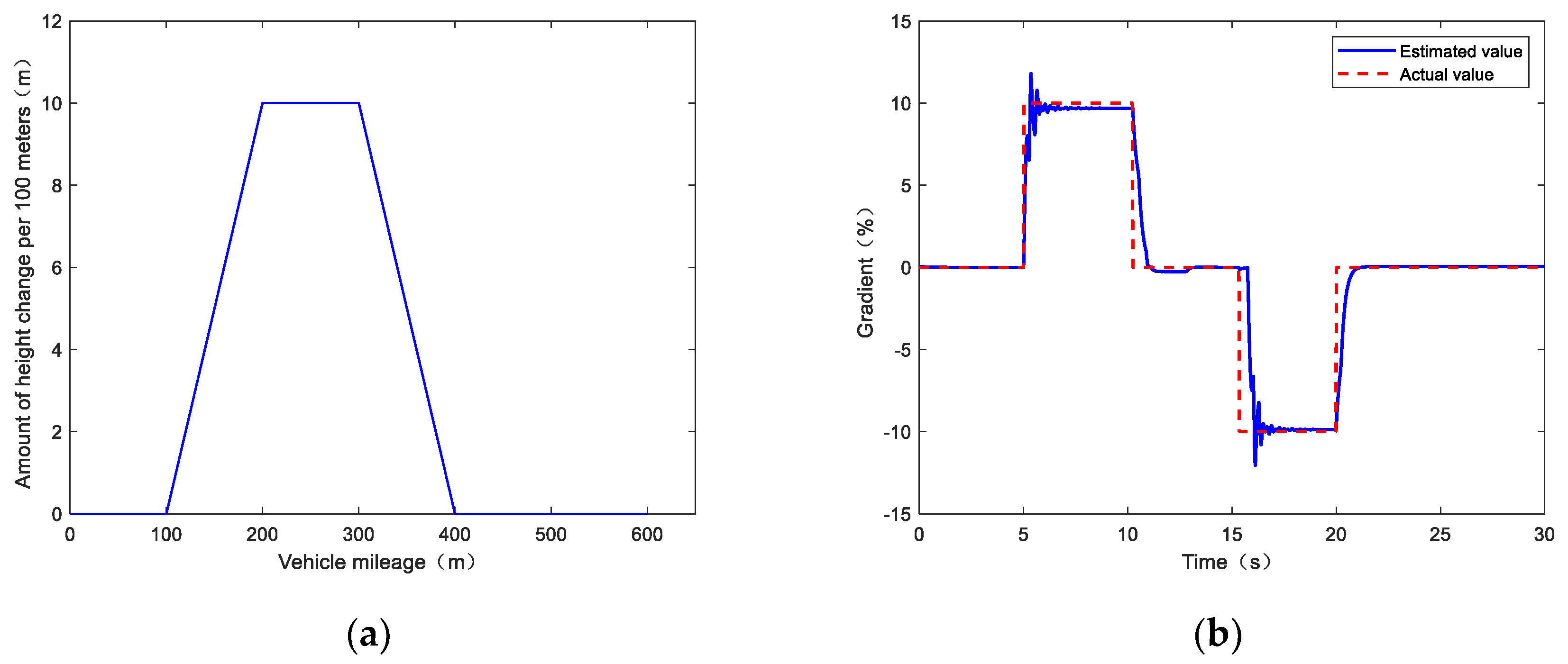
is the road grade.
In addition, NHTSA collected data on the driver’s braking deceleration during braking [
26]. From the statistics, it is clear that the average value of driver braking with a deceleration of
(
) cumulatively was 95%.
To take into account the braking habits of the driver, the driving experience, and the collision avoidance effect of the AEBS, the braking deceleration during emergency braking of the AEBS is determined as follows (unit:
):
On low friction coefficient roads, the braking deceleration cannot reach , and the braking deceleration at this time is determined as the maximum value that the ground can provide. On high friction roads, the braking deceleration is determined as . Since there is a gap in the actuator of the commercial vehicle pneumatic braking system, which will cause a delay in the deceleration response, a certain brake deceleration is applied to the vehicle in the L2 stage to make the vehicle eliminate the braking gap and thus improve the pressure response speed in the emergency braking stage. Here, the braking deceleration of the AEBS in the secondary warning stage is determined as .
The braking deceleration and vehicle status for each stage determined in this paper are shown in
Table 6.
2.3.2. Braking Intervention Decision
According to
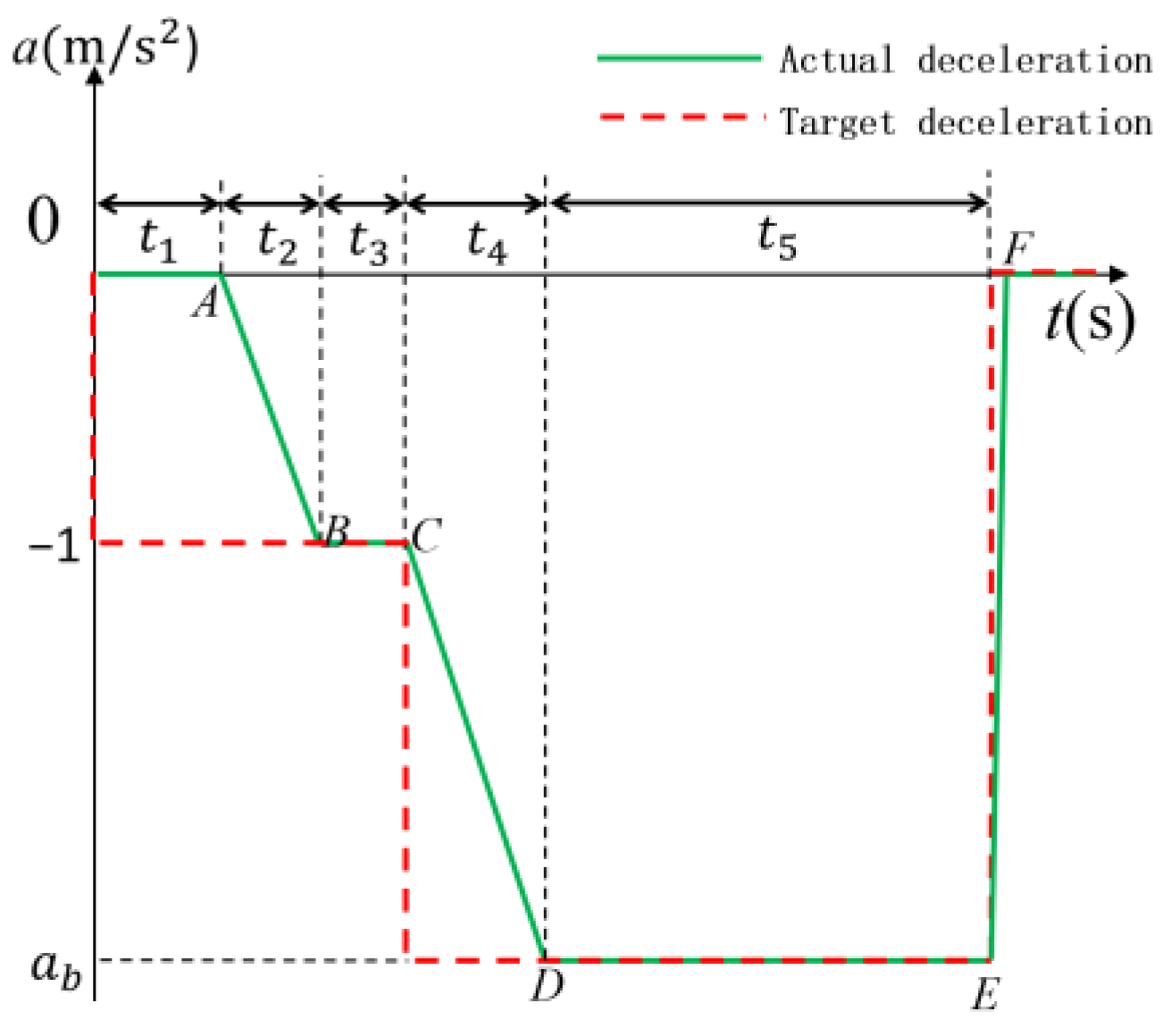
Table 6, we can divide the decelerated speed–time course curve of the vehicle during an AEBS system operation into six stages, as shown in
Figure 13, in which the red dashed line is the current target decelerated speed of the vehicle and the green solid line is the actual decelerated speed of the vehicle. The six stages are OA (brake coordination), AB (deceleration growth), BC (continuous braking), CD (decelerated growth), DE (continuous braking), and EF (brake release). The target deceleration, vehicle speed, braking distance, and time required for each phase are shown in
Table 7.
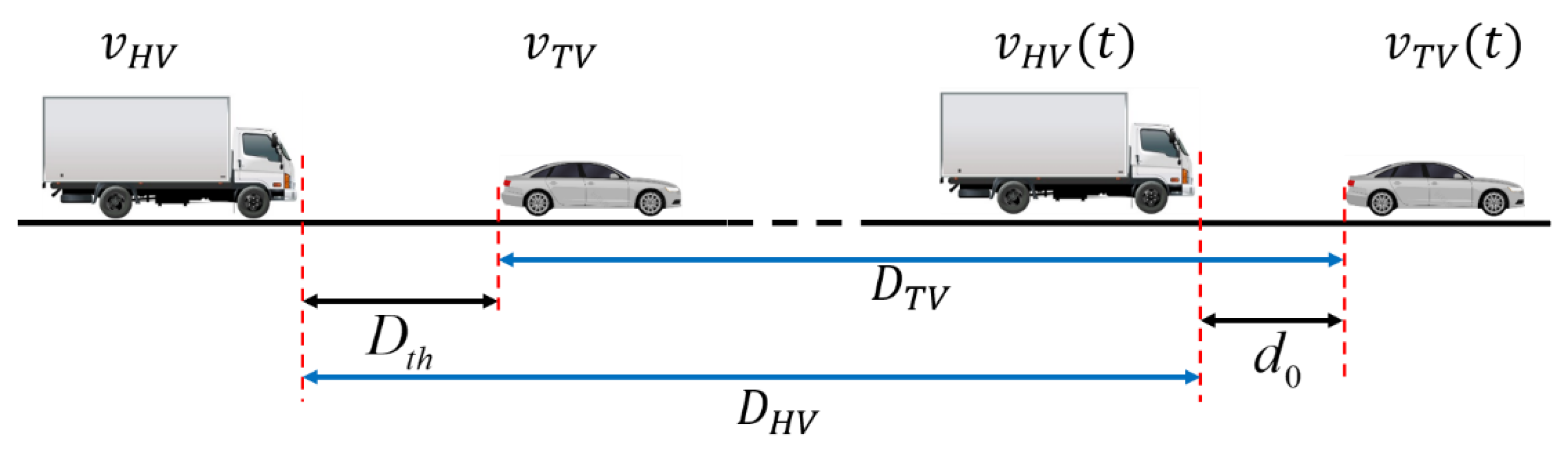
The distance between the host vehicle and the target vehicle in front of the AEBS during braking is shown in
Figure 14. When
and the relative distance is greater than
, the host vehicle enters a safe state and the AEBS releases the brake.
The L2 distance
is defined as follows: when the relative distance between the two vehicles is
, the AEBS enters the L2 stage and brakes according to the braking process described above. When the speed of the two vehicles is the same, the distance between the host vehicle and the target vehicle is
, and
is the critical L2 distance. Its calculation equation is as follows:
where
is the reserved safety distance,
is host vehicle braking distance, and
is the driving distance of the target vehicle during the host vehicle braking process.
The reserved safety distance should be selected moderately. If is too large, it will hinder the efficiency of passage; if it is too small, it will affect collision avoidance. After comprehensive consideration of braking safety and efficiency factors, the reserved safety distance was determined to be 5 m.
Since the CCRb2 condition cannot predict the speed of the target vehicle
after braking, in order to improve the safety of the AEBS, the speed when the brakes are released from the vehicle in the CCRb2 condition is set to 0. The speed when the brakes are released from the AEBS in the rest of the conditions is the same as that of the target vehicle.
From the above analysis, the critical L2 distance is determined under different working conditions.
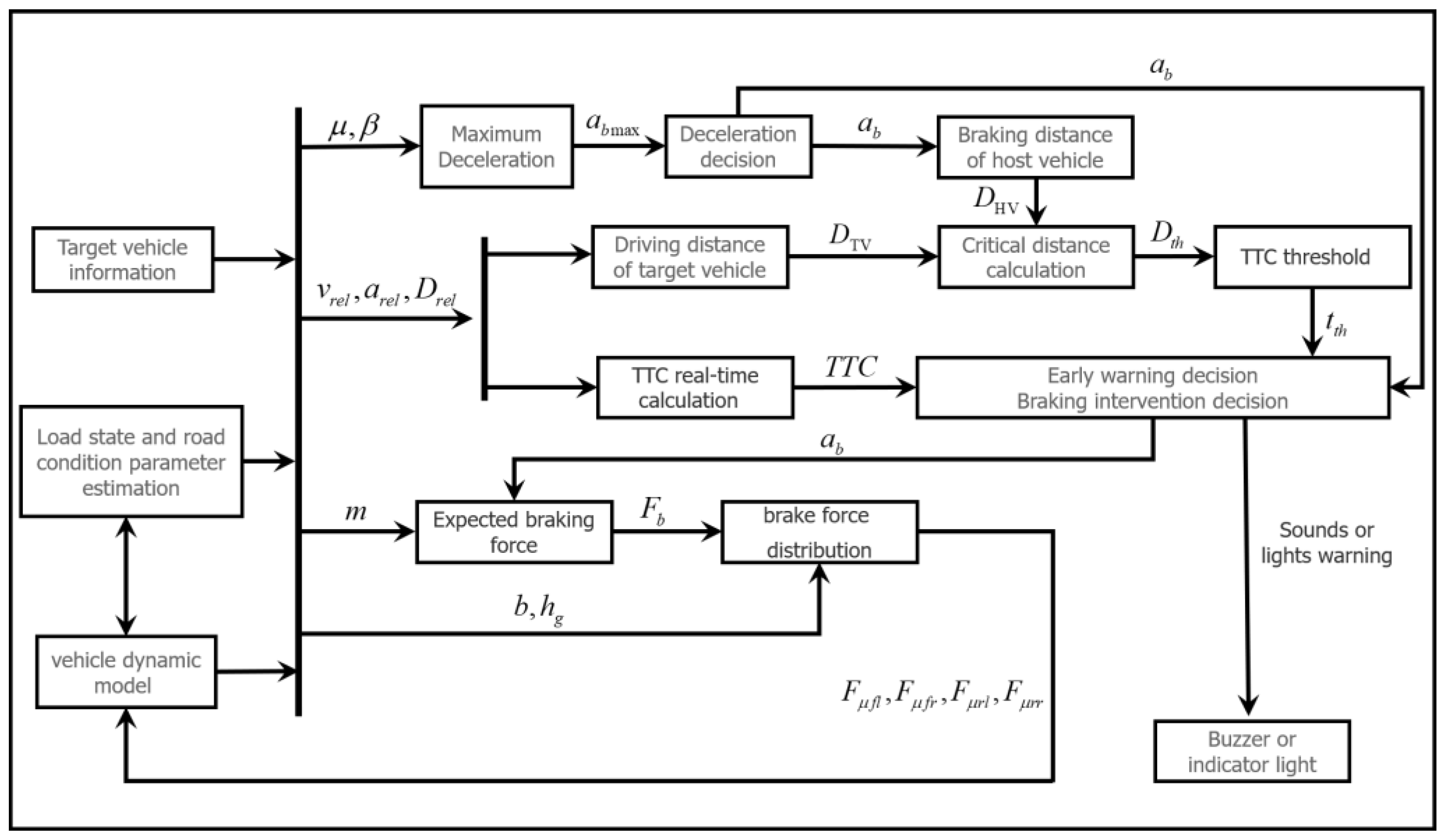
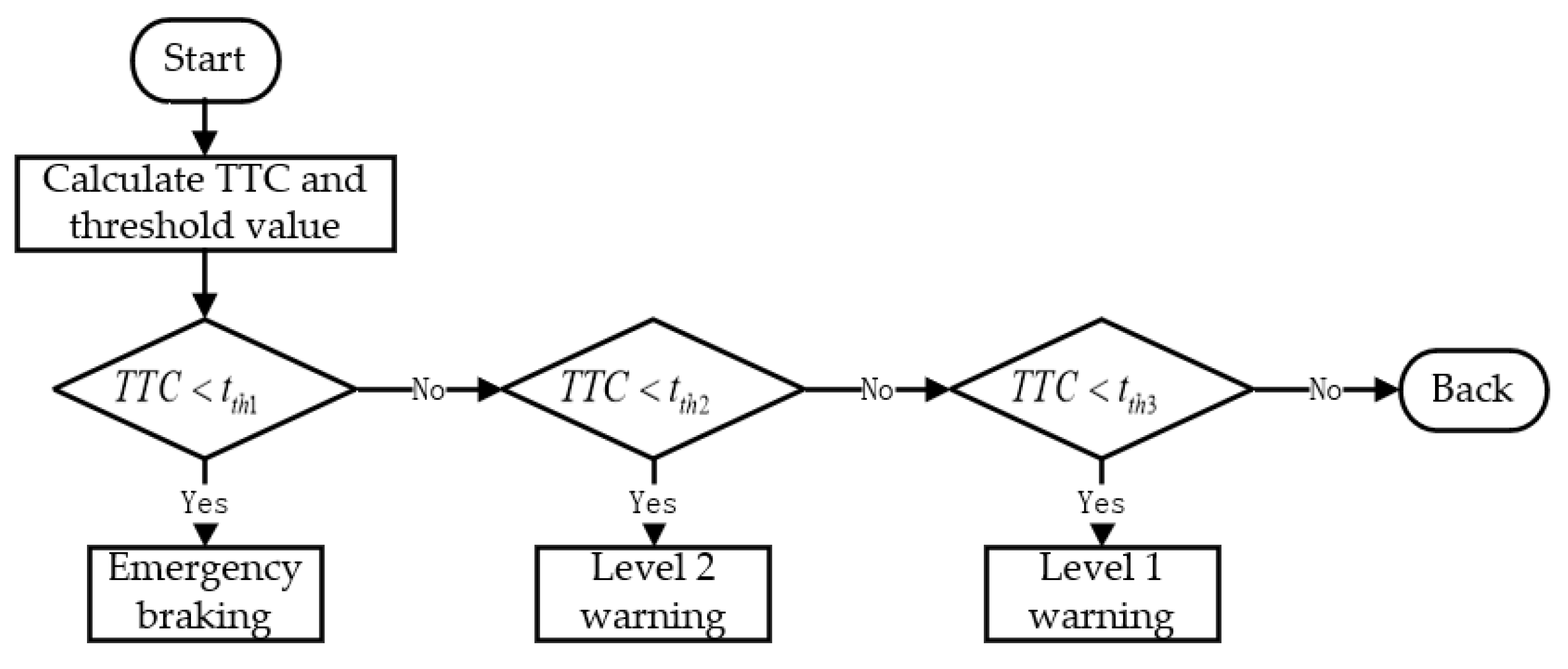
The TTC-based AEBS warning and emergency braking control flow used in this paper are shown in
Figure 15.
Therefore, the task of the braking intervention timing decision is to determine the TTC threshold values for the primary warning stage, the L2 distance stage, and the emergency braking stage.
From the above analysis of the braking distance between the host vehicle and the target vehicle, it is clear that the AEBS enters the L2 stage and brakes when the relative distance between the two vehicles is , and the two vehicles are finally separated by . Therefore, is substituted into the TTC calculation equation, and the TTC value at this time is the threshold value for the L2 stage of the AEBS.
The TTC threshold value for the L2 stage determined by
is as follows:
In addition, taking into account braking safety and the driving experience, the warning time and emergency braking time of the AEBS are specified as follows:
When the TTC is greater than 4.4 s, the AEBS should not issue a collision warning. The emergency braking phase should not start before the TTC is greater than 3 s. L2 is 0.8 s before the start of emergency braking, with two modes of acoustic, optical, and tactile warning. L1 is 1.4 s before the start of emergency braking, with one mode of acoustic, optical, and tactile warning. The threshold value of the second level of warning should be less than 3.8 s.
The threshold value of the second level of warning should be less than 3.8 s.
In summary, on the basis of the warning time defined by the driving experience and the TTC threshold values for the L2 stage calculated using Equation (30), the TTC threshold values for the primary warning stage, the L2 stage, and the emergency braking stage are determined as shown in
Table 8.
In summary, this paper uses to invert the TTC threshold value of the L2 stage of the vehicle AEBS and finally determines the TTC threshold value of each stage, so as to improve its working condition adaptability and the driver’s trust in the AEBS.
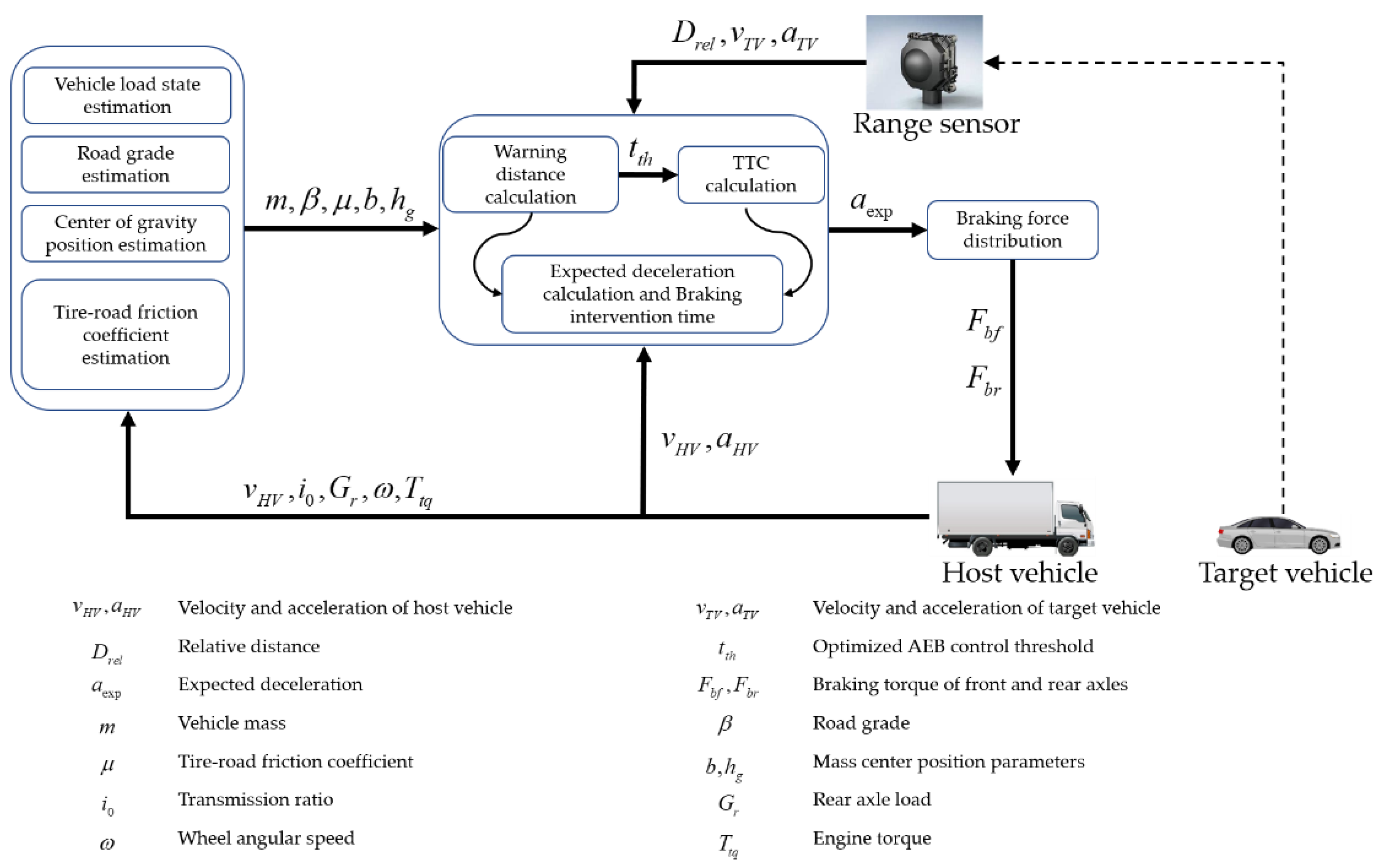
2.3.3. Braking Force Distribution Strategy
The braking force distribution between the front and rear axles affects the braking safety of the vehicle. During braking, if the rear wheels are held first, the rear axle may slip sideways, and if the front wheels are held first, the vehicle will lose steering ability. Therefore, the braking force distribution strategy should be reasonably designed to ensure that the front and rear wheels are held at the same time while making full use of tire–road friction to improve the braking stability and safety of the vehicle [
29].
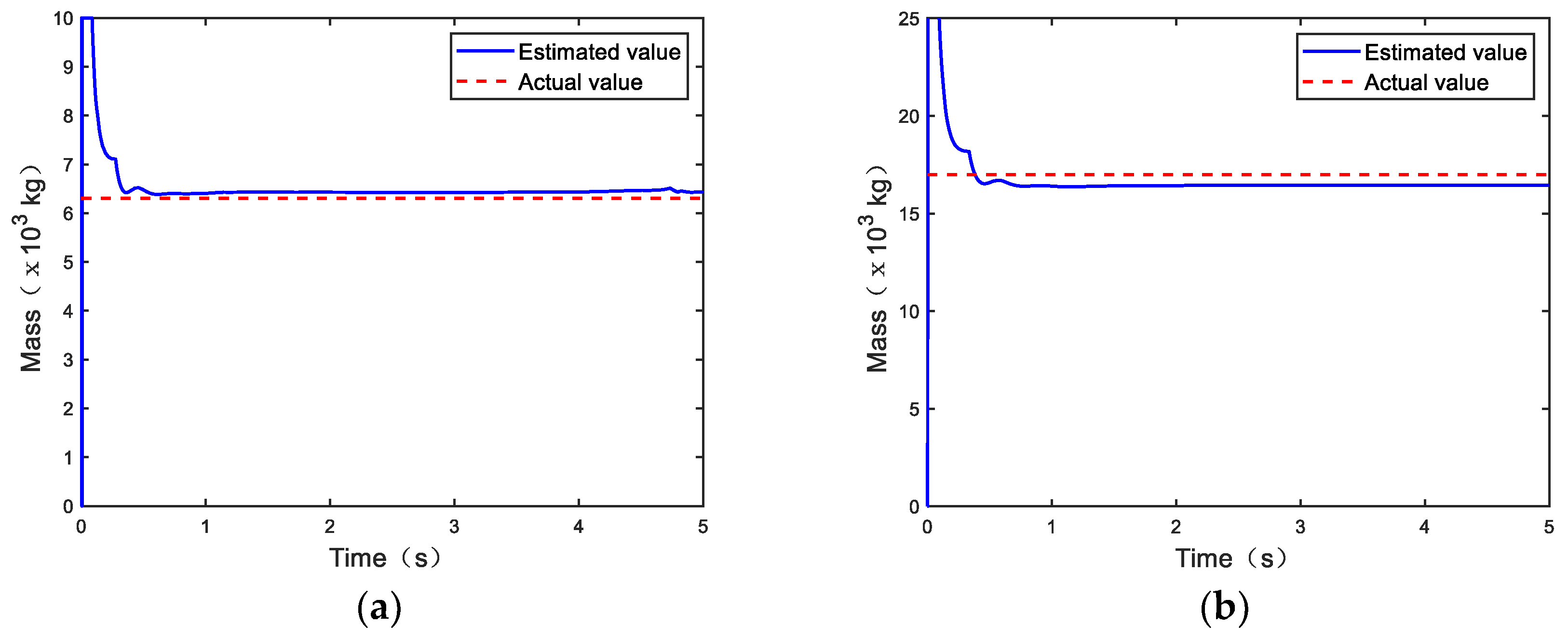
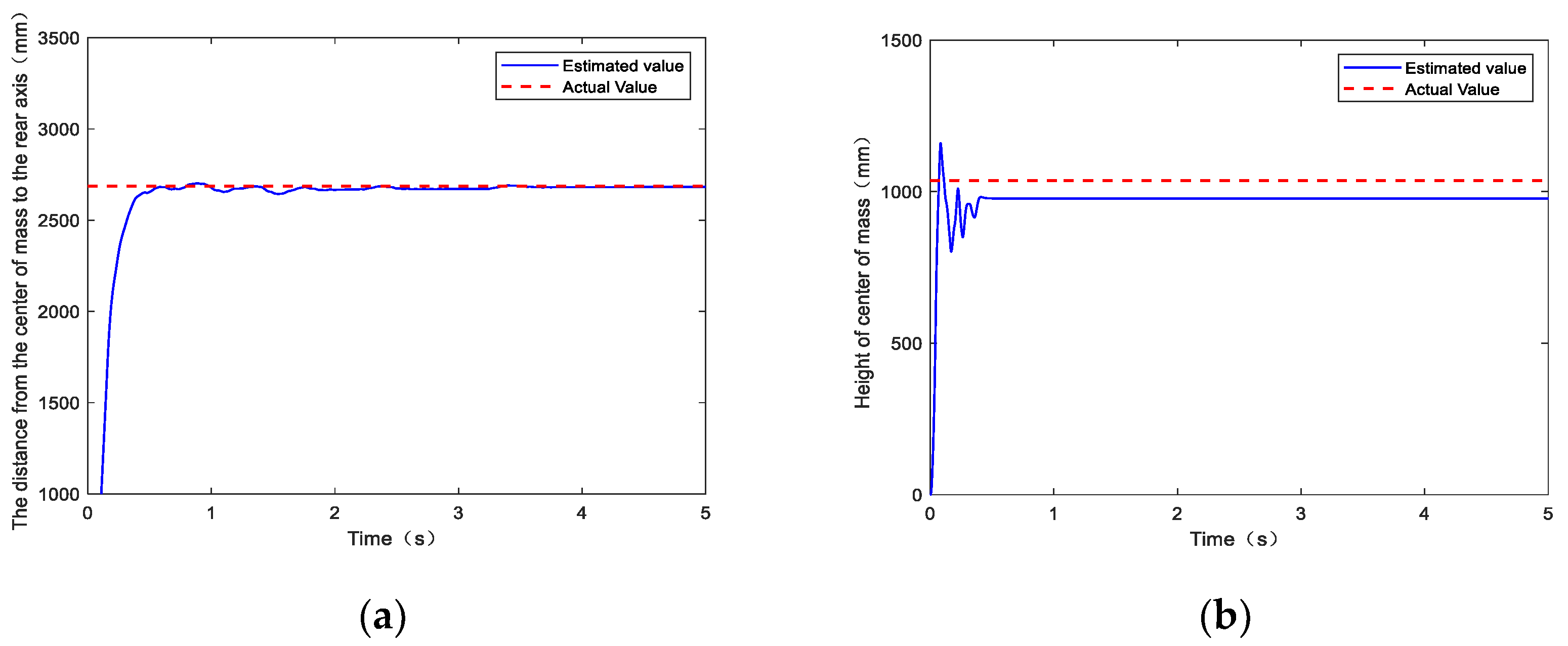
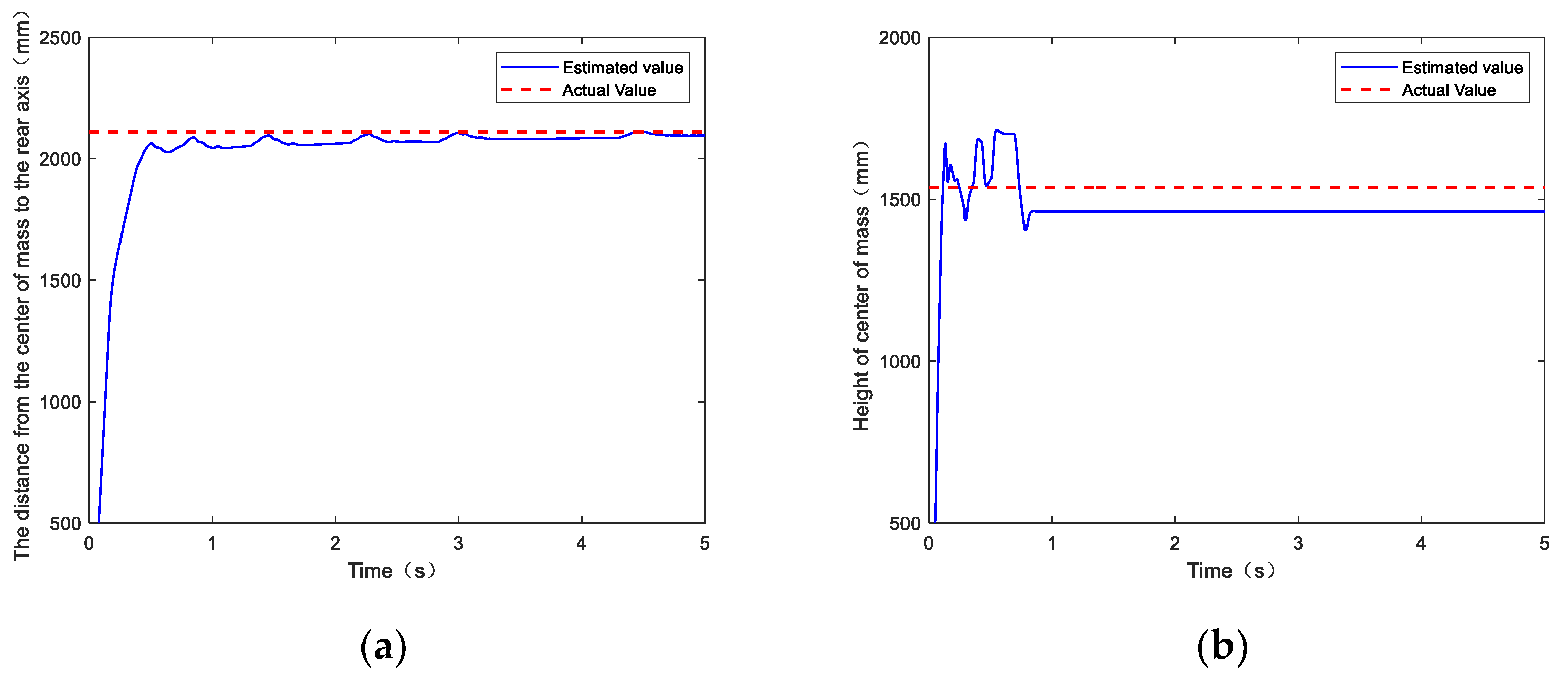
The braking force distribution strategy is based on the desired deceleration, vehicle mass, road grade, the center of gravity position, and other parameters. Firstly, the braking force required by the vehicle is determined based on the desired deceleration , the vehicle mass, and road grade of the AEBS, and then the axle load of the front and rear axles during braking is calculated and the front and rear axle braking force is distributed.
First, the braking force required by the vehicle is calculated according to Equation (31).
where
is the vehicle mass and
is the desired deceleration.
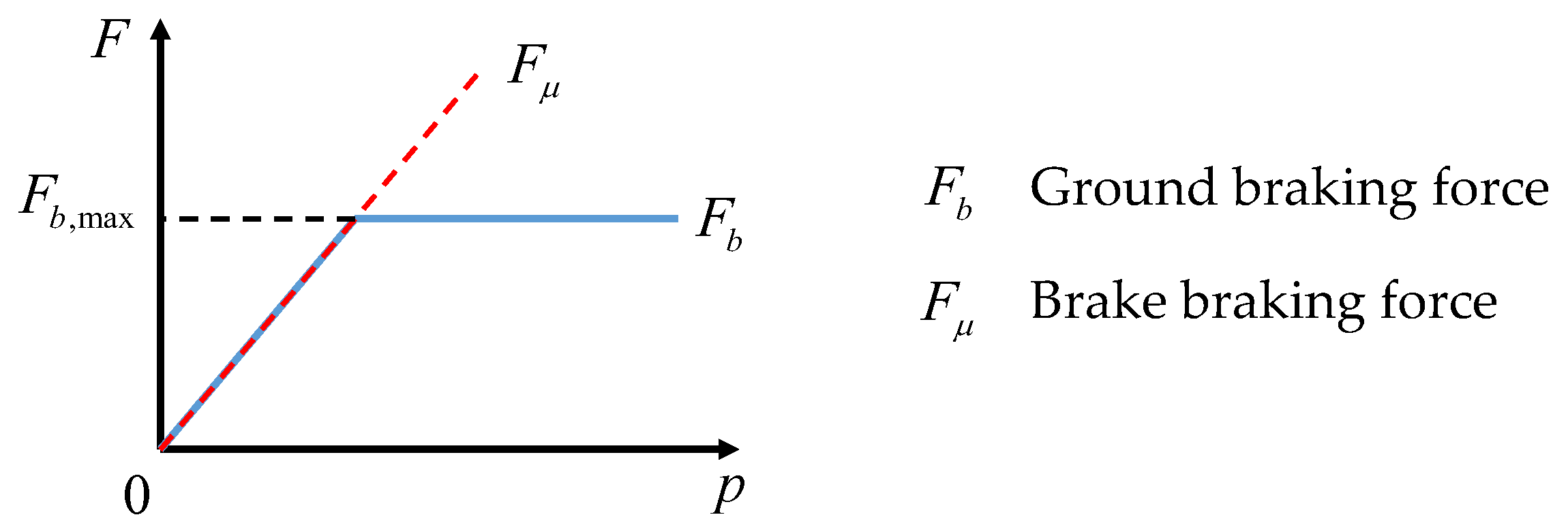
From
Figure 16, when the wheel does not reach the road friction limit, the brake braking force is equal to the ground braking force, i.e.,
. The total brake braking force can be determined from the total demand ground braking force.
Next, the normal force of the ground on the wheel is calculated. From the vehicle longitudinal dynamics equation, ignoring the effect of air resistance and rolling resistance, the normal reaction force of the ground on the wheels is:
where
and
are the normal reaction forces of the ground on the front and rear wheels, respectively.
The front and rear axle braking forces are distributed according to the normal force of the ground on the wheels. When the front and rear axle braking force is distributed, it is necessary to ensure that the front and rear wheels utilize the same road friction.
where
and
are the front and rear axle braking forces at the current brake deceleration.
Finally, in regards to distributing the wheel braking force, the braking force is equally distributed between the left and right wheels of the same axle, and when braking on special roads, such as opposing roads, the braking force is adjusted by the ABS to ensure the braking safety of the vehicle as a priority.
where
,
,
,
,denote the braking force of the four wheels.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}